终端区飞行冲突事件情景演变网络构建研究 *
2022-03-20 13:13李忆轩
中国安全生产科学技术 2022年2期
程 明,李忆轩
(中国民航大学 安全科学与工程学院,天津 300300)
0 引言
交叉跑道布局正成为超大型和大型机场发展的趋势,我国2019年投入运行的北京大兴机场和2021年投入运营的成都天府机场都采用了交叉跑道的布局[1]。交叉跑道构型,提高了运行的复杂度和危险性,需要分析机场终端区飞行冲突事件的演变情况,提升运行安全。
国外交叉跑道投入运行较早,机场周边是大多数危险接近发生和报告的地方[2]。美国联邦航空局[3](FAA)对报告的危险接进行分类,并提出分类的标准。已有学者在预测飞行轨迹[4]、进近阶段危急处置技术[5]、TSAA[6]与TCAS[7]告警、军民航冲突[8]、复飞[9]、跑道侵入[10]等方面取得了一定的研究成果。
“情景—应对”模式是当前突发事件应急领域的研究热点。王永明[11]提出了情景构建标准体系建议。郄子君等[12]研究了灾害情景及其演化推理的区域建模方法。程明等[13]利用重大飞行事故案例提出了多层次情景空间描述模型。梁文娟等[14]构建了面向航空器飞行事故的“情景-任务-绩效”应急模型。针对“台风”[15]、“LNG船舶港口泄漏”[16]、“化工园区火灾”[17]等重大突发事件的情景推演,体现了应用价值。
综上所述,机场终端区域主要关注提高TCAS等系统的性能对飞行冲突风险进行预防与处置,对于飞行冲突的情景演变机理研究相对较少。本文将以北京大兴机场的侧向交叉跑道布局为环境,采用复杂网络理论和情景分析方法,对终端区飞行冲突进行风险分析和情景演化网络构建,探索研究飞行冲突事件的新思路。
1 方法
