无人机协助边缘计算的能量收集MEC系统资源分配策略
2022-03-15 00:39陶丽佳赵宜升徐新雅
南京邮电大学学报(自然科学版) 2022年1期
陶丽佳,赵宜升,徐新雅
(1.福州大学物理与信息工程学院,福建 福州 350116 2.福州大学福建省媒体信息智能处理与无线传输重点实验室,福建 福州 350116)
射频(Radio Frequency,RF)能量收集是一种可从环境RF信号收集能量的技术,能为用户设备持续地提供能量[1]。然而,由于存在信号的衰减,用户在短时间内收集的能量较少。如何充分利用收集到的有限能量,是保证系统性能的关键。移动边缘计算[2](Mobile Edge Computing,MEC)可以将用户的计算任务卸载给计算能力更强的边缘服务器,能够显著减少用户的能量消耗。另外,通过设计资源分配优化策略,可以高效使用收集的能量。因此,研究结合MEC的能量收集系统的资源分配问题,对提升系统性能具有重要意义。
能量收集MEC系统的资源分配问题已经引起了极大的研究兴趣。文献[3]利用基站(Base Station,BS)作为RF源,为具有RF能量收集功能的单用户提供能量,该BS也可为此用户提供MEC服务,用户使用收集到的能量进行本地计算或将任务卸载至BS,在用户能量收集和时延的约束下,以最大化用户给定任务计算成功的概率为目标。文献[4]在支持非正交多址的MEC无线供电系统中,建立非线性能量收集模型为用户提供能量,分别在部分和二进制卸载模式下,联合优化能量收集时间、计算频率、用户卸载次数和用户传输功率,使用户计算速率最大化。文献[5]将两个用户的无线MEC系统节能卸载和资源分配问题结合,基于时分多址机制下的收集⁃卸载协议,首先考虑保证用户的公平性提出了能源效率最大化,然后针对“双重远近”问题,提出了用户协作方案,离MEC服务器近的用户可以利用其收集到的能量,将远距离用户的任务转发到此边缘服务器,实现能量效率最大化问题。文献[6]研究了具有射频能量收集的多用户MEC系统中的能量管理问题,在带有电池队列稳定性和服务质量的约束下,将能量消耗最小化问题转化为随机优化规划问题,提出了一种基于李雅普诺夫的集中式能量管理算法。文献[7]研究了由一个接入点、多个移动设备和一个恶意窃听者组成的具有物理层安全的MEC系统,在保证计算任务成功完成和满足安全卸载约束的前提下,建立了关于本地计算和卸载计算的能耗模型,提出了能量消耗最小化的资源分配策略。文献[8]提出一种无人机(Unmanned Aerial Vehicle,UAV)支持的MEC系统资源分配框架,利用UAV为用户提供MEC服务;通过联合优化卸载时间、计算频率、用户发射功率和UAV轨迹,实现计算效率最大化。