日界不连续误差对GNSS载波相位频率传递的影响
2022-03-29 02:48张向波胡永辉赵当丽武建锋
大地测量与地球动力学 2022年4期
张向波 郭 际,3 胡永辉,3 赵当丽,3 武建锋,3
1 中国科学院国家授时中心,西安市书院东路3号,710600 2 中国科学院大学,北京市玉泉路19号甲,100049 3 中国科学院时间频率基准重点实验室,西安市书院东路3号,710600
传统PPP通常以1 d为1个批单元进行测站钟差估计,测站钟差序列在天与天边界历元出现跳变,从而产生日界不连续现象。对大多数测站而言,钟差估计结果的日界不连续误差量值一般为几十ps至1 ns,但部分测站的日界不连续误差量值会大于1 ns。日界不连续误差的出现成为实现连续GNSS载波相位时间传递的最大障碍,无法准确反映实时连续运行的两地时钟性能,严重影响两地时钟比对长期频率稳定度的提升。研究表明,日界不连续误差主要由码噪声(包括接收机硬件时延、多径误差等)和卫星精密产品不连续性所引起,相位模糊度与测站钟差估计结果不连续的本质具有一致性[14-17]。
为分析日界不连续误差对GNSS载波相位频率传递的影响,本文基于MGEX/BIPM并址站GPS/BDS观测数据及欧洲定轨中心(CODE)提供的精密轨道和钟差产品,首先分析日界不连续误差的统计特性,然后从理论方面分析日界不连续误差对两地时钟相对频率偏差估计的影响,最后通过实验来验证日界不连续误差对两地时钟频率比对的影响。
1 GNSS载波相位时间传递
1.1 GNSS CP时间传递数学模型
基于码伪距和载波相位测量的GNSS基本观测模型可参见文献[17]。双频组合消除电离层一阶延迟误差的无电离层码伪距和载波相位组合观测模型,即传统PPP模型,可表示为:
dtrop+DPIF+dPIF+dmul/PIF+εPIF
(1)
DLIF+dLIF+λIFNIF+dmul/LIF+εLIF
(2)
式中,PIF和LIF分别为无电离层码伪距和载波相位组合观测值,单位m;dPIF、DPIF、dLIF和DLIF分别为码伪距和载波相位接收机与卫星硬件时延,单位s;NIF为组合模糊度,单位周。
对式(1)和式(2)进行线性化后,采用序贯最小二乘平差对未知参数进行估计,包括测站位置、接收机钟差、天顶对流层延迟和组合模糊度。在解算出两测站钟差后,通过逐历元作差可获得两地时钟比对结果:
ΔTAB=dtr,A-dtr,B=
(Tr,A-IGST)-(Tr,B-IGST)
(3)
1.2 日界不连续误差
1.2.1 产生机理
近年来,全球的制造业正在迈向数字化时代。数字化进程正在改变产业链的每个环节:从研发、供应链、工厂运营到营销、销售和服务。生产商、消费者以及工业实物资产之间的数字化链接将释放出巨大的价值,并彻底刷新制造业的版图。面对这一转变,越来越多的公司进行IT和OT的融合,通过设备、人与服务的互联互通,将传统的工厂升级为数字化工厂,从研发,到制造,再到后期运维,甚至是产品都能做到可视化,让制造过程透明化。未来制造企业的数字化工厂要包含三部分:一是智能化的生产过程;二是智能化的仓储物流;三是智能加工中心的生产线。与此同时,自动化企业也相继在进行向数字化工厂的转变。
测站钟差参数的准确估计是实现两地时间传递的基础,估计结果的连续性对两测站间连续时间传递至关重要。在GNSS观测模型中,测站钟差平均值主要由码伪距观测值决定,而钟差的变化量则取决于载波相位。传统PPP通常以1 d为1个批单元,起始历元处测站钟差的无偏估计是基于码伪距观测值,由于多径及硬件时延等码噪声影响,相位模糊度不再是无偏估计,每日相位模糊度相对真值均存在不确定度,从而使相邻两天的相位模糊度出现不连续现象。而测站钟差与模糊度线性相关,因此测站钟差序列在天与天边界历元处出现时间跳变,即日界不连续误差,如图1中红圈所示。

