
双向无线电能传输系统恒输出控制分析
2022-03-28 06:31龚国庆
北京信息科技大学学报(自然科学版) 2022年1期
王 宇,龚国庆
(北京信息科技大学 机电工程学院,北京 100192)
0 引言
无线电能传输可以杜绝传统导线传递电能可能导致的电火花、线路老化等安全隐患,在新能源汽车、在线监测设备等领域已经有了一定的应用基础,具有广阔的应用前景[1-4]。随着对无线电能传输研究的逐步深入,双向无线电能传输日益受到关注,从电动汽车到电网(vehicle-to-grid,V2G)的能量互动也成为重点研究对象。V2G技术能够实现电动汽车与电网之间能量的双向传递,并能对电动汽车的充放电过程进行有效的管理,从而减小电动汽车自身负荷对电网的冲击作用,同时也能够对电能进行灵活的管理[5]。目前,已有不少研究提出了关于双向无线充电系统磁耦合、建模、补偿拓扑结构及控制策略的设计方法[6-8],证明了V2G的可行性。
在以往的双向无线充电系统中,能够在电网与任意数量负载之间进行能量传递的系统更加适用于V2G模式。系统通常是在初级侧与接收侧使用相同的拓扑结构与补偿网络,与单向无线充电系统相比,它需要更加复杂和稳定的控制,功率流的方向和大小则由逆变电路所产生的相对相位角与电源电压进行控制。当对电池进行充电时,我们希望系统所传递的有功功率保持在一恒定值,并且接收侧的无功功率尽可能地小。但是,由于参数或组件公差的变化会引起系统的失谐,有时系统无法实现此功能。
文献[9]提出了一种基于无线充电系统频率下垂特性的控制技术来调节功率流的方向和大小,但无法保持有功功率为一恒定值。文献[10]设计了一种具有两个变压器结构的LLC谐振变换器,使用了改变匝数比的方法,对无线充电系统的输出电压进行调节,但该谐振变换器内部结构复杂且功率密度较小。