顾及接收机UPD的PPP分步模糊度固定方法
2022-03-29 03:15王玮
大地测量与地球动力学 2022年4期
王 玮
1 轨道交通工程信息化国家重点实验室,西安市西影路2号,710043 2 中铁第一勘察设计院集团有限公司,西安市西影路2号,710043
近年来随着GPS和GLONASS现代化的逐步推进以及Galileo和BDS的逐步完善,提供高精度、高可靠性的实时位置服务已成为全球导航卫星系统(GNSS)精密定位的发展趋势和研究热点[1]。精密单点定位(PPP)作为一种高精度的绝对定位手段已在多个领域得到广泛应用,收敛后可在全球任意范围内提供静态cm级、动态dm级的定位精度[2]。然而,由于卫星几何构型变化缓慢以及受实际复杂环境引起的噪声影响,PPP通常需要20~30 min才能收敛到cm量级[3]。
PPP模糊度的正确固定能够显著缩短PPP收敛时间。按照PPP窄巷模糊度的恢复方式可将PPP模糊度固定方法分为两类,一类为估计窄巷硬件延迟小数部分(fractional cycle bias, FCB)方法,如Ge等[4]提出将相位未校准硬件延迟偏差(UPD)与实数模糊度进行分离,服务端通过星间单差方式消除接收机端UPD并发送给用户端,恢复模糊度的整周特性;Li等[5]提出以某一卫星或地面某一测站UPD作为基准,用户端采用非差法整网平差,同时解算出卫星端和接收机端UPD。另一类称为整数恢复钟差(integer-recovery clock, IRC)方法,如Laurichesse等[6]直接将卫星钟差与窄巷硬件延迟进行合并解算,服务端将解算的整数相位钟产品进行播发,用户端无需进行窄项UPD改正即可固定模糊度;Geng等[7]已证明FCB方法与IRC方法在数学上具有等价性,FCB方法在服务端估计时较为方便,IRC方法在用户端固定时较为便捷;Li等[2]针对部分情况下固定模糊度全集较为困难,提出部分模糊度固定策略,根据一定的准则挑选部分模糊度进行固定;Wang等[8]为解决服务端与用户端产品不统一的问题,证明3种FCB产品具有等价性,并进行实验验证;Hu等[9]对服务端多系统FCB产品质量进行分析,并在用户端采用星间单差方式进行PPP模糊度固定。
然而,目前研究主要是针对服务端FCB产品的解算及质量评估,对于用户端PPP模糊度固定的研究较少。当前用户端采用星间单差方式消除接收机端UPD的影响,基准星选取不当会对模糊度固定造成极大影响,从而使PPP模糊度无法固定。因此,本文提出一种顾及接收机UPD的PPP分步模糊度固定方法,用户端基于非差法和服务端FCB产品估计接收机端UPD,并依据PPP窄巷模糊度协方差大小进行分步模糊度固定。
1 数学模型
1.1 传统星间单差方法
对伪距和载波观测量消电离层组合,消除电离层延迟一阶项影响:
(1)


(2)

(3)

(4)
由于窄巷模糊度波长之间存在相关性且其波长较短,通常采用LAMBDA[11]算法进行模糊度搜索固定。固定后的单差模糊度作为约束条件代入滤波器,可得到PPP固定解。
1.2 顾及接收机UPD的分步模糊度固定方法
考虑到接收机端UPD,将UPD表示成虚拟观测方程:
(5)