文献[9]研究了一种由多UAV辅助的多接入MEC模型,通过允许用户将任务卸载至UAV的多个MEC服务器上进行并行计算,从而使用户和UAV的能量消耗最小化。文献[10]中UAV为多个小区的边缘用户提供服务,考虑了UAV作为移动BS和地面BS之间存在的干扰,利用轨迹优化使UAV远离地面BS服务的用户,以减少干扰的影响;联合优化了UAV卸载时长和UAV轨迹,以最大化边缘用户吞吐量为目标。然而,现有研究假设边缘服务器有足够的计算资源,没有考虑到用户请求的计算任务超出边缘服务器计算能力的情况。当用户的计算任务超出边缘服务器计算能力上限时,如何为用户继续提供边缘计算服务,是亟待解决的问题。文献[11]考虑在无人机上搭载边缘服务器,为地面用户提供边缘计算服务,考虑到用户的服务需求,通过联合优化UAV轨迹、用户发射功率和计算资源分配,实现UAV能量效率的最大化。受文献[11]的启发,如果引入一个搭载边缘服务器的UAV,当用户请求的计算任务超出地面BS边缘服务器的计算能力时,将额外的计算任务转移给UAV边缘服务器,就可以保证为用户持续提供边缘计算服务。
本文针对用户请求的计算任务超出地面BS边缘服务器计算能力的问题,提出一种UAV协助边缘计算的最小化系统能量消耗的资源分配策略。通过部署一个携带MEC服务器的UAV,在用户的任务请求超出地面BS的计算能力时,为用户提供额外的计算资源,保证用户能在一定的时延要求下完成计算任务。用户将任务卸载至BS和UAV边缘服务器的同时,可从环境射频源中收集能量。综合考虑用户卸载计算任务和边缘服务器处理计算任务,将系统资源分配问题建模成一个最优化问题,以最小化系统能量消耗为目标,同时满足用户能量因果性、BS和UAV边缘服务器的计算资源以及用户发射功率的约束条件。该最优化问题是非线性规划问题,采用联合遗传算法和非线性规划(Genetic Algorithm and Nonlinear Programming,GANLP)方法获得最优解。最后,通过仿真对提出的资源分配策略进行性能评估。
1 系统模型
1.1 网络结构
具有RF能量收集功能的MEC系统网络结构如图1所示。该MEC系统中,包括I个用户和一个地面BS1,BS1上部署了 MEC服务器。由于地面BS1的MEC服务器计算能力有限,为确保用户能在一定的时延要求下完成计算任务,在BS1附近部署一个携带MEC服务器的UAV协助计算。UAV的高度固定为H。用户 i(i=1,2,…,I) 可从环境 RF源收集能量。用户 i的坐标为 (xi,yi,0),BS1的坐标为 (xb,yb,Hb),UAV 的坐标为 (xq,yq,H)。第l(l=1,2,…,L) 个 RF 源坐标为 (xl,yl,Hl)。因此,用户i和BS1之间的距离为
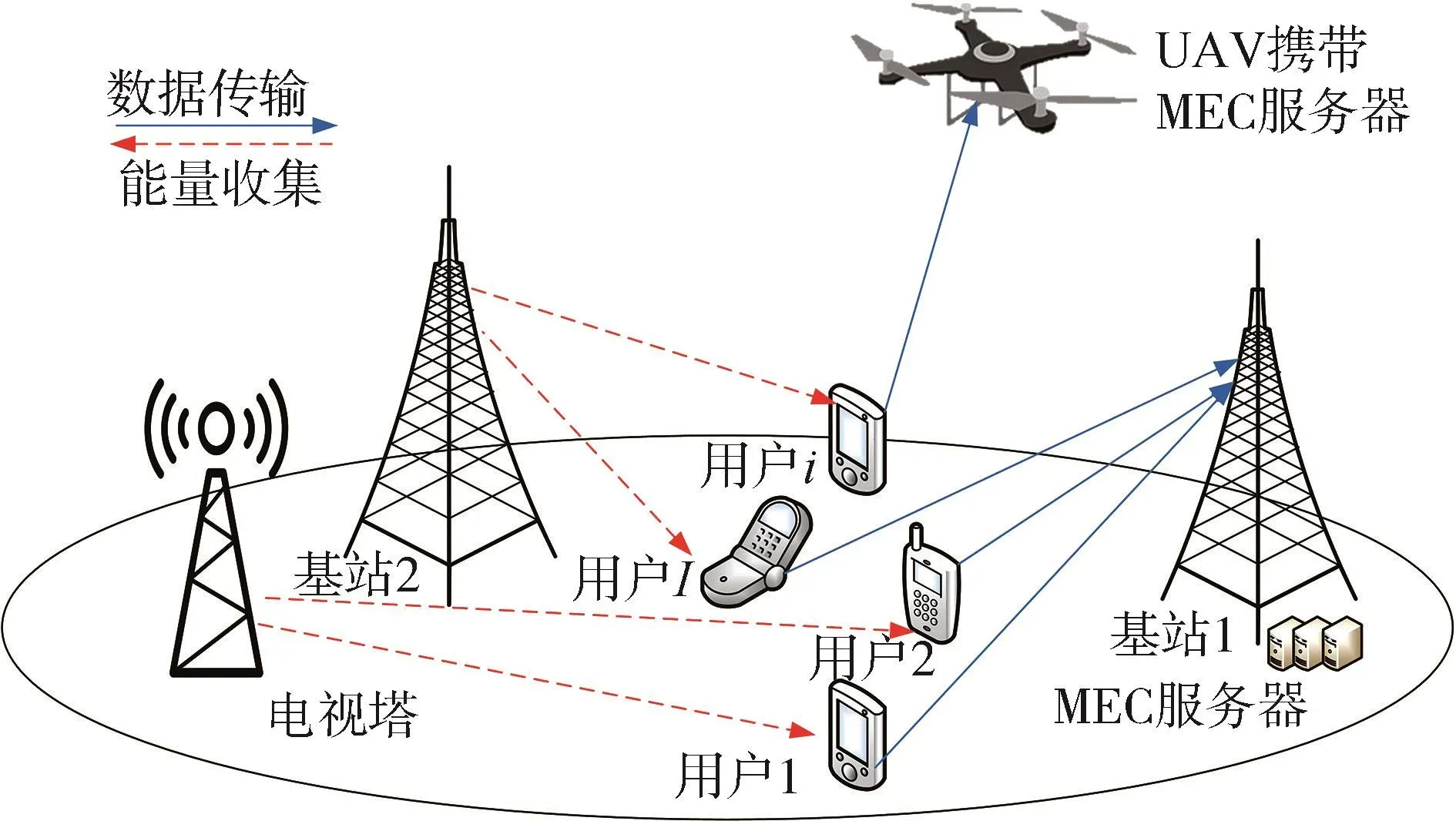
图1 UAV协助边缘计算的网络结构图