因此研究人员又提出了一种带有可重构电压倍增器整流器结构的新型LLC拓扑结构弥补其不足[11]。文献[12]使用了控制相位的方法,作用于无线充电系统接收侧的有源整流器。该方法主要通过对二阶共振频率进行修改实现系统效率的提高,但其弊端是影响了等效负载阻抗的大小。
本文提出了一种新型的控制结构来克服上述弊端。该控制结构位于双向无线充电系统的接收侧,使用接收侧的有功功率与无功功率来调节接收侧的转换器,从而调节功率流的方向和大小,不需要添加任何无线通信设备来进行控制。它能够使接收侧以预定的功率运行,同时当组件值变化使系统失谐时,系统依然可以保持接收侧的无功功率最小。
1 系统建模与分析
1.1 系统电路模型
V2G结构模式如图1所示,双向无线电能传输系统的初级侧转换器通过AC/DC转换器从电网中获取能量,而接收侧则连接到电动汽车。
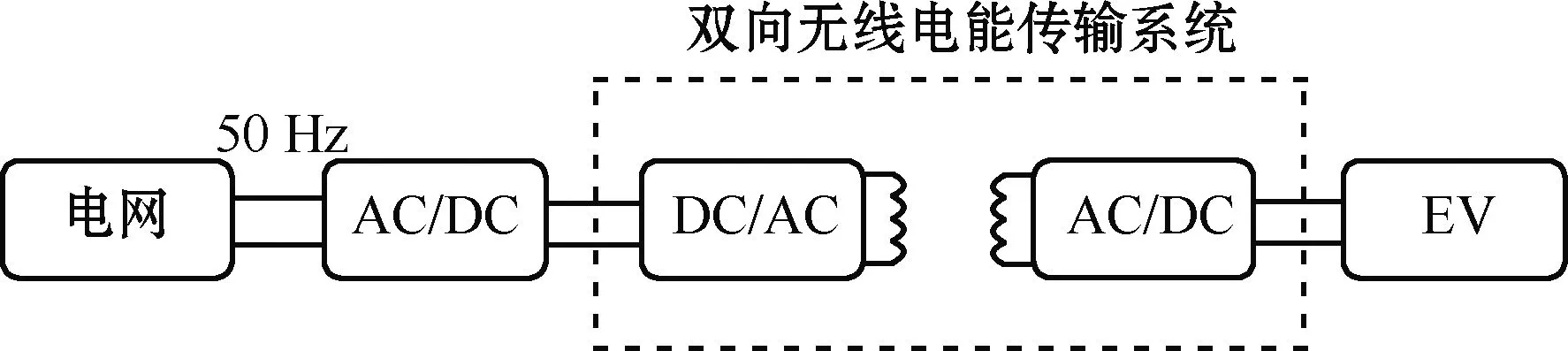
图1 V2G结构模式
图2为典型的单边拾取无线充电系统框架,Vin为输入电压,而接收侧的Vout用来存储能量。为了实现电网与电动汽车之间功率的双向传递,初级侧与接收侧使用相同的电路结构与电子器件。其中电子器件包括一个转换器和一个谐振电感—电容—电感(LCL)电路,初级侧的电感Lpi、Lpt与电容Cpt组成LCL电路,并与接收侧组成LCL电路的电感Lsi、Lst和电容Cst大小对应相等。Lptl与Lstl为该耦合机构的泄漏电感。Lm为磁化电感且Lm=(Np/Ns)×M,其中,M为耦合线圈之间的互感,Np、Ns分别表示初级侧与接收侧耦合线圈的匝数。通过初级侧转换器的电压在初级侧耦合电感Lpt产生一个恒定电流ipt,该电感通过M与接收侧的耦合电感Lst进行耦合。

图2 无线充电系统框架
