基于改进下垂控制的并联微源功率分配控制策略研究
2022-03-26 09:16王培杰唐勇奇林国汉贺书航
湖南工程学院学报(自然科学版) 2022年1期
王培杰,唐勇奇,林国汉,贺书航,熊 伟
(湖南工程学院 电气与信息工程学院,湘潭 411104)
随着人们对环境友好和可持续清洁能源的需求,世界各地的人们越来越关注可再生能源.电力系统经历了从集中式发电到分布式发电的范式转变.近年来,微电网技术的发展促进了分布式可再生发电的集成.如配电网络中的风力发电、储能系统和光伏发电[1],这些分布式电源通过电力电子装置接入电网,带来清洁能源的同时也给微网系统的可靠运行带来了挑战[2-3].微电网有两种运行模式:并网和孤岛.当微网运行在孤岛模式时,分布式微源承担着电能质量调节的任务.逆变器作为分布式电源与微电网的接口,其控制技术已成为分布式电源领域的新研究热点之一[4].自使用同步发电机以来,下垂控制便成为电力系统中广泛应用的成熟技术,尤其在并联逆变器中被大量使用,应用于逆变器的下垂控制是通过模拟传统电力系统中同步发电机下垂特性对逆变器实施控制的一种方法,可以根据自身的下垂特性调整功率输出,实现功率在多逆变器之间的分配,但是其固有缺陷会导致系统电压和频率的偏差;而且,当各逆变器到负荷的线路阻抗不相等时,分布式微源之间的精确无功功率分配不容易实现,此时,采用传统下垂控制策略,分布式电源之间存在环流,增加了损耗,占用了分布式电源的容量,影响了整个系统的稳定性.因此,为了应对上述挑战,解决传统下垂控制使用中的固有缺陷,国内外学者在此基础上提出了多种下垂控制改进方案.
文献[5]提出在控制系统中引入虚拟阻抗的解耦下垂控制策略,通过引入虚拟阻抗,改变系统输电线路的阻感性,使得逆变器输出阻抗为纯感性,以达到系统在低压配电网络中呈阻抗性环境下的稳定,实现功率的合理分配,但虚拟阻抗值的参数在求解过程中对数值计算误差很敏感,容易使系统输出等效阻抗不稳定.文献[6]提出一种自适应下垂系数功率分配控制策略.通过将额定负载功率与实际负载功率的差值引入奇次函数中,以不断调整下垂系数的值,实现功率的精确分配,但是该方法数学计算过程复杂,且没有考虑输出电压偏差的问题.文献[7]提出了一种自适应虚拟阻抗优化设计,旨在实现最小化功率损耗,减小电压降,但这种方法需要不断修改参数,而且不考虑局部负载的影响,无法将母线电压维持在额定值.
综上所述,针对下垂控制策略的改进,多数方案较为复杂,难以应用到工程方案中,为此,本文在传统下垂控制策略的基础上,针对并联逆变器孤岛运行时频率越限且无功功率不能均分的问题,提出了一种改进的自适应下垂控制策略,即在传统的P-f、Q-U下垂曲线的控制方程中,增加有功、无功偏差补偿环节和电压补偿环节,使得P-f、Q-U的下垂系数可根据并联逆变器有功-无功出力的精度自动调整,最终各个逆变器的有功-无功出力趋于一致,电压和频率维持稳定;并且在Matlalb/Simulink中建立了仿真模型,通过仿真结果,验证了所提控制策略的有效性.