1.1 理论方法
1)情景构建理论
本文中“情景”构建,是把同类或相似的案例提炼出不同的情景要素,情景节点、片段,并按照飞行冲突事件的时间序列进行分析,组成情景演变网络。因案例的局限性和个别信息存在缺失特点,引入不同类型的大量案例训练模型,提取关键词、逻辑关系,形成网状结构。
2)复杂网络理论
复杂网络基于系统理论、图论和统计理论,通过建立事故场景,可直观表征系统结构间的联系性[18-19]。复杂网络采用带权有向无环的稀疏矩阵连通图G=(V,L,W)描述,适用于研究演变机理复杂、影响因素众多且相互关系复杂的对象。侧向交叉跑道飞行冲突成因多变,演变过程复杂,适用于应用复杂网络进行研究。其基本概念包括:节点度、度中心性、介数中心性、接近度中心性以及最短路径等主要参数。
最短路径是起始事件到达结果事件最快的途径,边的权重表示前1节点引发后1节点的难易程度,如式(1)所示:
σst(v)=(V,S,A)
(1)
式中:σst(v)表示2个节点之间的最短路径;V={v1,v2,v3,…,vn}是节点的集合;S={s1,s2,s3,…,sn}是节点之间边的集合;A是边权值的集合。
3)风险熵
飞行冲突事件各节点间的风险传递过程具有不确定性,需以概率表征,即边权值。而复杂网络路径搜索算法多是通过遍历加法运算为基础。由于概率的不可加性,引入具有可加性的概率风险熵对风险传递状态进行度量[20]。如式(2)所示:
I=-lnp
(2)
式中:I表示风险事件的风险熵;p为风险事件发生的概率。
1.2 侧向交叉跑道运行风险分析
飞行冲突情景的初始风险因素的扰动将引发多种风险因子的非线性演变,最终引发飞行冲突。基于前期运行经验及收集国内外类似运行条件(包括:侧向交叉跑道、超大型机场、气象条件等)的飞行冲突案例数据,侧向交叉跑道运行环境下的飞行冲突主要安全风险如表1。