为了使系统达到谐振状态,将系统调频为
ωT=(2πfT)2=
(1)
通过控制相对相位角与vpi和vsi的大小来控制电网与电动汽车之间功率的大小和方向[10]。如图3所示为典型的转换器开关序列图,转换器的每个开关(Qp1~Qp4、Qs1~Qs4)都以50%的占空比进行通断,且频率为fT。φp与φs分别代表初级侧与接收侧转换器脉冲信号之间的相位差,φp与φs均可以用来控制vpi和vsi的大小。
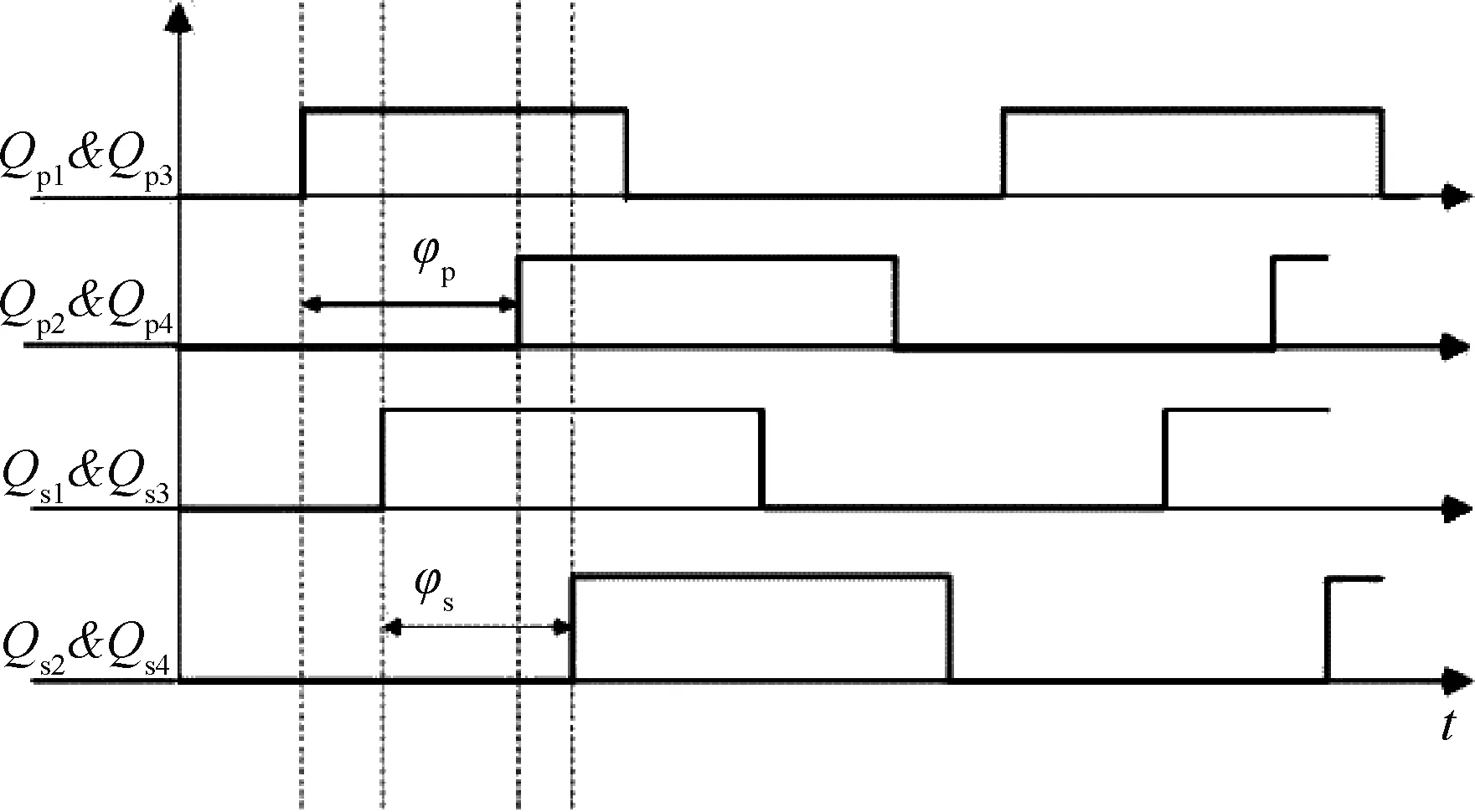
图3 转换器开关序列
1.2 分析
如图4所示,θc代表ipt与ist之间的相对相位角,在谐振状态下,可以通过控制θc为+/-90°来控制功率流的方向。对vpi与vsi使用傅里叶级数展开可以表示为:

图4 ipt与ist相位差
(2)
(3)
当初级侧或接收侧的电压源使用短路代替时,可以用叠加定理计算出由vpi和vsi所提供的单个电流大小。在相量域中,初级侧与接收侧转换器所产生的电流分别为:
(4)
(5)
式中:Vpi(n)与Vsi(n)分别为转换器在基波和第n次谐波频率下所产生的相量域电压;Zp_in(n)与Zs_in(n)分别为从初级侧转换器到接收侧和从接收侧转换器到初级侧时电路所产生的等效阻抗;Zs_p(n)与Zp_s(n)分别为作用于Vsi(n)和Vpi(n)的等效阻抗。由图2所示,Zsi、Zsr、Zsrt、Zsrp、Zsrm、Zsrpt、Zsrc分别为虚线的右半部分电子元器件相对于vpi的等效阻抗,Zpi、Zpr、Zprt、Zprm、Zprs、Zprst、Zprc分别为虚线的左半部分电子元器件相对于vsi的等效阻抗,各阻抗分别为:
(6)
(7)
因此,阻抗Zs_p和Zp_s分别为:
(8)
