基于RGB-D相机和激光雷达的传感器数据融合算法
2022-03-26 09:16刘隆辉杨佳玉
湖南工程学院学报(自然科学版) 2022年1期
孙 健,刘隆辉,李 智,杨佳玉,申 奥
(湖南工程学院 电气与信息工程学院,湘潭 411104)
0 引言
传感器作为机器人环境感知的基础[1],主要分为非视觉器件和视觉器件.非视觉器件(如激光雷达、超声波或红外传感器)具有抗干扰能力强、可全天候工作的优点,但该类传感器不足之处是采集的数据单一,且价格昂贵;视觉器件(如单目相机、双目相机和RGB-D相机)虽然成本更低,信息更丰富,但受环境影响大,检测精度低,视野范围有限.因单一传感器数据无法满足机器人不同场景的应用需求,传感器数据融合技术应运而生,并成为当前机器人技术的研究焦点,如图1所示.
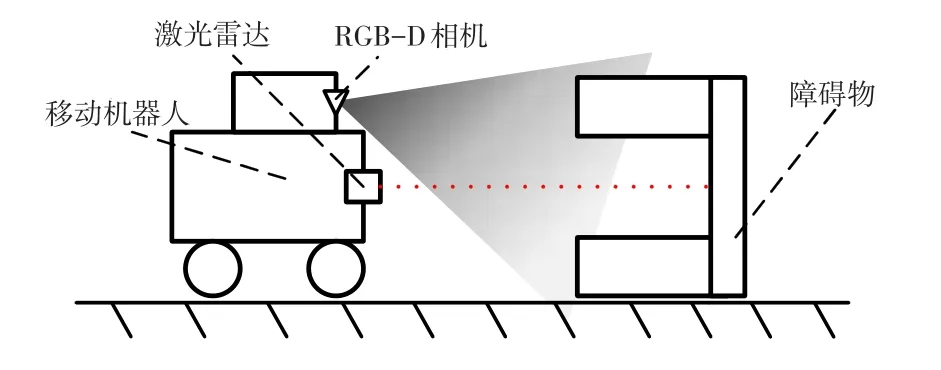
图1 视觉激光融合示意图
近年随着技术不断的迭代更新与积累,目前已有许多关于传感器数据融合算法的研究.文献[1]通过EKF算法,将激光雷达信息和深度相机信息融合,但因其只对固定高度范围内的像素进行转换,缩小了RGB-D相机的感知范围,不能根据机器人所处实际环境自适应剔除地面点云.文献[2]先获取RGB-D相机点云中的地面点云,剔除后进行投影,再通过ICP算法将RGB-D相机点云与激光雷达点云配准融合,但算法精度和时效性较低,导致两传感器之间的位姿关系不能实时准确更新,影响数据融合效果.
针对上述问题,本文在对RGB-D相机获取的点云数据优化之后,利用PL-ICP点云配准实现数据融合,然后基于扩展卡尔曼滤波(EKF)进行精确融合,进一步提高融合数据精准度.
1 传感器模型
为更好地研究传感器数据融合的过程,使算法更具客观性和可重复性,本文对核心器件激光雷达和RGB-D相机进行建模.
1.1 RGB-D相机模型
RGB-D相机是一种应用较广泛的视觉器件,不仅可获取环境的图像信息,还可直接获取环境对应点的深度信息[3],相比传统的双目相机依靠视差获取深度信息的方式,RGB-D相机大大地降低了计算的复杂度.
本文选用的RGB-D相机为Kinect v1[4],如图2所示,硬件结构主要包括外壳、底座、散热器、4个麦克风阵列、传动电动机以及3个摄像头从左到右分别为红外投影机、颜色摄像机、红外摄像机,表1是Kinect v1的主要参数.
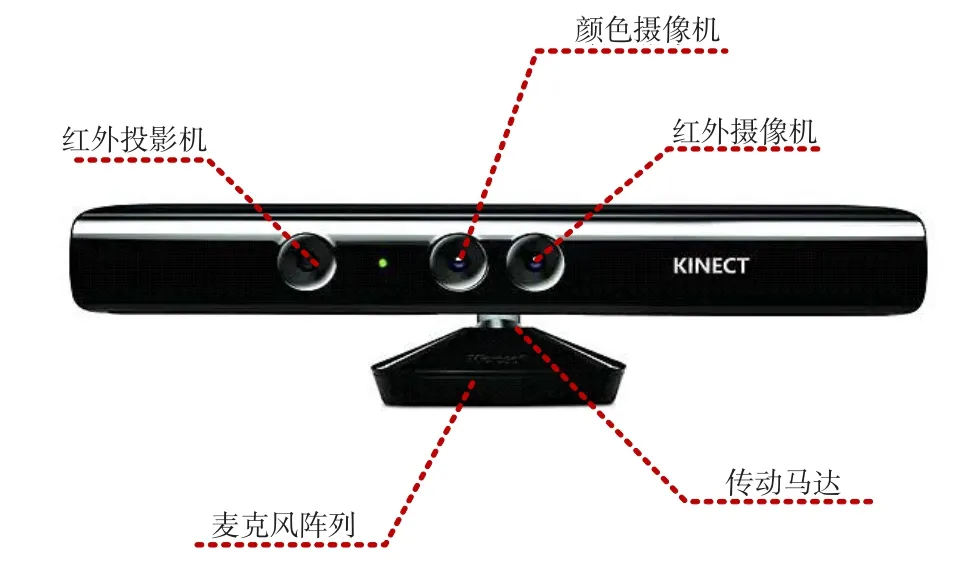
图2 Kinect v1的实物图

