
基于自适应功率调节的多端柔性直流配电网主从控制策略
2022-03-30 12:49余江盛黄匀飞袁灿培张育宾陈喆李海波江坷滕
广东电力 2022年3期
余江盛, 黄匀飞, 袁灿培, 张育宾, 陈喆, 李海波, 江坷滕
(1. 广东电网有限责任公司东莞供电局, 广东 东莞 523109;2. 清华四川能源互联网研究院,四川 成都 610213)
可再生能源大多通过直流形式接入现有电网,多端柔性直流配电网(multi-terminal flexible DC distribution network,MFDCDN)凭借换流环节少、损耗低、投资省、占地少、容量大、控制灵活等优势,在中低压配电系统得到广泛的关注与应用[1-4]。但是MFDCDN的控制依然存在很多问题,例如:直流电压受传输功率和实时潮流的影响,容易产生电压偏差,在阈值附近波动,影响供电可靠性和系统稳定性;系统发生故障等工况切换时,系统动态响应特性差,过渡时间冗长,过电压现象明显,可能导致系统失衡[5];某些换流站控制方法需要考虑其他换流站状态,模式切换的判据难以确定,且高度依赖通信系统进行信号传递,对通信系统的同步能力要求高,增加了系统不确定性[6]。
MFDCDN的控制模式主要分为主从控制(master-slave control, MSC)和下垂控制[1]。MSC模式能有效控制系统额定电压稳定在给定值附近,但是工况变化的暂态过程调节速度慢,可能导致电压超调、换流站过载等问题,且高度依赖通信系统。下垂控制模式可根据系统电压动态调节输出功率,能实现系统功率的快速调节,并且便于模块化拓展,但是存在电压有偏差、下垂系数整定困难等问题。
为了改进MSC和下垂控制的控制性能,相关学者在控制结构和下垂系数的优化整定方面开展了大量研究。文献[7-10]基于MSC策略,提出改进的电压控制,但是无法解决系统电压存在偏差的问题,并且高度依赖通信系统的电流分配系数。
下垂控制工作原理为交流频率有差调节。文献[11-14]采用常规下垂控制,摆脱了对站间通信的依赖。文献[15]研究了电压或功率先到达极限2种情况。文献[16]提出采用带电压死区的下垂控制。文献[17]提出一种改进荷电状态下垂控制策略,根据策略合理分配负荷功率,减小母线电压偏差。文献[18]对比下垂控制的4种控制方式,通过理论、稳定性分析和仿真,研究交流/直流负荷波动、换流器故障场景下的控制效果,以及下垂系数对系统动态特性和阻尼特性的影响,对下垂控制模式的选取和参数的设计有较大借鉴意义。文献[19]对下垂控制进行分析,提出一种新的下垂系数设计方法。文献[20]提出一种基于下垂控制的无缝切换控制策略,以保证换流站功率的合理分配。文献[21-22]基于下垂控制,提出自适应调节斜率的控制方法,能够减小电压偏差。但以上研究中,下垂控制在工况切换时存在较大的过电压,稳态运行下直流电压存在偏差。为了解决下垂控制中电压偏差的问题,有学者提出了集中式二次控制和分布式二次控制,然而,集中式二次控制容易产生单点故障[23],分布式二次控制高度依赖通信系统[24]。为了避免下垂控制中的电压跌落、参数不确定性和系统干扰对直流电压的影响,文献[25]提出鲁棒下垂控制,但是仍然存在工况切换过程中超调过大的问题。