使用Vpi、Vsi、Ipi和Isi来表示双向无线电能传输系统在给定操作条件下的功率流向,系统接收侧的视在功率为
(9)
式中,Ps和Qs为接收侧转换器所产生的有功功率和无功功率。将式(1)~(8)代入式(9)可得:
(10)
(11)
为了表示接收侧的功率流向,把功率相位角定义为
(12)
将式(1)~(11)代入式(12),则可以得到在给定条件下的功率相位角。当把功率相位角调节为0°或180°时,系统的无功功率为0。如果使用φp和φs来调节vpi与vsi的大小,则可以通过相对相位角的改变来补偿阻抗匹配网络,进而控制功率相位角:
θpower=f(θc,Zp_s,Zs_in,Zs_p,Zp_in)
(13)
将式(1)~(8)代入式(10)~(13)可得:
θpower=arccos[sin(θc)]
(14)
式(14)表示了系统在谐振状态下功率相位角与相对相位角之间的关系,+/-90°的相对相位角分别对应0°或180°的功率相位角。但是,当双向无线充电系统线圈之间未对准或者组件公差变化时,会使系统失谐,Ps、Qs也会随之变化,失谐后的双向无线充电系统无法继续以零Qs运行。这时我们需要调节系统的相对相位角θc的大小,使系统继续以零Qs运行,即调整系统的功率相位角θpower为0°或180°继续运行。
基于以上对系统谐振和失谐条件的数学分析,该系统需要设计一种控制相对相位角θc的控制器,进而使得接收侧的功率相位角保持在0°或180°,以确保系统在单位功率因数下以零Qs进行电能的双向传输。下面详细阐述基于有功功率Ps和无功功率Qs的控制器的设计方法,使系统能够在给定传输功率时相应调节φp和φs来控制相对相位角θc,进而使系统以零Qs进行电能的传输。
2 系统仿真分析
2.1 仿真原理及参数设置