1 微电网的结构和下垂控制策略
1.1 微电网的结构
微电网的典型配置如图1所示[8].它由多个分布式发电(DG)单元、存储系统和负荷组成.微电网通过公共耦合点的静态转换开关(STS)连接到公共电网.每个分布式发电单元通过电压源逆变器(VSI)和LC滤波器连接到微电网.本文用直流源来代替分布式发电和存储系统,以简化研究.微电网和大电网的状态由静态转换开关控制,使微电网工作在孤岛模式和并网模式,并保证模式间的无缝切换.当处于并网模式时,微电网的电压和频率的参考值都由主电网来提供,逆变器只要跟随这个电压基准值便可.并且,各DG单元发出的有功和无功通过简单的PI调节就能实现均分.因此,微电网在并网模式下的功率均分技术已比较成熟.当处于孤岛模式时,微电网失去了外部电网提供的电压频率参考,所以需要某个逆变器为整个微电网提供电压频率参考.
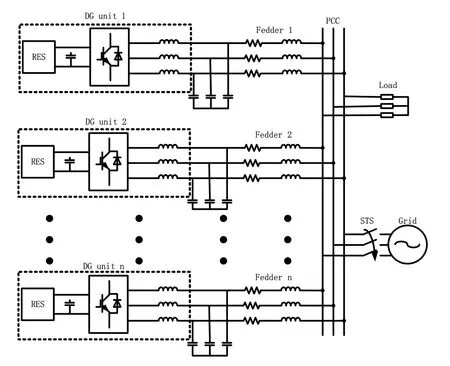
图1 微电网结构
1.2 系统功率输送原理及传统下垂控制
两台分布式微源通过逆变器接口并联结构如图2所示[9].图中,E1∠δ1、E2∠δ2为逆变器Vr1、Vr2的参考电压,其中,δ为供电电源与终端之间的相位差,即功角.两台逆变器通过线路阻抗为Z0∠θ的馈线连接到公共负载Z,其电压参考值为υ0∠0°.
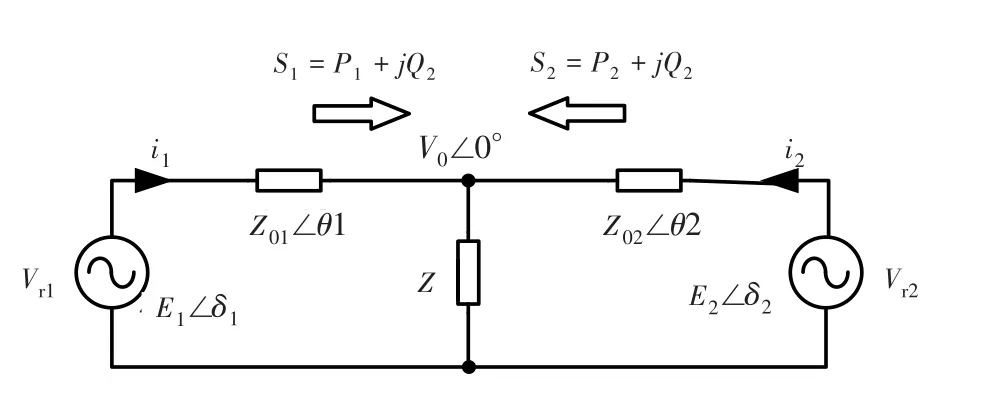
图2 并联运行的逆变器结构
电压源υr通过阻抗Z0∠θ向另一个电压源υ0∠0°传输的有功功率和无功功率分别为:
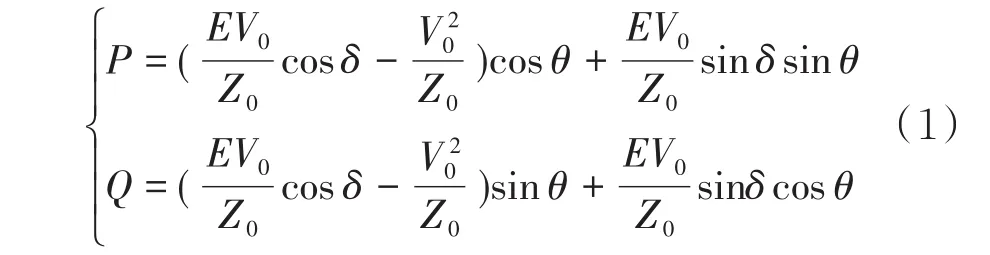
在实际应用中,功角δ≈0°,且当逆变器输出阻抗为感性时,θ=90°,则式(1)的公式可以简化为[10]:
从式(2)可以看出逆变器输出的有功功率与电压相角成正比,无功功率与电压幅值成正比,为了确保Q-E环和P-ω环都构成负反馈,以便下垂控制能够分别调节电压和频率,进而得出了传统下垂控制的表达式:
E*和ω*是逆变器空载时输出的电压和频率,Ui和ωi是逆变器在带负载情况下输出的电压和频率,是逆变器的额定参考有功和无功功率,mi和ni是频率和电压下垂曲线的下垂系数(斜率的相反数).
由图3可知,额定频率对应的额定输出功率为:
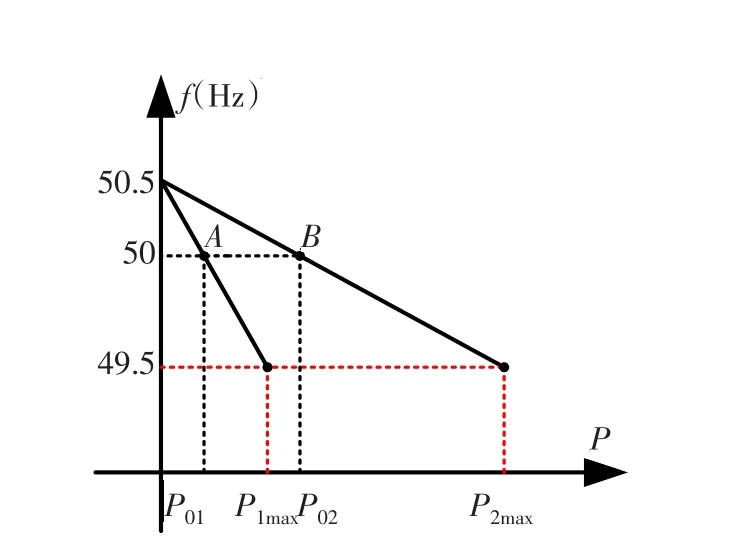
图3 P-f下垂曲线