用户i和RF源l之间的距离为

用户i和UAV之间的距离为
用户计算任务卸载时序图如图2所示。用户将任务卸载至MEC服务器和MEC服务器计算用户任务都需消耗一定的时间,因此每个用户的计算任务会持续一段时间。假设BS1的MEC服务器能同时处理的最大用户数为n,每个任务只能在一个MEC服务器计算。当BS1的MEC服务器同时计算n个用户的卸载任务时,下一个用户将其计算任务卸载至协助计算的UAV处理。假设不同用户的任务产生间隔服从参数为λ的泊松分布,用户i的计算任务采用 Ui=(Di,Ci,T) 表示,其中,Di为用户 i计算任务的数据大小,Ci为用户i计算任务需要的计算资源,T为用户i计算任务的时延约束。
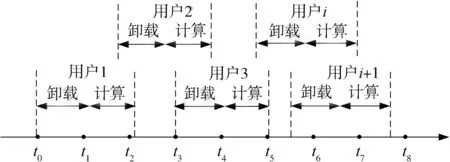
图2 不同用户的任务卸载和计算过程
1.2 用户能量收集模型
本节分析用户的能量收集模型。每个用户都配备能量收集电路,用户卸载计算任务的同时可从RF源收集能量。用户i附近的环境RF源包括电视塔和BS2。当用户i能量收集的时间为τ时,用户i收集到的能量为[12]


2 问题建模与求解
2.1 问题建模
针对上述系统模型,提出一种最小化系统能量消耗的资源分配策略。假设每个用户只有一个计算任务,但用户中央处理器主频较小,对于平均计算密度高的任务,本地计算时间长,易超出计算任务时延约束,因此本文将不考虑用户的本地计算。用户将计算任务卸载给计算能力更强的MEC服务器。通常,计算结果的数据量比开始上传时小很多,所以任务的计算结果返回时间远小于卸载时间和计算时间。因此,本文仅考虑用户任务卸载和MEC服务器处理用户任务阶段。
定义卸载调度ai={0,1}表示用户i的卸载决策,ai=1表示用户i将计算任务卸载给BS1的MEC服务器,ai=0表示用户i将计算任务卸载给UAV。此外,假设信道总带宽为B,分为I个子信道,定义σi为第i个子信道占用总信道的比例系数。MEC服务器与用户之间的信道以视距为主,无小尺度衰落[13]。
当ai=1,用户i将计算任务卸载给BS1时,用户i与BS1链路的信道增益gib为
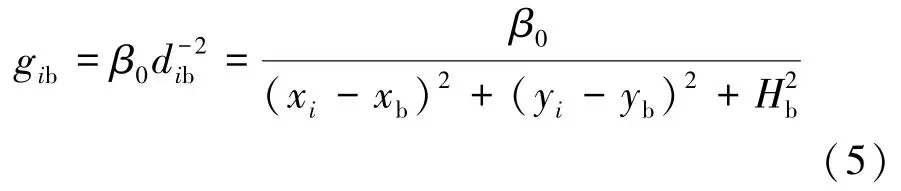
其中,β0是参考距离为1 m时的信道功率增益。用户i卸载计算任务至BS1的传输速率为