对于用户端,利用各卫星端UPD对观测卫星的模糊度进行改正,理论上改正后的模糊度仅剩接收机端UPD,具有相近的小数部分。需要注意的是,服务端UPD产品为星间单差UPD,因此改正后的模糊度除接收机端UPD外还包括参考星UPD。将这些接收机端UPD的近似值采用与整数无关的三角函数进行计算,得到接收机端UPD的估计值:
(6)
将得到的接收机端UPD代入PPP模糊度浮点解中,扣除卫星端UPD即可得到整周模糊度估计值。由于估计的接收机端UPD包括参考星UPD,同时服务端UPD为星间单差UPD,因此PPP模糊度浮点解经卫星端UPD产品和所估计的接收机端UPD改正后,可得到整周模糊度估计值。
同理,由于消电离层模糊度不具备整数特性,将其分为宽巷、窄巷分别进行固定。非差宽巷模糊度波长较长,可直接取整固定。
(7)
式中,B为宽巷模糊度浮点解,N为其取整结果,σ为宽巷模糊度中误差。当取整成功率大于0.999 时,认为其正确固定。由固定的宽巷模糊度和消电离层模糊度可得到窄巷模糊度浮点解:
(8)
同理,窄巷模糊度浮点解经卫星端和接收机端UPD改正后,由于其波长较短且模糊度之间具有相关性,可采用分步模糊度固定方法:
2)采用LAMBDA[11]算法对非差窄巷模糊度进行降相关并搜索,若通过Ratio值检验则认为PPP模糊度固定成功,否则进入步骤3)。
3)对非差窄巷模糊度进行降维处理,即删去协方差最大的模糊度,对剩余模糊度子集进行固定,若通过Ratio值检验则输出PPP固定解。否则重复步骤2)、3),直至PPP模糊度成功固定,或者窄巷模糊度维数小于4按照PPP浮点解输出。
2 实验与分析