图1 GPS PPP测站钟差估计结果中日界不连续现象
除周跳、卫星信号被遮挡或接收机失锁等非正常观测外,如图1中绿框所示,测站外接参考时钟正常工作时钟差序列应具有连续性,然而PPP测站钟差估计结果却在相邻两天边界处出现不连续现象。这种不连续误差主要在PPP数据处理时产生,与测站外接参考时钟无关,其量值甚至大于1 ns,而PPP测站钟差解算的精度通常为几百ps,因此日界不连续误差是限制PPP测站钟差估计结果频率稳定度提升的主要因素。
假设PPP测站钟差估计结果dtr可表示为X+Δ,其中X表示钟差真值,Δ表示由于码噪声引起的钟差偏移,日界不连续误差DBD可表示为:
(4)
式中,DBD表示日界不连续误差,上标1表示批单元长度为1 d,下标M、M+1表示第M天与第M+1天。由于Δ取决于整个批单元码噪声的平均值和第1个历元的相位噪声,因此日界不连续误差与码噪声、载波相位噪声等引起的误差均有关。而相位噪声远小于码噪声,因此Δ主要取决于整个批单元所有历元码噪声的平均值。
1.2.2 统计分布
为分析测站钟差估计结果的日界不连续误差,首先需将其提取出来。日界不连续误差可采用2种方法进行提取:1)将当前批单元(1 d)的前5 min测站钟差序列减去前1个批单元的最后5 min结果,称为原始法(图2);2)对相邻2个批单元(2 d)的观测数据进行单独PPP解算,测站钟差分别为X1和X2,然后对这相邻2个批单元进行连续PPP测站钟差解算,测站钟差为X1→2,将X1与X1→2作差得到Δ1-X,X1→2与X2作差得到ΔX-2,最后可得相邻批单元间测站钟差的日界不连续误差为Δ1-2=ΔX-2-Δ1-X。

图2 日界不连续误差提取方法
上述2种方法提取的日界不连续误差的均值基本相同,虽然重叠法(第2种方法)提取的不连续误差STD偏小,但重叠过程会消除短期噪声,无法真实反映码噪声的影响,因此,本文采用原始法(第1种方法)提取PPP测站钟差估计结果的日界不连续误差。
采用传统PPP模型对欧洲3个MGEX测站GPS/BDS观测数据进行解算,分别统计各测站钟差的日界不连续误差。所选测站不仅是MGEX测站,还是BIPM测站,测站外接参考时间分别为UTC(PTB)、UTC(ORB)和UTC(OP)。采用CODE提供的MGEX产品将参考时间统一对齐到IGST后,对2019-03-28~08-24共150 d的GPS/BDS观测数据进行PPP测站钟差解算,即约化儒略日(MJD)为58 570~58 719时段,然后提取测站钟差估计结果的日界不连续误差,结果见图3~5。

图3 PTBB测站钟差的日界不连续误差统计结果
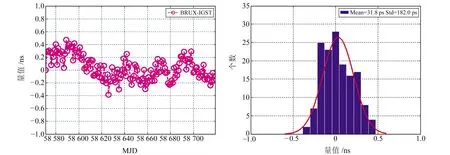
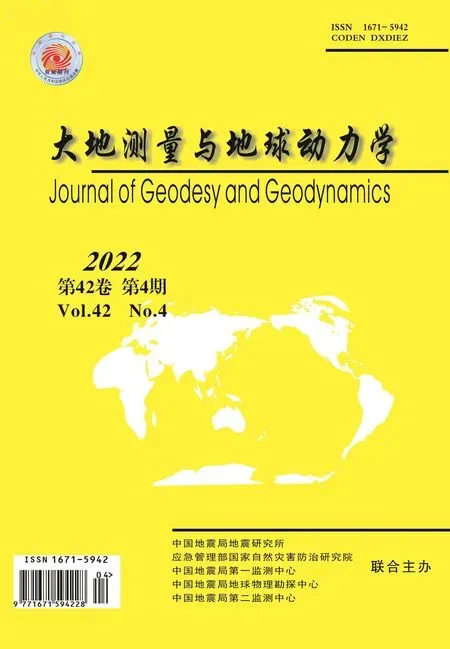
图4 BRUX测站钟差的日界不连续误差统计结果
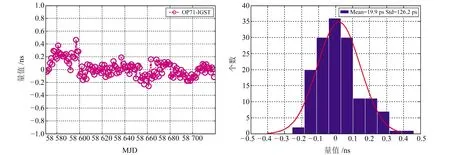
图5 OP71测站钟差的日界不连续误差统计结果
从图3~5可以看出,PTBB、BRUX和OP71测站钟差估计结果的日界不连续误差基本在0.4 ns内波动,均值小于100 ps,Std小于200 ps,基本服从高斯分布。各测站钟差估计结果在相同边界历元处的日界不连续误差水平均不相同,由此可知,PPP测站钟差估计结果的日界不连续误差与测站有关。产生日界不连续误差的原因主要为码噪声和卫星精密产品的不连续性[15,17],日界不连续误差更符合随机游走噪声特性。
1.2.3 改正方法
码噪声是引起PPP测站钟差估计和时间传递中日界不连续误差的主要原因,尽管无法彻底去除码噪声引起的误差,但可以采取多种方法尽量减弱其影响,从而减小相邻批单元间的不连续误差。为消除日界不连续误差,国内外学者相继提出多种方法[18-23],其中移位重叠法简单实用且计算量较小。对于更长批单元PPP,采用移位重叠可显著减小日界不连续误差,提升PPP时间传递的频率稳定度。移位重叠法的原理是在进行第1个批单元(24 h)PPP解算后,从4 h、8 h和12 h历元处重新开始1个新批单元PPP解算,新批单元与先前批单元重叠20 h、16 h或12 h,新批单元会跨越原来2个相邻批单元边界历元,可规避原相邻边界历元处的时间跳变;然后采用重叠段差值来估算不连续误差改正量,采用加权平均来平滑短期噪声;最后重构所需时段的测站钟差。如果重叠时长为12 h,则可以选用相邻2 d中间时段数据作为最终结果,从而减小残余的系统误差,最后逐次遍历所有时段。按此操作原理,可在PPP数据处理时将批单元长度为1 d推广为多天,从而最大程度地减小日界不连续误差,实现连续PPP时间传递(图6)。