综上所述可知:MSC模式精度高,系统电压质量高,但是对主换流站的容量和可靠性要求高,还必须通过上层系统进行协调控制,对通信系统有很强的依赖性,运行可靠性低,其改进措施难以自主调节;下垂控制模式存在直流电压难以达到目标稳态值、工况切换时超调大、波动幅度较大、稳态电压偏差难以消除、控制参数难以整定等问题[26],难以实现换流站功率的自由交换,而且针对下垂控制稳态误差的改进侧重于添加更加复杂的修正措施,进一步加大了参数整定的复杂度。因此,为了在不依赖通信系统的前提下,通过简单的控制逻辑改进和参数设计,实现MFDCDN的电压无偏差、无超调、高可靠、自适应、稳定控制,本文分析MFDCDN的典型拓扑结构和运行方式,通过自适应功率调节对MSC进行改进,提出自适应主从控制(adaptive master-slave control,AMSC)策略;最后,在PSCAD/EMTDC平台搭建时序仿真模型,对所提控制策略的动静态性能和韧性进行验证。
1 MFDCDN及传统控制策略分析
1.1 MFDCDN典型拓扑结构
MFDCDN是交流输电系统与直流供电系统间的重要组成部分,其典型接线形式包括辐射型、手拉手(背靠背)、T型、环形和网格型。辐射型接线具有结构简单、投资少的优点,但是缺乏合理的规划布局,可靠性差,无法保障用户用电;环形和网格型供电时,仅满足“N-1”供电原则,无力应对重要负荷两端同时断电的特殊情况。因此,本文选择可靠性相对较高的T型接线作为分析对象,将重要负荷设置为T字交叉节点,使其满足“N-2”供电原则。本文以三端口系统为例,其系统拓扑结构如图1所示,主要由交流电源变电站1—3、电压源换流器(voltage source converter,VSC)1—3、直流线路①—⑤、断路器、储能和交直流负荷组成。

图1 MFDCDN T型接线典型拓扑结构Fig.1 Typical topology of T-connection MFDCDN


图2 MFDCDN典型控制策略的工作原理Fig.2 Typical strategy principle of MFDCDN
1.2 MSC策略分析
针对图1所示的MFDCDN系统,假设变电站1容量足够调节该配电系统电压,设置为功率平衡站,VSC1采用定直流电压控制,其控制框图如图3(a)所示,其中:Udcref1、idref1分别为VSC1直流侧电压参考值、d轴电流参考值;Udc1为VSC1直流侧实际电压;KP1、KI1分别为主站直流电压调节控制器的比例参数、积分参数;idmax、idmin分别为d轴电流id的上下限值;s为拉普拉斯算子。VSC2和VSC3采用定功率控制,其控制框图如图3(b)所示,其中:idref2为VSC2的d轴电流参考值;Ps2、Psref2分别为VSC2的实时功率、功率参考值;KP2、KI2分别为从站有功功率调节控制器的比例参数、积分参数;usd为交流网侧电压的d轴分量。

图3 MSC框图Fig.3 Block diagram of master-slave control
根据图3(a)可知,MFDCDN电压的调节主要由变电站1承担,直流端电压Udc1与idref1之间的关系为
idref1=(Udcref1-Udc1)(KP1+KI1/s).
(1)
其次,当交流系统电压Us与假设的d轴方向一致时,与直流系统连接处的并网联结点的功率
Ps=Usid.
(2)
结合式(1)可知,MSC下系统功率波动
ΔPs1,msc=UsΔid=-Us(KP1+KI1/s)ΔUdc1.
