干线公交优先下的相位快速补偿机制研究
2022-03-15 09:14树爱兵刘明刘小高
交通运输工程与信息学报 2022年1期
树爱兵,刘明,刘小高,3
(1.公安部交通管理科学研究所,江苏无锡 214151;2.浙江大华技术股份有限公司,杭州 310051;3.同济大学,交通运输工程学院,上海 201804)
0 引言
公共交通是改善城市交通拥堵的有效途径,高效的公交服务需要有效的公交信号优先控制方法。目前国内外关于公交优先的研究多数聚集在单点和干线场景上,结合文献[1,2]的相应观点和研究成果,公交优先控制策略被分为被动优先策略、主动优先策略和实时优先策略,这一分类结果被广泛接受。干线公交信号优先控制是单点公交优先的延伸与提高,能够在最大程度上保障干线系统中社会车辆的通行效率,维护整体干线系统的运行状况,为公交车辆争取一定的优先权,减少停车次数与延误,改善公交的服务水平。
已有研究中关于搭建干线公交优先框架的方法较为相似,常常基于干线绿波带约束将优先策略嵌入到干线协调控制算法中,比如绿灯延长、红灯早断等主动优先策略[3,4]。王殿海等[5]提出了干线公交信号优先的双层优化方法,基于检测器数据优化上层的干线协调方案参数,在维持社会车辆干线绿波的基础上,在下层采用绿灯延长、红灯早断等策略为公交车辆提供优先信号。郑启明[6]尝试了在干线协调控制中插入公交专用相位,并且以多种策略缓解插入相位产生的负面影响,结果表明在一定条件下实施插入策略能够提高信号优先效果、保障干线系统的整体通行效益。Dai等[7]和许明涛[8]考虑到公交车辆的运行特征,在干线系统中以公交站点为节点设计了分段式干线公交绿波算法。前者认为每一段的绿波都只受区域内的交叉口影响,不同段的绿波对社会车辆产生负影响,因此建立了一个综合考虑公交绿波与社会车辆绿波的干线协调控制算法。后者将干线信号协调控制与公交优先策略相结合设计了双层规划算法,上层主要优化了分段式的站间干线绿波,保障干线车辆的交通需求;下层是在不破坏协调相位绿波带的条件下,以绿波带宽、上下限等参数为约束优化公交信号控制方案。
另外,多数研究考虑到时刻表和站点停靠等因素对干线公交优先控制效益产生的影响,通过构建基于不同指标体系[9,10]的目标函数来优化信号优先控制算法或者评价信号优先效果。Li 等[11]考虑了公交车辆的晚点情况,以干线系统人均延误最小为目标进行优化建模,并以背景绿灯时间为权重压缩或者延长非协调相位来实现公交优先。戴光远[12]以整个干线交通的效益最大为目标,考虑了停靠时间在一定范围内的随机波动对干线公交绿波的影响程度,设计了两种车型绿波带并存的优先控制方案。Han 等[13]尝试求解出公交优先时的最佳绿灯长度,首先基于预告检测器数据评价公交车辆的延误,然后结合其他相位的延误构建二次规划函数量化因绿灯压缩而受到的交通负影响,最后综合选择最优的优先控制方案。