图6 移位重叠法原理
1.3 相对频率偏差估计
日界不连续误差使得通过PPP时间传递无法准确反映两地氢原子钟本身的性能。为规避日界不连续误差的影响,首先要消除日界不连续误差,获得连续的时间传递结果,再计算两地时钟的相对频率偏差。
假设PPP解算中第j个批单元包含Nes个时差估计值xj,1,xj,2,…,xj,i,xj,Nes,采样间隔为Δt,则相对频率偏差yi可表示为:
(5)
式中,xj,i和xj,i+1表示第j个批单元中相邻2个历元钟差估计。在获得第j个批单元的相对频率偏差后,可将每个批单元中获得的相对频率偏差进行组合,即可获得任意时段的相对频率偏差,取平均值则为最优频率估计。
在日界不连续误差存在的情况下,要计算相对频率偏差,首先可采用移位重叠法消除PPP时间传递中日界不连续误差而获得连续序列,该过程可表示为:
(6)
式中,mj为第j个和j+1个批单元间的不连续误差。需要强调的是,如果n=0,则xr+n,k-xr,l在同一批批单元中,此时无不连续误差项。由式(6)可以得到:
(7)
因此,包含日界不连续误差项的时间传递钟差序列的相对频率可表示为:
(8)
假设批单元中日界不连续误差估计值的不确定度为um,ux代表1个批单元内相邻钟差估计值的噪声,则根据误差随机模型由式(8)可得含有不连续误差的钟差序列的相对频率不确定度为:
(9)
式(9)需基于以下假设:1)xN,N与x1,1之间互不相关,这在批单元长度N≠1时完全成立;2)第j个批单元与第k个批单元的不连续误差互不相关(如果第j个和第k个批单元为相邻批单元,该项假设将不成立)。从式(9)可以看出,相对频率偏差因为日界不连续误差的存在而出现偏移项,可能导致相对频率偏差估计值在两相邻批单元边界历元处出现跳变,从而难以准确估计总时段中相对频率偏差。
2 实验设计及数据预处理
为验证以上理论分析的正确性,对MGEX/BIPM并址站PTBB、SPT0和USN8在2019-05-21~30(MJD 58 624~58 633)共10 d的GPS/BDS观测数据进行PPP测站钟差估计,采用移位重叠法对PPP时间传递中日界不连续误差进行改正,对比日界不连续误差改正前后UTC(SP)-UTC(PTB)、UTC(USNO)-UTC(PTB)的相对频率偏差。其中,GNSSsave表示日界不连续误差改正后的相对频率偏差估计结果,GNSSmerge表示日界不连续误差改正前的相对频率偏差估计结果,同时以BIPM公布的TAIPPP结果的相对频率偏差作为参考,实验所选测站信息见表1。