(3)
式中:Δid为d轴电流差值;ΔUdc1为主站直流侧电压差值。
由式(3)可知:MSC下系统功率波动主要与主站直流电压波动有关,并且通过1组PI控制器进行调节,调节速度慢;只有1个功率平衡站参与电压调节,调节能力有限;当系统功率波动时,容易导致系统电压的波动。
1.3 下垂控制策略分析
针对图1所示的MFDCDN,当采用图2(c)所示的下垂控制时,假设与交流电网连接的VSC1—VSC3均采用下垂控制,其控制框图如图4所示,其中:Udci、Udcrefi分别为与VSCi(i=1,2,3)相连的直流配电网线路电压及其参考值;Psi、Psrefi分别为与VSCi相连的直流配网线路传输功率及其参考值;Ki为下垂系数;KPi、KIi分别为VSCi系统主控制器的比例参数、积分参数;idrefi为VSCi的d轴电流参考值。
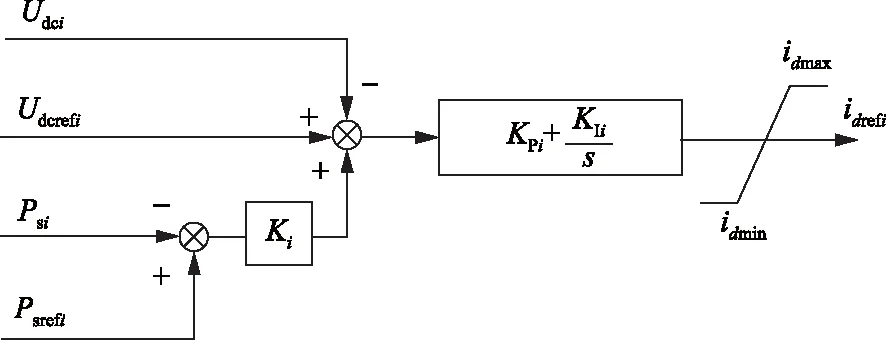
图4 下垂控制框图Fig.4 Block diagram of drop control
根据图4的下垂控制结构,换流站VSCi的d轴电流参考值
idrefi=[Ki(Psrefi-Psi)+Udcrefi-Udci]×
(KPi+KIi/s).
(4)
结合式(1)可知,在采用下垂控制的换流站中,引入了斜率对功率偏差进行补偿,同样的控制参数下,调节速度更快。基于式(2)的假设,下垂控制下系统功率波动ΔPsi,dc与电压波动ΔUdci之间的关系为
(5)
结合式(3)可知,由于下垂控制系数Ki<0,并且存在多个下垂控制站,因此能够更加快速地调节系统电压。但是由于参数敏感,调节速度快,容易导致调节过程出现功率超调或波动,造成换流站过载;并且系统无法稳定在给定电压参考值,存在一定的稳态误差。
2 AMSC策略
通过前文的分析可知,下垂控制中通过引入功率偏差可以加快电压调节速度,增强系统调节能力和效率,避免对通信系统的依赖。因此,本文基于MSC,引入自适应功率调节,对定功率站的电压偏差进行补偿,实现不依赖通信的电压控制,同时减小各站点的功率偏差和系统电压偏差。
2.1 AMSC策略概念与机理
由图1可知,MSC下的MFDCDN系统由主站和从站分别对系统直流电压和有功功率进行独立控制,无法动态快速协调系统功率偏差导致的电压波动。因此,在功率偏差计算环节,添加系统电压的动态补偿项,建立AMSC模型,实时反馈系统电压偏差,并进行补偿控制,实现电压无差控制,其控制框图如图3所示。当系统直流端电压Udc不等于参考值Udcref时,电压动态补偿环节持续对有功功率进行补偿,直到系统直流电压Udc恢复到额定值时补偿环节输出为0,实现电压的无差控制。
AMSC框图如图5所示,其中:Qdci、Qdcrefi分别为VSCi(i=1,2,3)的实时无功功率、无功功率参考值;KP1i、KI1i分别为VSCi有功功率调节控制器的比例参数和积分参数;KP2i、KI2i分别为VSCi无功功率调节控制器的比例参数、积分参数;KP3i、KI3i分别为VSCi直流电压调节控制器的比例参数、积分参数;idi、iqi分别为VSCi控制器d轴、q轴电流值;iqmax、iqmin分别为q轴电流iq的上下限值;iqrefi为VSCi控制器q轴电流参考值;usq为交流网侧电压的q轴分量;Urd、Urq分别为d轴、q轴电压输出值;ωL为电网角频率。

图5 AMSC框图Fig.5 Block diagram of adaptive master-slave control
由图5可知,Udci和idrefi存在如下关系:
idrefi=[(KP3i+KI3i/s)(Udcrefi-Udci)+
Psrefi-Psi](KP1i+KI1i/s).
