
基于定位d轴谐波电压偏移的孤岛检测新方法
2022-03-23 04:56:24白洪山王鲁杨柏扬邱蕾霓丁丽青黄河遥
电气传动 2022年6期
白洪山,王鲁杨,柏扬,邱蕾霓,丁丽青,黄河遥
(1.上海电力大学电气工程学院,上海 200090;2.国网上海市电力公司,上海 200120;3.国网四川省电力公司,四川 成都 610094)
随着化石能源紧缺、环境污染等问题日益严重,新能源开发和利用不断增加,分布式发电技术的研究具有重大意义。光伏发电作为太阳能的主要利用方式,其波动性和间歇性给电网运行、控制及保护等方面造成诸多困难,孤岛故障就是其中之一。基于逆变器的光伏发电系统若发生非计划性孤岛故障而未能快速、准确检测切除,会对电能质量造成不良影响,损坏电网和用户设备,严重时可能威胁到电力检修人员的人身安全。由此引出了对孤岛检测多种方法的研究[1-2]。
现有的孤岛检测方法主要分为通信式、主动式和被动式[3]。通信式检测法通过传递开关状态信号进行判别,该类方法无检测盲区、可靠性高,但实现困难、成本高,不利于推广。主动式检测法是不断地向系统注入规律性扰动,当某项运行参数超过检测阈值时,则发生孤岛[4]。该类方法检测盲区小、灵敏度高,但会污染电能质量。文献[5]通过注入低频正弦无功电流扰动,使公共耦合点(point of common coupling,PCC)处频率发生波动,但其没有考虑多逆变器并网运行时,扰动注入不同步导致孤岛误判的问题。文献[6]通过实时反馈负载阻抗角改变注入的电流频率扰动,虽然完全消除了检测盲区,但造成了严重电流畸变问题。被动式检测法是通过实时监测PCC 点处电量变化来判定孤岛[7]。该类方法不影响系统电能质量和稳定性,但存在较大的局限性,如文献[8]以电压、频率作为特征量建立深度学习模型,虽然减小了检测盲区,但实际应用中很难获得大量的训练数据集,导致检测可靠性低,算法复杂而导致时效性差。
基于工频域的被动式孤岛检测法难以进一步突破,目前已有文献针对谐波域电量变化提出新的检测方法。文献[9]分析光伏电站高低次谐波电流输出特性,提出光伏电站动态谐波域模型,为本文建立光伏并网发电系统谐波电路模型提供基础;文献[10]提出以谐波电压为主、基波频率为辅的孤岛特征量,但其在强背景谐波场景下,存在检测盲区;文献[11]通过构建谐波阻抗特征函数作为孤岛特征量,利用BP 神经网络实现检测,但其代表频次谐波选取不合理,检测准确性下降;文献[12]利用PCC 点处特定次谐波阻抗d,q轴分量变化来判定孤岛,但并没有针对谐波信号门槛值的设定进行理论分析。
综上所述,实时监测谐波域本地电量的变化可实现被动式无盲区孤岛检测,但需要对谐波代表频次的选取、谐波特征量阈值的整定以及强背景谐波环境下检测可靠性的要求进一步研究。本文提出基于定位d轴谐波电压偏移的孤岛检测法,相较于目前已有的主动式检测法,未向并网系统注入扰动,对电能质量无污染,并且其独立作用于逆变器,多分布式电源并网运行时,检测可靠性高;与其他被动式检测法相比,该方法算法简单,响应速度快,特别针对在强背景谐波场景下,可实现孤岛故障的无盲区检测。
1 基于谐波域的孤岛检测分析
光伏发电系统正常并网运行时,由于大容量电网系统的等效阻抗非常小,与本地负荷并联,使得PCC 点处的等效阻抗很小,孤岛故障发生后,PCC 点处等效阻抗等于本地负荷阻抗。孤岛发生前后,PCC 点处等效谐波阻抗的变化引起谐波电压波动,可据此判定孤岛。
传统基于谐波域电量变化的孤岛检测法忽略来自电网侧背景谐波,近似认为由光伏侧提供主要的谐波电流。光伏并网发电系统谐波电路如图1所示。
在孤岛发生后,即并网开关K 断开,逆变器输出的谐波电流未发生突变,则PCC 点处的h次谐波电压变化为

式中:Upcc,h,U′pcc,h分别为孤岛发生前、后PCC 点处谐波电压;Ipv,h为逆变器输出谐波电流;ZL,h为负荷等效谐波阻抗;Zs,h为电网等效谐波阻抗。
基于谐波域电量变化的被动式孤岛检测法采用功率失配区间坐标来描述检测盲区。
孤岛发生前,负荷谐波有功功率PL,h为