表1 侧向交叉跑道机场终端区飞行冲突的主要安全风险Table 1 Main safety risk of flight conflict in terminal area of lateral cross runway airport
1.3 模型构建流程
大兴机场交叉跑道进近阶段飞行冲突情景演化网络模型构建的步骤如下:
1)收集整理民航涉及交叉跑道运行的法律法规,分析大兴机场运行环境和自然环境相关数据资料。
2)整理2010—2019年飞行冲突事件及其相关事件共4 633起[20]。
其中国内飞行冲突案例71起[20]。此类案例主要选取国内与大兴机场运行环境类似,且拥有多条跑道的大型国际机场(例如首都机场)终端区的运输航空事件。
同时,由于全球范围交叉跑道冲突案例相对稀少,经检索各国航空事故事件数据库获得交叉跑道运行机场的飞行冲突事故/事件共46起[20],作为飞行冲突案例的补充数据。
相关事件案例包括中止进近、中断起飞、跑道不可用、航空器地面活动和无人机等共计5类事件的案例集。
3)构建不同类型案例下的情景组及演化模型,确定演化模型的相关参数,包括节点、边、权重等。
4)结合导致飞行冲突的主要安全风险(表1),分析其重要程度,优化网络参数,并绘制复杂网络图。
2 实证分析
2.1 实验假设
大兴机场飞行冲突的实验背景设定,如下:
1)11L/29R跑道投入运行:使用29R跑道进行落地,进近的航空器中止进近并复飞,其航迹与其他跑道上进行起降的航空器出现航迹交叉,可能导致飞行冲突的风险。
2)模型为有向有权网络,度最大的节点为涉及飞行冲突事件最多的致因因素。
