
航天器变构型模块化可维修技术
2022-03-17 07:24:10刘育强谭春林高振良王文龙
南京航空航天大学学报 2022年1期
刘育强,赵 阳,谭春林,高振良,王文龙
(1.北京空间飞行器总体设计部,北京 100094;2.哈尔滨工业大学航天学院,哈尔滨 150001)
随着空间技术的不断发展,航天器的功能密度越来越大、价值越来越高,在人类社会发展各方面起到的作用愈发突出。然而,航天器系统的复杂性和空间环境的特殊性,使得在轨故障难以避免,轻则使航天器功能损失、性能降级,重则导致整星失效,给国家和社会带来巨大损失。据1990 年以后美日欧成功发射航天器的在轨数据统计,超过30%的在轨故障导致航天器完全失效[1],2019 年8 月19日,中国中星18 号卫星发射后太阳翼未展开,导致整星全损[2]。有别于硬件故障难以在轨维修的传统航天器,可维修航天器是一种在研制之初就进行在轨可维修性设计,容易接受在轨维修维护服务,可以适应航天任务灵活定制,满足航天器性能升级、寿命增长和任务扩展等需求的新一代航天器。
可维修航天器最早可追溯到20 世纪70 年代,美国NASA 提出了多任务模块化航天器(Multi⁃mission spacecraft,MMS)的概念,并在1980 年至1992 年间发展了至少6 颗基于这一理念构建的模块化卫星[3⁃4]。此后,美国、日本等先后通过哈勃望远镜、ETS⁃Ⅶ(Engineering test satellite 7)卫星、轨道快车计划等项目[5],开展了可维修航天器技术的长期研究,实施了多次在轨验证。然而,航天器要具备可维修能力,需要付出额外的重量代价、增加设计复杂性,如何在代价最小的前提下实现可维修能力,还缺乏明确清晰的技术路线。
当前,中国已将可维修航天器技术写入国家“科技创新2030 重大项目”规划,作为未来航天技术发展的重要方向。本文在剖析国外可维修航天器技术特点的基础上,提出了一种兼顾维修性、先进性和实现代价的可维修航天器设计方法,设计了一种变构型模块化可维修航天器,阐述了涉及的关键技术,为中国可维修航天器发展提供参考。
1 国外技术发展现状
MMS 是首个具备在轨可维修能力的卫星平台,由三棱柱主结构和电源模块、姿态控制模块、通信与数据管理模块3 个分系统级别的基本功能模块组成,并配备大型推进模块、小型推进模块、载荷适配模块等可选模块;主结构外围的独立模块支持在轨更换,如图1 所示。“太阳峰年卫星”是首个采用MMS 平台实现在轨应用的卫星,而且接受了宇航员的在轨维修服务。虽然MMS 平台并不是专门针对在轨维修服务而设计的,但其开敞性架构和模块化设计,为其提供了可维修服务能力。受限于技术水平及低成本的考虑,MMS 平台模块化集中在分系统层面,模块数量少,可维修程度低;模块接口设计与内部功能耦合严重,内部功能只要微小改变,模块接口就需要重新设计。

图1 MMS 平台及其分系统级模块[3]Fig.1 MMS platform and its modules at subsystem level[3]