在为干线中的公交车辆实施优先时,常会压缩或者侵占非协调相位的绿灯时间,因此需要在信号控制恢复到背景方案前补偿非协调相位,保障社会车辆的基本效益。Liao 等[14]综合考虑公交晚点与载客量情况、实施优先所需要的绿灯时间,设计了有条件的公交优先控制逻辑;在实施优先的周期内不考虑干线协调的运行效果,当满足触发条件时在下一个周期为非协调相位进行补偿。马万经等[15]基于公交运行时刻表建立了干线协调控制下绿灯的补偿方法,为晚点到达的公交车辆实施优先,并对非协调相位进行选择性补偿;为早点到达的公交车辆采取增加延误的信号控制措施,并利用多余的绿灯时间对非协调相位进行补偿。王杉[16]通过分析公交优先与背景干线控制方案的冲突关系,建立了基于红灯早断、绿灯延长以及驻站控制等措施的干线协调与公交优先协调控制框架,在不破坏干线绿波带的前提下实现公交信号的绝对优先,并根据绿灯压缩比对非协调相位均匀补偿。别一鸣等[17]设计以绿波带宽为约束条件的公交信号优先控制模型时,以非协调相位的流量比为权重对各相位的绿灯时间进行压缩,并且考虑在绿波带受到冲击的运行周期后压缩协调相位来补偿非协调相位。
现有关于干线公交优先的研究,往往采用简单的绿灯补偿方法,即是将给予优先和进行补偿的周期分离,在提供优先后锁定下一周期,并且将协调相位的可压缩绿灯时间均匀分配给其他相位。简单的绿灯补偿方法虽然能够在一定程度上弥补非协调相位的损失时间,但是容易导致各相位的绿信比变化较为剧烈,而且各个相位所需要的补偿量超出协调相位所能给予的最大压缩量时,无法有效地恢复各个相位的绿信比。为实现精细化的干线信号控制方案,本文则将公交优先策略与绿灯补偿相结合设计了干线快速补偿机制。在实施优先的同时对非协调相位进行补偿,将非协调相位的压缩量与补偿量有效分散至数个周期内的各个相位,改变简单的绿灯补偿中独立执行优先方案和补偿方案的控制方式。因此在保障快速恢复绿波状态的同时,更加高效地补偿相位,减轻对社会车流产生的交通负影响。
1 干线协调下信号控制模型
为了实现干线协调下的公交车辆优先通行,本文首先对公共周期、相位差、绿信比等参数进行优化,设计了无公交优先时的干线协调背景方案,然后采用多步检测机制逐步获取公交车辆的运行状态信息,精确预测公交到达停车线的时间,从而制定基于绿灯延长、红灯早断等优先策略集的公交信号优先方案。