(6)
2.2 AMSC策略特性分析
基于式(2)的假设,AMSC下系统功率波动值ΔPsi,AMSC与电压波动ΔUdci之间的关系为
ΔPsi,AMSC=


(7)
式中:H(s)为传递函数;ΔPsi,msc为MSC下系统功率波动值。
结合式(3)可知,与传统MSC相比,AMSC添加了电压误差补偿项,相当于引入串联校正函数H(s),增加了功率修正项,能更加快速地修正由功率不匹配导致的电压偏差,并且可以设置多个备用站采用AMSC,同时参与电压偏差的调节,加强系统稳定性,加快系统调节速度。与下垂控制相比,AMSC能实现电压无差控制,避免换流站过载;与MSC相比,AMSC能通过监测系统网压,对系统电压变化作题出快速响应,避免对通信系统的依赖。
综上所述,本文所提的AMSC在系统稳态运行过程中能够实现主站电压和从站功率的准确控制。当遇到主站退出等系统故障时,在系统暂态调节的动态过程中,根据电压偏差实时调整备用主站参考功率,电压信号可以通过电力系统进行实时测量,不受通信系统的约束和影响,实现了不依赖通信的自适应无差调节,在保障系统负荷正常供电的同时,使各换流站工作在系统额定电压,避免了换流站过载运行,提高了系统的安全稳定性和供电可靠性。
3 仿真验证
为了验证所提AMSC策略在不依赖通信系统条件下的动态响应效果和稳态运行特性,本文选择MSC、季一润提出的典型控制(typical operation control by JI,TO-J)[7]与AMSC进行对比分析。根据图1所示的拓扑结构,在PSCAD中分别基于MSC、AMSC和TO-J策略搭建时序仿真模型,VSC1、VSC2和VSC3分别代表主站、备用主站和从站。考虑到实际应用场景中同时需要2个备用主站参与电压调节的极端情况极少,因此备用主站VSC2采用AMSC策略,从站VSC3采用传统PQ控制。模型搭载了2个容量为2 MW的储能单元和1个容量为2 MW的直流负载,其他相关控制模式和参数见表1,其中S为各换流站的额定容量。
为了分析所提控制策略对系统故障或动作后的响应效果,分别设置负载切除和主站退出等工况,通过系统各端口电压和有功出力等信号,验证所提控制策略的控制效果。
3.1 场景1——负荷切除
场景1模拟负载退出运行导致系统功率过剩,并且超过了主站调节能力,导致直流母线电压上升超过正常值的运行场景。在仿真中,VSC2发出12 MW功率,VSC3发出10 MW功率,设置6 MW的负载在1 s时退出运行,AMSC和TO-J检测直流母线电压过高自动投入运行,参与三端供电系统的功率调节,各变电站的电压和功率仿真波形如图6、图7所示。