其中,pib为用户i将计算任务卸载给BS1的发射功率,N0为高斯白噪声功率。数据量大小为Di的任务卸载至BS1的传输时延为

同时,用户i将计算任务卸载至BS1的能量消耗为

假设fib为BS1分配给计算任务Ui的计算资源,即BS1的MEC服务器处理用户i任务的计算能力,则BS1处理用户i任务的计算时延为

同时,BS1计算消耗的能量为[14-15]

其中,Υ是一个和用户CPU类型相关的电容系数,Υ≥0。
当ai=0,用户i将计算任务卸载给UAV时,用户i与UAV链路的信道增益giu为
用户i卸载计算任务至UAV的传输速率为

其中,piu为用户i将任务卸载给UAV的发射功率。数据量大小为Di的任务卸载至UAV的传输时延为

同时,用户i将任务卸载至UAV的能量消耗为

定义fiu为UAV分配给计算任务Ui的计算资源,则UAV处理用户i任务的计算时延为

同时,UAV计算任务消耗能量为

本文资源分配策略的目标是最小化系统能量消耗,同时满足一些约束条件。该优化问题可以建模为

2.2 遗传算法和非线性规划优化
式(17)目标函数是自变量的非线性函数,约束条件也是关于自变量的非线性,因此式(17)为非线性规划问题,可通过结合传统GA和非线性规划求得全局最优解。GA是一种模拟生物界遗传和进化的人工智能优化算法[16],对当前种群进行一系列遗传操作,包括选择、交叉和变异,可使得当前种群演化成更适合环境的下一代种群,最终种群将进化到包含近似最优解的状态。GA虽然具有良好的全局搜索能力,但局部搜索能力相对较弱,容易收敛至局部最优解,一般得到的是优化问题的次优解。非线性规划的局部搜索能力强,收敛速度相对较快,但是全局搜索能力不理想。因此,可通过GANLP对建立的优化问题进行求解。求解问题(17)的算法流程如图3所示。
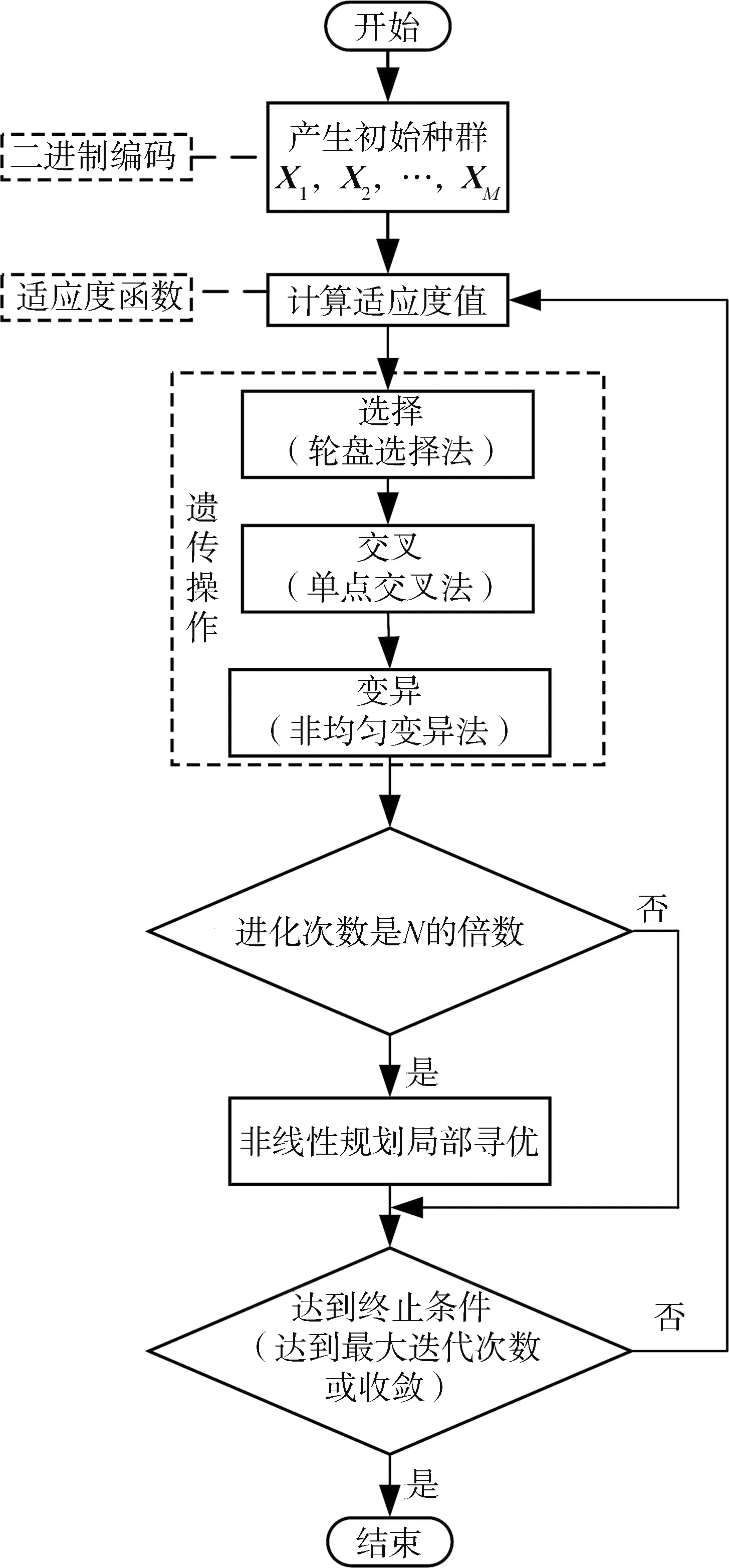
图3 GANLP方法流程图
首先,采用随机方式初始化种群,本文将采用二进制编码将变量参数编码为染色体。假设种群规模大小为M,将I个用户的发射功率、分配到的计算资源和子载波分配比例系数定义为个体的染色体,则个体m(m=1,2,…,M)的染色体向量可以表示为