首先,对接收侧的电压Vsi和电流Isi进行采样,相乘后可以得到实时的有功功率Ps,然后使用偏移90°后的Isi与电压Vsi相乘后得到实时的无功功率Qs,对测得的Ps、Qs取平均值后计算出系统的功率相位角θpower,并与0°进行比较。图5所示为新型控制器的工作原理图。由于接收侧的转换器必须与初级侧的转换器以相同频率工作才能够将功率从初级侧传递到接收侧,否则接收侧的功率将会发生振荡,使最终传递的功率为0[13],因此使用压控振荡器(voltage-controlled oscillator,VCO)来锁定接收侧转换器的频率。当控制器工作时,接收侧的转换器以初始VCO值启动,该频率可能与初级侧转换器的工作频率不同,此时系统会检测到振荡功率流,将所计算的接收侧功率相位角与0°进行比较后,差分通过比例积分(proportion integration,PI)控制器馈送到压控振荡器中,利用压控振荡器输出一个频率用来调节接收侧转换器所产生的电压矢量,进而进行功率的控制。
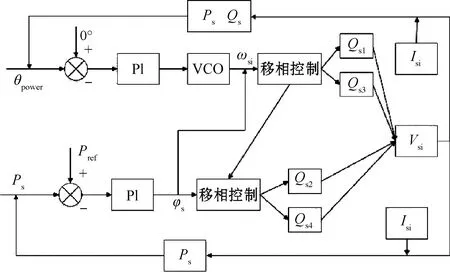
图5 新型控制器工作原理
从图5可以看出,通过改变Vsi的相位延迟可以改变系统的相对相位角θc。将测得的有功功率Ps与预期功率Pref进行比较之后的误差信号输入到独立的PI控制模块,可以得到用来调节传输功率量的φs,与VCO所输出的频率相互作用,共同调节接收侧转换器所产生的电压矢量。
在Simulink中对所提出的带有该新型控制器的双向无线充电系统仿真模型进行搭建,来验证该新型控制器的可行性。具体的仿真参数如表1所示。

表1 系统仿真参数
2.2 仿真实验验证
