重型车辆路径跟踪控制策略实现∗
2022-03-18 06:20:10李炎亮杨国平刘景锋
计算机与数字工程 2022年12期
江 奎 李炎亮 杨国平 刘景锋
(上海工程技术大学机械与汽车工程学院 上海 201620)
1 引言
路径跟踪作为智能驾驶决策重要功能之一,主要目标是合理规划车辆行驶路线,确保车辆能够精确按照行驶路径行驶。
路径规划中采用的控制策略主要包括最优控制、滑模控制及神经网络、模糊控制等,近年来也多采用深度学习等人工智能控制算法。文献[1]基于传统的滑膜控制器,提出RBF神经网路与滑膜控制相结合的控制策略;文献[2]基于车辆动力学模型提出一种带有前馈补偿和反馈的最优控制策略;文献[3]基于道路宽度及车辆几何结构,提出一种汽车道路带状模型的的评价方法。文献[4]基于线性时变系统,运用模型预测控制算法实现路径跟踪。文献[5]基于MPC进行轨迹跟踪控制系统的设计。
目前所研究的PID 控制及模型预测控制等算法,依然无法满足重型车辆在各种自主路面下的路径跟踪的要求。针对上述难题,结合实际项目,设计了一种新的路径跟踪控制策略,实现各种自主路面下的路径跟踪功能。
2 重型车辆二自由度模型
根据汽车理论[6]研究,将整车简化为理想化二自由模型,忽略转向系、悬架和空气阻力的影响。如图1所示。

图1 重型车辆三轴的二自由度的模型
参数如下所示:V为车辆行驶速度;li为第i轴到车身质心的距离;δi为第i轴车轮的转向角;u、v为质心速度V在x、y轴的分量;ωr为车辆绕z轴的角速度;β为车辆质心处的侧偏角。
式(1)为多桥转向车辆横向动力学普适公式,若定义第i轴转角和前轮转角的关系为kpi=δi δ1,则有
根据式(2)可以求出车辆转向的侧向加速度和横摆角速度,进行车辆操纵稳定性的研究[7~10]。
3 LFC预瞄模型
在建立重型车辆动力学模型的基础上,需要继续建立车辆-道路的预瞄模型[11~13],如图2所示。