然后,根据生成的适应度函数计算适应值。为保证遗传操作生成的染色体是有效的,通过惩罚函数法将式(17)中有不等式约束的非线性问题转化成无约束问题[17],因此适应度函数由目标函数和惩罚函数构成,表达式为

其中,fobj(fib,fiu,pib,piu,σi) 为目标函数;ξ是惩罚因子;fpen(fib,fiu,pib,piu,σi) 为惩罚函数,其包含了以下9个式子
其中,max(·,·)得到两个数值之间较大数的值。
接着,基于适应度值选取重组个体,采用轮盘选择法进行选择。个体被选取的概率与适应度值有关,适应度值越高的被选取概率越大。再采用单点交叉法对重组个体进行交叉操作,使得两个配对的染色体在其交叉点处相互交换其部分染色体。然后采用非均匀变异法对交叉后得到的新个体进行变异操作,改变新个体的某个或某些位值。再判断当前进化次数是否为N的倍数,如果是则采用非线性规划进行局部寻优;否则判断是否满足终止条件,若满足则可得到全局最优解。
为得到全局最优解,本文将GA和非线性规划结合。在采用GA进行全局搜索的同时,判断GA当前的迭代次数是否为N的倍数,如果满足条件,则将此时的种群作为初始值,采用非线性规划的外罚函数法进行局部搜索寻优,以得到全局最优解。具体实现流程如下。
步骤1:将有约束极值转化为无约束极值的辅助函数,数学模型如下:

其中,fobj(fib,fiu,pib,piu,σi) 为目标函数,Mk是惩罚因子。fpen(fib,fiu,pib,piu,σi) 是惩罚函数,惩罚函数对应了9个约束条件,表达式与式(20)中的约束条件相同。
步骤2:当迭代次数为N的倍数时,将此时的种群个体作为迭代的初始值 X(0),X 包含 fib、fiu、pib、piu和σi5个自变量,放大系数q>1,允许误差ε>0,置k=1。
(1)计算最速下降方向,即搜索方向,沿着负梯度方向进行搜索