若此时逆变器的实际输出功率为P,则输出的有功功率偏差可表示为:

则P-f下垂曲线的下垂增益mi可通过功率差值的积分环节表示为:

式中ki为有功偏差的积分增益,理想情况下,稳态时有功偏差的积分项将为零,mt+1=mt,故改进策略在下垂系数变化的过程中,通过有功偏差不断调整下垂系数大小,直到逆变器的预期功率值与实际输出功率值相等,即P=P0,达到稳态.
将式(3)代入式(2)中得到无功功率的表达式:

由式(7)可知,逆变器输出的无功功率与空载电压幅值、线路等效电抗、下垂系数和公共母线电压有关.这些因素都可能造成并联系统产生无功环流,降低微源的均流特性和微电网系统稳定性.
由式(3)和式(7)可得由馈线阻抗表示的逆变器输出电压和无功功率的表达式为:

从而根据式(3)和式(8)可得到逆变器输出功率特性与下垂曲线图,如图4所示,以两个容量相同的DG为例,假设两台微源的无功下垂增益相等,线路阻抗不同,当不匹配的馈线阻抗X1>X2时,DG1输出的无功功率小于DG2输出的无功功率.当增大下垂增益时,无功分配的偏差将变小,但无功偏差仍然存在,且会导致电压下降,甚至影响微电网系统的稳定性.
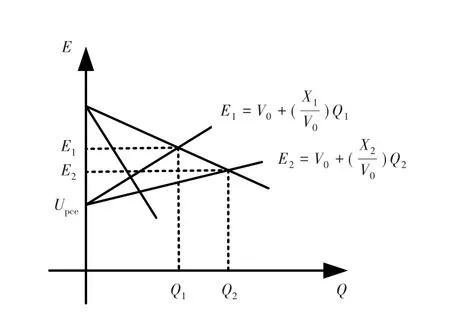
图4 不同线路阻抗引起的无功功率分布变化
2 改进的下垂控制策略
2.1 有功-频率控制器设计
因为频率为系统的全局变量,所以有功功率可以保证按容量比分配,通过将有功-频率控制的下垂增益减小,可以减小稳态频率与其额定值的偏差,提高系统频率质量.但当下垂增益太小时,系统的动态响应速度太慢,因此通过在P-f曲线的下垂增益中增加功率偏差的积分项来不断调整下垂增益,使得系统的频率与额定频率相等,逆变器的输出功率与预期功率值相等.改进后的下垂控制方程式为:

改进的有功-频率控制框图如图5所示.
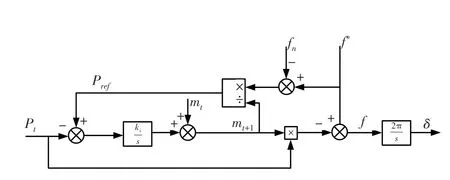
图5 改进有功-频率控制框图
当系统稳定运行时,系统的频率一致,由式(3)可知:

根据式(10)为了让逆变器按容量成比例地分配负载,逆变器的下垂系数应满足:

根据式(6)和式(11)可得:

式中,m01,m02为初始状态的下垂系数,ki1,ki2为积分增益.
根据式(12)可知,只要控制以下关系成立.
则可以在实现无频差的同时保证功率在不同容量逆变器之间按容量成比例分配负载.
2.2 无功-电压控制器设计
根据前面的分析,逆变器的输出有功功率实现均分的条件是频率为全局变量.因此,有功功率输出不受等效阻抗的影响.根据式(7)可知:

由式(15)可知,逆变器输出的无功功率主要与逆变器到负载的馈线电抗有关,且还会受到下垂系数和本地负载的影响.因此在无功精确分配的过程中,必须保持以下等式成立.
由式(16)可知,必须保持各个逆变器的馈线电抗成比例.但这一条件在工程实践中很难实现.所以为了提高配电精度和适应复杂的微电网结构,提出了一种自适应调节下垂系数的控制方法,改进的无功-电压控制框图如图6所示.
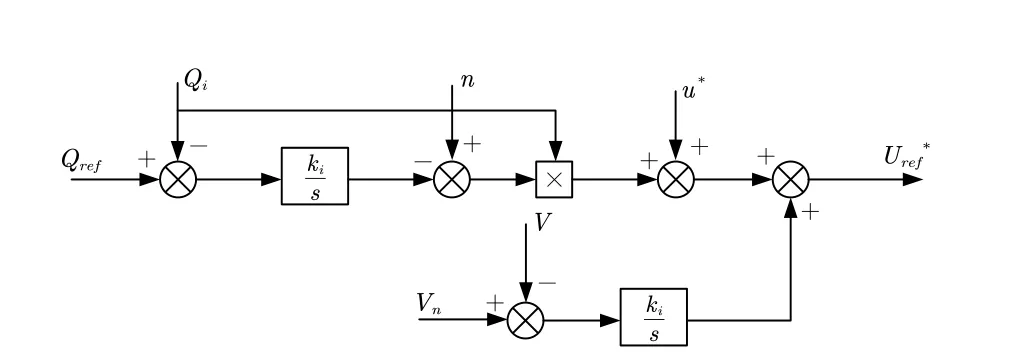
图6 改进无功-电压控制框图
改进后的下垂控制方程为:

其中Qref是计算的无功功率参考值.
当每个逆变器的容量相等时,

当每个逆变器的容量不相等时,
其中,Si是逆变器的额定容量,QL是系统所接负荷的总无功功率.
3 仿真验证
为了验证改进的下垂控制方法对分布式发电机组间反应功率分配的准确性,在Matlab/Simulink环境下对图7所示的微电网、传统下垂控制策略[11]和本文所提出的改进下垂控制策略进行了仿真.
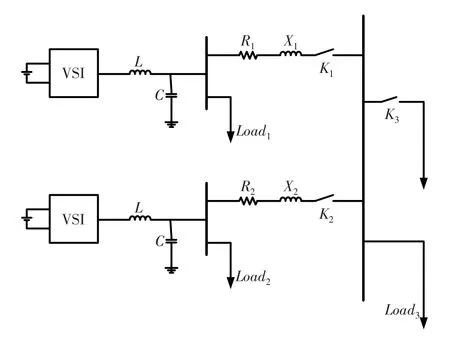
图7 微电网结构
系统在两逆变器容量比为2∶3,阻抗比为1∶2的条件下进行验证.即馈线线路阻抗分别为Z1=(0.428+j0.00008)Ω和Z2=(0.856+j0.000176)Ω,并联系统的负荷分别是load1=load2=(20000+j5000)VA,load3=load4=(10000+j10000)VA,通过仿真对传统下垂控制与本文所提出的改进下垂控制策略进行了对比分析.
具体的可调逆变器主电路的仿真参数如表1所示.
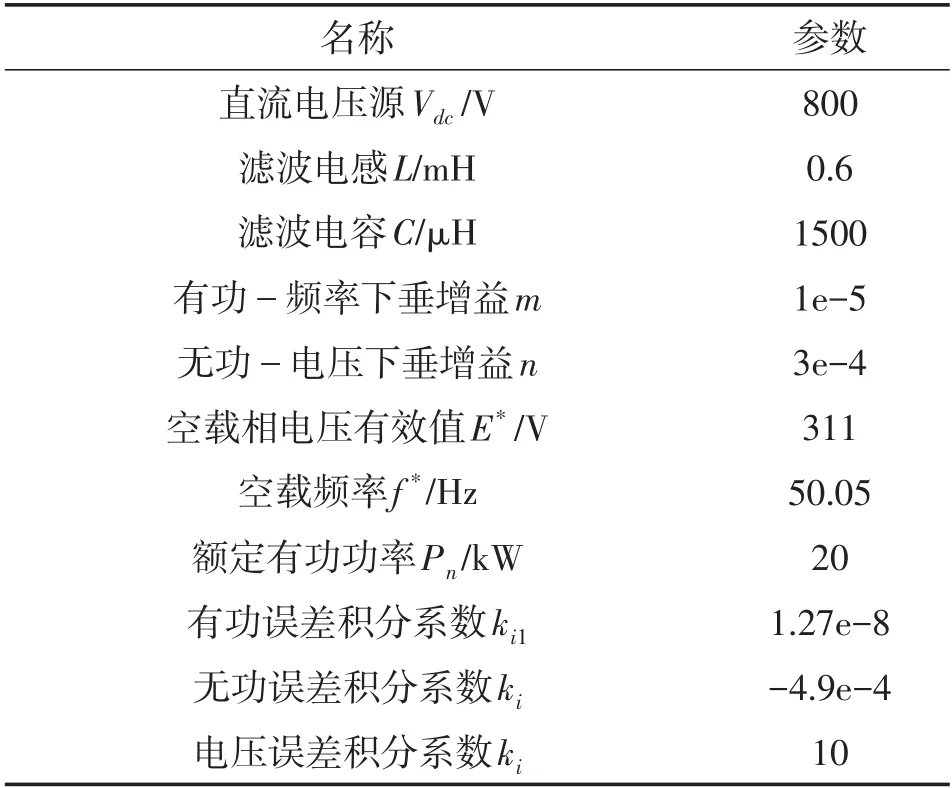
表1 改进下垂控制仿真参数
3.1 传统控制策略仿真分析
采用传统下垂控制策略时,根据式(11)和式(16)将两个逆变器的有功-频率的下垂增益和无功-电压的下垂增益和有功功率和无功功率按3∶2进行的配置.t=0~1 s时,并联逆变器带公共负荷load3运行,在1 s时,闭合K3,增加负荷load4.仿真结果如图8所示.
图8(a)、图8(b)为逆变器输出的有功功率、无功功率,从图中可以看出在逆变器容量不同和线路阻抗不一致时,采用传统下垂控制策略的逆变器输出的有功功率满足P1∶P2=3∶2的关系,但无功功率Q不满足此比例关系,存在明显的分配偏差.由图8(c)、图8(d)可知,在t=1 s负荷突增后,PCC处电压与频率均降低,偏离了额定值,且不能自行恢复.
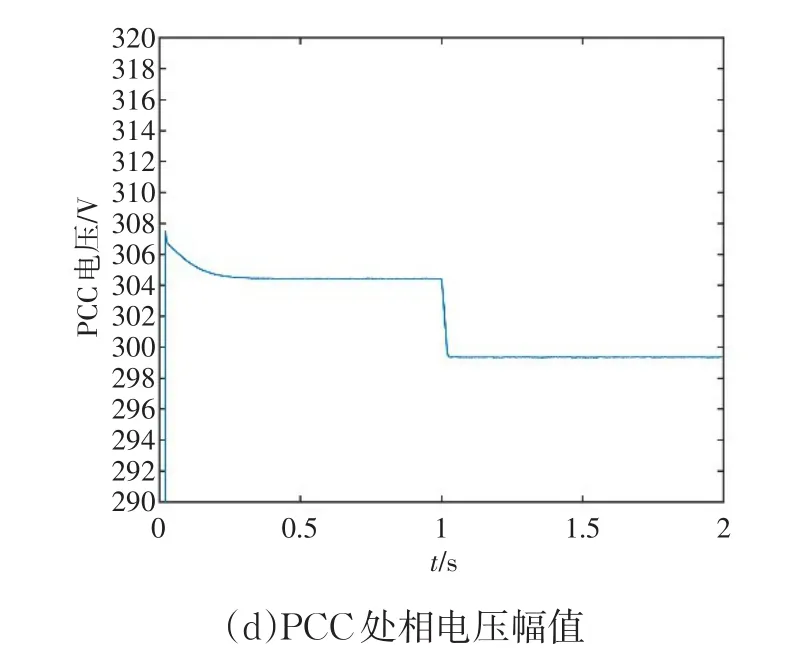
图8 传统控制策略仿真结果
3.2 改进型控制策略仿真分析
采用改进的下垂控制策略时,并联系统的公共负荷为10 kW、10 kVar,在t=1 s时,突增10 kW、10 kVar的负荷,其中.其他控制参数与采用传统控制策略时相同,不再具体写出,仿真结果如图9所示.
图9(a)、图9(b)为逆变器输出的有功功率、无功功率,从图中可以看出在逆变器容量不同和线路阻抗不一致时,采用改进型下垂控制策略的逆变器输出的有功功率比例为P1∶P2=3∶2,无功功率比例为Q1∶Q2=3∶2,且在t=1 s负荷徒增时,有功-无功功率均能按3∶2的比例进行精确分配,且具有很好的动态性能.
由图9(c)、图9(d)可知,在t=1 s前,PCC处电压与系统频率均与额定值相等,稳定在50 Hz和311 V.且在t=1 s负荷突增后,逆变器的电压与频率的跌落幅度均在允许的范围内,经过短暂延时后均能快速地恢复到额定值,具有非常好的自愈能力.