2.2 模型参数
通过节点即关键词,与边即关键词之间的逻辑联系,形成情景演化网络的粗模型,后通过对节点进行筛选与合并等,多次迭代后,形成优化的情景演化复杂网络模型(见图1),参数如表2所示。
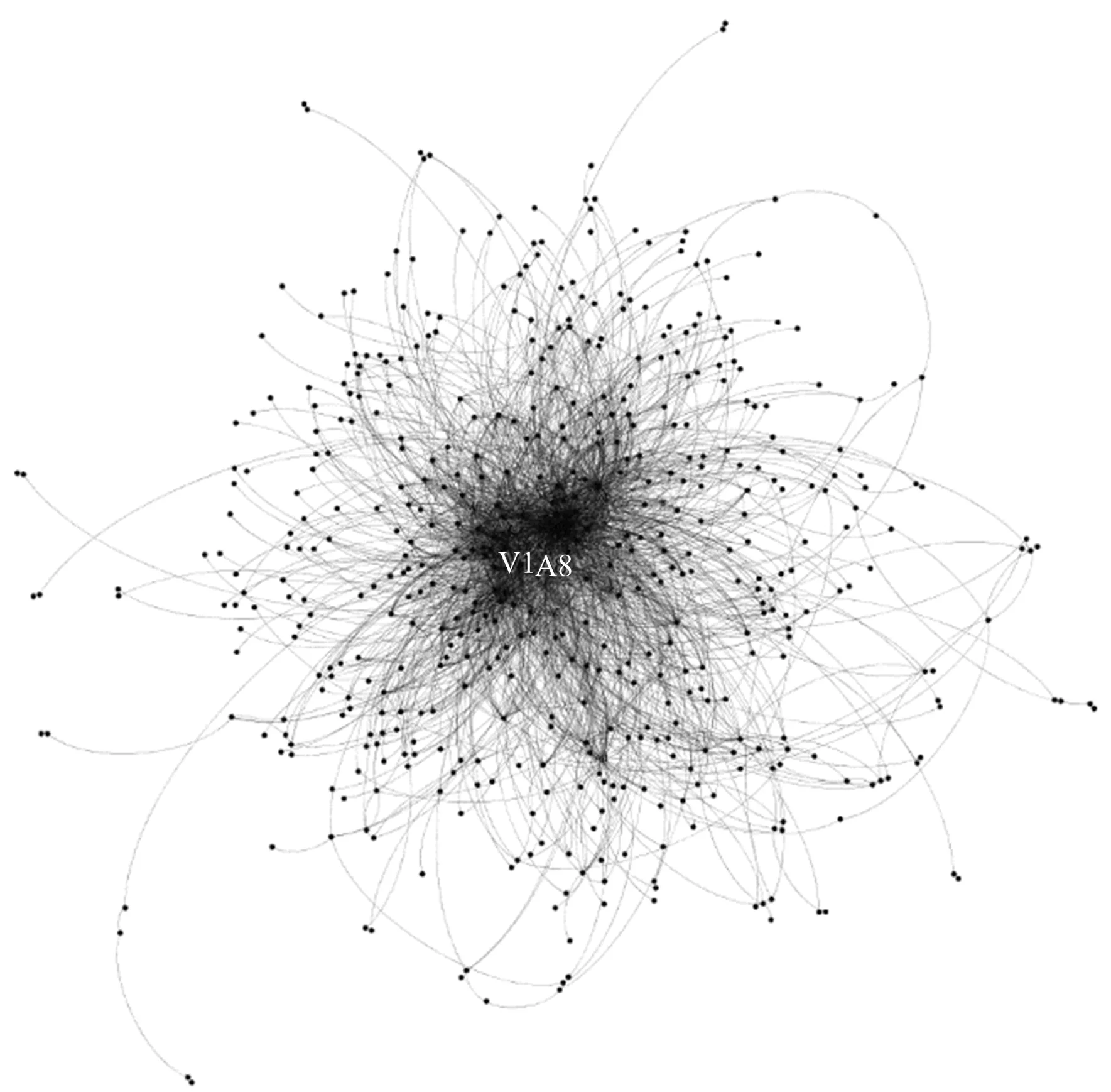
图1 飞行冲突事件演变复杂网络Fig.1 Complex network diagram for evolution of flight conflict incidents
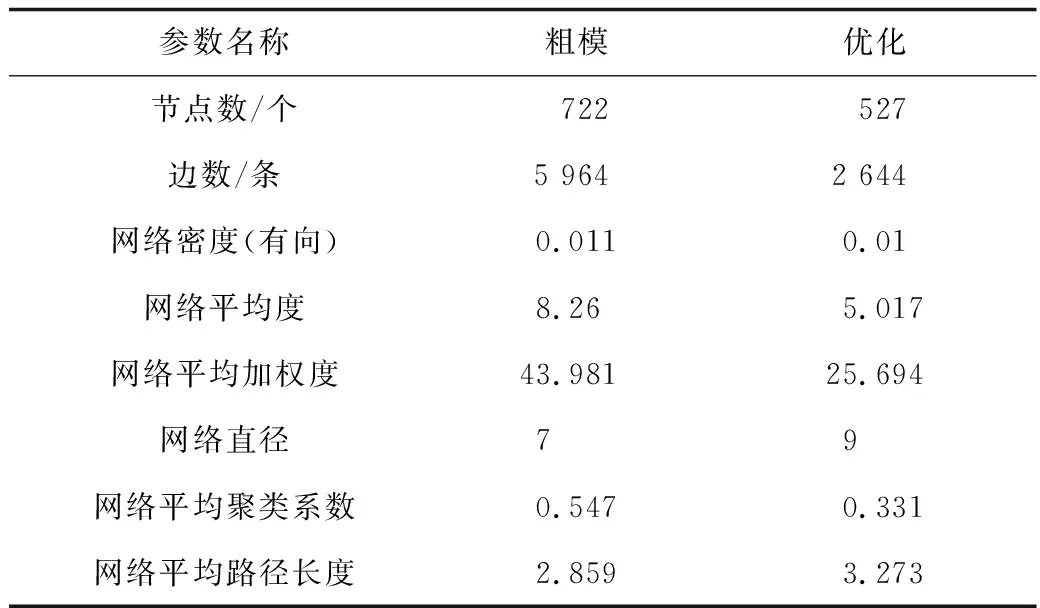
表2 模型参数Table 2 Model parameters
优化的结果如表2:
1)模型网络较为松散,节点相互间的联系不紧密,少量节点具有较大的度,符合无标度网络的特征;
2)优化后的网络平均度为5.017,即每个节点平均与5个其他节点相连,符合复杂网络的小世界特性;
3)迭代后的网络平均路径长度为3.273和网络直径为9,均显著增加,网络逻辑性增强;同时,平均聚类系数为0.331,节点之间聚集效应有所降低,演化性增强。
3 实验结果讨论
1)度及度分布
飞行运行中,航空器是飞行任务的主要承载体。入度方面,“航空器”入度124,为最大值,可以作为风险演化过程的起始节点。
表3中,多个涉及高度的节点度值较大,结果完全符合飞行冲突发生与高度强相关的实际情况。
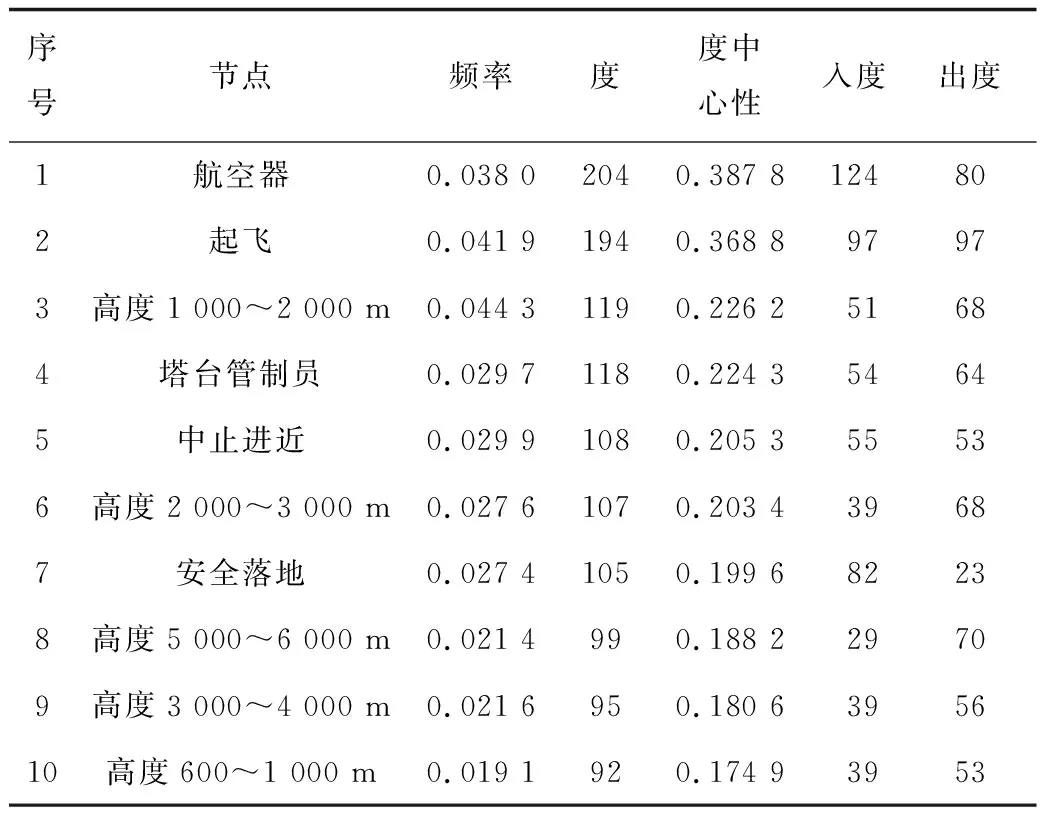
表3 节点度及度中心性Table 3 Nodes degree and degree centrality
2)介数中心性