表1 不同控制策略下仿真系统主要参数情况Tab.1 Main parameters of the simulation system under different control strategies

图6 变电站在不同控制策略下的直流电压波形(场景1)Fig.6 DC voltage waveforms of substations under different control methods (case 1)
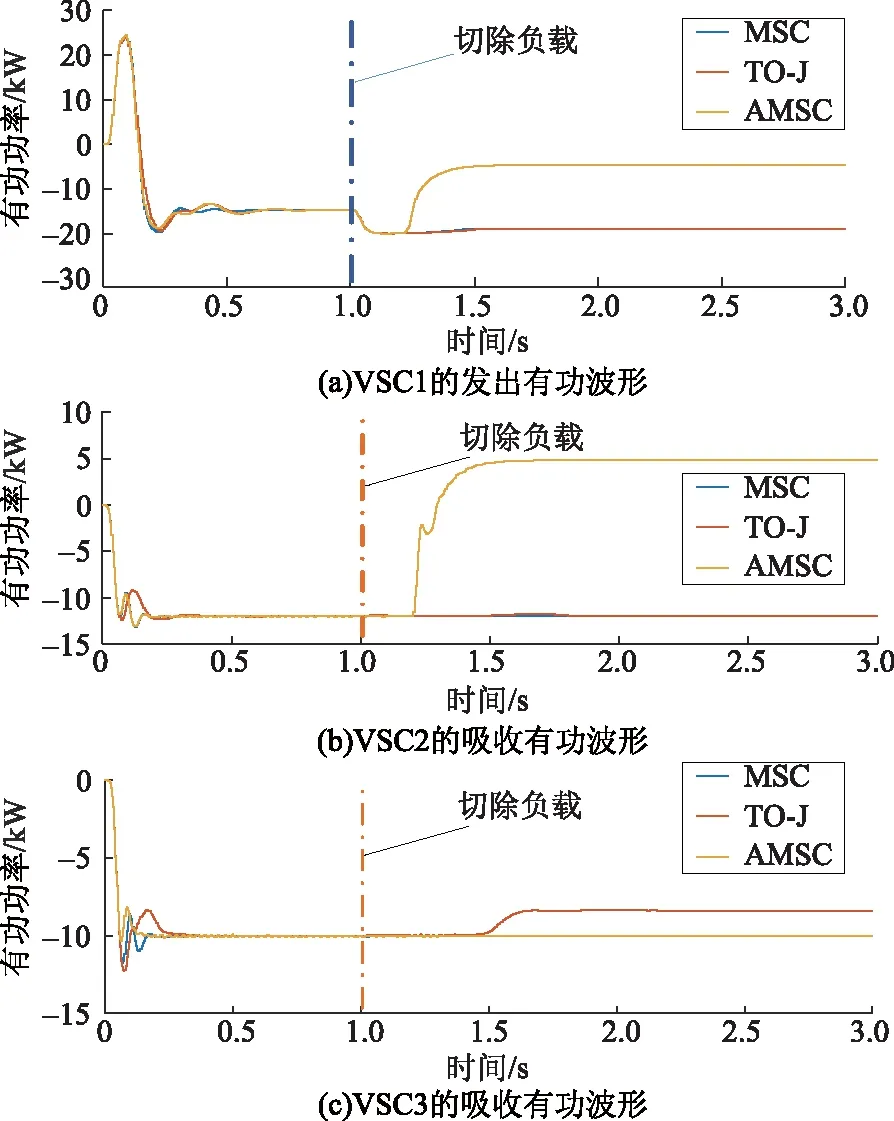
图7 变电站在不同控制策略下的有功功率波形(场景1)Fig.7 Active power waveforms of substations under different control methods (case 1)
通过图6、图7的仿真结果可知,负载退出运行前(0 s—1 s),3种控制策略下,系统电压在0.1 s内迅速稳定在给定值20 kV附近,相关稳态参数见表2,其中ΔP为系统功率损耗。MSC下,VSC2和VSC3分别提供12 MW和10 MW的有功功率,主站VSC1吸收14.8 MW有功功率,系统损耗约为1.2 MW。在AMSC和TO-J策略下,VSC2和VSC3分别提供12 MW和10 MW的有功功率,2种控制策略的系统损耗分别为1.3 MW和1.5 MW。
1 s时切除6 MW负载和储能后,VSC2和VSC3仍然按照系统参考值保持发出22 MW有功功率,超出了主站的调节能力,并导致直流母线电压升高。MSC下的系统电压持续升高,超出系统正常运行电压,系统功率损耗高达3 MW,严重威胁电网的安全运行;AMSC和TO-J能将系统电压稳定在额定电压20 kV附近。然而TO-J策略下,VSC2和VSC3分别出力12 MW和8.3 MW,VSC1约吸收19 MW,接近满负荷状态,并且系统电压抬升至21~22 kV,供电电压偏差达到10%。

表2 系统仿真结果分析Tab.2 System simulation result analysis
在AMSC策略下,负载切除后,当母线电压超过额定电压的6.67%时,VSC2启用AMSC,根据仿真结果可知,系统在切除负荷0.08 s之后,安装在VSC2的AMSC环节投入运行,协助1号主站VSC1控制直流母线电压,使其稳定在20 kV。AMSC环节投入运行后,系统快速响应,在0.2 s内恢复平衡运行状态,VSC3保留10 MW出力,由VSC1和VSC2平衡系统出力,分别吸收4.7 MW和4.8 MW,系统损耗约为0.5 MW,基本实现系统功率平衡,维持系统电压在额定水平。