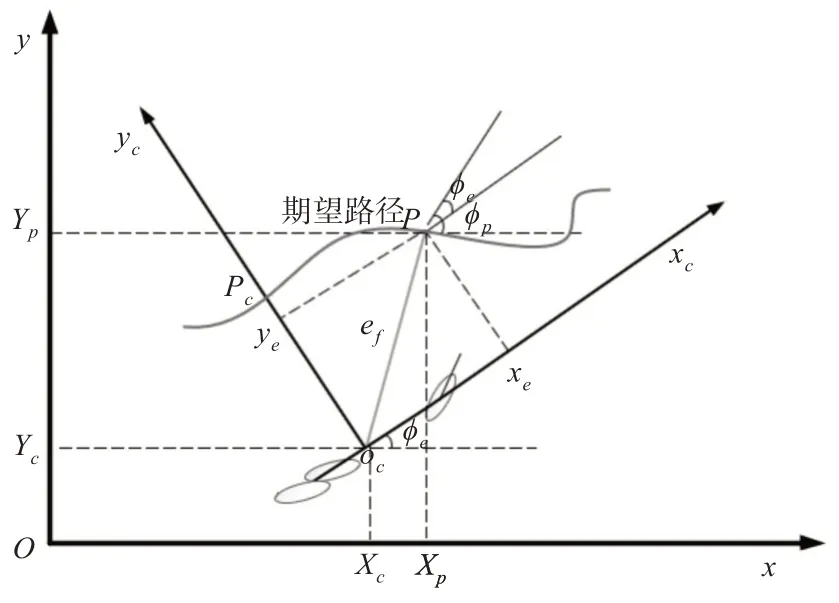
图2 车辆-道路预瞄模型
结合汽车自由度模型及预瞄模型,构建关系方程式:
主车与车道中心线的横向偏差距离公式:
ye为主车与预瞄点的横向偏差;ef为预瞄距离;ϕe为主车与中心线的航向偏差;Pc为车辆坐标系下质心与道路中心线的交点。
主车的横向偏差变化率公式:
式(4)中为主车与中心线之间横向位置的偏差变化率。
主车与中心线的航向偏差:
主车与中心线的航向偏差率:
由前面的关系最终得出预瞄偏差模型的关系式:
对于线性系统,可以建立关于状态向量和控制向量的二次型函数,求得解析解。
4 最优控制策略
最优控制策略的目的根据车辆自由度模型及预瞄模型求最优期望转角和速度,实现控制算法预期目标。
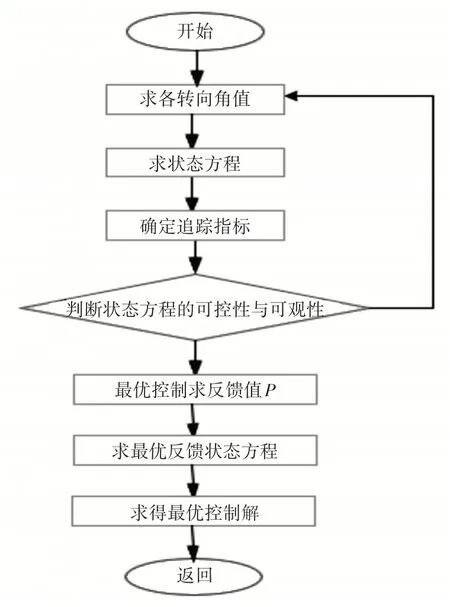
图3 最优控制算法流程图
在LQ中,受控系统表达式:
选取主车与车道中心线的横向偏差及航向偏差作为状态量,前轮转角作为控制量。
x(tf)为t=tf时的末状态,加权阵S为n·n半正定对称阵,加权阵Q为n·n半正定对称阵加权阵R为r·r正定对称阵。
根据庞脱里雅金原理[14~15],可得到使J为极小值的最优控制:
式(11)表 明,当 取δ*(t)=-R-1BP(t)x*(t) 时,J(δ(∙) )取最小值。
由于矩阵Riccati 方程[16]解的唯一性,即P(t)是唯一的,则反馈阵:
最优控制器后系统的状态方程为
最终可以求得最优解。
5 模型构建及仿真分析
基于重型车辆的动力学模型及建立的车辆-道路预瞄模型,在Matlab 中构建整车模型,具体框架如图4所示。

图4 Matlab模型框架
主要分为输入输出信号模块、车辆控制模块、ADAS控制模块和融合感知模块等四部分。
5.1 车辆控制功能
通过ADAS 计算的期望车速与主车实际车速通过PID 控制算法,实现实际车速能够快速准确地跟随期望车速。