2005 年,NASA 提出了一种模块化、自适应可重构空间系统(Modular,adaptive,reconfigurable systems,MARS)的概念[4],如图2 所示。MARS 定义了模块化、自适应、可重构、系统4 个关键词,并将功能模块从分系统级别扩展到从系统至电路板和MEMS(Micro electromechanical system)设备等不同层级,并通过在接口层面进行标准化,应用商业标准,采用开源体系架构,模块化分层软件架构等,构建一个可以动态演化的航天器系统。此外,NASA 在高能空间系统项目中提出了模块化可重构高能技术(Modular,reconfigurable,highenergy(MRHE)technology)的概念[6],其目标之一是旨在发展自动交会对接技术、机器人在轨组装模块化空间系统、模块化可重构分布式综合电子系统等关键技术,从而为未来在低地球轨道组装大型太阳能系统奠定基础。

图2 MARS 航天器概念设计图[4]Fig.2 MARS spacecraft designs[4]
哈勃空间望远镜(Hubble space telescope,HST)是典型的可维修航天器,其从立项之初就采用了可维修性的设计理念,并贯彻整个研制过程。根据在轨维修需求,哈勃空间望远镜在部件级别设置了约70 个在轨可更换单元(Orbital replacement unit,ORU)[7⁃8],主要包括支持系统模块设备,如蓄电池、数据接口单元、机构控制单元等;光学望远镜模块,如数据接口单元、光学控制电子器件,以及焦平面设备等。哈勃空间望远镜在设计中考虑了ORU 在轨更换服务的可到达性,大部分ORU 安装在航天器周边的设备隔舱中,隔舱舱门可打开,使模块可被检测和操作。值得注意的是,哈勃空间望远镜的功能模块连接固定方式比较复杂,需要宇航员利用多种复杂专用工具完成,需长时间地面模拟演练和大量准备工作,难于在机器人提供在轨服务的一般卫星上应用。
2007 年,轨道快车(Orbital express,OE)计划在轨验证了自主交会对接、卫星推进剂传输、模块在轨更换以及可服务航天器设计等技术。轨道快车项目包括太空运输机器人服务舱(Autonomous space transfer and robotic orbiter,ASTRO)和未来星(NextSat/CSC)两颗卫星,其中,NextSat 卫星定位为下一代可维修卫星和商品化卫星[9⁃10],其维修性设计要素包括交会对接辅助设计、星间链路天线、维修操作接口、分离环、ORU 设备及ORU安装舱、流体传输模块;其中交会对接辅助设计包含被动对接敏感器、抓持装置等,维修操作接口包含对接机构、液路快速断接接口、电连接器等;ORU 包括锂离子蓄电池和计算机两个功能模块,均采用外置安装的方式,如图3 所示。除了在硬件上进行可维修性设计外,NextSat 卫星还配备了一种类似于状态机的模式管理软件,使得NextSat可以充当ASTRO 的自主代理终端,并根据AS⁃TRO 的操作指令进行状态切换,从而确保在不显著增加操作复杂性的情况下高度自主执行维修任务。