考虑到干线非协调相位的绿灯需求,在确保不破坏干线绿波带和满足最大绿灯时间、最小绿灯时间和最大红灯时间等边界约束条件的前提下,寻找满足公交优先通行的有效绿灯区间和协调相位的起止时刻移动量,同时利用灵活绿灯时间同步补偿非协调相位,实现公交信号优先方法和非协调相位的绿灯补偿同步协调,建立干线协调下的相位快速补偿机制。模型控制框架如图1 所示。根据公交优先策略将其划分为绿灯延长策略和红灯早断策略下的快速补偿。干线快速补偿机制是将因实施公交优先而产生的绿灯压缩量或者延长量,有效分散至数个周期内的各个相位,改变简单的绿灯补偿中选定一个周期用于压缩、下一个周期用于补偿的控制方式。在当前的公交优先方案结束前,不接受其他的优先请求。因此在保障将干线系统快速恢复到背景控制方案的同时,尽可能地弥补被压缩相位的损失时间,改善因独立运行优先和补偿方案而导致绿信比剧烈波动的情况。
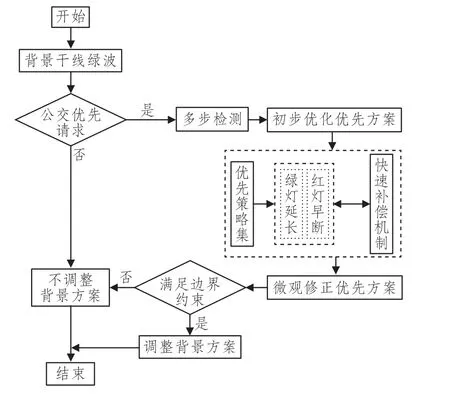
图1 公交优先控制模型框架
1.1 干线协调方案参数优化
1.1.1 单点配时方案设计
干线中各个交叉口采用传统四相位控制方式,第一相位是协调相位。采用韦伯斯特法[18]计算配时方案,选出最大的周期长度作为公共周期,Cmax= max(Ci),此单点为关键交叉口,即:

式中:gij、Gij分别是单点i处相位j的有效绿灯时间、显示绿灯时间,s;A是黄灯时间,s;tL是启动损失时间,s;yij是单点i处相位j的流量比。
(2)相位差与绿波带宽
本文采用数解法[19]寻找干线系统中最优的相位差,并计算双向绿波带宽。数解法是以各个实际信号与理想信号的最大挪移量为目标,选取最小的目标值作为最优相位差。
1.2 干线协调下公交优先方法
对于干线中行驶的公交车辆,在不破坏干线绿波带的前提下,采用多步检测机制获取公交专用道上的公交运行状态信息,并采用绿灯延长、红灯早断等优先策略集满足公交车辆的优先需求。
1.2.1 公交多步检测
在公交专用道上设置检测器来收集公交信息,预测其到达停车线的时间。考虑到公交车速的波动性,在进口道设置两个公交检测器,按照期望、最快、最慢车速(v0,vfast,vslow)计算理论行程时间(t0=d v0)与误差范围(Δt=d vslow-d vfast),如图2所示。预告检测器布设较远,可以初步预测到达时间,确定相应的优先策略;确认检测器较近,能够更加精准地预测到达时间范围,微观修正优先控制方案。根据工程经验和本文实例中的交叉口间距与站点位置约束,可将预告、确认检测器分别布设在停车线前300 m、100 m[20]处,驶离检测器设在停车线后,实现公交优先的闭环控制。
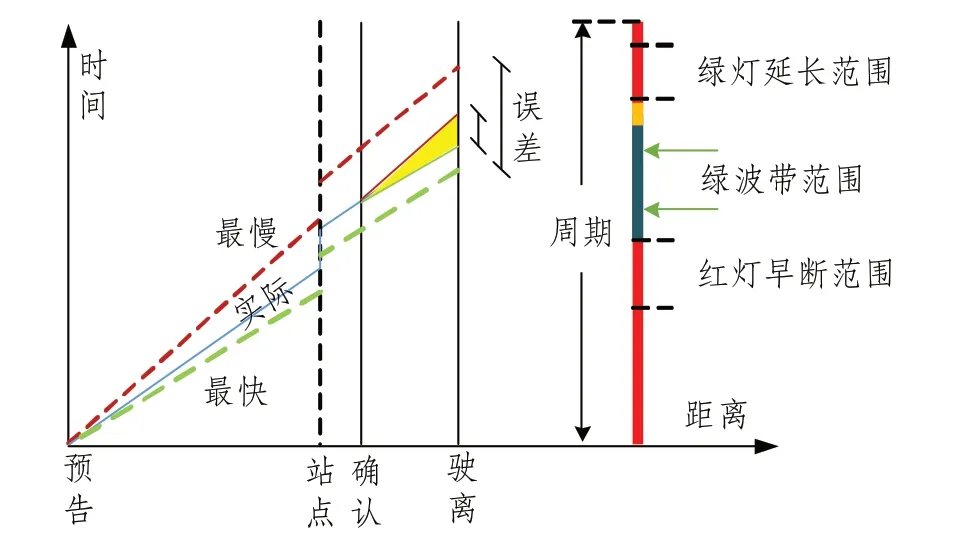
图2 公交多步检测