(2) 从 X(k-1)出发,沿 d(k-1)的方向对种群初始值进行搜索,应先求出步长sk-1,步长sk-1满足

(3) 由 X(k)=X(k-1)+sk-1d(k-1)可得到极值点X(k)。
步骤 4:检验迭代准则,若 Mkfpen(X(k))<ε则停止迭代,得到的X(k)为最优解,把寻找到的局部最优值作为新个体染色体继续进化。否则,Mk+1=qMk,k=k+1,继续迭代。
为了更加清晰地说明基于GANLP方法的最小化系统能量消耗资源分配策略,其具体步骤如算法1所示。
算法1 基于GANLP方法的最小化系统能量消耗资源分配策略
①初始化种群:随机生成M个个体的初始种群,允许误差ε。
②评价种群:基于式(19)计算当前种群的适应度值。
③进行遗传操作:首先,采用轮盘选择法进行选择操作;然后,采用单点交叉法对重组个体进行交叉操作;最后,采用非均匀变异法对交叉后得到的新个体进行变异操作。
④判断迭代次数:判断当前迭代次数是否为N的倍数,如果是则进入步骤⑤进行非线性规划寻优,否则返回步骤②。
⑤重复计算:将当前迭代次数的种群个体作为迭代的初始值X(0),利用最速下降法重复计算。
⑥ 基于式(22)计算最速下降方向dk-1。
⑦ 基于式(23)计算步长sk-1。
⑧ 基于 X(k)=X(k-1)+sk-1d(k-1)得到极值点 X(k)。
⑨ 检验迭代准则:若 Mkfpen(X(k))<ε则进入步骤⑩;若Mk+1=qMk,k=k+1则返回步骤⑤。
⑩检验终止条件:若当前进化代数达到最大进化代数,则算法停止,输出最佳适应度值;否则,返回步骤②。
3 仿真结果与分析