表1 Kinect v1主要参数
Kinect v1所获得的彩色图像和深度图像用点云来描述,其中每一个点均由r,g,b,x,y,z共6个分量分别表示该点的颜色与空间位置.
针孔相机模型如图3所示,对任意给定的一个深度图像点m()u,v,d,其对应的相机世界坐标点M(x,y,z),可通过下式进行转换:
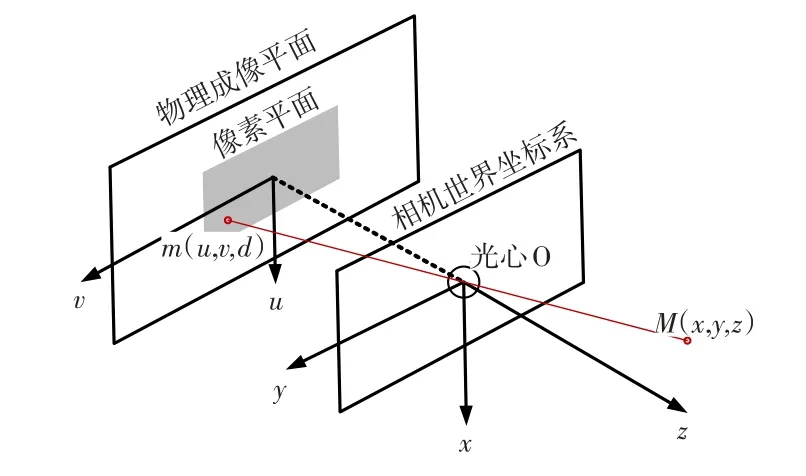
图3 针孔相机模型
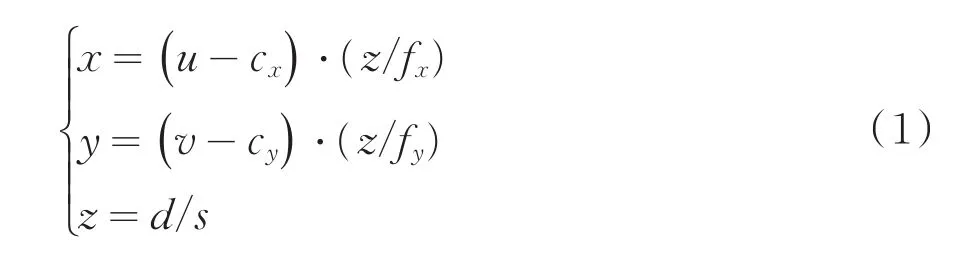
其中fx、fy为相机在x、y两个轴上的焦距,cx、cy为相机的光圈中心,s为深度图的缩放因子.
为获得更好的成像效果,在相机前安装了透镜,由于其对光线传播产生影响,相应的也影响了相机坐标系与像素平面的一一对应.为消除这种影响,需对畸变进行矫正.畸变可分为径向畸变和切向畸变,通常影响作用较大的为径向畸变,下面主要分析径向畸变的矫正.
径向畸变随着与中心距离的增加而增加,可以用以下多项式函数描述:

式中:[x,y]T为归一化平面的点的坐标,[xdt,ydt]T为畸变纠正后点的坐标.对于像素平面中的某点,可以通过这些畸变系数k1、k2、k3得到该点在相机坐标系上的正确坐标.
1.2 激光雷达模型
激光雷达能提供环境精确的测量信息,有较广的感知范围,是移动机器人环境感知和构建地图的核心器件之一[5].图4是本文所使用的激光雷达LS01B实物图,表2为其主要参数.

图4 LS01B实物图
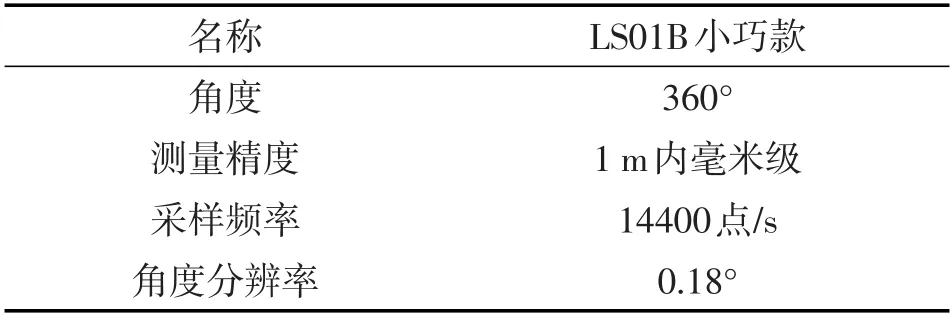
表2 LS01B主要参数
LS01B采用三角测量法来获取环境信息.三角测量原理如图5所示,激光器向外发射激光,线性CCD接收障碍物反射回来的光线,根据反射原理,物体在CCD上的成像与物体和雷达之间的距离相关,因此在CCD上能够显示不同距离的物体的反射光.而激光器和探测器之间有一定间隔,根据三角测量公式,能计算出被测物体的距离.
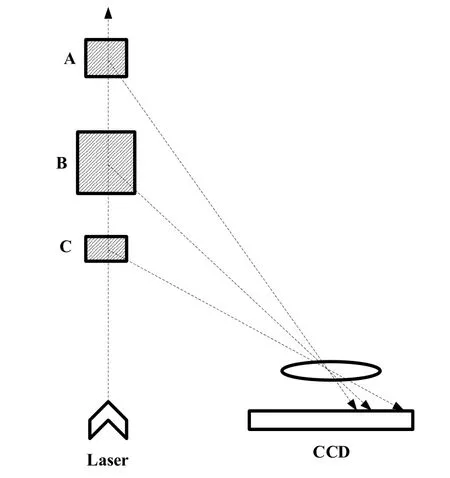
图5 三角测量原理示意图
如图6所示,激光雷达获取的激光束与YL轴正向夹角为α,激光雷达坐标原点到障碍物点的距离为r.则激光测距点二元组()α,r与障碍物坐标(xL,yL)有如下转换关系:
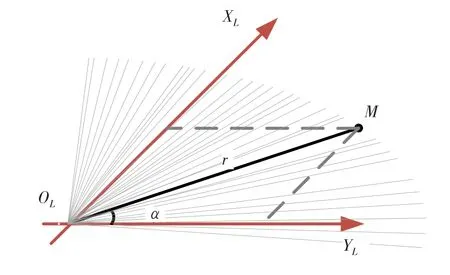
图6 测距二元组与障碍物坐标关系图