1.2.2 公交优先实现方法
在干线协调下实现公交优先,必定不能破坏原有的绿波带,以免造成较大的交通负影响。本文在固定配时背景下设计的公交优先算法,是在满足绿波带宽、上下限等约束的条件下,通过调整协调相位的启亮、关闭时刻与绿灯长度,为公交寻找不停车通过的机会。各相位的可移动范围如图3所示。
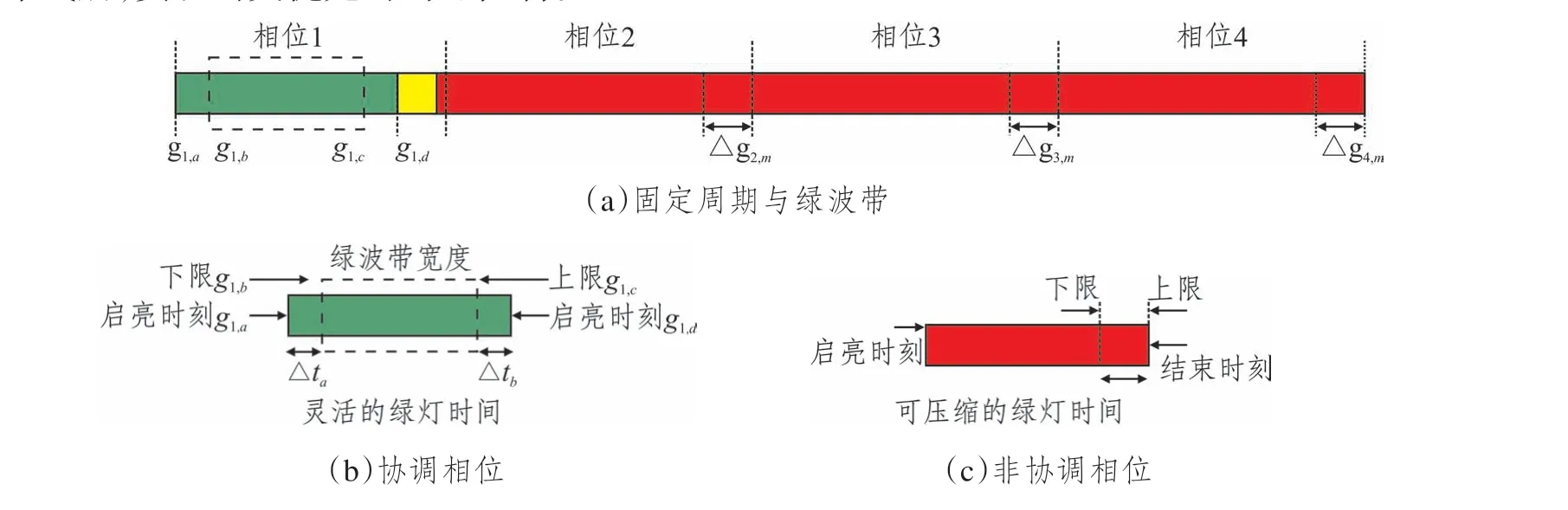
图3 干线协调控制中各相位的可压缩时间
为了维持固定周期下干线绿波的稳定性,无论如何调整配时方案,都要保证协调相位中绿波带的宽度、起止时刻g1, b和g1, c是固定的。实施公交优先时协调相位的启亮时刻g1, a不晚于绿波带下限时刻g1, b,结束时刻g1, d不早于上限时刻g1, c,以及绿灯长度不小于绿波带宽。协调相位中绿波带上下限范围之外的绿灯时间则是灵活的,可以根据公交的实际到达情况调整协调相位的起止时刻与长度。通过适量地压缩非协调相位并分配给协调相位,使得协调相位启亮时刻、结束时刻和绿灯长度是具有一定的灵活性。对晚到的公交车辆采用绿灯延长策略,推迟协调相位的结束时刻、延长绿灯长度;对早到的公交车辆采用红灯早断策略,提前协调相位的开始时刻、增加绿灯长度。
(1)相位压缩机制
最大可压缩时间Δgj,m为:

单点i处,总损失时间和总流量比分别是L、Y。采用等饱和度原则将非协调相位j的饱和度压缩至0.9[5],压缩前后的绿灯时间差值即相位j的最大可压缩时间△gj,m,是协调相位为实现优先控制可以灵活挪动的时间。实际中要根据公交的到达情况以及优先策略,判断最大限度压缩非协调相位时是否满足公交优先通行所需要的绿灯时间。如果其超出了最大可压缩时间,则无法优先;如果满足实际需要的绿灯时间,则根据各相位的实际绿灯时间等比例压缩,确保各相位的绿信比稳定变化。
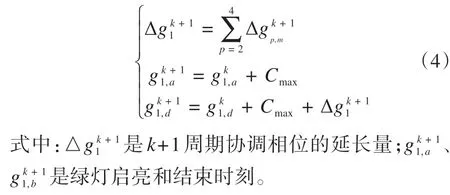
(2)绿灯延长
当预告检测器在周期k的非协调相位j或k+1周期的协调相位期间检测到公交时,预测其在k+1周期协调相位的绿灯结束后才到达停车线,则采用绿灯延长策略。在不破坏绿波的条件下,最大限度压缩k+1周期的非协调相位,则协调相位最大延长时的参数为:
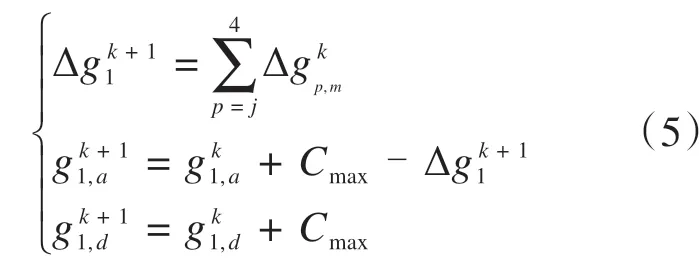
(3)红灯早断
当预告检测器在k周期的非协调相位j检测到公交时,预测其在k+1周期协调相位的绿灯尚未开启时到达停车线,则压缩尚未完成的非协调相位,提前启亮协调相位。在不破坏绿波的条件下,最大限度压缩k周期的非协调相位,则协调相位最早启亮时的参数为:
1.3 相位快速补偿机制