图5 车辆控制原理图
5.2 ADAS控制算法
首先给定初始时刻实际车速为0m/s 的主车一个启动车速,避免加速过快的弊端;达到设定的启动车速阈值2m/s 时,开始执行加速逻辑,当车速加速到理想的状态值后,保持匀速行驶。设定主车与目标点在一定距离时执行减速逻辑,保证能够在目标点位置精确停靠。
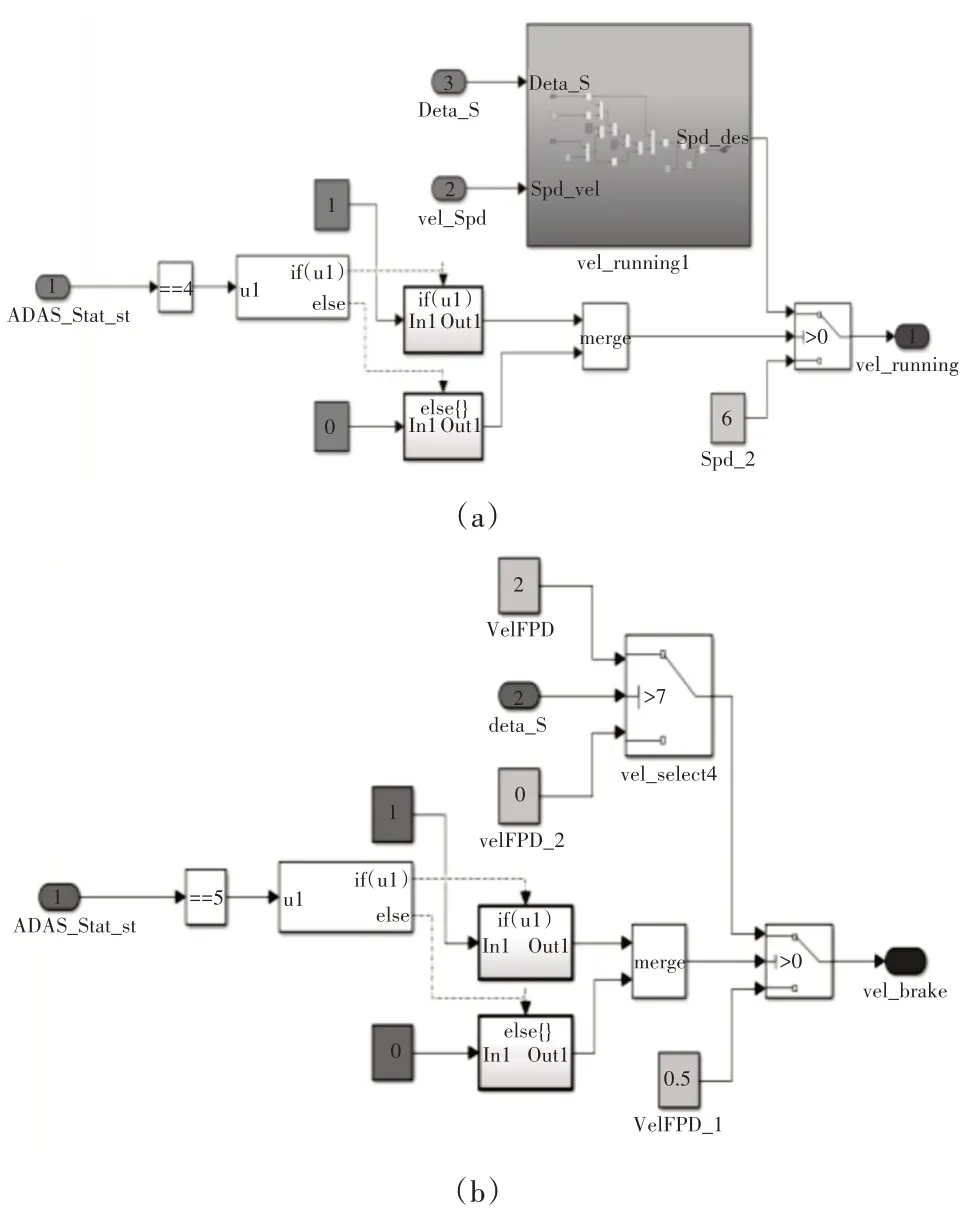
图6 整车加速减速算法
5.3 Trucksim联合仿真验证
1)Trucksim 测试环境的搭建主要进行“人-车-路”的搭建,即驾驶员配置参数(转向、制动和初始车速的配置),整车参数的配置要与实际车辆参数尽量保持一致;路况的设置可以根据验证要求进行搭建包括坡度转弯及道路摩擦系数等。
2)配置好人车路参数后,配置周围环境路况,主要包括行驶车辆状态、车的数量和行人状态的设置。
3)下一步进行Trucksim 与Simulink 控制算法联合仿真测试,存在主要问题有Trucksim 与simu⁃link 输入输出接口的连接问题。即Trucksim 模块输出为simulink 模型的输入,Trucksim 模块输入为simulink模型的输出。
4)接口配置好以后可以进行联合仿真测试。
仿真效果图如图7所示。
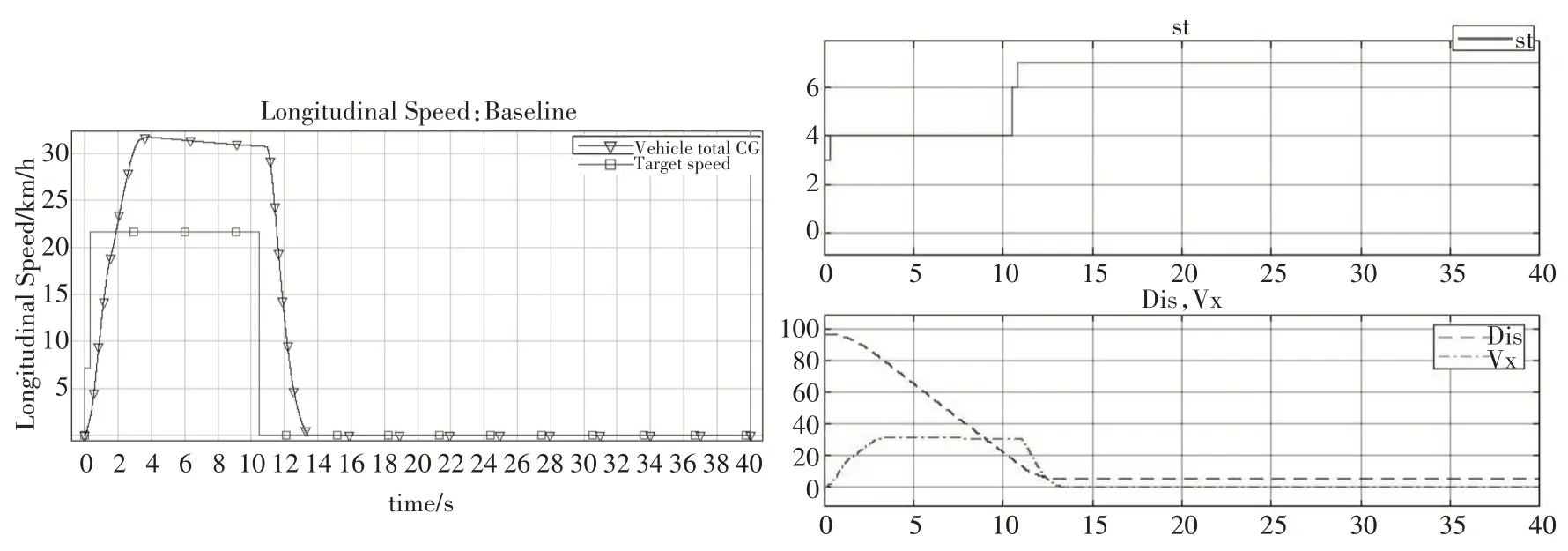
图7 Trucksim 虚拟仿真分析
在联合仿真分析中,分别模拟自动紧急刹车及直线定点行驶功能。从虚拟仿真分析可以看出:主车从初始点经历启动、加速、减速、停止过程。符合设计要求。

表1 主要计算参数
6 实车验证分析图
如图8 所示,为实车验证定点行驶功能时的实际运行曲线,当实车执行自动驾驶功能时,ADAS_CMD_st 的状态为1,此时如图8 蓝色曲线表示实车的实际车速。绿色曲线表示实车与目标定位点的距离,紫色曲线为自动驾驶与非自动驾驶的状态门槛值。从实际曲线可以得出实车的实际车速先加速再减速最终控制车辆姿态停靠到目标点。根据多次测试,实车可以实现较准确的目标位置停靠,达到设计验证要求。