2 深度相机模拟激光数据
根据上述激光雷达和RGB-D相机的模型,两传感器获取的环境信息的表现形式和实际意义都不同.为实现视觉激光数据融合,本文的策略是先使用深度相机模拟激光数据,然后将模拟激光数据与激光传感器数据融合.
2.1 点云优化
RGB-D相机模型可将深度图像转换为点云,但RGB-D相机采集的点云数据中包含地面点云.地面点云不属于机器人建图时的障碍物信息,在点云投影时会作为障碍物引入,因此需将地面点云提取剔除.
本文针对随机抽样一致性算法[6](RANSAC)在地面起伏不平的复杂场景下提取地面点云不完整的缺点,先采用改进的RANSAC平面提取算法进行地面粗提取,而后利用法向量差分特征(DoN)[7]对剩余点云进行二次提取,达到提高地面点云提取完整的目的.具体步骤如下:
(1)原始点云数据利用体素化网格进行降采样滤波,在尽可能保持采样前后点云一致性的基础上,降低算法内存占用和提高算法时效性.
(2)计算地面点云数据法向量.
(3)估计地面点云平面方程,实现地面点云的粗提取.
由地面法向量计算地面的拟合方程:

利用RANSAC算法随机选择数据点并计算该点所在的平面方程π(A,B,C,D),计算点云数据中每个点到该平面的距离,利用距离阈值dmax统计出该阈值内的点数Nin.重复随机采样更新平面方程,最终选择点数最多的平面方程所对应的点构成集合,利用该集合最小化距离函数,求得最优地面平面方程:

其中Dk表示集合中第k个点 到地面平面的距离.
(4)对剩余点云法向量计算差分特征(DoN),二次提取地面点云.
对于点云中的每一点q,在不同邻域r1,r2(r1>r2)进行法向量估计,得到两个单位法向量n(q,r1),n(q,r2),向量间的夹角设为θ,定义法向量差分算子如下:

(5)对地面点云平面进行合并.
2.2 点云投影
剔除地面点云后的障碍物点云为Mi()xi,yi,zi,要实现对激光数据的模拟,需先将障碍物三维点云对地面进行投影,得到二维点云mi()θi,di,然后将Kinect v1每条视线上距离光心O最近的点提取出来,便形成了一束模拟激光,如图7所示.具体步骤如下:
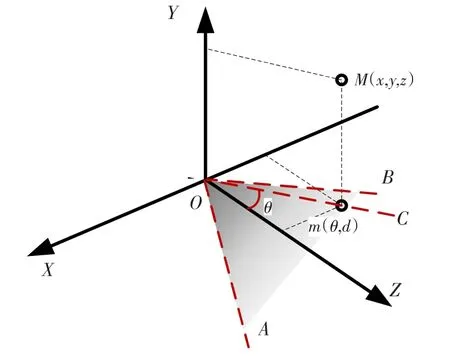
图7 Kinect v1模拟激光原理图
(1)障碍物三维点云Mi()xi,yi,zi对地面进行投影得到二维点云mi()θi,di,其中:

(2)若Kinect相机观测角范围为()βmin,βmax,激光束共细分为N份.假设m()θ,d点为OC视线上距离光心O最近的点,那么,点m()θ,d在数组laser中的索引值为:

(3)数组laser[n]表示模拟激光数据,若某视线上产生模拟激光序号是n,该视线上激光点距离值为d[θ],那么形成的模拟激光为:

3 视觉激光数据融合
单一传感器无法提供完整的环境测量数据,需要用到传感器融合技术.使用多个传感器提供冗余信息,可以减少测量误差.从相机和激光传感器获取传感器数据,通过传感器融合技术,可以将两个传感器用特定的方式结合起来,实现优势互补.本文首先对两组传感器数据进行点云配准实现粗融合,然后通过扩展卡尔曼滤波将两组激光数据进行精确融合.
3.1 点云配准
移动机器人系统上多传感器拥有多个坐标系,算法需要将多个传感器的数据统一到同一个基准坐标系进行对齐.对已获取的两束激光数据,通过对激光雷达的点云数据和深度相机的图像点云数据进行配准,实现数据的坐标系对齐,达到数据粗融合的目的.
图8所示为同一时刻分别处于激光雷达坐标系(OL,XL,YL,ZL)与Kinect v1相机坐标系(OK,XK,YK,ZK)中的点M,其坐标分别为(xL,yL,zL)和(xK,yK,zK),根据激光雷达坐标系与相机坐标系的位姿关系,得到坐标转换关系为:
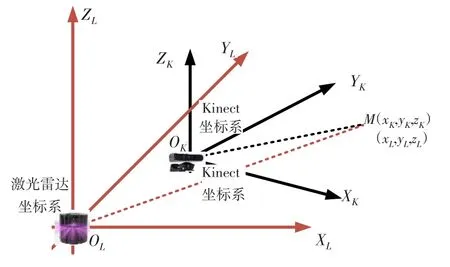
图8 坐标系位置关系示意图
式中,R是旋转矩阵;T是平移矩阵.
如图9(a)可知,激光点是对实际环境中曲面的离散采样,激光点到实际曲面的距离是最优的误差尺度.常用的点云配准算法经典迭代最邻近(Iterative Closest Point,ICP)算法[8],如图9(b)所示,将点到点的距离,作为误差构建误差方程,容易造成误匹配,增加迭代时间.本文采用改进的PL-ICP(Point-to-Line)算法[9],通过用点到其最近两点连线的距离代替点到点的距离,如图9(c)所示,构建误差方程,有利于缩减迭代时间,增加算法时效性.
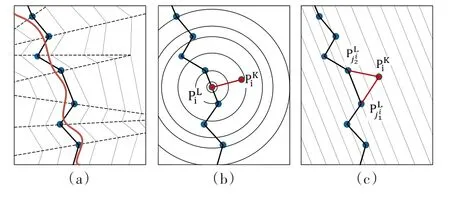
图9 PL-ICP原理图
深度相机模拟的点云和对应的激光雷达点云空间坐标集合分别为:

算法的具体步骤为:
(1)给定一个初始的转换矩阵Qk=()Rk,Tk,将当前模拟点云的数据转换到激光雷达坐标系下,转换方式为:

后面迭代计算所需的数据由上一次算法迭代计算得到.
(3)计算误差并去除误差过大的点.
(4)构建最小化误差方程:

其中ni表示线的法向量.
(5)求解出位姿转换矩阵Qk+1,将其用于下次迭代计算.
3.2 传感器数据融合
在点云配准得到两个传感器之间的位姿关系后,可将两束激光转换到同一坐标系下进行数据精确融合.该过程常用滤波思想的方法实现,针对经典传感器滤波算法Kalman滤波[10]只局限用于系统线性、噪声为高斯理想场景的不足,本文采用基于其演变的扩展卡尔曼滤波[11](EKF),在粗融合的基础上进行精细融合.
系统的状态转移方程以及传感器的观测方程分别为:
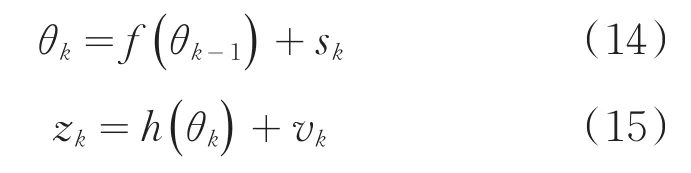
θk为估计值,zk为传感器的观测值,状态转移噪声向量sk一般是服从多维高斯分布的,其协方差矩阵为Q;观测噪声向量vk一般也是服从多维高斯分布的,其协方差矩阵是R.
利用泰勒展开式对(13)式在一次估计值θk-1处展开得:

利用泰勒展开式对(14)式在一次估计值θ′k处展开得:

其中,Fk-1和Hk分别表示f(θk-1)和h(θk)在θk-1和处的雅克比矩阵.
EKF分为预测和更新两步:
预测:
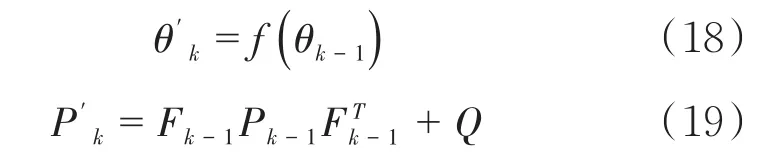
其中为预测值,为预测值与真实值的协方差.
更新:
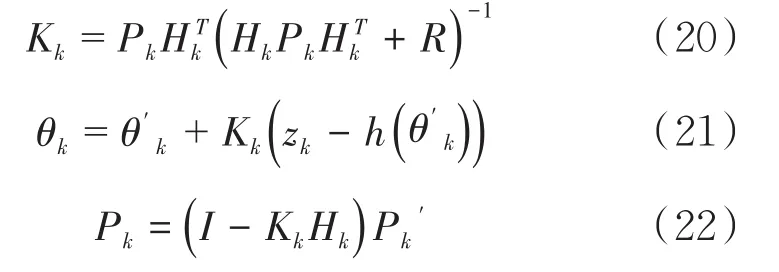
其中Kk为卡尔曼增益,θk为估计值,zk为观测值,Pk为估计值与真实值之间的协方差.
如图11所示,具体融合过程为:
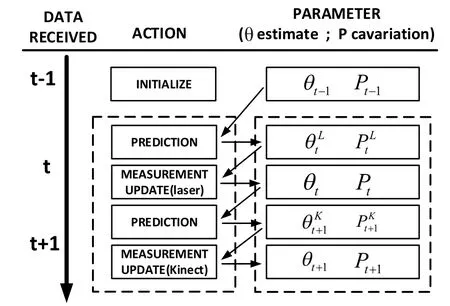
图10 融合算法示意图
(1)在t时收到激光雷达数据时,根据t-1时刻的估计值θt-1和协方差Pt-1,利用公式(17)、(18)完成一次预测得到预测值和协方差.
(2)再根据t时刻的激光雷达的观测数据、预测值和协方差,利用公式(19)、(20)、(21)实现测量值更新得到t时刻的状态θt和协方差Pt.
(3)在t+1时刻收到Kinect v1模拟激光数据时,根据t时刻的状态θt和协方差Pt完成一次预测得到预测值和协方差
(4)同理,根据t+1时刻的Kinect v1模拟激光的观测数据、预测值和协方差,实现测量值更新得到t+1时刻的估计值θt+1和协方差Pt+1用于下一次迭代.
4 实验与分析
实验平台如图11所示基于Aimibot教育机器人,硬件包括NUC机载电脑、高清显示器、激光雷达LS01B、RGB-D相机Kinect v1等,其中机载电脑搭载基于Linux(Ubuntu16.04)系统的ROS(Robot Operating System)操作系统.