孤岛发生后,若光伏发电系统工作在恒功率模式下,逆变器输出谐波有功功率Ppv,h保持不变,则PCC点处谐波电压有效值为

由式(2)~式(3)联立可得并网状态下功率不匹配表达式为

相较于传统电压判据,当负荷功率和光伏发电系统输出功率完全匹配时,负载品质因数Qf为1,孤岛处于极端状态,PCC 点处电压和频率几乎保持不变,但由于谐波阻抗的变化,导致PCC 点处谐波电压波动,故基于谐波电压变化的检测方法盲区更小,但该方法仍然存在较大的检测盲区,其原因如下:
1)大容量非线性负荷及电力电子设备投入电网系统,造成系统侧波形畸变严重,使得PCC点处谐波电压增加,而造成孤岛误判;
2)针对实际应用中的三相系统,在发生单相断路、两相断路情况下,仅用某一相的谐波电压变化建立孤岛判据,孤岛保护装置无法快速准确动作,造成孤岛漏检;
3)正常并网运行时,由太阳能的间歇性和波动性使光伏系统内部产生谐波电流源,造成PCC点处谐波电压波动,导致孤岛保护误动作。
针对上述问题,提出基于定位d轴谐波电压偏移的孤岛检测法。根据谐波有功功率贡献量定位原则,选取来自光伏侧和系统侧的代表频次谐波,并将2 个方向代表谐波频次d轴谐波电压偏移作为孤岛特征量,建立检测判据,有效地解决了检测盲区大、检测灵敏度低的问题。
2 基于定位d 轴谐波电压偏移的孤岛检测原理及实现
2.1 基于定位d轴谐波电压偏移的孤岛检测
在并网系统中,光伏发电系统与电网通过PCC 点进行能量交换。通过采集PCC 点处电压、各支路电流进行计算,分析光伏侧产生的谐波或电网中含有的背景谐波对并网系统的影响,进一步划分各次谐波责任大小[13]。
选择代表频次谐波时,一般在PCC 点处将光伏并网系统谐波等效电路分为光伏侧和系统侧,如图2a所示。利用诺顿等效原理,将两侧等效为谐波电流源和谐波阻抗的并联,如图2b所示。图中,Ipv,h和Is,h分别为光伏侧和系统侧谐波电流;Zeq,h为PCC 点处等效谐波阻抗;Ipcc,h和Upcc,h分别为PCC点处谐波电流和谐波电压。

图2 光伏并网发电系统谐波等效模型Fig.2 Harmonic equivalent model of PV grid-connected power system
光伏并网系统在正常运行和孤岛故障情况下,PCC点处等效谐波阻抗分别为

其中,h次谐波阻抗由基波阻抗计算可得:

式中:R,L,C为本地负荷;Xs为系统基波感抗;ω为PCC点处电压的角频率。
根据叠加定理,将图2b分解为单个谐波源作用下的诺顿等效电路,如图3所示。
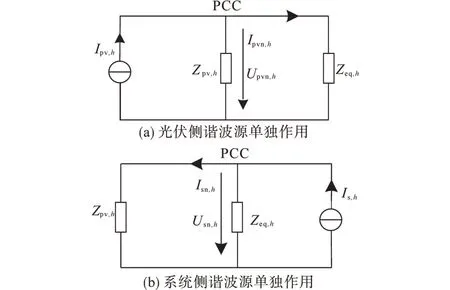
图3 分解后的诺顿等效电路Fig.3 Decomposed Norton equivalent circuit
计算来自光伏侧和系统侧的h次谐波源单独作用时,PCC点处谐波电流贡献量分别为

因此,在正常并网与孤岛情况下,光伏侧代表频次(h1次)谐波源在PCC点处产生的谐波电压Upvn,h1,分别为

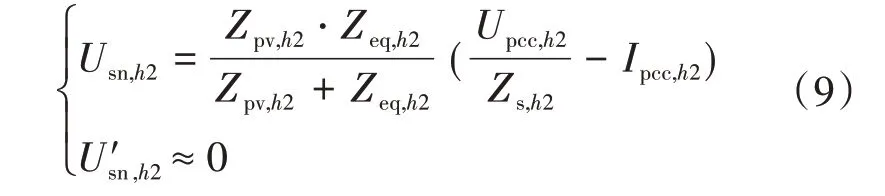
同理,在正常并网和孤岛故障情况下,系统侧代表频次(h2次)谐波源在PCC点处产生的谐波电压分别为
针对三相系统不同断路故障类型而形成的孤岛,利用Park 变换计算PCC 点处三相谐波电压贡献量d轴分量。再根据下式:

可得hi次d轴谐波电压偏移量,并将其作为孤岛特征。
综上所述,孤岛发生前后,光伏侧和系统侧代表频次谐波作用下的PCC点处d轴谐波电压发生偏移。可对代表频次(h1,h2)谐波电压d轴分量进行监测,并选择适当的检测阈值,当两个方向的孤岛特征量均超过阈值Kd,hi时,即可判定为孤岛故障。整定规则如下:

2.2 定位代表频次谐波
综合考虑来自光伏侧和系统侧方向谐波电压贡献量和谐波电流贡献量的影响,本文采用谐波有功功率贡献量来选择主谐波源代表频次,提高孤岛检测准确性。
根据式(7)~式(9),计算PCC 点处来自光伏侧和系统侧代表频次谐波源单独作用时,谐波有功功率贡献量Ppvn,h,Psn,h如下式:

式中:θ1,θ2分别为Zeq,h,Zpv,h的相角;分别为来自光伏侧和系统侧谐波电流贡献量Ipvn,h,Isn,h的共轭复数。
通过比较两个方向的谐波源单独作用下在PCC 点处有功功率贡献量的大小,判断主谐波源的位置并分类,判据如下:
1)当max(Ppvn,h1,ki,Psn,h1,ki)=Ppvn,h1,ki时,对于h1,ki次谐波,说明光伏侧对PCC 点处影响更大,h1,ki次主谐波源位于光伏侧;
2)当max(Ppvn,h2,ki,Psn,h2,ki)=Ppvn,h2,ki时,对 于h2,ki次谐波,说明系统侧对PCC 点处影响更大,h2,ki次主谐波源位于系统侧;
3)当Ppvn,h=Psn,h时,说明两侧谐波对PCC 处的影响相等,为简化算法,将其划分至光伏侧主要责任。
由于实际应用中变压器的接线方式,3 次谐波可能无法流通至孤岛保护装置监测点,并且高次谐波受容性负载的影响大,难以检测。故根据谐波有功功率贡献量判据,对5~19 次谐波进行责任划分,设置光伏侧谐波代表频次为h1,系统侧谐波代表频次为h2。
代表谐波频次选取规则如下式:

其中,ki=1,2,3,…,8,且k1+k2=8。
2.3 孤岛特征理论阈值计算方法
基于谐波域电量变化的孤岛检测法存在阈值难以整定的问题,本文提供一种求取d轴谐波电压偏移理论阈值Kd,h的方法。由式(5)、式(10)可得孤岛前后d轴谐波电压偏差为

为了防止系统滤波后造成的孤岛误判,设置谐波整定裕度Km,取值为[0.9,1.1]。
设置极端工况下,考虑到孤岛故障后所能形成最大负荷的孤岛运行状态,以光伏最大出力近似代替系统最大负荷容量。由此可得:

式中:UN为电网额定电压;SL为负荷容量;Spv,max为光伏出力最大负荷容量。
由于电网系统等效阻抗中电阻远小于感抗,可忽略其电阻。而在最小运行方式下,系统短路阻抗最大,导致孤岛前后d轴谐波电压偏移量最小,孤岛故障最难识别,故系统感抗由短路阻抗近似代替,由此可得:

式中:Sk,min为最小运行方式下的短路容量。
根据式(6)、式(15)、式(16),计算h1,h2次负荷谐波阻抗与电网等效谐波阻抗,代入式(14)计算d轴谐波电压偏移理论阈值。
实际应用中,通过采集系统电压和电流参数,实时计算并调整d轴谐波电压偏移阈值,结合谐波有功功率贡献量定位原则,可有效防止因并网系统谐波治理造成的孤岛漏检。
2.4 实现流程
定位d轴谐波电压偏移的孤岛检测法实现过程主要步骤如下:
1)实时采集三相光伏并网发电系统PCC 点处电压、逆变器输出电流、电网系统输出电流,采用滑动加窗傅里叶变换同步计算5~19次谐波电压、谐波电流的幅值和相位。
2)根据式(12)计算PCC 点处来自光伏侧、系统侧各次谐波有功功率贡献量。
3)根据谐波有功功率贡献量对各次谐波进行责任划分;根据式(13)选择光伏侧谐波代表频次为h1,系统侧谐波代表频次为h2。
4)根据式(14)计算d轴谐波电压偏移理论阈值Kd,h1,Kd,h2。
5)根据式(8)、式(9)计算PCC 点处时窗T前后的h1,h2次谐波电压贡献量Upvn,h1(T),Upvn,h1(T+1),Usn,h2(T),Usn,h2(T+1)。
6)对PCC 点处h1,h2次三相谐波电压贡献量Park 变换,提取d轴分量;根据式(10)计算时窗T前后d轴谐波电压偏移Ud,h1%,Ud,h2%。
7)将Ud,h1%,Ud,h2%与对应的理论阈值对比。若二者均超出阈值,则判定为孤岛故障,并采取孤岛保护措施;若均不超出阈值,则为正常并网运行状态,返回步骤5),继续同步监测运行状态;若仅单项超出阈值则可判定为非孤岛故障,发出警告提示。孤岛判据的整定方法如式(11)。
2.5 检测盲区分析
由式(4)经过Park 变换可得,系统工作在恒功率模式时,所提新方法的盲区边界公式如下:

可以看出,所提新方法类似于谐波电压判据检测盲区,但在此基础上,进一步缩小检测盲区。一方面,系统侧强背景谐波和光伏发电间歇性的干扰下,两个方向的判据共同作用,防止孤岛保护误动;另一方面,实际应用中,三相并网系统采用d轴分量检测孤岛,防止在单相及两相断路情况下的孤岛漏检。另外,灵活设置孤岛特征阈值,在强背景谐波场景下,理论上可实现无盲区检测。
基于光伏电站接入电网测试规程[14]中定义的极端工况进行孤岛检测仿真验证,即孤岛内功率平衡,负荷在50 Hz 附近谐振,负载品质因数为1±0.1。若最恶劣工况下设置各种故障均能被准确识别是否处于孤岛状态,则表明该方法可实现无盲区检测。
3 仿真验证及分析
本文使用Matlab 软件对所提方法进行仿真验证,三相光伏并网发电系统模型如图4所示,并设置孤岛极端工况参数如下:电网额定电压380 V,频率50 Hz,电网等效感抗Xs=j0.20 Ω,含0.8%的11 次背景谐波,取Km=1.1;光伏阵列输出电压500 V,逆变器输出线电压380 V,输出功率25 kW,光伏发电系统等效阻抗Zpv=0.15+j1.22 Ω;本地负荷ZL采用品质因数为1 的RLC 并联负载,且在工频处发生谐振,取R=6 Ω,L=19.11 mH,C=530.79µF。

图4 三相光伏并网发电系统仿真模型Fig.4 Simulation model of three-phase photovoltaic grid-connected power system
仿真时长1.2 s,采样频率4.8 kHz,采样时间0.2 s(0.7 s—0.9 s)。如图5所示,0.8 s时刻发生孤岛,PCC 点处三相相电压的幅值和相位基本未发生改变,光伏输出功率与负荷吸收功率完全匹配,说明此时孤岛处于最严重的状态,但其d轴分量出现明显变化,且在相电压幅值附近周期性波动,故可作为孤岛检测特征量。

图5 光伏并网发电系统运行参数图Fig.5 Operating parameters of photovoltaic grid-connected power system
光伏并网发电系统PCC 点处各次谐波有功功率贡献量的仿真结果如表1、表2 所示。由表1可得,对于5次、7次、9次、15次、17次谐波,Ppv,h1>Ps,h1,故在PCC 点处由光伏侧h1次谐波承担责任更大;同理,由表2可得,对于11次、13次、19次谐波,Ppv,h2<Ps,h2,PCC 点处由系统侧h2次谐波承担责任更大。故选择光伏侧谐波代表频次为5,系统侧谐波代表频次为11。由此可见,运用谐波有功功率贡献量可以定量地划分各次谐波责任大小,更加准确地定位谐波主要来源。设置孤岛检测理论阈值取Kd,5=122.37,Kd,11=54.43。