表1 实验所选MGEX测站信息
3 实验结果分析及讨论
日界不连续误差改正前后UTC(SP)相对UTC(PTB)的频率偏差及TAIPPP结果如图7所示,10 d平均相对频率偏差见表2。从图中可以看出,未对UTC(SP)-UTC(PTB)中日界不连续误差进行改正时,相对频率偏差估计结果在批单元边界历元处出现很大量值的跳变,导致相对频率偏差出现偏移;对日界不连续误差进行改正后,UTC(SP)与UTC(PTB)相对频率偏差在相应批单元边界处的偏移基本得到消除,相对频率偏差估计结果的变化趋势与TAIPPP基本一致。日界不连续误差改正后,UTC(SP)与UTC(PTB)的10 d平均相对频率偏差GNSSsave为-1.275 2×10-15,TAIPPP平均相对频率偏差为-1.455 1×10-15,日界不连续误差未改正时UTC(SP)与UTC(PTB)平均相对频率偏差GNSSmerge为-1.956 8×10-15。由此可知,未进行日界不连续误差改正时,相对频率偏差在批单元边界处存在很大跳变,导致频率偏差出现偏移;而对日界不连续误差进行改正后,相对频率偏差在相应批单元边界处的偏移基本得到抑制,且变化趋势与TAIPPP基本一致。
图7 UTC(SP)与UTC(PTB)相对频率偏差

表2 UTC(SP)与UTC(PTB)的10 d平均相对频率偏差
日界不连续误差改正前后UTC(USNO)-UTC(PTB)的相对频率偏差如图8所示,10 d平均相对频率偏差见表3。从图中可以看出,日界不连续误差改正前UTC(USNO)与UTC(PTB)相对频率偏差在批单元边界处存在很大跳变,而日界不连续误差改正后相对频率偏差跳变减小,变化趋势与TAIPPP基本一致。日界不连续误差改正后,UTC(USNO)与UTC(PTB)的10 d平均相对频率偏差GNSSsave为-8.220 7×10-16,TAIPPP平均相对频率偏差为-6.968 6×10-16,而日界不连续误差未改正时平均相对频率偏差GNSSmerge为-3.426 7×10-15。
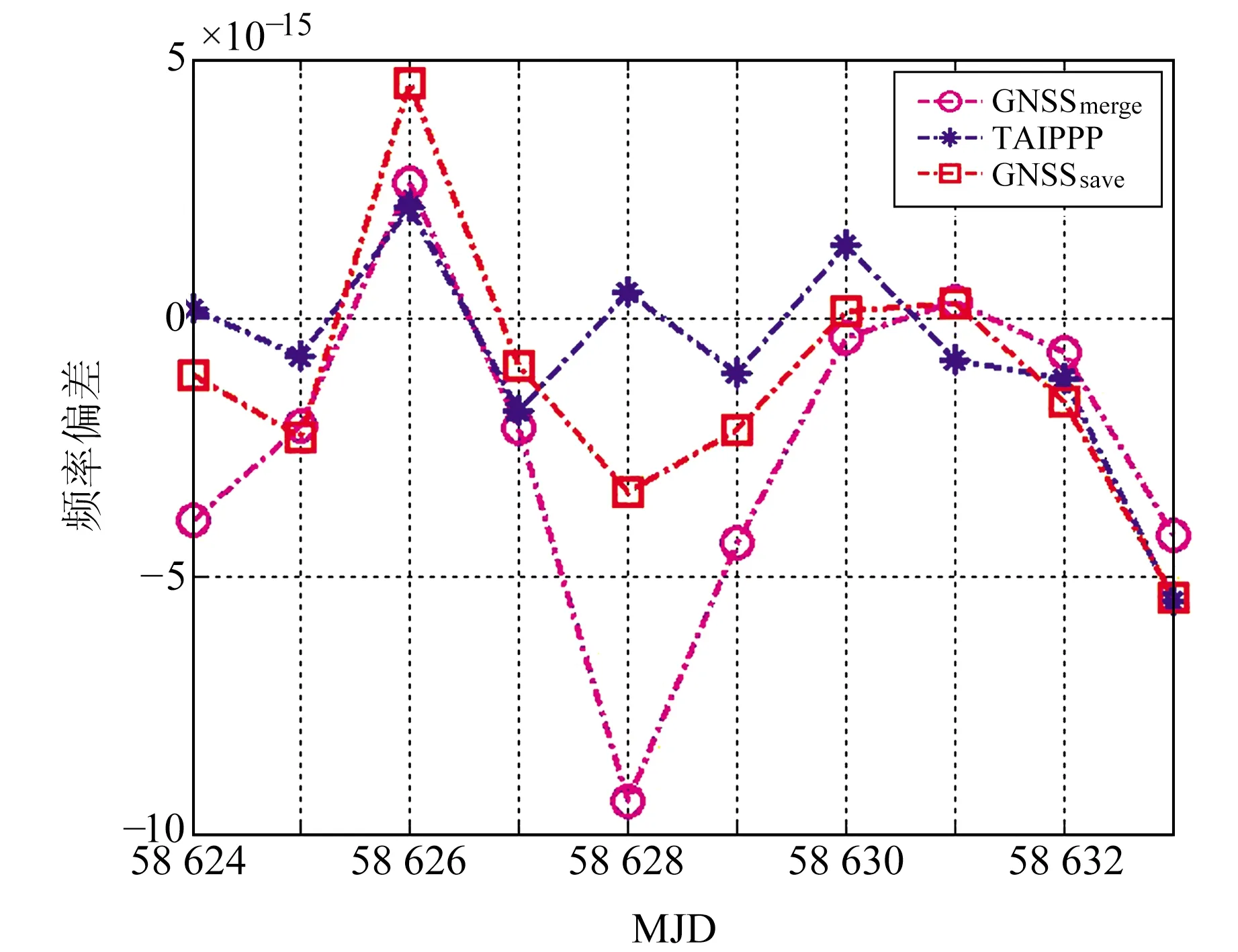
图8 UTC(USNO)与UTC(PTB)相对频率偏差