图11 实验平台
综合考虑实验室的条件以及实验平台的局限性,为验证视觉激光融合建图算法在复杂环境下的建图准确性与可靠性,设置如图12所示的实验场景.场景面积为8 m×5 m,主要包括三种不同障碍物,分别为组合体A、镂空的凳子B、小木块C.
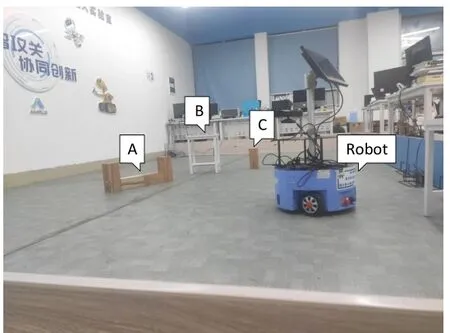
图12 实验场景
场景中长方体木块的宽为10 cm,而实验平台的单线激光雷达离地的高度为15 cm,因而场景中的一部分障碍物不在单线激光雷达的扫描平面.三种障碍物依次排开,与机器人形成的夹角为60°,而Kinect v1深度相机的视角为57°×43°,因此机器人无法感知到所有障碍物,如图13所示.
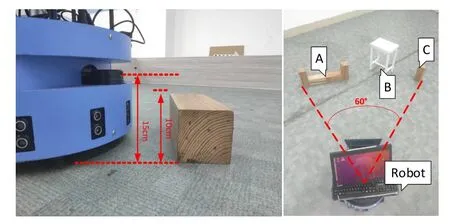
图13 机器人与障碍物相关位置关系
实验主要是对比采用不同传感器数据建图的结果,以验证本文算法的可行性和有效性.
如图14为单个二维激光雷达的建图结果,该结果表明二维激光雷达无法感知非激光扫描平面障碍物信息,对场景中障碍物的感知情况为:组合体A中比激光雷达位置低的部分和镂空凳子B与激光雷达不在同一平面的部分均出现信息缺失.此地图在机器人导航时会使其产生错误的路径规划.
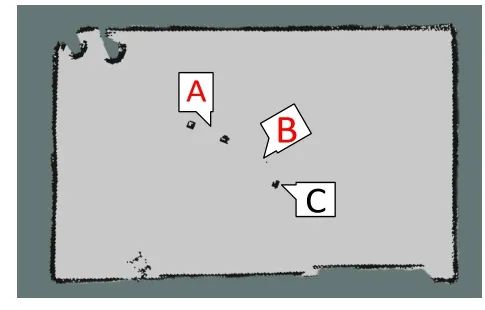
图14 二维激光数据建图结果
文献[1]采用的视觉激光融合算法,在进行RGB-D相机模拟激光数据时,处理地面点云时仅对深度图像固定高度范围内像素进行转换,缩小了RGB-D相机的感知范围,不能根据机器人所处实际环境自适应剔除地面点云.因而机器人在移动建图过程中对同一障碍物不能连续观测,导致部分障碍物信息缺失,如图15所示障碍物均出现缺损.
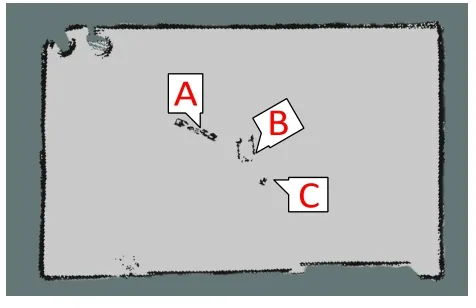
图15 文献[1]融合方法建图结果
文献[2]采用的传统ICP算法进行点云配准,算法精度和时效性较低,导致两传感器之间的位姿关系不能实时准确更新,使得融合过程数据参考坐标系不统一,最终融合结果出现重影,如图16所示,建图精度降低,无法准确还原障碍物的信息.
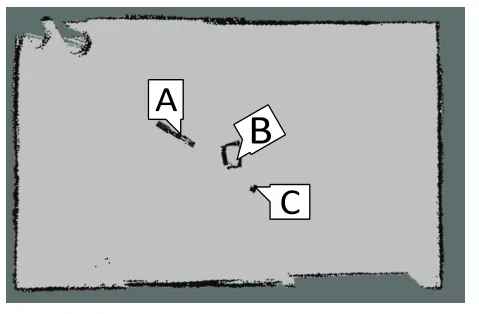
图17 本文融合方法建图结果
图7为本文视觉激光融合数据建图结果,对比单个二维激光雷达数据和文献[1][2]融合方法数据建图结果,很好地还原了场景的障碍物信息,建图的完整度大大提高,包含了更为丰富的环境信息,同时也保证了建图的精度.
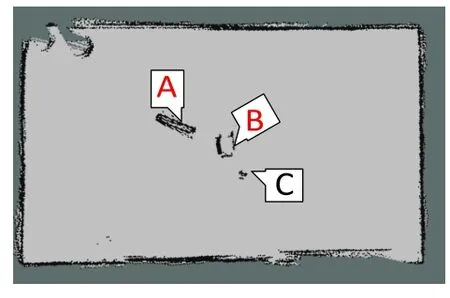
图16 文献[2]融合方法建图结果
通过该实验的对比可以看出,融合多传感器数据能够有效弥补单一传感器的不足,实现对环境的更精确、更完整的感知.利用此融合算法可以实现机器人在复杂环境下的精确定位和导航.
5 结语
本文分析了当前移动机器人环境感知传感器的优缺点,针对当前一些传感器融合方案的不足,提出一种改进RGB-D相机和激光雷达数据融合的算法.利用融合后的数据进行建图,并对比单个传感器数据和已有传感器融合方案的建图结果,本文的融合算法在保证了传感器数据精度的基础上,实现了对环境信息更全面的感知.这对提高移动机器人建图完整度和精准度有重要意义.
猜你喜欢
北京测绘(2022年5期)2022-11-22
交通信息与安全(2022年1期)2022-03-20
汽车工程师(2021年12期)2022-01-17
汽车观察(2021年8期)2021-09-01
电子制作(2019年10期)2019-06-17
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
雷达学报(2017年3期)2018-01-19
自动化学报(2017年4期)2017-06-15
华东师范大学学报(自然科学版)(2017年1期)2017-02-27