选取全球225个MGEX(multi-GNSS experiment)测站作为服务端进行UPD产品的生成与发布,观测日期为2019年年积日81。另选取未参与服务端解算的14个MGEX测站作为用户端,以验证方法的有效性。测站真值坐标选取SINEX(solution independent exchange format)周解。表1为服务端UPD解算策略,采用消电离层组合消去电离层延迟一阶项影响,数据采样率为30 s,卫星截止高度角设为10°。卫星轨道和钟差均采用德国地学研究中心(German research centre for geosciences, GFZ)发布的精密产品进行改正,对流层湿延迟采用随机游走模型进行估计,接收机钟差当作白噪声进行估计。

表1 服务端UPD解算策略
服务端采用非差法进行UPD估计,由于卫星宽巷UPD较为稳定,一天估计一组,而卫星窄巷UPD波动较大,通常15 min估计一组。将生成的UPD产品播发给225个MGEX测站以检验UPD产品的精度。经UPD改正后的PPP宽巷和窄巷模糊度残差分布如图1所示,从图中可以看出,97.4%的宽巷残差和93.6%的窄巷残差分布在±0.25周之内,表明服务端生成的UPD产品具有较好的精度,可以播发给用户端使用。
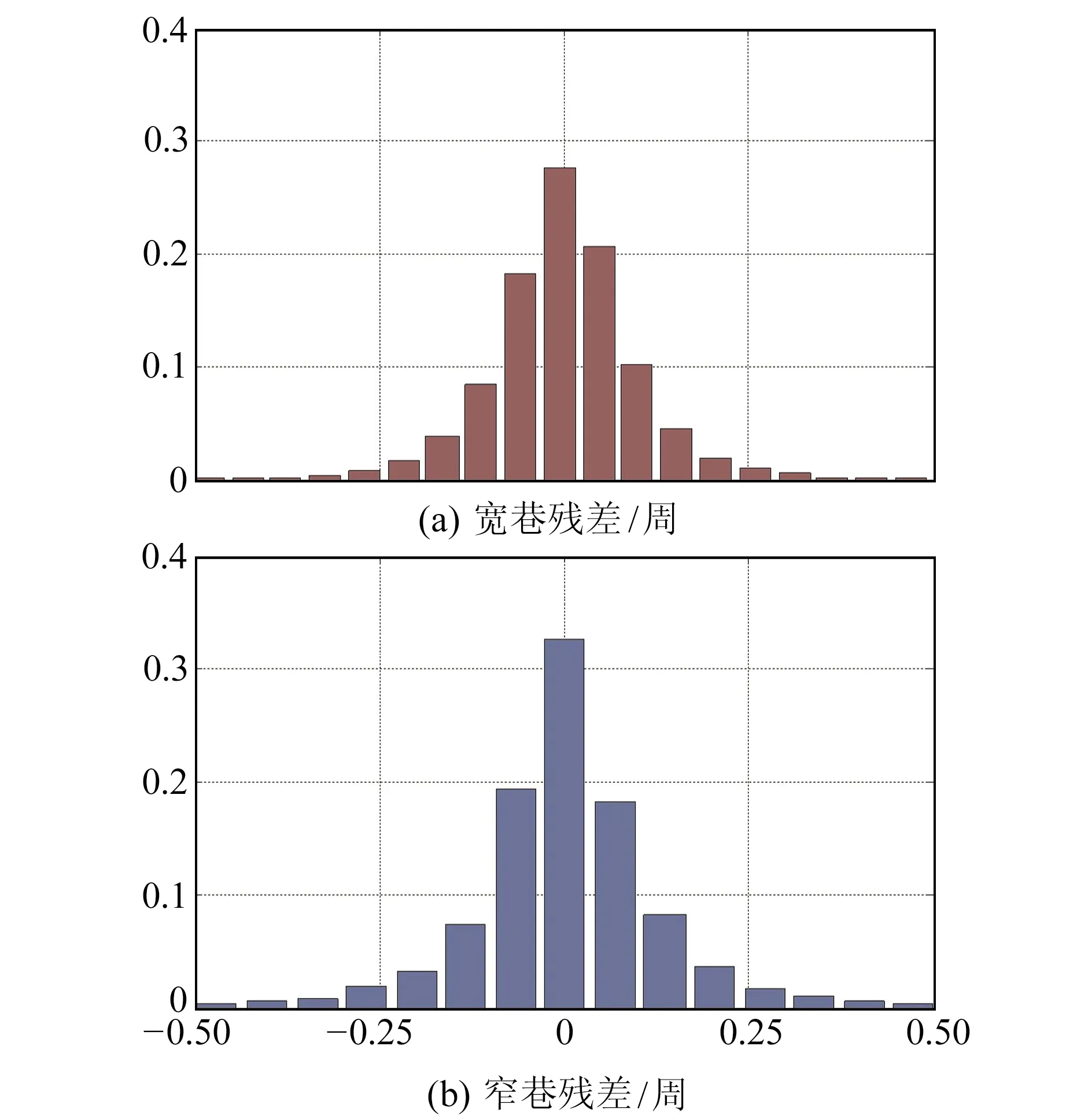
图1 经UPD产品改正后的宽巷残差和窄巷残差分布
对于全球用户端14个MGEX测站,分别采用PPP浮点解(PPP-Float)、常规PPP星间单差法固定模糊度(PPPAR-SD)和顾及接收机UPD的分步模糊度固定方法(PPPAR-UD)进行求解。图2为静态和仿动态条件下CEDU测站3种方法的解算结果,从图中可以看出,PPP模糊度的正确固定能够显著缩短PPP初始化时间,较之传统方法,新方法效果更加显著。