图3 轨道快车计划双星[5]Fig.3 Two satellites of orbital express[5]
2011 年开始,美国国防部先进研究项目局(DARPA),开始通过“凤凰”计划(Phoenix Proj⁃ect)资助诺瓦沃克斯公司研究模块化可重构的“细胞星”[11⁃12]。“凤凰”计划主要针对GEO 卫星零部件重用技术开展研究,其设想为通过机械臂操作将GEO 卫星的大型天线进行拆解,并利用多个细胞星附着其后,在轨构成一颗新卫星,如图4 所示,以实现卫星高价值部件的在轨重用和航天器的新生重构。2015 年底至2017 年期间,宇航员在国际空间站上多次开展了“超级集成细胞星”和有效载荷在轨组装构建新卫星及其释放应用试验,验证了“细胞星”聚合体平台兼容卫星有效载荷的能力。“凤凰”计划的可维修特点主要体现在通用化货架式承载结构技术、结构和接口标准化设计、可重用技术、可按需重构升级、可在轨组装等方面。
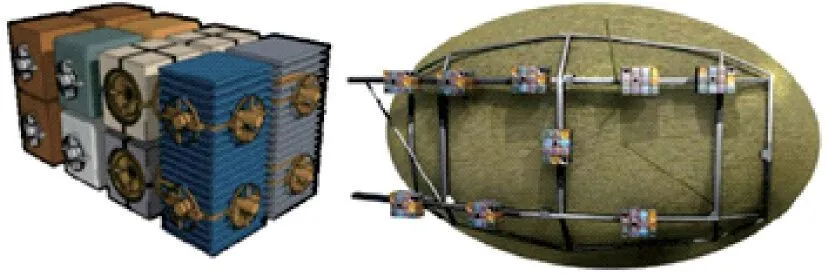
图4 细胞星集成及与天线重构利用[13]Fig.4 Concept of Satlet integration and reconfiguration with a retrieved antenna[13]
2015 年,美国提出了“用于科学探索的可重构运行航天器”(Reconfigurable operational spacecraft for science and exploration,ROSE)项目[14],旨在开发一种低成本的在轨可维修航天器,以提升商业竞争能力。在总结MMS 和HST 经验教训的基础上,ROSE 航天器进行了适度模块化设计,配置6 个可更换模块,具备推进剂在轨可补加能力,见图5。
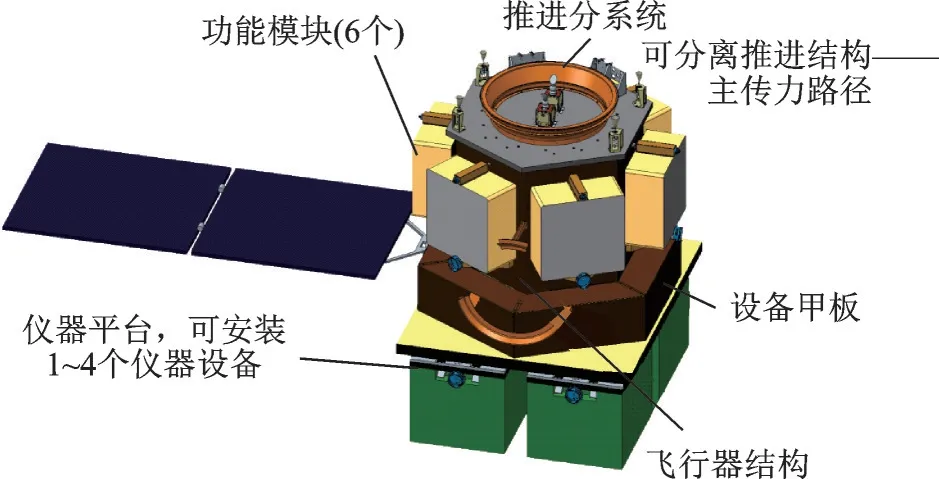
图5 ROSE 航天器纵览[14]Fig.5 ROSE spacecraft overview[14]
除美国外,日本和德国也开展了可维修航天器技术相关研究。1997 年,日本利用ETS⁃Ⅶ卫星在轨验证了ORU 更换、在轨加注、桁架组装和天线装配等技术。2010 年,德国宇航中心提出了面向卫星在轨服务的智能积木(Intelligent building blocks for on⁃orbit satellite servicing)项目。该项目发展了具有统一接口的同构化功能模块,模块构型为立方体,边长40 cm,30 个模块可构成一颗典型可维修卫星[15],如图6 所示。iBOSS 项目追求高度可重构性,系统体积、重量代价较大。
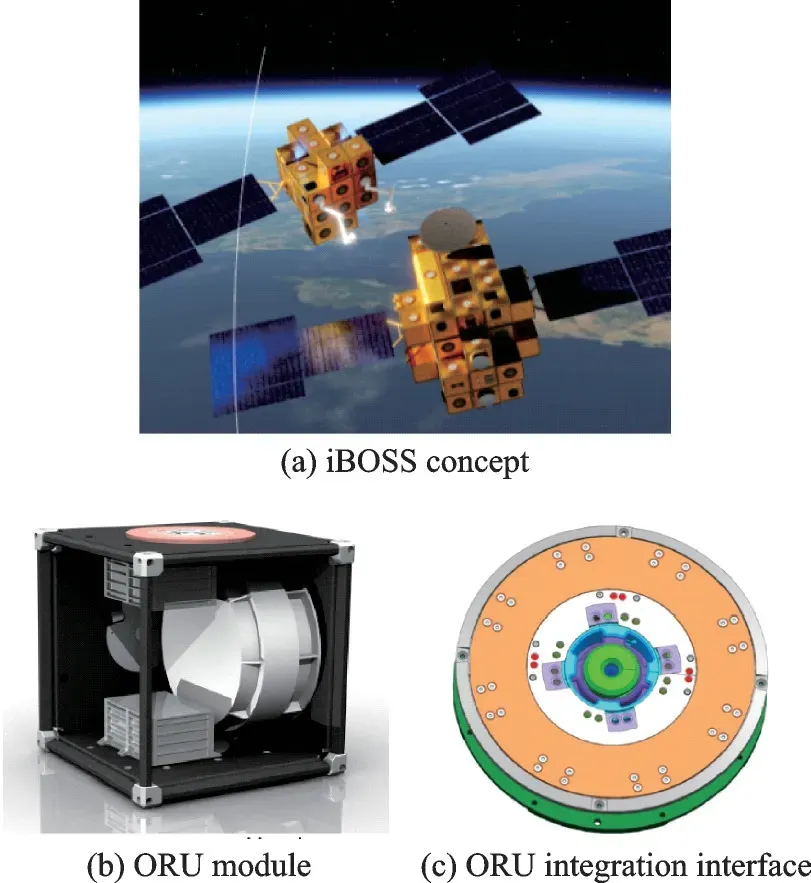
图6 iBOSS 项目概念图[16]Fig.6 Concept of iBOSS project[16]
综合而言,当前航天器可维修能力较少从可维修体系上综合优化,功能模块颗粒度划分不一,可维修构型布局与接口设计方面代价大、接口标准化方面考虑不足,较少考虑航天器的具体应用场景,阻碍了可维修航天器技术的推广应用。