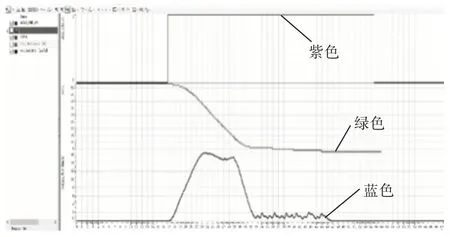
图8 实验数据分析1
在进行实车验证过程中,首先检验重型车辆装载的传感设备及整车开关等,设备连接成功后,将开关设置为自动导航状态,运行程序实车测试结果如图9 所示,从图中可以得到初始时刻整车距离障碍物的距离为50.4m,整车执行正常行驶状态,输出的工作模式观测量为0,当距离障碍物小于20m时,整车执行减速模式,同时触发预警信号,最终可以实现在距离障碍物5m时最终停车。

图9 实验数据分析2
7 结语
从实验结果分析,本文设计的控制策略能保证车辆实时在道路上行驶。当道路宽度发生变化时,该算法控制的重型车辆仍保持在道路上行驶,相比于传统的算法,有了更平滑的跟随效果。实车验证分析,该方法可以自动调整跟踪策略,有助于车辆自主地适应各种环境,如狭窄的道路、宽阔的道路和接近障碍物的环境等。
猜你喜欢
车主之友(2023年2期)2023-05-22 02:50:34
汽车实用技术(2022年19期)2022-10-19 07:46:24
汽车与驾驶维修(维修版)(2021年11期)2021-12-01 01:12:34
汽车与驾驶维修(维修版)(2021年11期)2021-11-24 13:03:45
内燃机与配件(2021年11期)2021-09-10 07:22:44
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:02
内燃机与配件(2020年20期)2020-09-10 07:53:49
数学物理学报(2019年3期)2019-07-23 01:15:38
数学物理学报(2018年3期)2018-07-17 06:15:30
时代汽车(2018年4期)2018-05-31 02:53:08