表1 光伏侧谐波有功功率贡献量Tab.1 Harmonic active power contribution of PV side
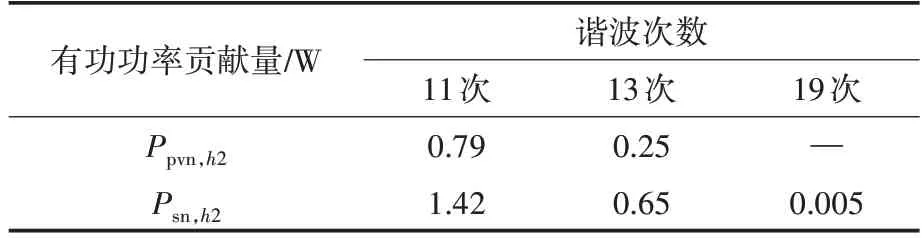
表2 系统侧谐波有功功率贡献量Tab.2 Harmonic active power contribution of system side
设置极端情况下的孤岛故障(包括三相断路、两相断路和单相断路),对照设置并网运行(包括光伏波动、负荷突变和电网电压降落)不同故障下进行仿真以验证所提方法的有效性。
图6 分别为极端工况下并网点处发生A相断路、AB两相断路而形成孤岛,光伏侧、系统侧代表频次谐波d轴谐波电压偏移波形变化。可以看出,正常并网运行时,5 次、11 次d轴谐波电压偏移基本为零;而0.8 s时刻,发生孤岛故障,针对并网系统不同断路类型,5 次、11 次谐波d轴谐波电压偏移量逐渐发生变化,均超过其对应检测阈值,判定为孤岛故障。同时极端工况所发生的3种断路故障下,该方法均在1 个周期内成功检测出孤岛状态,对比已有被动式检测法,如文献[7],在最恶劣工况下,只需0.08 s检出并切除孤岛,远小于IEEE Std.1547 规定的2 s 标准。故在极端工况下,本文所提方法可有效防止孤岛漏检,且响应时间非常短。
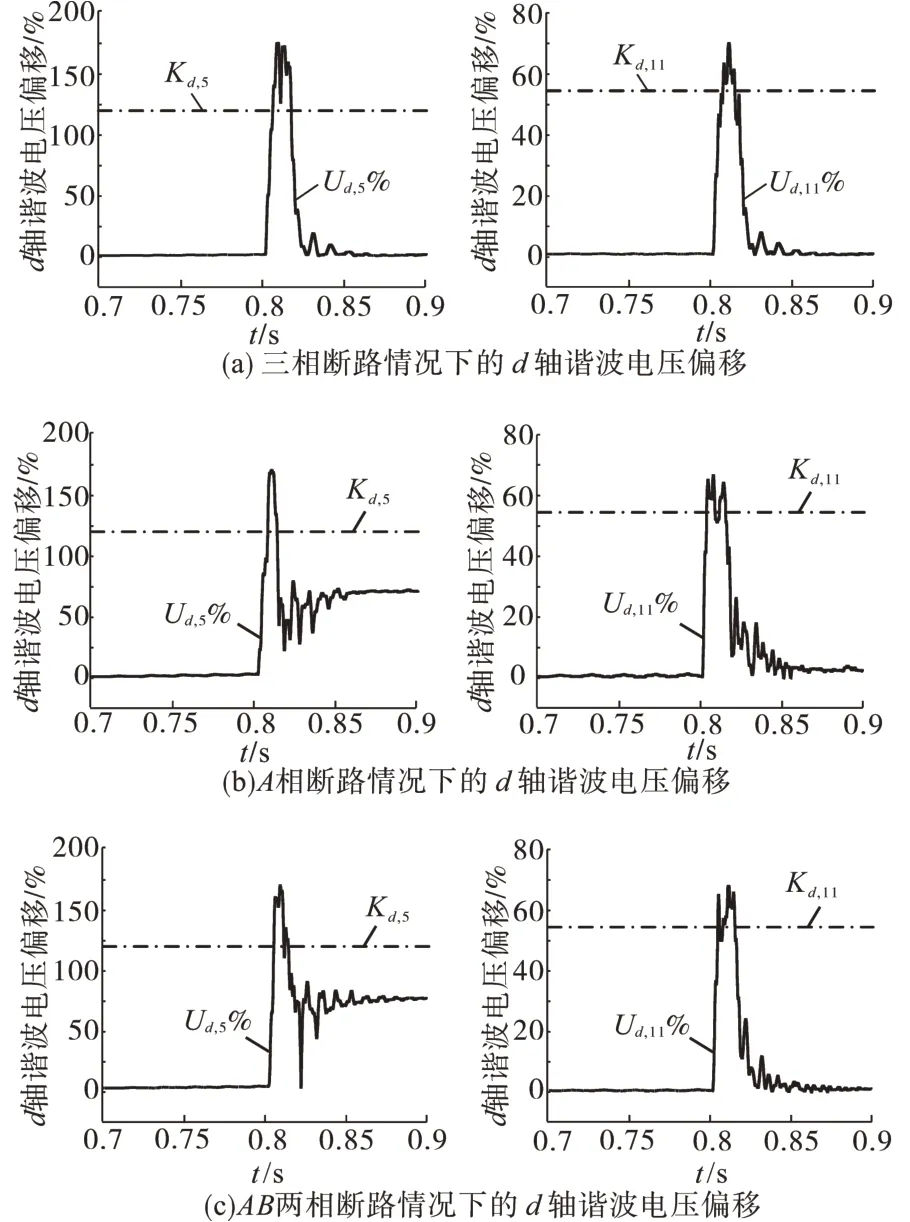
图6 孤岛故障仿真波形Fig.6 Simulation waveforms of islanding fault
由于太阳能发电的间歇性和波动性,光伏出力随环境变化而改变,造成逆变器输出谐波电流波动,从而影响PCC 点处d轴谐波电压偏移量。光伏发电并网系统正常运行在极端工况下,设置0.8 s时刻,光伏模块的光照强度由1 000 kW/m2降至500 kW/m2,仿真结果如图7 所示。可以看出,0.8 s 时刻后,光伏侧5 次谐波d轴谐波电压偏移量快速地超过了孤岛特征阈值,而相对应的系统侧11次孤岛特征量虽有变化,但明显较小。光伏并网发电系统继续运行,孤岛保护装置发出警告提示。故在极端工况下所提方法可有效防止光伏波动造成的孤岛误判。