将系统调谐至85 kHz,LCL电路电感和电容值依据式(1)进行确定,当设定系统的传输功率为600 W时,仿真结果如图6和图7所示,分别为双向无线电能传输系统发射端与接收端转换器的开关仿真图。从图中可以看出,在系统的仿真过程中,双向无线电能传输系统的发射端Qp1桥臂与Qp4桥臂同时导通和关断,而Qp2桥臂与Qp3桥臂同时导通和关断,且两者互补导通,各自占空比均为50%,从而将直流电逆变为85 kHz的高频交流电,通过耦合机构传到接收端。反观无线电能传输系统的接收端,可以发现Qs1桥臂与Qs4桥臂不是同时导通和关断,他们之间发生了相位的改变;同时,Qs2桥臂与Qs3桥臂也不是同时导通和关断,他们之间也发生了相位的改变,且两者相位差值改变相同。这是因为在PI控制器的调控下,Qs2桥臂与Qs4桥臂的相位发生了后移,进而缩短了双向无线电能传输系统接收端转换器导通的总时间,从而进行输出功率的控制。但由于Qs1桥臂与Qs3桥臂为互补导通,Qs2桥臂与Qs4桥臂也为互补导通,因此,在双向无线电能传输系统的接收端不会发生短路情况。
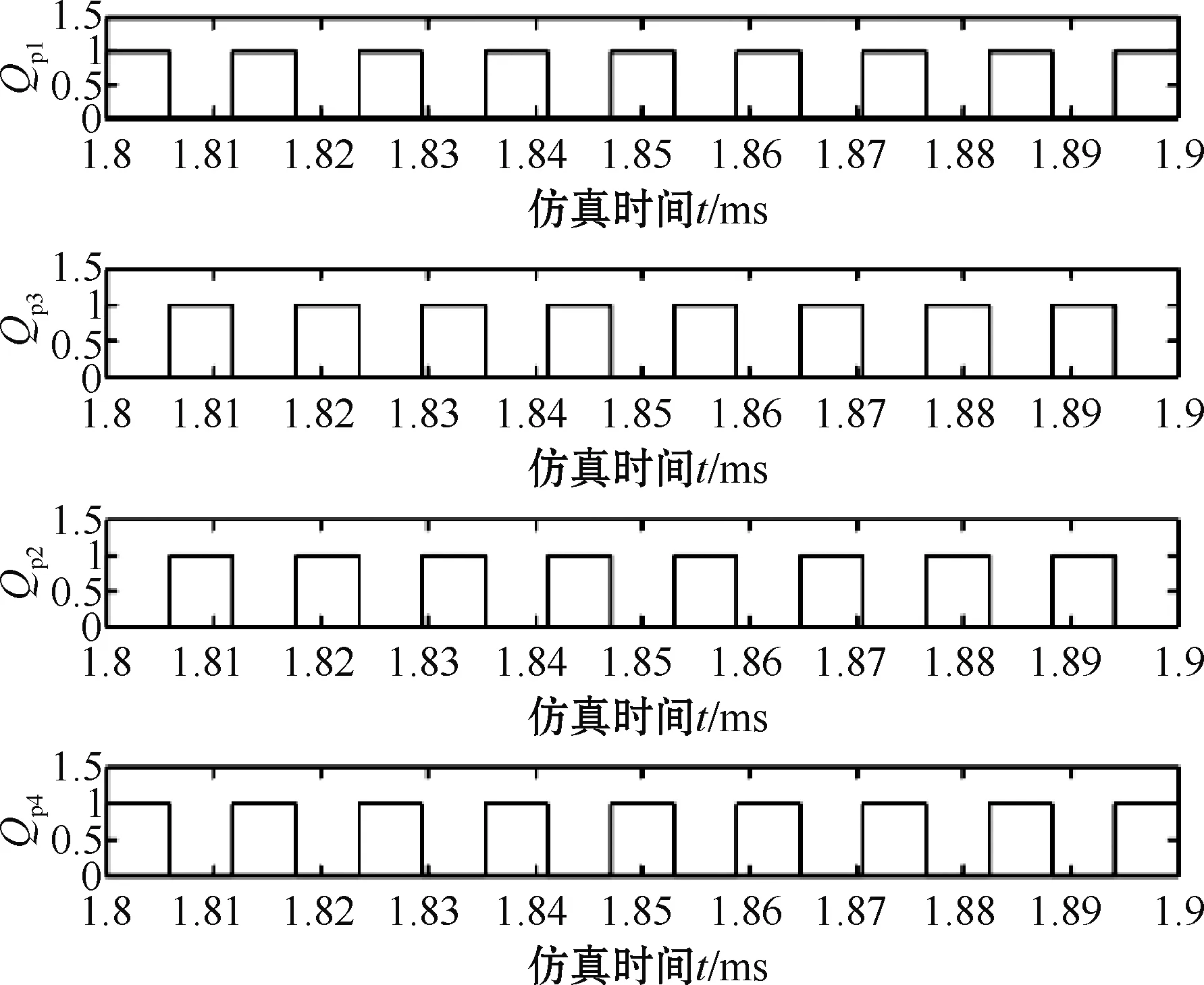
图6 发射端转换器开关仿真

图7 接收端转换器开关仿真
图8和图9分别为双向无线充电系统接收侧有功功率和无功功率仿真波形图,从图中可以看出,所设计的新型控制器能够使双向无线充电系统以预期的功率运行,且使得系统的无功功率为0。
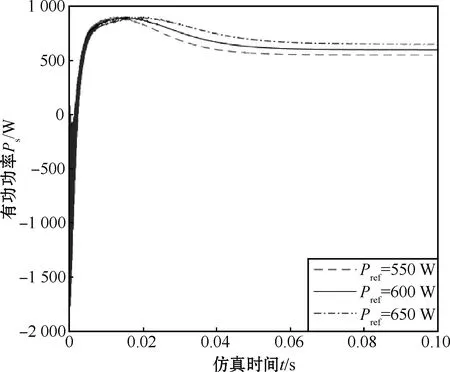
图8 接收侧Ps仿真波形
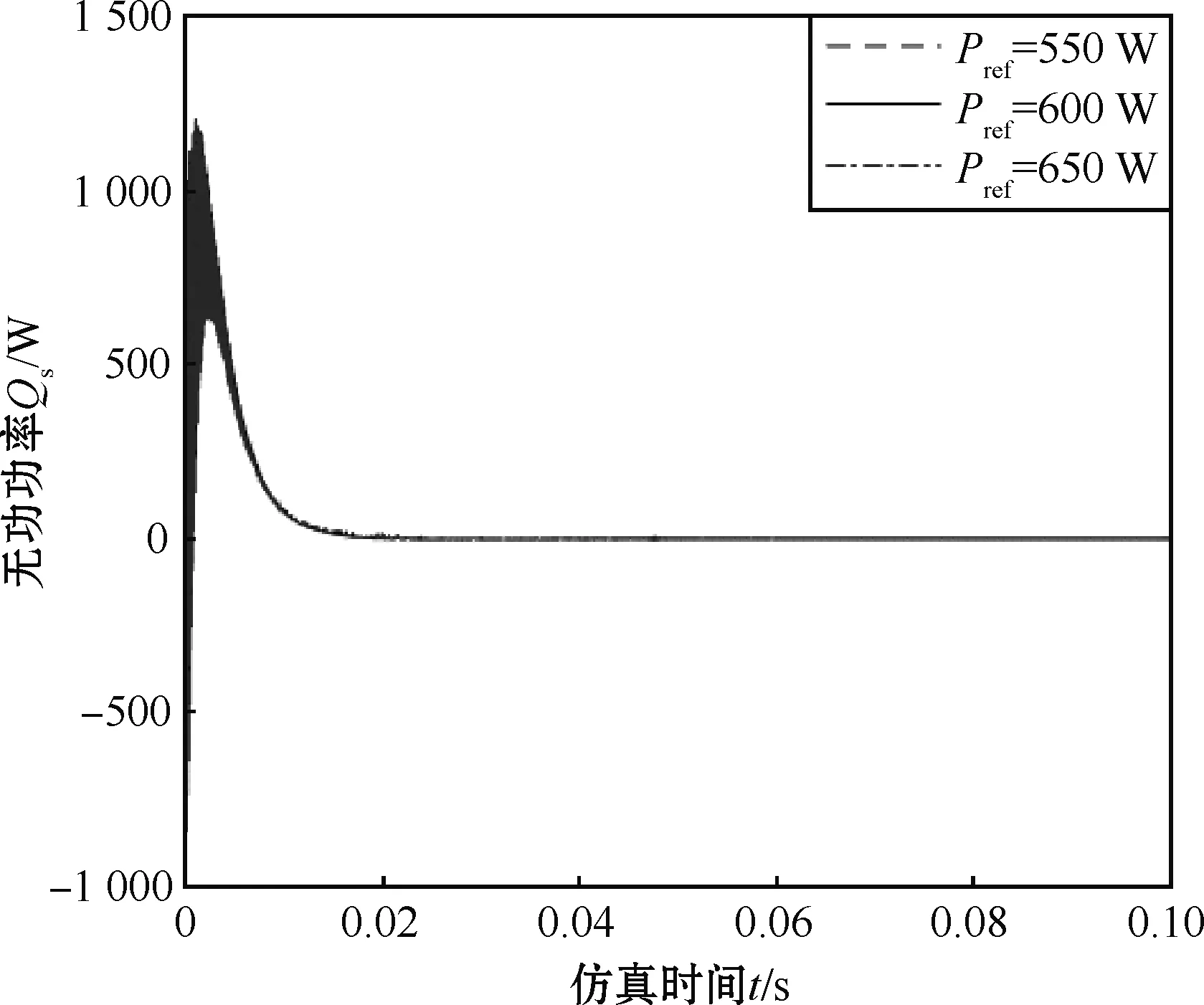
图9 接收侧Qs仿真波形
另外,根据前文分析,当组件存在公差时,电压Vpi和Vsi之间的相对相位角可能会受到谐振网络变化的影响。因此需要验证一下当系统失谐时的运行情况,把谐振电容Cpt的值从73.4 nF分别改变为63.4 nF和83.4 nF,仿真结果如图10和图11所示。从图中可以看出,当系统的参数改变导致谐振网络变化时,该新型控制器依然能够使双向无线充电系统以预期的功率运行,且系统的无功功率为0。