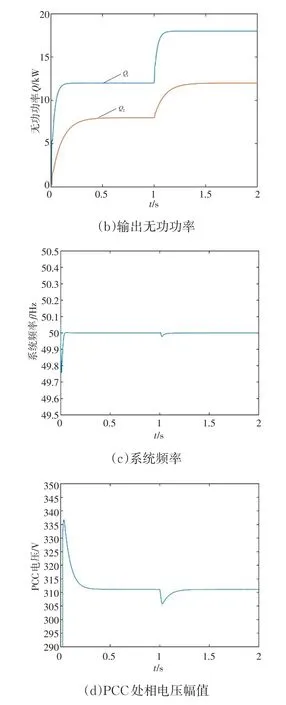
图9 改进型控制策略仿真结果
从以上仿真结果可以看出,当线路阻抗和逆变器容量不相等时,采用传统下垂控制,有功功率可以实现按比例分配,但无功功率分配不均衡.系统的电压和频率在t=1 s负荷突增后,均减小且与额定值相差较大,不具有自愈的能力.采用本文提出的改进型下垂控制策略后,可以在没有传感器和未检测线路阻抗的情况下有效改善分布式电源之间的有功-无功功率分配,完成精确的按比例分配,且具有频率和电压的自愈能力,动态响应快.
4 结论
本文以逆变器等效输出阻抗呈感性为例,针对各逆变器并联运行在孤岛模式下,当馈线阻抗不同,各逆变器容量不同时,负荷突增引起各逆变器输出功率不稳定,进而导致PCC处的电压和频率不稳定问题,提出了一种改进型控制策略,通过引入有功-无功补偿环节,实现了各逆变器有功-无功功率的精确分配.通过加入PCC处的电压损耗恢复环节,补偿了传统下垂控制引起的电压降落和线路电压损耗.当负荷变化时,可使电压快速、稳定地恢复到额定值附近.
最后,两台容量比为3∶2的逆变器并联运行在孤岛模式下,负荷突增前后,各逆变器输出的有功-无功功率均按3∶2的比例稳定输出,电压和频率均稳定在额定值附近,改进的下垂控制策略大大提高了功率分配精度,具有良好的稳态和动态性能,并且有效提高了系统电压和频率质量.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年5期)2016-03-22