在干线协调基础上实施公交优先,无论是绿灯延长还是红灯早断策略,都会压缩非协调相位,对非协调方向的交通流产生负面影响。为了平复公交优先对干线协调控制的干扰,使其快速恢复到无公交车辆到达时的绿波状态,本文结合主动优先策略和绿灯补偿设计了干线相位快速补偿机制。
以往方法中常常是在公交优先实行后借助下一个周期单独实施绿灯补偿,从而尽可能地弥补被压缩相位的损失时间,但是采用一个周期来平衡各股车流绿信比的压力比较大,相应的相位延长量与压缩量的变化也会较为剧烈,不利于干线系统的稳定运行。本文建立的干线快速补偿机制,考虑基本绿波带和相位压缩机制,分析协调相位中给予公交优先通行的有效绿灯区间和起止时刻移动量,利用灵活绿灯时间同步补偿非协调相位,建立绿灯延长和红灯早断策略下的快速补偿机制,达到最大限度均衡各相位绿信比的目的。公交优先策略可划分为绿灯延长策略和红灯早断策略下的快速补偿。以绿灯延长策略为例,如果延长k+ 1 周期的协调相位实现优先,一方面压缩k+ 1 周期的非协调相位,推迟协调相位的结束时刻;另一方面压缩协调相位起点至绿波带下限,并为k周期未完成的非协调相位进行初步补偿,同时调整k+ 2 周期协调相位的起止点再次补偿非协调相位。其本质是将因优先而产生的绿灯压缩量或者延长量,有效地分散至优先运行时各个周期的各个相位,改变简单的绿灯补偿方式中选定一个周期压缩、下一个周期补偿的方式,达到短期内最大限度地改善各个周期各个相位绿信比波动的目的。
1.3.1 绿灯延长策略的快速补偿机制
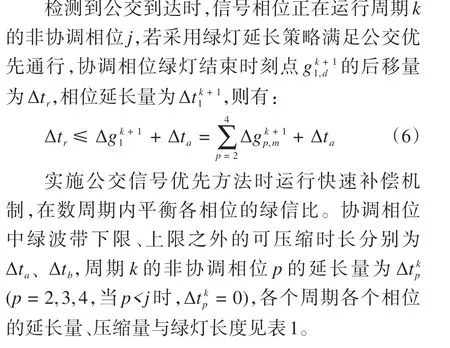
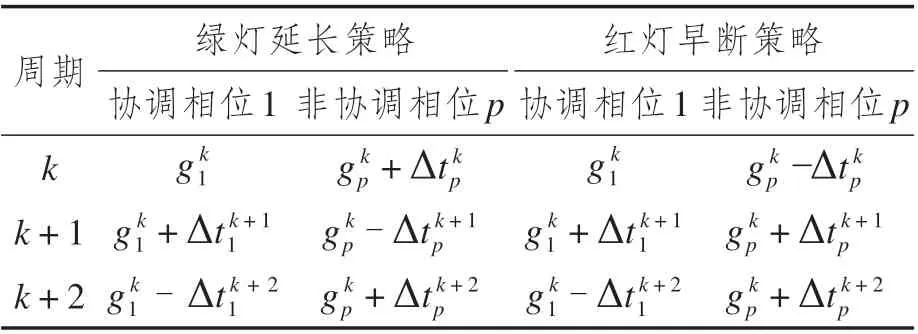
表1 两种优先策略下的绿灯时间表
若检测到公交到达时,信号相位正在运行周期k+1的协调相位,其计算方法同理。绿灯延长策略下,具体的快速补偿机制如下:
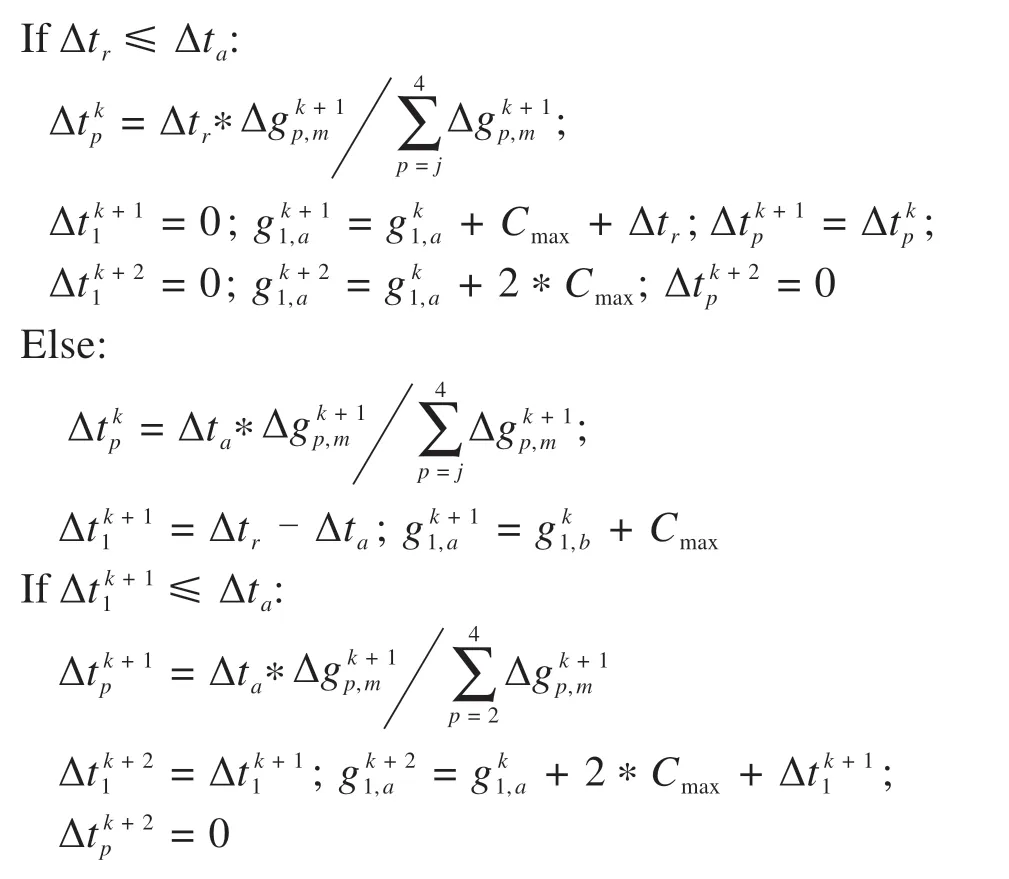
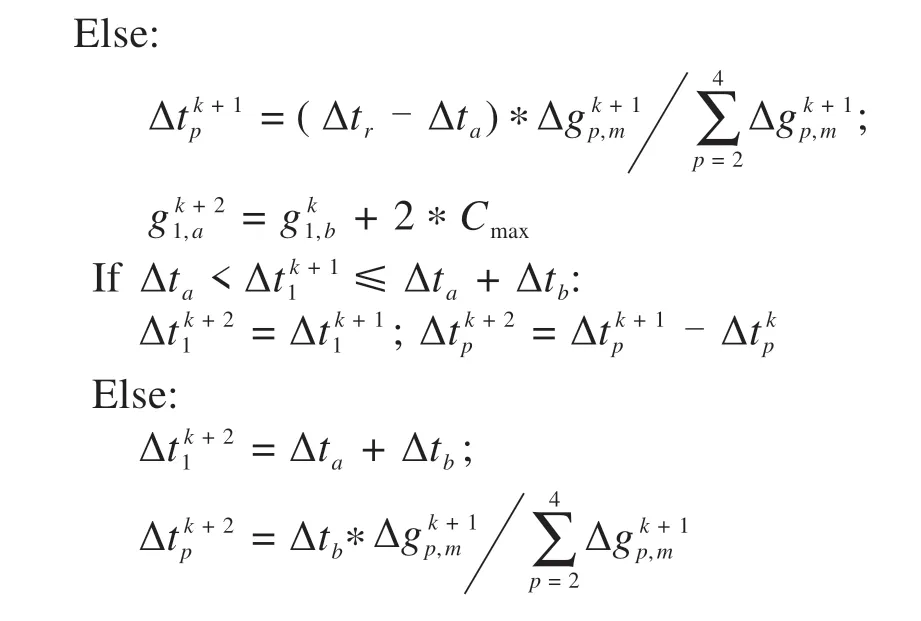

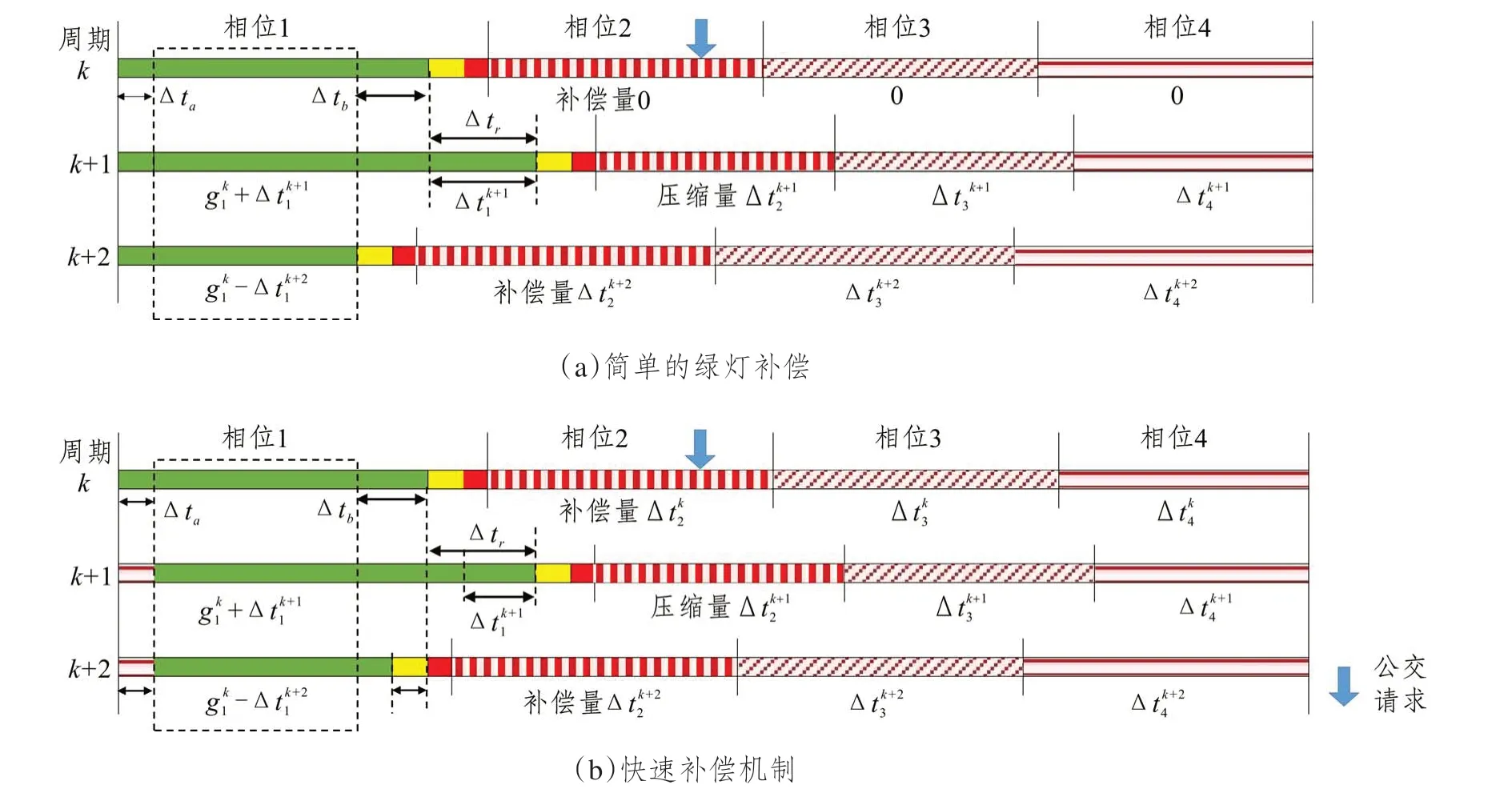
图4 绿灯延长策略的快速补偿机制
1.3.2 红灯早断策略的快速补偿机制
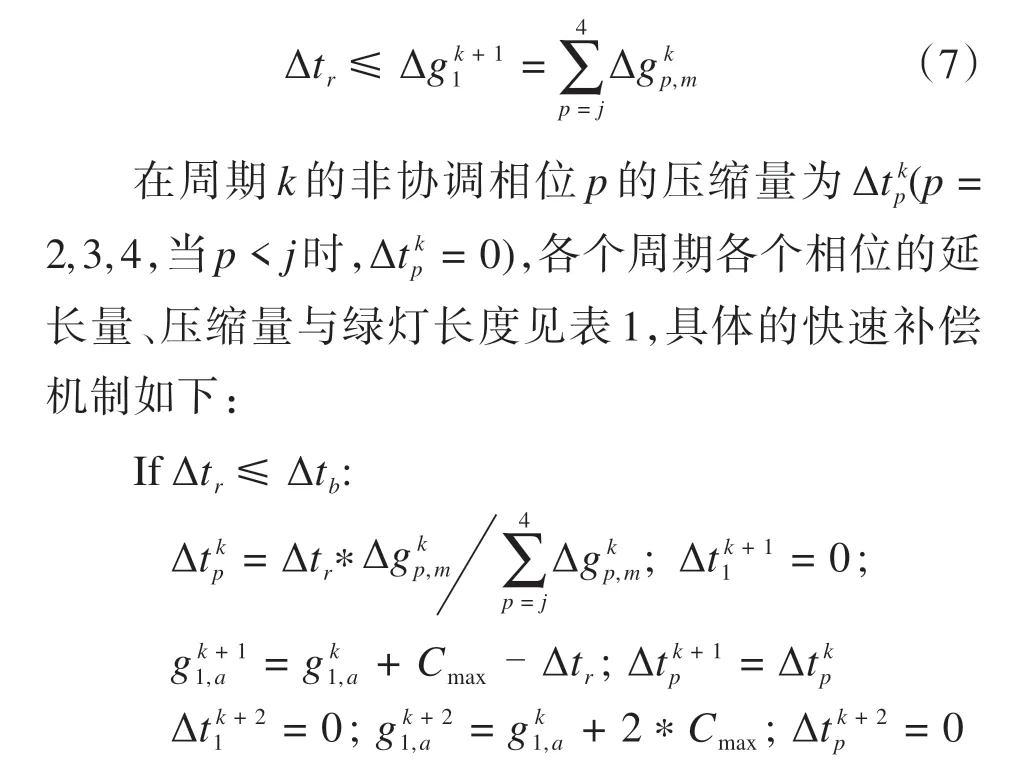
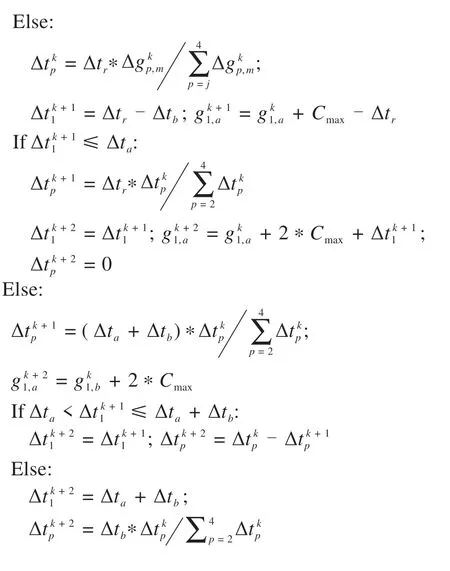


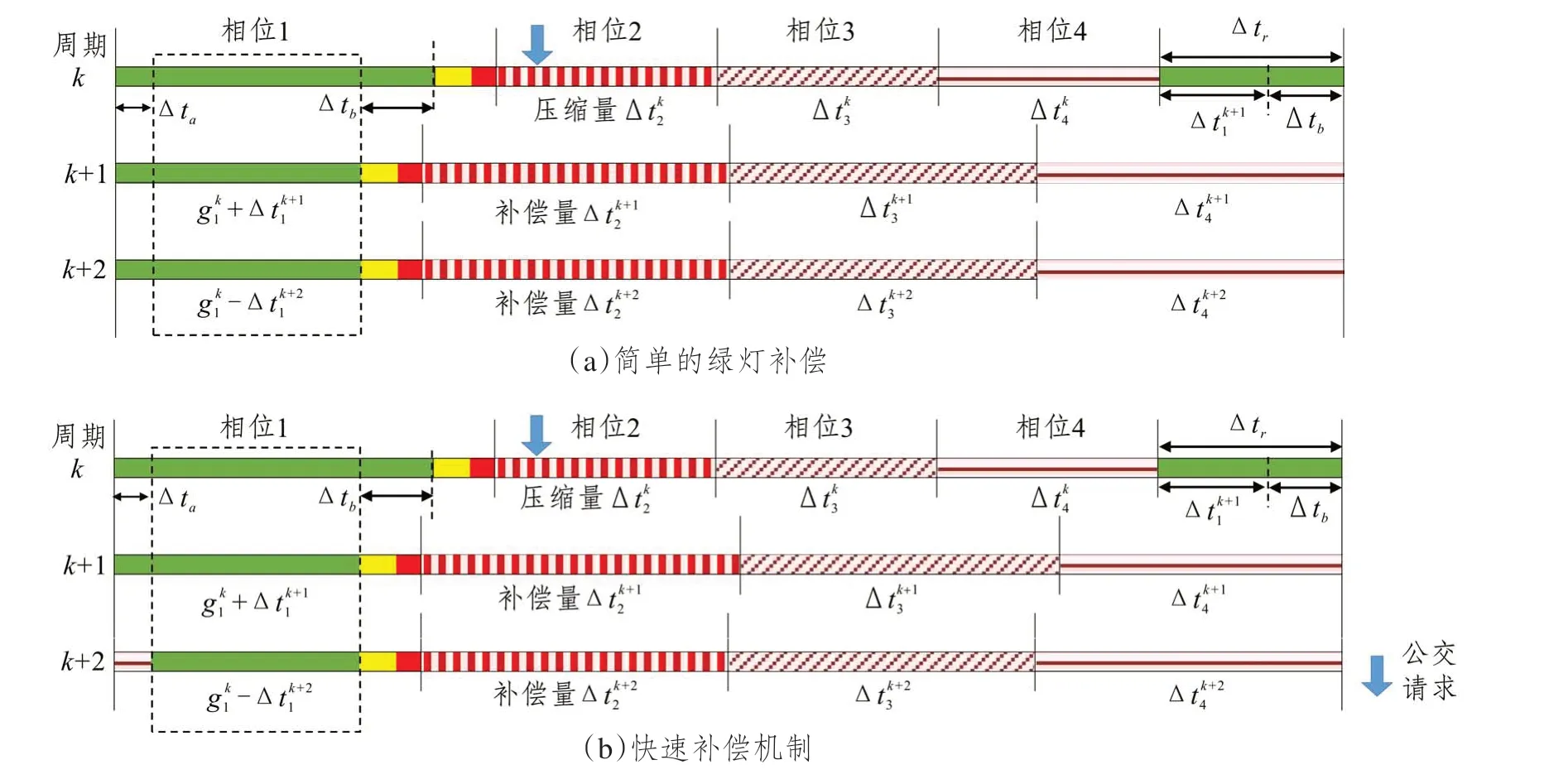
图5 红灯早断策略的快速补偿机制
2 实例与仿真
2.1 仿真场景建立
2.1.1 实证场景