由表4可知,“航空器”和“起飞”节点的介数中心性值最大,表明从这2个节点经过的最短路径条数最多,在整个网络的风险传导过程中起着“起始点”作用,符合现实。
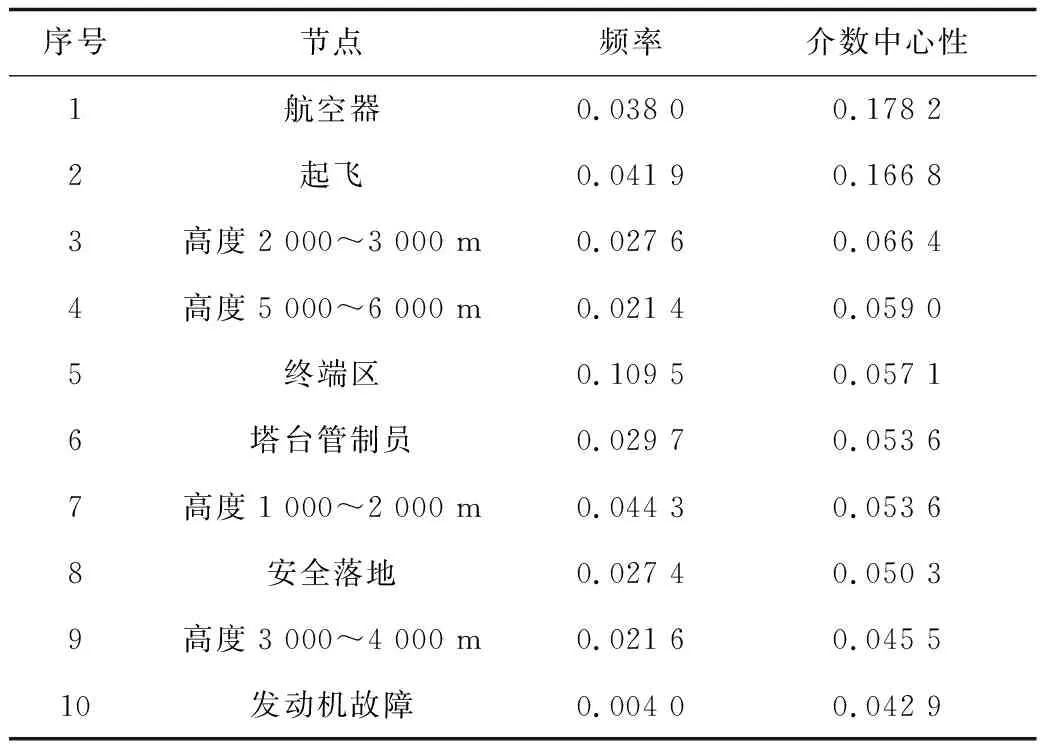
表4 介数中心性Table 4 Betweenness centrality
表4中,节点“高度1 000~2 000 m”、“高度2 000~3 000 m”、“高度3 000~4 000 m”和“高度5 000~6 000 m”的介数中心性明确了飞行冲突发生的最短路径所涉及的主要高度,对于运行中飞行冲突的预防具有重要的参考。
3)接近度中心性
接近度中心性值反映出节点位于网络当中的位置,值越大节点越靠近网络中心,对于实际而言,这类节点与其他节点联系最多,能够更快地到达网络的其他地方。
表5中“下降至5 000 m”的接近度中心性为1,在表3、表4中,节点“高度5 000~6 000 m”也在其中具有较高的重要性,说明在预防飞行冲突事件的过程中应重点关注5 000~6 000 m高度层。

表5 接近度中心性Table 5 Closeness centrality
航空器在运行过程中需要管制人员通过监视雷达对其飞行状态进行监视,所以“监视雷达”处于网络重要位置。
“潜在火灾或烟雾”、“航迹不稳定”和“GPS间歇性不工作”均与设备故障有关,“紧急定位发射器信号”是在管制员无法联系到航空器时使用,该节点也与无线电设备故障有关。在介数中心性(表4)的结果中,“发动机故障”在其中具有较高重要性,属于设备故障。
4)综合值
本文节点的综合值定义为度中心性、介数中心性和接近度中心性相加取平均值,以综合值描述各节点在网络中的重要程度如表6所示。