2 变构型可维修航天器设计
实现航天器可维修能力的同时,兼顾性能先进、代价最小,核心是构建合适的航天器体系架构、分级适度的航天器功能模块体系与接口体系。本文提出的可维修航天器通用设计方法从这3 方面进行阐述,并据此设计一种典型的变构型模块化可维修航天器。
2.1 可维修体系架构
航天器可维修体系架构是实现航天器在轨可维修的核心,也是确保航天器功能性能可随技术发展而动态升级演化的关键。可维修体系架构由开放式机械体系、分布式异构网络体系、可补加动力体系3 部分构成。其中,开放式机械体系为可维修航天器在轨维修、重构与组装拓展提供维修操作通道和静力承载基础;分布式异构网络体系从功率流、信息流、动力控制流、热流等方面为可维修航天器提供异构集成、互联互通的分布式系统,为系统弹性可塑提供根本保障;可补加动力体系为推进剂等消耗性工质提供在轨接受补加的能力。
(1)开放式机械体系
与传统航天器相比,可维修航天器需要支持在轨维修操作,除需满足高效承载的要求外,还要求机械体系具有开敞性和维修操作可达性,并具备可扩展和可重构能力,以支持航天器模块更换、系统扩展、在轨组装等应用需求。传统不可维修航天器机械体系架构与可维修航天器机械体系架构的区别如表1 所示。

表1 航天器不同机械体系架构区别Table 1 Differences between different mechanical architectures of spacecraft
根据上述设计思想,基于主结构可变构型的理念,设计了一种伸展式变构型可维修航天器,其构型如图7 所示。整星由主结构(能源动力舱)、两侧扩展结构(侧舱)、顶部扩展结构(顶舱)4 个一级机械模块组成。3 个扩展结构外部均可安装有效载荷,或进行航天器在轨组装拓展,内部安装可更换功能模块;主结构外部安装太阳翼,内部安装推进剂贮箱等大型部组件和不可更换设备,也可安装部分可更换功能模块。
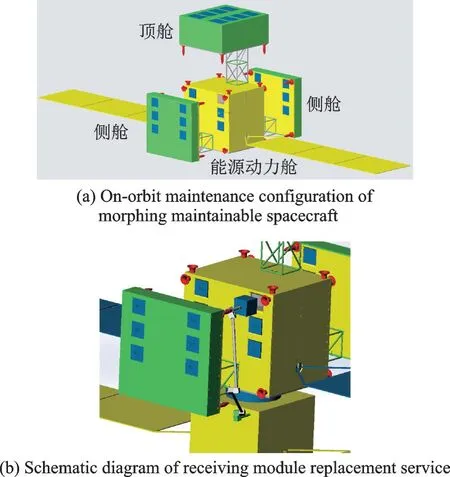
图7 一种变构型可维修航天器Fig.7 A maintainable spacecraft with variable configuration
在轨维修时,通过可重复伸展机构将扩展结构与主结构分离,为内部功能模块在轨更换建立维修操作通道。根据有效载荷安装不同,扩展结构内部的可更换功能模块既可以进行外挂安装,也可以进行内置安装,以实现载荷的灵活适配性和维修操作的灵活适应性。当可更换功能模块进行内置安装时,扩展结构外部可安装有效载荷,如通信卫星的可展开反射面天线、天线馈源等。
(2)分布式异构网络体系
当前,航天器各分系统多为集中式系统,系统间、设备间相互耦合程度高,且存在跨系统互联互通难、智能化程度低等不足,难以支持在轨维修维护。对此,本文提出一种可突破传统分系统约束的分布式异构网络体系架构,旨在为航天器在轨可维修能力的生成提供根本保障,如图8所示。