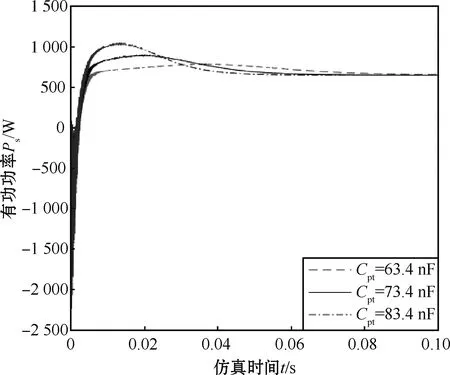
图10 Cpt改变时接收侧Ps仿真波形对比
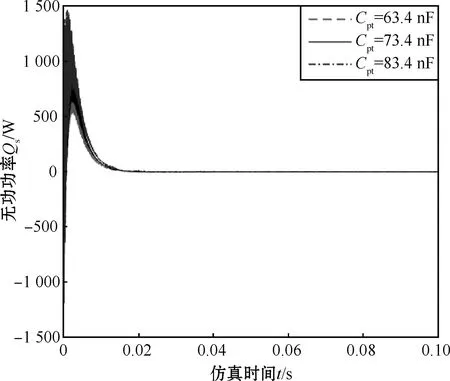
图11 Cpt改变时接收侧Qs仿真波形对比
虽然本文对新型控制器使用单边拾取系统进行了仿真,但对于具有多个接收侧的双向无线充电系统也依然可以同时实现能量的无线传递。当所提出的双向无线充电系统需要改变功率流的方向时,根据式(14),可以驱动接收侧的转换器产生一个领先于初级侧电压90°的电压来改变功率流的方向。
3 结束语
本文搭建了双向无线充电的传输模型,在接收侧增加了基于有功功率和无功功率的新型控制器,使得系统能够预先设定传输功率,并且在无功功率为0的情况下进行能量最大化传输;当系统失谐时该新型控制器也能够及时调整系统频率使系统的无功功率为0,并在预期的功率下稳定运行。该双向无线充电仿真模型的搭建,为以后研究非接触式双向DC/DC提供了借鉴,缩短了谐振式V2G技术的开发周期。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
汽车实用技术(2022年9期)2022-05-20
当代陕西(2022年4期)2022-04-19
科学与财富(2021年35期)2021-05-10
网络空间安全(2019年8期)2019-03-18
人大建设(2018年7期)2018-09-19
电机与控制学报(2018年9期)2018-05-14
卷宗(2017年1期)2017-03-17