从综合值的结果来看“监视雷达”、“潜在火灾或烟雾”、“紧急定位发射器信号”和“航迹不稳定”均与设备故障有关,表明设备故障是导致飞行冲突事件发生的主要致因因素。
高度是导致飞行冲突的重要因素,“高度1 000~2 000 m”在度中心性、介数中心性和综合值的结果中均有节点涉及。
5)最短路径
指定“起飞”、“进场”节点作为起始节点,将可能导致飞行冲突发生的风险因素:“中止进近”、“避让”、“冲突”、“复飞”和“重新进近”节点作为终止点,如表7。采用Dijkstra算法[21]计算飞行冲突情景演化的最短路径,并引用案例集所在地区的航班起降架次计算风险熵和概率值,结果如表8、表9。
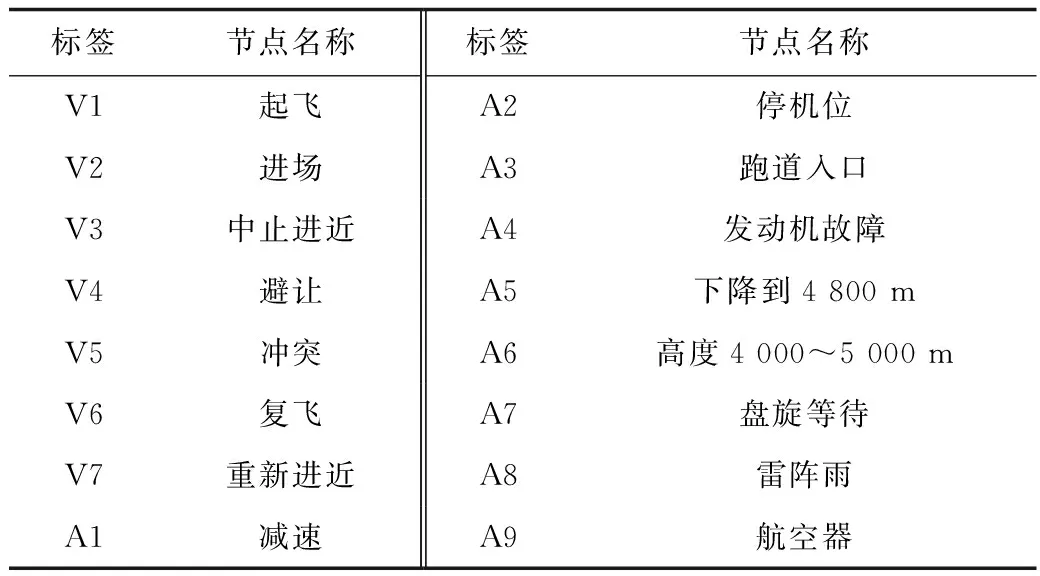
表7 最短路径的节点标签Table 7 Node labels of shortest path
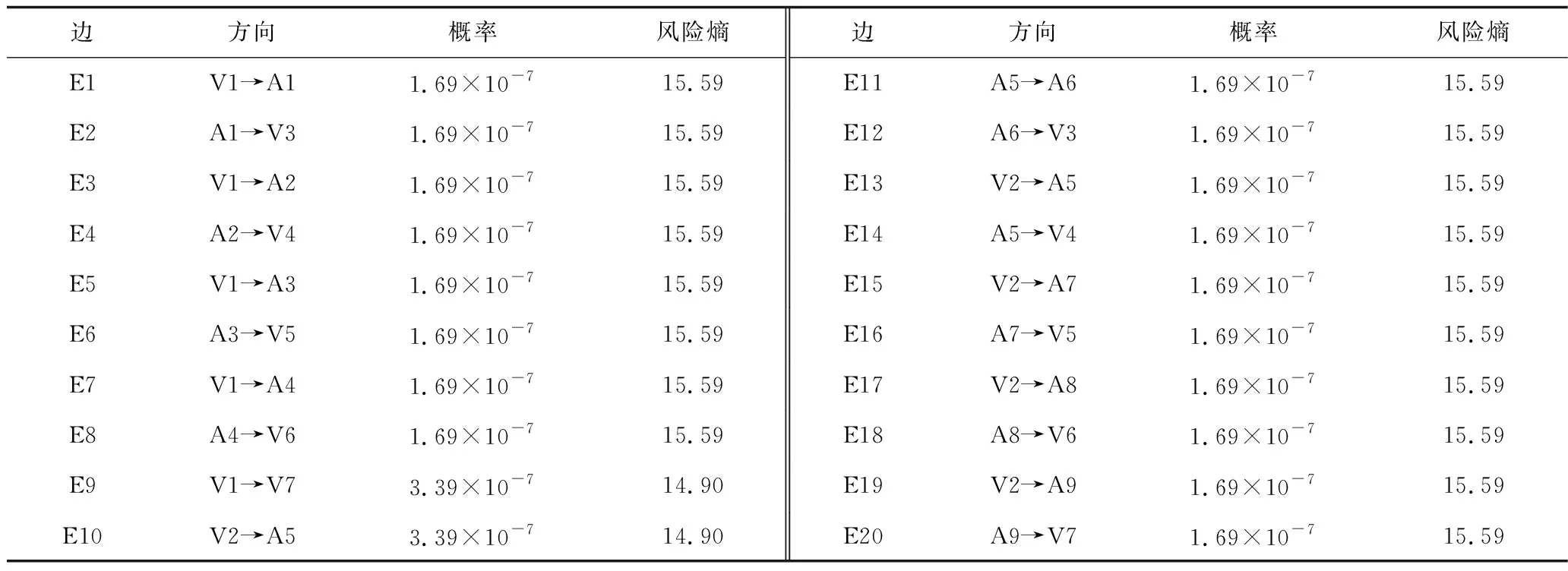
表8 边权值Table 8 Edges weights
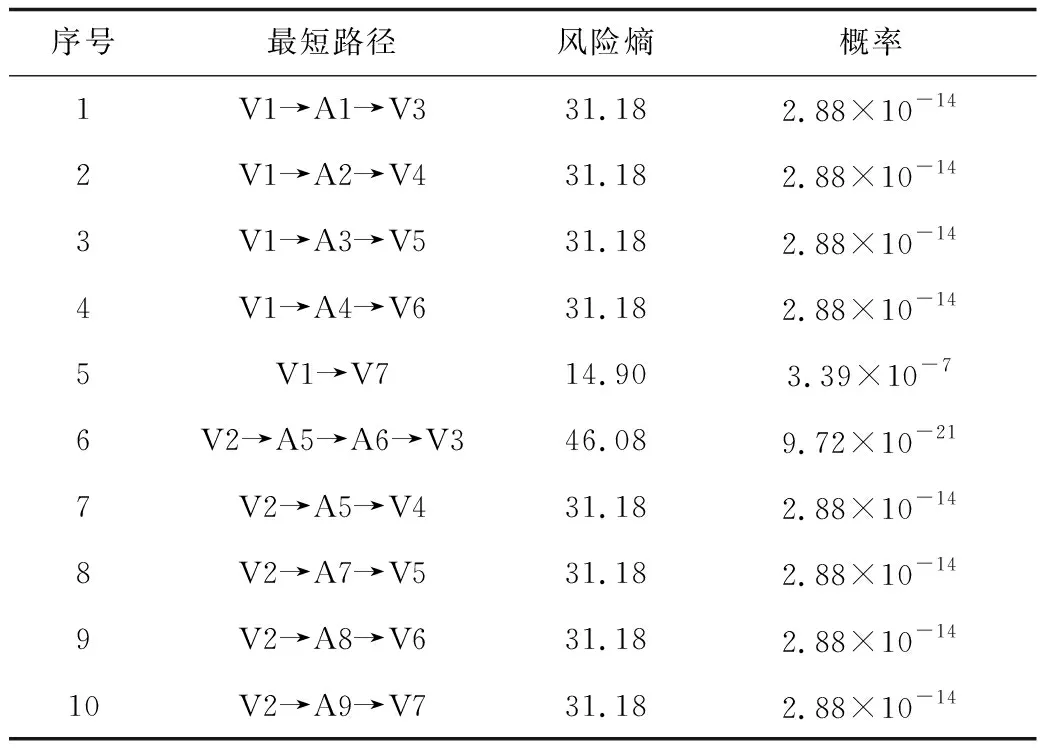
表9 最短路径Table 9 Shortest path
表9结果显示:
1)进场航空器在高度4 000~5 000 m的下降过程中最容易造成中止进近,起飞航空器的减速最容易引发中止进近;
2)“盘旋等待”最容易导致进场航空器“冲突”,“雷阵雨”最容易导致进场航空器“复飞”,并且“中止进近”和“复飞”具有因果关系;
3)进场航空器在“下降到4 800 m”时有避让的情况发生,该节点接近高度5 000 m,结合前文,飞行冲突事件的预防应重点关注高度在5 000 m范围内的情况;
4)起飞过程中“发动机故障”直接造成航空器复飞,在“跑道入口”会直接引发飞行冲突;