图8 分布式异构网络体系Fig.8 Distributed heterogeneous network architecture
该体系架构的核心在于采用一条或多条公用功率总线、信息总线和热总线为纽带,建立一个分布式的对等网络系统;再采用即插即用接口技术、部件自描述技术、即插即用软件技术等将一般硬件设备总线化和智能化,并将其连接到分布式对等网络系统,从而构成一个由不同分系统设备异构连接的网络系统。其中,功率总线可通过汇流条、定制电缆网实现,信息总线由定制电缆网实现,热总线可由流体回路系统或热管网络实现。一般而言,功率总线、信息总线、热总线不进行在轨维修性设计;必要时也可以与卫星舱板进行一体化设计,形成可更换智能舱板系统。同时,通过同类资源聚类划分、分区管理,在设备层面实现功能的重新聚类和即插即用,确保可维修航天器在本质上支持在轨维修、在轨更换、系统重构与扩展、多任务自适应等新需求,并在系统层面实现性能优化、代价低廉。如,可以将星上计算类资源、信息处理类资源进行统一划分与管理,形成高性能计算功能区、高速数据处理功能区,实现同一类资源在传统意义上的综合电子分系统、控制分系统、有效载荷分系统等不同分系统间复用,甚至通过星间星内一体化网络,实现资源在不同卫星间共享。
(3)可补加动力体系
推进剂是决定航天器寿命和系统使用效能的关键因素,对地球静止轨道的高价值卫星尤其如此。可维修航天器可补加设计需要进行两方面的适应性改进,一是增加相应的管路、阀门等必要部件,构建可补加的气、液流体通路;二是在星表增加可加注接口,以便与服务卫星构建气液补加通道。管路系统的改进设计与传统推进分系统管路设计基本相同,无特别之处;对于星表可加注接口,视两星加注接口的连接方式不同,主要有两种技术途径。第一种是将可加注接口与航天器对接机构进行一体化设计,在服务卫星与可维修航天器对接的同时,实现可补加接口的同步连接;其特点是气液接口连接方式简单可靠,但要求可维修航天器增加专用对接机构,系统重量增加大,且对接机构占据卫星的一个完整安装表面,影响可维修航天器有效载荷安装,难以在一般航天器上推广应用。这种方案的典型应用是轨道快车计划,如图9(a)所示。第二种无须专用对接装置,仅在被加注航天器上增加推进剂可加注接口,如美国OSAM1(On⁃orbit serving,assembly,and manufacturing 1)项目将于2024 年左右验证的可加注接口[17],见图9(b)。这种方案,加注接口的连接依靠服务航天器利用机械臂操作完成;其特点是可维修航天器为实现可补加能力代价小,不影响卫星原有用途,方便推广应用。设计表明,相比方案一,接口重量代价降低60%以上;其不足是对服务航天器提出了较高要求,但通过服务航天器的系统优化、通过机械臂在推进剂加注与模块更换等任务中的功能复用,可以弥补这一不足。无须专用星间对接装置的在轨加注接口代表了后续技术发展方向,本文变构型可维修航天器采用这一方案。

图9 不同推进剂可补加接口Fig.9 Different propellant refillable interfaces