表3 UTC(USNO)与UTC(PTB)的10 d平均相对频率偏差
为进一步分析日界不连续误差对相对频率偏差的影响,以TAIPPP结果的相对频率偏差为参考,分别计算UTC(SP)-UTC(PTB)、UTC(USNO)-UTC(PTB)日界不连续误差改正前后相对频率偏差与TAIPPP结果相对频率偏差的残差,结果如图9和10所示。从图中可以看出,日界不连续误差改正后,UTC(SP)-UTC(PTB)、UTC(USNO)-UTC(PTB)相对频率偏差的变化趋势更接近TAIPPP,而日界不连续误差改正前UTC(SP)-UTC(PTB)、UTC(USNO)-UTC(PTB)的相对频率偏差与TAIPPP结果相比存在明显跳变。另外,UTC(SP)-UTC(PTB)、UTC(USNO)-UTC(PTB)在日界不连续误差改正后GNSSsave变化趋势更接近TAIPPP,而日界不连续误差改正前GNSSmerge与TAIPPP结果相比存在明显跳变。

图9 UTC(SP)-UTC(PTB)相对频率偏差与TAIPPP的残差

图10 UTC(USNO)-UTC(PTB)相对频率偏差与TAIPPP的残差
综上所述,当测站接收机外接氢钟等高稳时钟时,PPP时间传递中日界不连续误差将引起两地参考频标的相对频率偏差在批单元边界处出现偏移,导致相对频率偏差估计准确度降低。
4 结 语
本文首先介绍GNSS载波相位时间传递中日界不连续误差的统计特性和改正方法,然后从理论上分析日界不连续误差对相对频率偏差估计的影响,最后采用实际数据进行实验验证。结果表明,PPP测站钟差估计结果中日界不连续误差与测站紧密相关,其概率密度基本服从高斯分布;日界不连续误差是限制PPP时间传递准确度和链路稳健性提升的主要障碍;采用PPP估计两测站时钟的相对频率偏差时,日界不连续误差会使相对频率偏差估计结果在相邻批单元边界处出现偏移,使得总时段中相对频率偏差估计结果的准确度降低,严重影响两地时钟频率比对结果。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
测绘地理信息(2022年2期)2022-04-02
陕西水利(2021年5期)2021-06-21
导航定位学报(2020年6期)2021-01-05
中国惯性技术学报(2020年2期)2020-07-24
全球定位系统(2020年1期)2020-03-31
全球定位系统(2019年4期)2019-08-30
导航定位学报(2018年3期)2018-09-03
导航定位学报(2016年4期)2017-01-05
载人航天(2016年4期)2016-12-01