5)最短路径V1→V7的概率为3.39×10-7排在首位,表明起飞过程中导致落地航空器重新进近,最可能引发飞行冲突的风险,而且其概率值处于“偶然的”(1×10-7<1×10-5)等级,结合严重度,风险属于“不可接受”等级[22]。因此,交叉跑道构型的机场终端区应加强对起飞过程中航空器位置的监控,避免飞行冲突情况发生。
4 结论
1)飞行冲突类事件的案例分析、关键词提取、情景演变网络模型构建所需的过程和绘图均可由计算机程序完成,当有新的案例引入,或产生新的节点时,模型将自动构建新的网络。
2)识别出飞行冲突控制的关键节点主要为设备故障有关节点,包括“监视雷达”、“潜在火灾或烟雾”、“航迹不稳定”和“紧急定位发射器信号”。
3)机场终端区飞行冲突多发的高度,进场为1 000 m及其以下、2 000~3 000 m、3 000~4 000 m;离场为5 000 m附近。
4)最短路径发生概率最大为:“起飞→重新进近”,概率值为3.39×10-7,实现了对风险等级的量化。
猜你喜欢
疯狂英语·初中天地(2022年2期)2022-07-07
西华大学学报(自然科学版)(2022年2期)2022-03-17
今日农业(2021年12期)2021-11-28
初中生世界·八年级(2019年6期)2019-08-13
劳动保护(2019年3期)2019-05-16
北京航空航天大学学报(2017年4期)2017-11-23
小天使·一年级语数英综合(2017年3期)2017-04-25
小学生导刊(低年级)(2016年9期)2016-10-13
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10