根据母线电压波形可知,负载的退出对系统电压造成的影响非常小,说明所提控制策略在不依赖通信系统的情况下,能实现系统电压波动的有效采集与监测,及时调整备用主站出力,平衡系统功率缺额,实现系统电压的无差控制。
3.2 场景2——主站退出运行并及时切除负载
场景2模拟了在实际运行场景中由于主站VSC1直流侧或交流侧发生故障,导致主站VSC1退出运行,并且负荷被及时切除的情况。仿真中设置1 s时1号主站因为故障退出运行,2 s时切除负载,仿真结果如图8、图9所示。根据图8、图9的仿真结果可知,主站退出运行前(0 s—1 s)系统运行情况与场景1类似,相关稳态参数见表2。
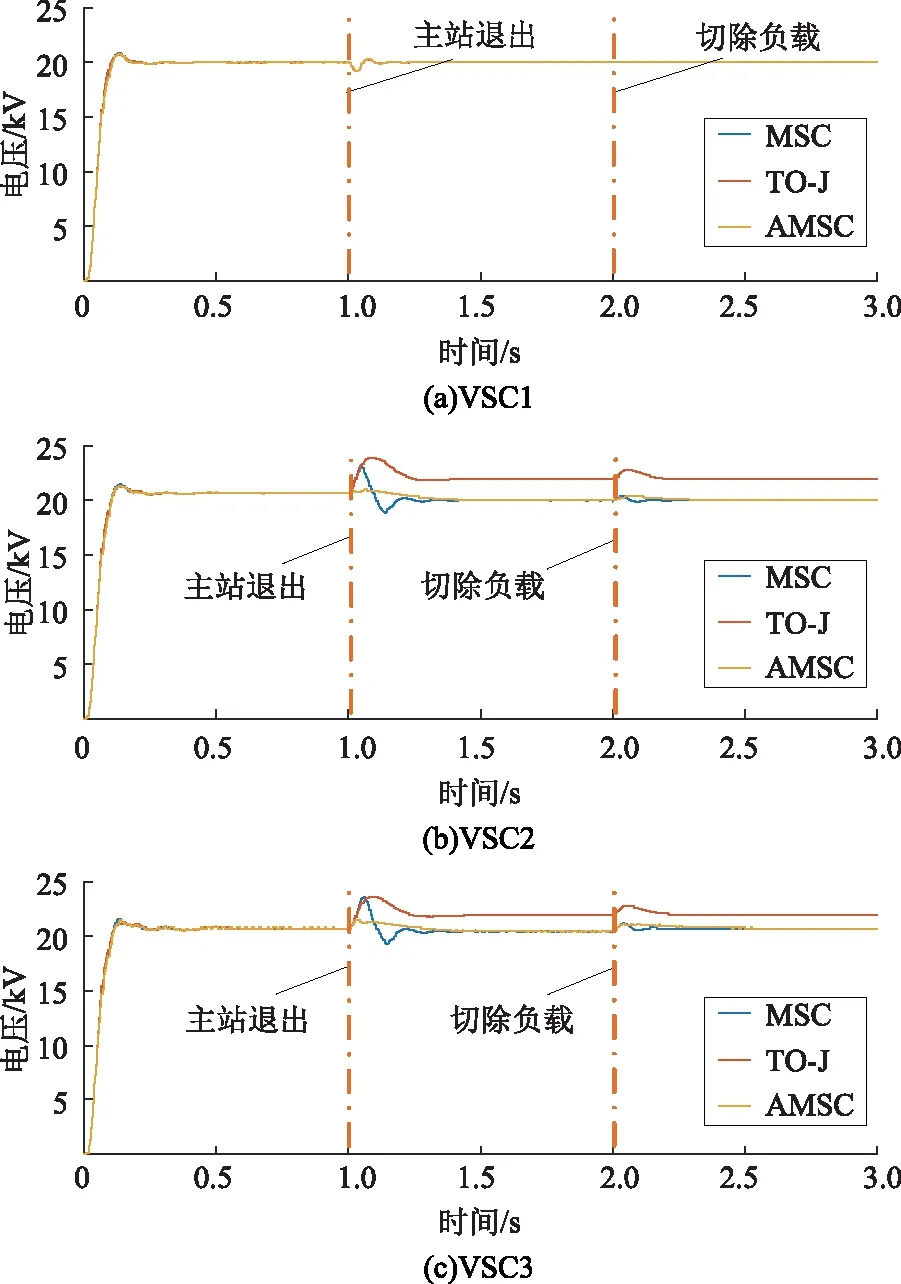
图8 变电站在不同控制策略下的直流电压波形(场景2)Fig.8 DC voltage waveforms of substations under different control methods (case 2)

图9 变电站在不同控制策略下的有功功率波形(场景2)Fig.9 Active power waveforms of substations under different control methods (case 2)
主站退出系统带载运行阶段(1 s—2 s),MSC和TO-J策略下,VSC2和VSC3端的直流电压波动达20%,不满足电压偏差标准,并且VSC2和VSC3的出力剧烈震荡,波动范围高达10~15 MW,不利于设备的稳定运转,严重威胁电力系统安全运行。相比之下,本文提出的AMSC策略下,VSC1吸收的功率在0.3 s内降低为0,VSC2迅速响应,由出力12 MW变为吸收3.6 MW,及时平衡消纳VSC3发出的功率,VSC3出力不变,此时VSC2和VSC3端口电压由于系统功率过剩,呈上升趋势,0.08 s后端口电压上升至系统电压上限,触发备用主站VSC2启用AMSC,将系统电压在0.2 s内拉回20 kV,并保持系统在电压无差的情况下稳定运行,系统电压和变电站出力无明显波动,系统电压能快速稳定在给定值附近,实现了电压的无差控制,有利于系统安全平稳过渡,表现出良好的动静态性能。
2 s时系统切除6 MW的负载和储能,系统切除负载后(2 s—3 s),在MSC和TO-J策略下,从站VSC2和VSC3端的直流电压波动达15%,并且TO-J含有10%的稳态偏差。其中MSC策略下,VSC2吸收的功率达到9.4 MW;同时VSC3发出的功率约为10 MW。TO-J策略下,VSC2和VSC3之间达到了功率平衡,流通功率逐步下降接近0,降低了系统损耗和能量传输,在功率控制方面表现出较好的静态性能。