2.2 可更换功能模块体系
功能模块是可维修航天器接受在轨维修的主要载体。可更换功能模块体系构建的关键是功能模块划分颗粒度合适,以确保维修性和代价兼顾。本文设计的变构型可维修航天器采用两级功能模块体系,一级为舱段级功能模块,如图7 所示,包括能源动力舱、侧舱、顶舱3 种功能模块,根据需要这些舱段可以进行在轨可更换设计;二级为设备级功能模块。二级可更换功能模块主要包括3 类,一类是常规通用型可更换功能模块,如可更换控制力矩陀螺、可更换计算机等,其特点是功能模块接口可以统一设计、功能模块形状比较规则、模块刚度好,方便在轨更换操作;第二类是柔性附件类可更换功能模块,如可更换太阳翼、可更换热控辐射器、可更换热控多层、可更换天线等,其特点是需要针对每类设备进行独立设计,其可更换接口不具有通用性,且功能模块形状复杂、柔性大,对空间机械臂在轨维修操作要求高;第三类是在轨组装构建型功能模块,如可组装桁架结构、机电热一体化可更换卫星舱板等,其主要为满足航天器在轨组装、重构、扩展等需求。
2.3 即插即用接口体系
除体系架构支持外,航天器可修易修的关键是各类接口的标准化和即插即用能力。本文设计的变构型可维修航天器接口体系如图10 所示,包括星间接口、舱段级接口和设备级接口3 类。星间接口主要面向与服务航天器交会连接前的辅助识别与测量,捕获连接阶段的捕获抓持,捕获连接后的推进剂补加、整星检测等用途。舱段级接口主要支持可维修航天器可更换舱段之间的连接与分离、舱段间的信息传输、能源传输,以及必要时的热量交互。设备级接口主要用于实现可维修航天器设备级功能模块的在轨更换,接口即插即用功能主要体现在这一层级。根据设备级功能模块划分的类型,设备级接口包括可更换通用设备接口、可更换专用设备接口与不可更换设备接口3 类。可更换通用设备接口面向常规通用型可更换功能模块,可更换专用设备接口面向柔性附件类可更换功能模块和在轨组装构建型功能模块;不可更换设备接口主要面向在轨不可更换设备,如复杂的网络交换机、射频设备等。对于可更换设备,通过接口设计与系统支持实现可插拔更换与智能化检测管理的双重功能,即实现在轨即插即用;对于不可更换设备,通过接口设计与系统支持实现智能化检测管理功能。
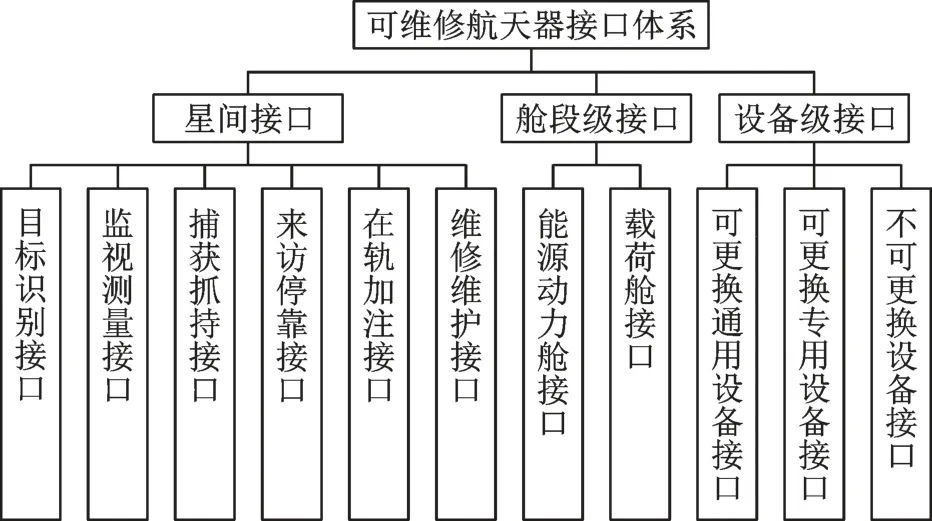
图10 可维修航天器接口体系Fig.10 Interface architecture of maintainable spacecraft
2.4 可维修航天器维修需求
变构型可维修航天器支持推进剂在轨补加、星表和星内模块更换、大型附件辅助展开与更换、舱段更换、在轨组装扩展等几类任务。通过可维修性设计,可以大幅降低维修服务任务对空间机械臂等服务提供方的能力要求。变构型模块化可维修航天器维修操作精度需求分为3 个级别,一级功能模块,维修操作精度优于5~10 mm、2°~3°(绝对定位精度,下同);二级附件类功能模块,维修操作精度优于3~5 mm、1°~2°;二级常规通用型功能模块及其他任务,维修操作精度优于2~3 mm、1°。根据空间机械臂的操作可达范围,可维修航天器顶舱设备维修、大范围组装扩展等任务需要机械臂抓持维修部位附近的捕获抓持接口,两星进行浮动连接;其余任务两星采用固定连接的方式。同时,星表、星内等不同位置设备维修对维修操作路径、维修时间的约束不同;不同附件类的二级功能模块对维修操作工具的需求不同,而其他功能模块一般可由通用末端工具进行维修操作。几类任务对服务航天器的维修操作需求如表2 所示。