为了评估干线快速补偿机制的有效性,本文以如图6所示的杭州市海达南路与学林街、金沙大道、天城东路组成的干线为例进行验证。各单点均采用四相位控制,相序为主路直行、主路左转、次路直行、次路左转,流量如表2 所示。干线直行上有公交专用道,交叉口间距是650 m、490 m,车道宽度为3.5 m , 站点距离L1、L2分别为350m、70m,三个检测器的距离L3、L4、L5分别是300m、100m、5m。主路车速40km·h-1;公交车速符合正态分布v=N(36,32),上下限vslow,vfast分别是30 km·h-1,42 km·h-1;其车辆编号与发车时间间隔分布如图7所示,波动范围在300~400 s 之间;站点处停车时间由上下客流量决定。
图6 海达南路干线示意图
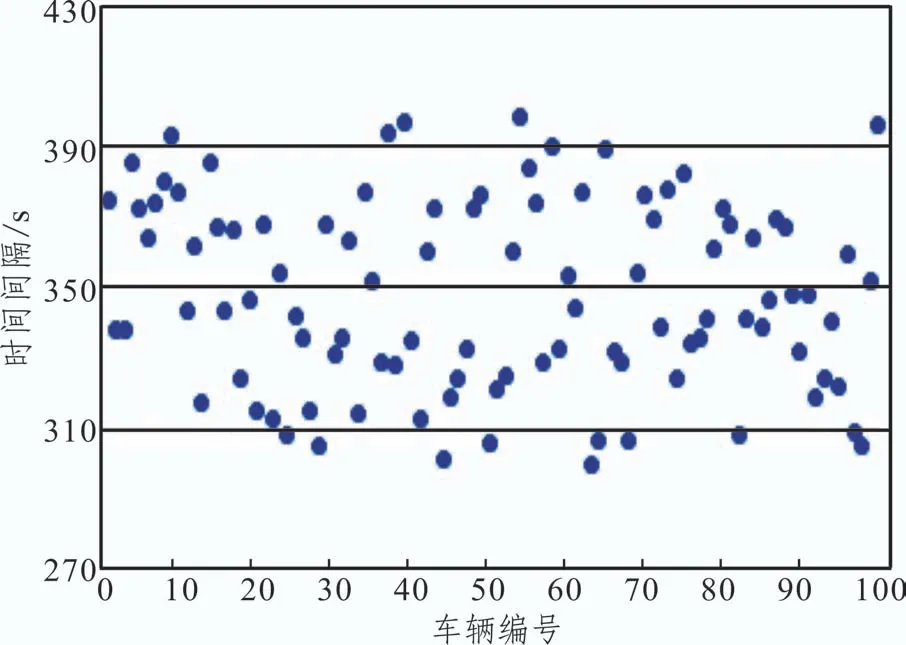
图7 公交发车时间间隔
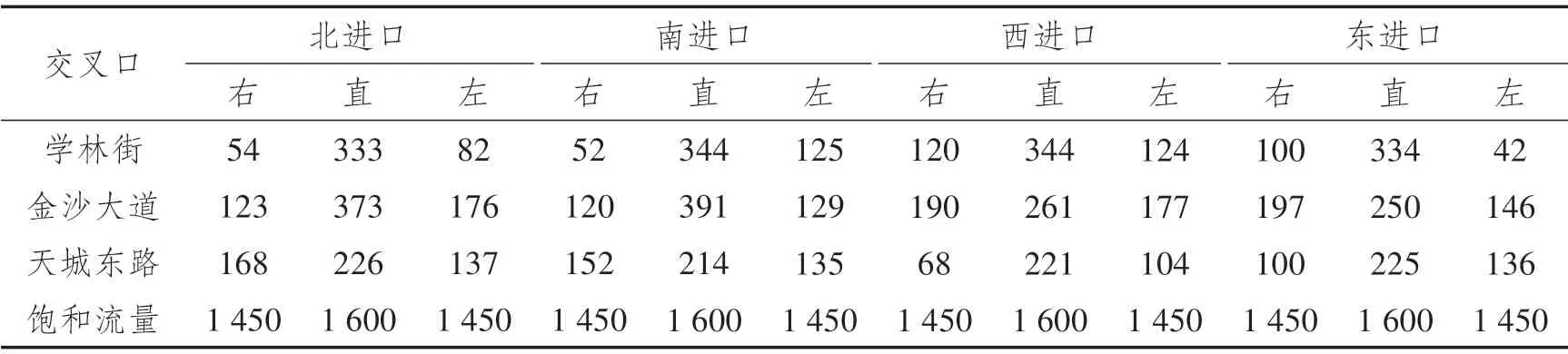
表2 干线交叉口各进口道流量(单位:veh/h)
根据背景控制方式、公交优先模块与干线相位快速补偿机制,本文设计了四种控制方案。在VISSIM 仿真平台上根据渠化信息和路网流量数据搭建干线路网,设置全局路径确保仿真运行状态接近实际场景,借助车辆感应逻辑编程VAP 模块(Vehicle Actuated Programming)编辑基于相位的仿真运行控制程序,根据路网中的车辆、灯组、检测器等实时信息制定干线系统的配时方案,最终实现本文设计的四种仿真控制方案:
方案1 单点定时控制,不支持公交优先、多步检测和干线相位快速补偿机制;
方案2 干线协调控制,不支持公交优先、多步检测和干线相位快速补偿机制;
方案3 干线协调控制,支持公交优先、多步检测,简单的绿灯补偿;
方案4 干线协调控制,支持公交优先、多步检测,干线相位快速补偿机制。
2.1.2 参数标定
为对比分析四种控制方案下的通行效益,采用2021 年01 月21 日11:00~14:00 期间的数据进行仿真验证。首先,设计单点配时方案;然后,选定金沙大道为关键交叉口进行干线协调,公共周期Cmax为100s。学林街、金沙大道与天城东路三个路口的相对相位差分别为50s、0s、53s;交叉口饱和度分别为0.78、0.81、0.59;由北向南、由南向北的干线绿波带宽分别为21s、20s;总压缩量分别是12 s、7 s、23 s。以学林街为例,由北向南、由南向北的协调相位灵活绿灯时间分别为8 s、9 s,相位2、3、4 的最大压缩量分别是3 s、6 s、3 s,协调相位的最大延长量即非协调相位的总压缩量为12 s,协调相位的绿波带不可破坏。各个交叉口的时间参数以及最终干线协调配时信息如表3所示。