AMSC策略下,备用主站VSC2吸收功率由3.6 MW增加到9.4 MW,几乎完全消纳变电站VSC3的出力。负载切除瞬间,VSC2和VSC3端口电压由于功率过剩,再次呈现上升趋势,0.08 s后端口电压上升至系统电压上限,触发备用主站VSC2启用AMSC,将系统电压在0.2 s内拉回20 kV,并且纹波小,能使系统在电压无差的情况下保持稳定运行。通过各端口的母线电压波形可知,主站和负载的退出对系统电压造成的影响很小,说明AMSC在不依赖通信系统的情况下,能有效检测系统电压波动,及时调整备用主站出力,平衡系统功率缺额,实现系统电压的无差控制。
3.3 场景3——主站退出运行
场景3模拟实际运行场景中多端柔性直流输电工程的主站端由于直流侧或交流侧故障导致主站退出运行,但系统并未切负荷的情况。在仿真中,VSC2发出12 MW功率,VSC3发出10 MW功率,负荷为6 MW,设置主站在1 s时退出运行,仿真结果如图10、图11所示。
由图10、图11可知,主站退出运行前(0 s—1 s),系统电压在0.1 s内迅速稳定在给定值20 kV附近,VSC2和VSC3出力分别为10 MW和12 MW,VSC1为了平衡系统功率并保持系统电压,吸收14.8 MW,其他相关稳态参数见表2。
1 s时主站退出运行,VSC1吸收的功率在0.2 s内降低为0,MSC、AMSC和TO-J策略都能将系统电压稳定在20 kV左右。MSC策略下,VSC1、VSC2和VSC3的电压均稳定在20 kV左右;TO-J策略下,VSC2和VSC3的电压稳定在22 kV,电压偏差约为10%;AMSC策略下,VSC1、VSC2、VSC3均能稳定在20 kV,展现出良好的静态性能。
在功率平衡方面:MSC策略下,VSC2迅速响应,由出力12 MW变为吸收3.5 MW,但主站退出瞬间VSC2功率超调达到2.67倍,VSC3的出力保持为10 MW不变;TO-J策略下,VSC2和VSC3的功率出力在控制器调节下逐渐减小,但系统电压不能稳定在给定值;AMSC策略下,VSC2的出力由吸收12 MW变为发出3.6 MW,VSC3稳态出力不变保持在10 MW;TO-J策略下VSC3出力变化响应时间长达0.4 s,VSC2和VSC3一起为负荷供电。

图10 变电站在不同控制策略下的直流电压波形(场景3)Fig.10 DC voltage waveforms of substations under different control methods (case 3)

图11 变电站在不同控制策略下的有功功率波形(场景3)Fig.11 Active power waveforms of substations under different control methods (case 3)