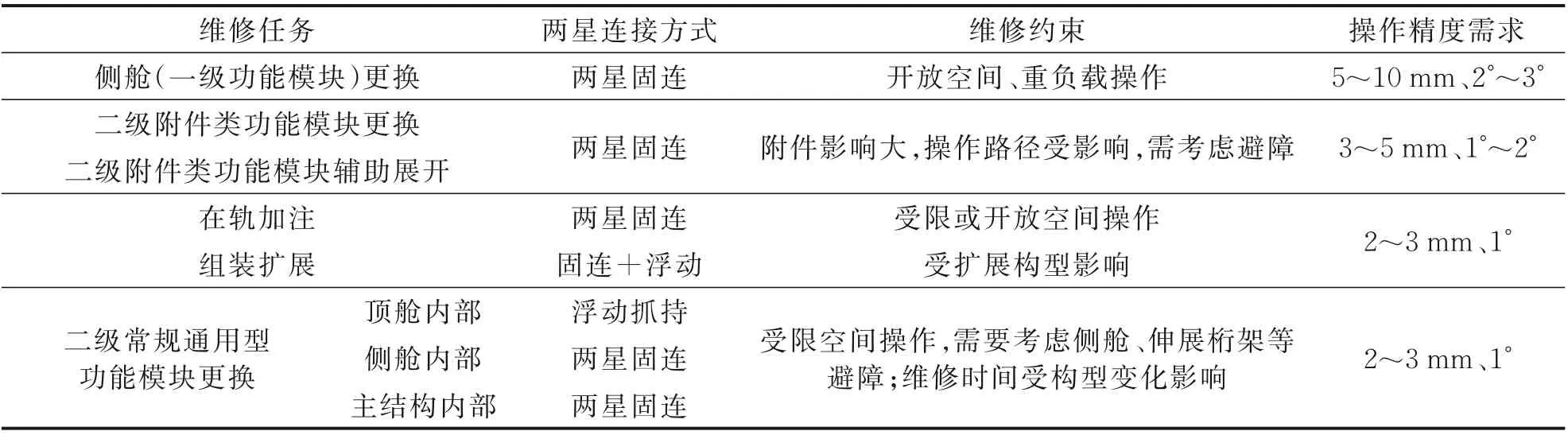
表2 可维修航天器维修操作需求Table 2 Manipulation requirment of the designed maintainable spacecraft
3 可维修航天器关键技术
为了实现兼顾性能先进、代价合理的可维修航天器的发展,从维修性设计、拓扑架构设计以及维修性评价3 方面,对可维修航天器研制需要解决的关键技术进行分析。
3.1 维修性设计技术
航天器的在轨可维修性主要由航天器机械体系架构设计、功能模块化设计确定,前者决定了在轨维修操作通道的大小与操作受限程度,而功能模块的种类和数量则决定了航天器的可维修程度。
航天器机械体系架构设计主要是选择合适的构型与结构形式,满足发射段抗力学环境、航天器功能设备承载、在轨构型维持以及在轨维修操作可达等要求。为了实现在轨维修操作可达,有两种基本技术途径,一是采用开放式构型,各种可更换功能模块和维修部件安装在航天器表面,如MMS 平台、轨道快车“未来星”、ETS⁃Ⅶ试验星等均采用了这种设计;二是采用变构型技术,如哈勃望远镜的开舱门技术、类似SMART Bus 的笼屉式可变构型技术、本文的可伸展变构型技术等。无论采用哪种技术途径,多约束条件下的可维修构型优化设计技术、强适应模块化结构技术、智能化多功能结构技术都是需要解决的关键问题。
航天器功能模块化设计包含模块划分和模块设计两部分,模块划分是模块设计的前提与基础[18]。为了兼顾维修性和实现代价,需要采用合适的方法进行功能模块划分,以打破固有思维的束缚,实现可更换模块内部功能高度聚合、模块之间低耦合。模块设计则是功能模块化的关键,其核心是功能模块接口设计。为支持在轨可维修,功能模块接口设计需要满足空间机械臂捕获抓持、功能模块与航天器本体连接锁定,功能模块与航天器本体进行信息、能源、热量交互等功能需求。根据在轨更换过程中功能模块接口机械连接与其他连接器的作动顺序不同,目前,国内外主要发展了捕获插接锁紧式、插接锁紧式、锁紧插接式3 大类接口[19]。尽管功能模块接口的类型丰富多样,但离在轨实用还存在一定差距,功能模块接口轻小型化技术、机电热信息多功能一体化技术、功能模块接口即插即用技术、能源信息一体化无线传输技术等仍需攻关。
3.2 拓扑架构技术