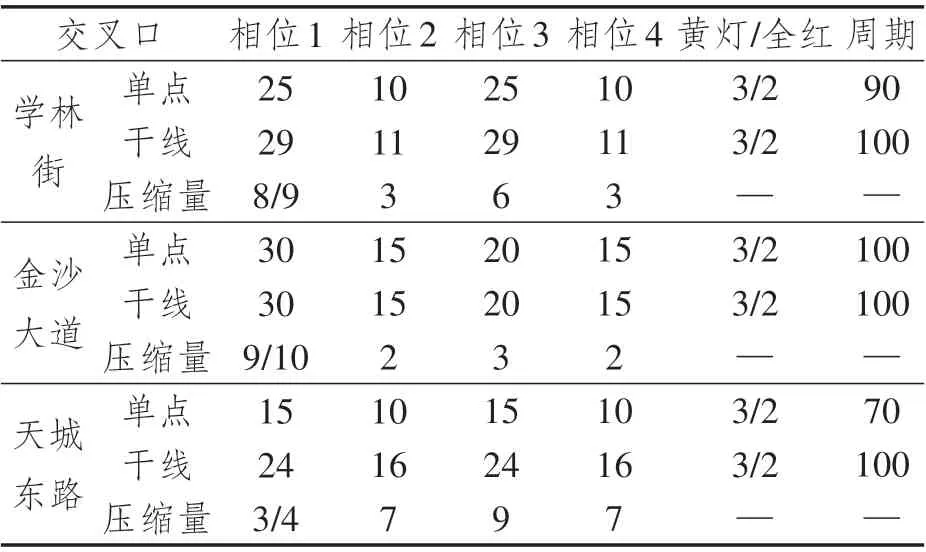
表3 干线交叉口信号配时信息(单位:s)
2.2 结果分析
本文将干线系统平峰时期数据输入到VISSIM 路网中,统计仿真结果,计算四种控制方案下的延误、公交优先成功率、平均排队长度和相位变化量,分析公交优先和相位快速补偿机制的效益。
2.2.1 延误与优先成功率分析
采集各个交叉口以及整个干线系统的车均延误、公交延误,根据单点处的公交延误与停车情况,统计公交顺利通过各个交叉口的频率,记为公交优先成功率,对比分析四种控制方案下的运行效果,如表4 所示。整体来看,方案2 的干线协调方案的通行效率显著优于方案1的单点控制,其中社会车辆和公交车辆的车均延误均减少20%以上。公交车的通行效益受站点影响较大,学林街与金沙大道之间的站点妨碍了公交与干线绿波的协调,导致延误和优先失败率分别增加了34%、18%;天城东路上游没有站点,很大程度上保障了公交与绿波的协调性,优先成功率由25%提高到78%。
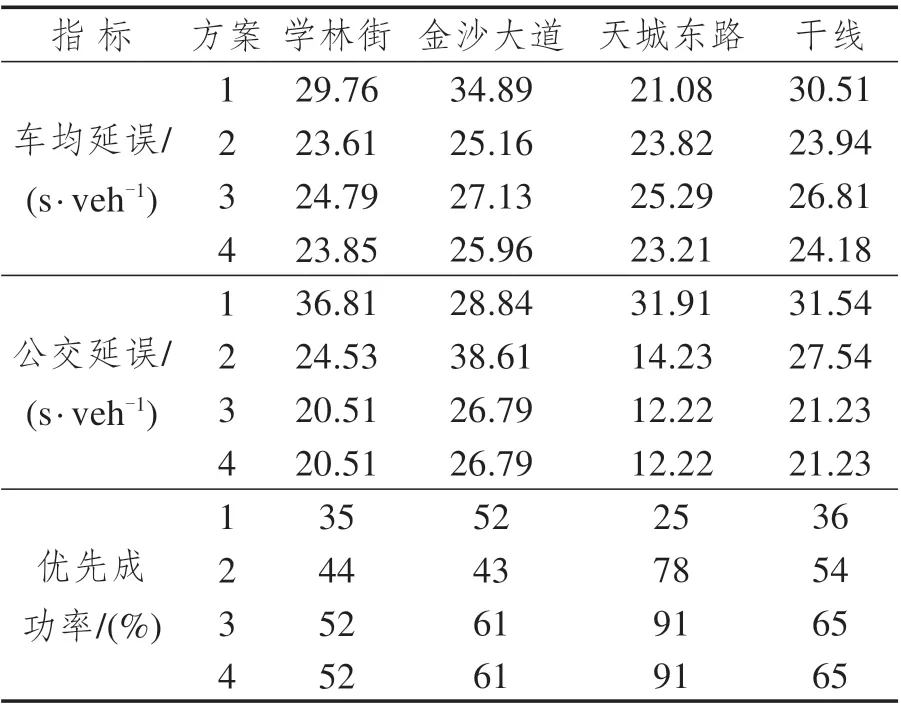
表4 四种控制方案的延误与优先成功率
方案3 在干线控制中引入了公交优先模块和简单的绿灯补偿,公交延误和优先成功率分别优化了30%和20%。其中金沙大道处的改善效果最为显著,主要由于公交优先的实施减少了因在上游站点驻车而错过干线绿波所产生的停车行为,最终公交延误减少了31%,并且优先成功率提高了18%。但是各单点处社会车辆的车均延误明显增加,整个干线系统的延误由23.94s增加至26.81s,提高了12%,表明方案3无法有效弥补非协调相位的损失时间。方案4 采用了干线相位快速补偿机制,能够在维持优先成功率为65%与公交延误为21.23 s的状态下,将社会车辆的车均延误由26.81s降低至24.18s,接近无优先时方案2 延误为23.94s的水平,验证了快速补偿机制能够充分地补偿各个相位的绿灯损失时间,维持绿信比稳定在无优先时的状态,均衡干线中社会车辆的通行效益。
2.2.2 平均排队长度分析
通过统计一个流向在每个仿真步长中的排队长度,计算一个时间间隔内的平均值作为该流向的平均排队长度。本文以10min为时间间隔,选取各个流向以及干线的平均排队长度指标,对比分析四种控制方案下整个仿真控制期间的排队情况,如表5所示。与方案3相比,方案4减少了大部分流向的平均排队长度,主路左转、次路直行、次路左转分别减少了12%、8.3%、15%,整个干线系统的平均排队长度缩短了11%,接近无优先时平均排队长度10.2 m 的干线控制效果,有效弥补了各流向损失的绿灯时间,减弱公交优先对干线协调的交通负影响。