AMSC策略下,主站退出瞬间,VSC2和VSC3端口电压由于系统功率过剩,呈上升趋势,0.05 s后VSC2端口电压上升至系统电压上限,触发备用主站VSC2启用AMSC,将系统电压在0.2 s内拉回20 kV,并保持系统在电压无差的情况下稳定运行。根据图8、图9的仿真结果可知,AMSC策略下,当VSC2和VSC3出力不超过VSC2的调节范围时,主站的退出对系统电压造成的影响较小,说明所提控制策略能有效应对主站退出导致的故障,具有较强的韧性;备用主站VSC2通过检测系统电压幅值,可以及时调整出力,平衡系统功率缺额,实现系统电压的无差控制,摆脱对通信系统的依赖。
4 结论
本文首先结合实际工程架构介绍了MFDCDN的拓扑结构和传统控制策略;其次,对比分析MSC和下垂控制的动静态性能和优缺点,并针对MSC对通信设备的依赖性和下垂控制存在的电压偏差,在定有功功率的内环控制中引入电压偏差补偿环节,提出了AMSC,并从理论上推导分析了AMSC中系统功率波动与电压波动之间的关系;最后,在PSCAD/EMTDC上搭建仿真模型,验证了所提方案的有效性。具体结论如下:
a)通过AMSC功率波动的理论模型可知,AMSC与MSC相比,引入了串联校正函数,添加了电压误差补偿项实现功率修正,能更快修正由功率不匹配导致的电压偏差。
b)可以通过在多个备用站采用AMSC,同时参与电压偏差的调节,加强系统稳定性,加快系统调节速度。
c)与下垂控制相比,AMSC能根据系统电压偏差快速准确地调整变电站出力,实现系统电压和出力的快速、无差调节,避免换流站过载;与MSC相比,AMSC能对系统电压变化作出快速响应,避免对通信系统的依赖。
d)通过分析负载和主站退出等运行工况,与传统MSC和典型控制策略相比,本文所提控制策略结构简单,具有独立运行自主调节的功能,不仅能实现系统电压的无差控制,并且能够平衡不同变电站出力变化,减少系统损耗,具有较大的工程指导意义。
猜你喜欢
电力设备管理(2022年4期)2022-11-25
南方能源建设(2021年4期)2021-12-27
电子乐园·中旬刊(2021年1期)2021-09-10
电子制作(2019年22期)2020-01-14
电子制作(2017年23期)2017-02-02
中国新技术新产品(2016年23期)2016-12-26
杭州(2016年1期)2016-08-15
风能(2016年3期)2016-07-05
科技与创新(2015年18期)2015-09-11
汽车零部件(2014年2期)2014-03-11