航天器的技术先进性及其是否可随技术发展而动态演进能力主要由其拓扑架构决定。对于以分布式异构网络为基础构建的可维修航天器,其核心关键技术包括分布式网络技术、系统功能重构技术、分布式能源控制技术、分布式姿态控制技术、自适应热控技术等。分布式网络是整个可维修航天器的电气信息基础,主要包括高速对等信息网络、可变拓扑能源网络和自适应热控网络。系统功能重构技术主要从软件层面或硬件功能软件化层面支持航天器功能动态重构,包括任务自主管理技术、任务迁移技术、标准化信息接口技术、即插即用协议技术、硬件功能软件定义等。分布式能源控制技术是为了解决传统集中式能源供配技术难以支持在轨维修、难以升级扩展的不足,发展的以“能源总线”为核心的能源供配技术,包括供电及供电调节能力集成的一体化能源包技术、智能配电技术、能源下垂控制技术、多端口功率接口技术等。分布式姿态控制技术主要是面向大型航天器的分区、协调控制技术。自适应热控技术则对系统的热收集、热传输、热排散等提出了新要求,需要从可调速流体回路技术、智能涂层技术、可展开热辐射器技术等方面进行攻关。
3.3 维修性评价技术
维修性评价是判断可维修航天器性能设计优劣、可维修代价能否支持航天器可持续发展的关键,主要包括性能评价和效益评估两方面。
对于可维修航天器性能评价,首先需要从可维修性、技术先进性、实现代价3 方面构建综合评价指标体系,建立评价标准。然后,采用合适的评价方法进行设计评价。鉴于航天器系统设计的复杂性,且在某些方面依赖设计经验,设计评价可以采用定性、定量相结合的评价方法,如采用模糊评价方法将专家打分评价、定量计算评价或仿真评价、区间分析等多种手段进行综合,以给出合理的评价判断。
对于效益评估主要从航天器可维修化设计及接受在轨服务的经济价值方面进行分析,以判断可维修航天器能否可持续发展。国内外学者提出了以基于可维修航天器与服务航天器双方为视角的多种经济价值定量分析评价方法[20],为可维修航天器的效能评估提供了参考。对于可维修航天器的效益评估还需要在功能模块可更换设计、推进剂可加注设计、在轨可组装设计等方面开展实例化研究。
4 结论
(1)阐述了国外可维修航天器的技术发展现状,剖析了其技术特点,指出了未发展出实用可维修航天器的技术原因。
(2)提出了以可维修体系架构、可更换功能模块体系与即插即用接口体系为核心的可维修航天器设计方法,设计了一种主结构可变构型的模块化可维修航天器,其对维修操作方要求低、容易维修维护,且系统功能性能可随技术发展而动态演化发展。
(3)变构型模块化可维修航天器的异构分布式网络、两级功能模块体系和三级接口体系,突破了传统航天器功能划分的束缚,在系统层面可实现功能复用、在功能模块层面模块划分颗粒度适度,在实现可维修能力的同时代价较小。
(4)从维修性设计、拓扑架构设计、维修性评价3 方面分析了可维修航天器的主要关键技术,阐述了其技术内涵与现状,指出了后续攻关方向。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
软件导刊(2016年9期)2016-11-07 21:35:42
通信电源技术(2016年5期)2016-03-22 01:09:49
石油知识(2016年2期)2016-02-28 16:20:16
自动化仪表(2015年11期)2015-04-01 01:02:40