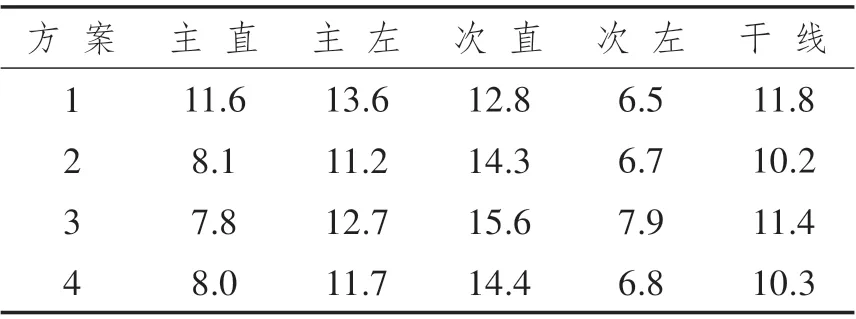
表5 四种控制方案的平均排队长度(单位:m)
2.2.3 绿灯时间变化分析
以学林街为例,选取各相位的平均绿灯时间、执行公交优先时压缩或拉伸的相位数量以及相应的相位平均变化量三个指标,分析公交优先对配时方案的影响,如图8 所示。整个仿真过程中,基于当前的公交到达情况,方案4的各个相位被改变的频数明显高于方案3,但是其平均绿灯时间变化均匀,明显更接近干线背景方案2。针对被压缩或者拉伸的相位,方案4 中其波动性较弱,其中协调方向的优化效果最为显著,相位平均变化量只有0.5 s。这说明干线快速补偿机制能够更加有效地缓解公交优先措施下相位调整的激烈程度,一定程度上减弱了公交优先对干线协调控制的交通负影响。
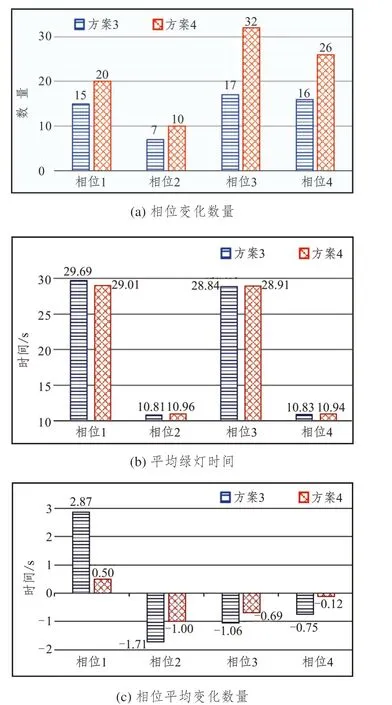
图8 快速补偿机制下学林街的相位变化
3 结论
本文以杭州市海达南路与学林街、金沙大道、天城东路交叉口为研究实例,针对干线系统中公交信号优先影响非协调方向交通流效率这一问题,提出了融合主动优先策略和绿灯补偿的干线快速补偿机制。与简单的绿灯补偿相比,干线快速补偿机制在维持基本的干线绿波带前提下,将协调相位实施公交优先和非协调相位实施绿灯补偿同步进行,充分利用了协调相位的灵活绿灯时间来平衡各股车流的绿信比,缓解了传统方法中在下一个周期内独立地补偿被压缩相位的压力。仿真结果表明快速补偿机制不仅将社会车辆的车均延误由26.81s 降低至24.18s,而且有效改善了各个相位的绿灯长度波动情况,对干线协调控制中实现公交优先具有积极作用。
本文仅针对该干线中的平峰情况进行验证,没有考虑交通流状态处于不同饱和度时的适用性,以及干线中存在多条公交线路时的复杂情况,后续将会针对上述问题展开研究。
猜你喜欢
汽车实用技术(2022年3期)2022-02-23
作文周刊·小学一年级版(2020年40期)2020-10-19
东坡赤壁诗词(2019年5期)2019-11-14
中国航海(2019年2期)2019-07-24
东坡赤壁诗词(2019年3期)2019-07-05
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
筑路机械与施工机械化(2015年11期)2015-07-01
筑路机械与施工机械化(2014年10期)2014-03-01
中国火炬(2010年5期)2010-07-25
中学生百科·小文艺(2009年8期)2009-11-24