图7 光伏波动时d轴谐波电压偏移波形Fig.7 Waveforms of d-axis harmonic voltage offset during photovoltaic fluctuation
电网电压跌落瞬间,光伏发电系统仍处于并网运行状态,光伏侧和系统侧有功功率出现偏差,引起谐波电压增加,从而影响PCC点处d轴谐波电压偏移量。光伏发电并网系统正常运行在极端工况下,设置0.8 s 时刻,电网电压跌落到额定值的80%。仿真结果如图8 所示,11 次谐波d轴谐波电压偏移量超过孤岛特征阈值,5 次d轴谐波电压偏移量虽有变化,但波动较小且未超过阈值,光伏并网发电系统继续运行,孤岛保护装置发出警告提示。故在极端工况下所提方法可有效防止电网电压跌落造成的孤岛误判。

图8 电网电压跌落时d轴谐波电压偏移波形Fig.8 Waveforms of d-axis harmonic voltage offset during the grid voltage drop
PCC 点处谐波等效阻抗由电网谐波等效阻抗和负荷谐波阻抗并联组成,且前者远小于后者,在正常并网运行的情况下,可近似认为PCC点谐波阻抗不变。光伏发电并网系统正常运行在极端工况下,设置0.8 s 时刻,负荷有功功率由25 kW 增至35 kW;1 s 时刻,增加10 kvar 感性无功功率;1.2 s时刻,增加5 kvar容性无功功率。仿真结果如图9 所示,当负荷发生突变时,11 次谐波d轴谐波电压偏移量超过孤岛特征阈值,而5次谐波d轴谐波电压偏移量低于检测阈值。光伏并网发电系统继续运行,孤岛保护装置发出警告提示。故在极端工况下所提方法可有效防止负荷突变造成的孤岛误判。

图9 负荷突变时d轴谐波电压偏移波形Fig.9 Waveforms of d-axis harmonic voltage offset during the load mutation
4 结论
本文提出一种基于定位d轴谐波电压偏移的孤岛检测方法,详细分析了其工作原理、检测盲区、定位谐波代表频次的选取和孤岛理论阈值的计算,通过在最恶劣工况下的仿真实验,验证了其有效性。结果表明,同时考虑光伏侧和系统侧孤岛发生前、后PCC 点处谐波电压d轴分量变化情况,可以在孤岛极端情况下并网点发生单相及两相断路时仍准确识别孤岛,并在光伏波动、电网电压降落、负荷突变扰动下,发出警告提示。该方法与已有的检测法相比,可靠性高,响应速度快,对电能质量无污染,特别针对强背景谐波场景下,可实现孤岛故障的无盲区检测,具有良好的实用价值。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02 03:10:02
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
铁道通信信号(2018年12期)2019-01-31 05:36:42
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
资源再生(2017年4期)2017-06-15 20:28:30
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
中国卫生(2015年5期)2015-11-08 12:09:50
电源技术(2015年11期)2015-08-22 08:50:58
电测与仪表(2015年8期)2015-04-09 11:50:00