图2 静态和仿动态情况下3种方法的定位结果
图3为静态和仿动态条件下用户端14个MGEX测站采用3种方法在30 min的定位精度,从图中可以看出,静态情况下,PPP浮点解平均精度为7.8 cm,传统星间单差方法为2.5 cm,本文所提方法为1.8 cm。与PPP浮点解相比,静态情况下传统方法和新方法定位精度分别提升68.3%和76.4%。仿动态情况下,PPP浮点解平均精度为14.4 cm,传统星间单差方法为4.9 cm,本文所提方法为2.2 cm。与PPP浮点解相比,仿动态情况下传统方法和新方法定位精度分别提升65.7%和84.7%。从上述分析可以看出,与传统方法相比,无论静态还是仿动态情况下,本文方法都能够显著提高PPP短时间内的定位精度。

图3 静态和仿动态情况下用户端14个MGEX测站的定位精度
为分析用户端14个MGEX测站的收敛时间,收敛条件为N、E、U方向的定位偏差均小于10 cm且其后5 min均满足该条件[12]。图4为静态和仿动态情况下用户端14个MGEX测站采用3种方法的收敛时间,从图中可以看出,静态情况下,PPP浮点解平均精度为22.3 min,传统星间单差方法为9.8 min,本文所提方法为6.7 min。与PPP浮点解相比,静态情况下传统方法和新方法收敛时间分别缩短56.3%和69.9%。仿动态情况下,PPP浮点解平均精度为41.0 min,传统星间单差方法为15.7 min,本文所提方法为11.9 min。与PPP浮点解相比,仿动态情况下传统方法和新方法收敛时间分别缩短61.8%和71.1%。表2为用户端14个MGEX测站的定位精度及收敛时间,从表中可以看出,与传统方法相比,本文所提方法无论在静态还是仿动态情况下均能显著提高PPP短时间内的定位精度和缩短PPP收敛时间。
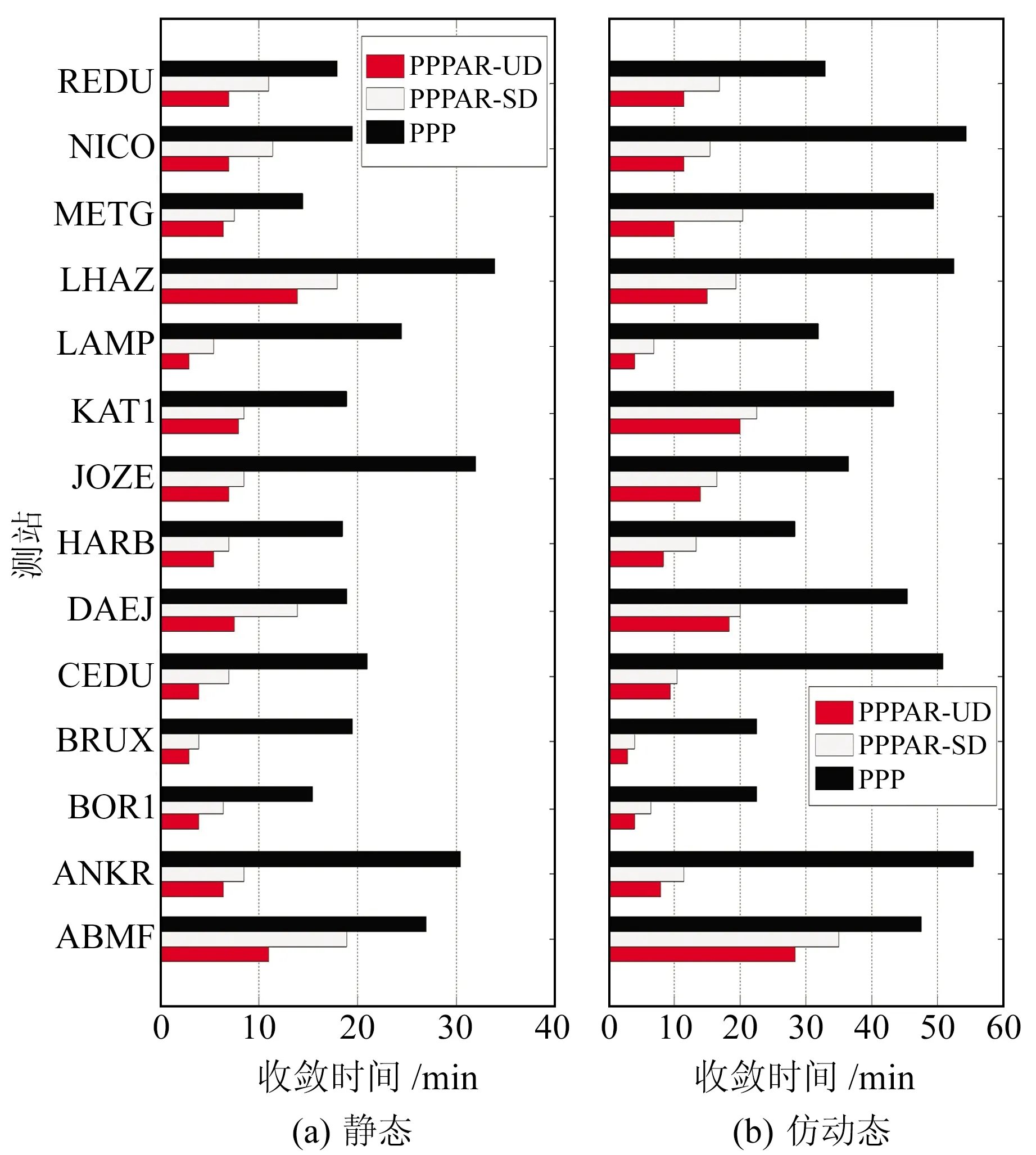
图4 静态和仿动态情况下用户端14个MGEX测站的收敛时间

表2 用户端14个MGEX测站的定位精度及收敛时间统计
3 结 语
针对用户端基准星选取不当对PPP模糊度固定造成干扰,使模糊度固定错误或无法固定的问题,本文提出顾及接收机UPD的PPP分步模糊度固定方法。基于非差法和服务端FCB产品,采用与整数无关的三角函数得到接收机端UPD估计值,依据非差窄巷模糊度协方差大小进行分步模糊度固定。选取全球225个MGEX测站作为服务端进行UPD产品的生成与发布,未参与服务端解算的14个MGEX测站作为用户端进行方法验证。实验结果表明,与PPP浮点解相比,静态情况下传统方法和新方法定位精度分别提升68.3%和76.4%;收敛时间分别缩短56.3%和69.9%。仿动态情况下传统方法和新方法定位精度分别提升65.7%和84.7%;收敛时间分别缩短61.8%和71.1%。与传统方法相比,本文所提方法无论在静态还是仿动态情况下均能显著提升PPP定位精度和缩短收敛时间。
猜你喜欢
扬子江诗刊(2022年1期)2022-10-29
农业工程学报(2022年14期)2022-10-19
导航定位学报(2022年2期)2022-04-11
房地产导刊(2021年12期)2021-12-31
金点子生意(2019年1期)2019-11-21
汽车实用技术(2019年4期)2019-10-21
铁道通信信号(2019年4期)2019-10-10
智富时代(2017年10期)2017-11-22
智富时代(2017年10期)2017-11-22
科技创新与应用(2017年27期)2017-09-19