在仿真中,将提出的方法与以下4种方法进行性能对比。第一种方法为基于GANLP的功率分配策略(Power Allocation Strategy Based on Genetic Algorithm and Nonlinear Programming,P⁃GANLP),在此方法中,仅有用户的发射功率采用GANLP方法进行优化,其他自变量为固定值(即 fiu=108cycles/s,σi=0.3,fib=109cycles/s)。第二种方法为基于GANLP的计算资源分配策略(Computing Resource Allocation Strategy Based on Genetic Algorithm and Nonlinear Programming,R⁃GANLP),在此方法中,仅有用户的计算资源采用GANLP方法进行优化,其他自变量为固定值(即 σi=0.3,pib=0.1 W,piu=0.05 W)。第三种方法为基于GANLP的子载波分配策略(Sub⁃carrier Allocation Strategy Based on Genetic Algorithm and Nonlinear Programming,C⁃GANLP),在此方法中,仅有用户的子载波分配比例系数采用GANLP进行优化,其他自变量为固定值(即 pib=0.1 W,piu=0.05 W,fib=109cycles/s,fiu=108cycles/s)。第四种方法为所有自变量(即 fib,fiu,pib,piu,σi) 采用 GA进行优化,简称为GA。
图4给出了GANLP方法中种群数量和迭代次数对系统能量消耗的影响。从图4中可以看出,在相同的迭代次数下,随着种群数量从20逐渐递增到80时,系统能量消耗逐渐减小。这是因为种群数量越多,全局搜索性能更佳,结果更接近最优值。同理,在相同的种群数量下,随着迭代次数从200逐渐递增到1 000时,系统能量消耗也逐渐降低,最终趋于稳定状态,但系统能量消耗的大小有一定程度的波动。例如,当种群规模为20时,迭代次数为200的系统能量消耗比迭代次数为400的更小。这是因为遗传操作中的变异、交叉过程会使得最佳适应度值具有一定的随机性,但种群最终都会朝着更适合生存的方向进化。当种群数量为60,迭代次数为1 000左右时,系统能量消耗达到最小。因此,在接下来的仿真中,将种群数量和迭代次数分别设置为60和1 000。
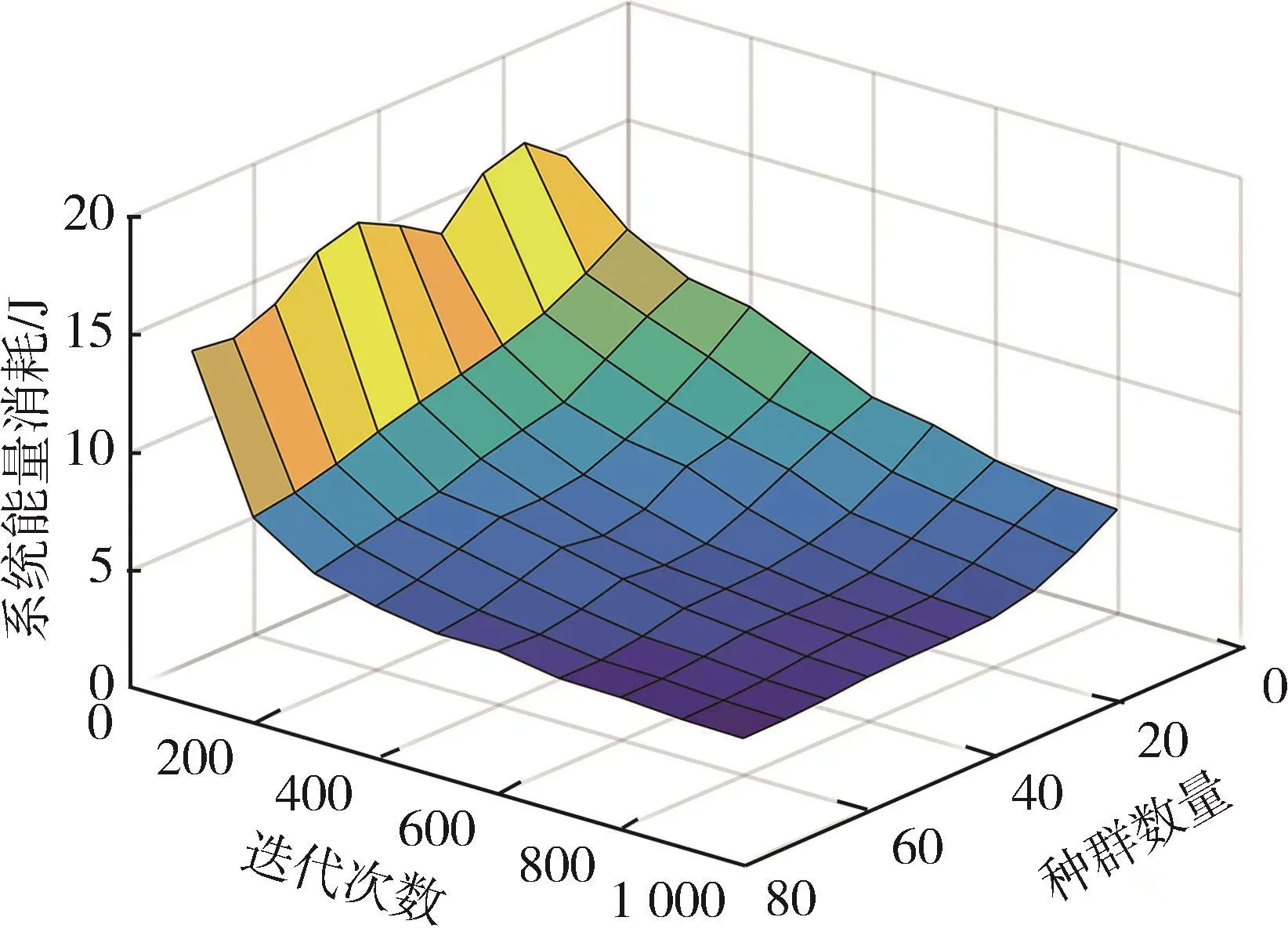
图4 GANLP中种群数量和迭代次数对系统能量消耗的影响
图5对比了不同用户数量在不同能量收集效率下的能量收集情况。从图5中可以看出,相同的用户数量下,随着能量收集效率从0.5增加到0.7,用户收集的总能量也随之增加。这是因为能量收集效率越高,将RF信号转换为直流电压获得的电能越多。此外,在相同的能量收集效率下,随着用户数量从20增加到30,所有用户收集的总能量也逐渐增多。当η为0.7,用户数量为30时,用户收集的总能量仅为14 J。这是因为RF源和用户之间的距离较远,电磁波在传播过程中存在损耗,导致用户的接收功率较小,因此用户收集的总能量较小。
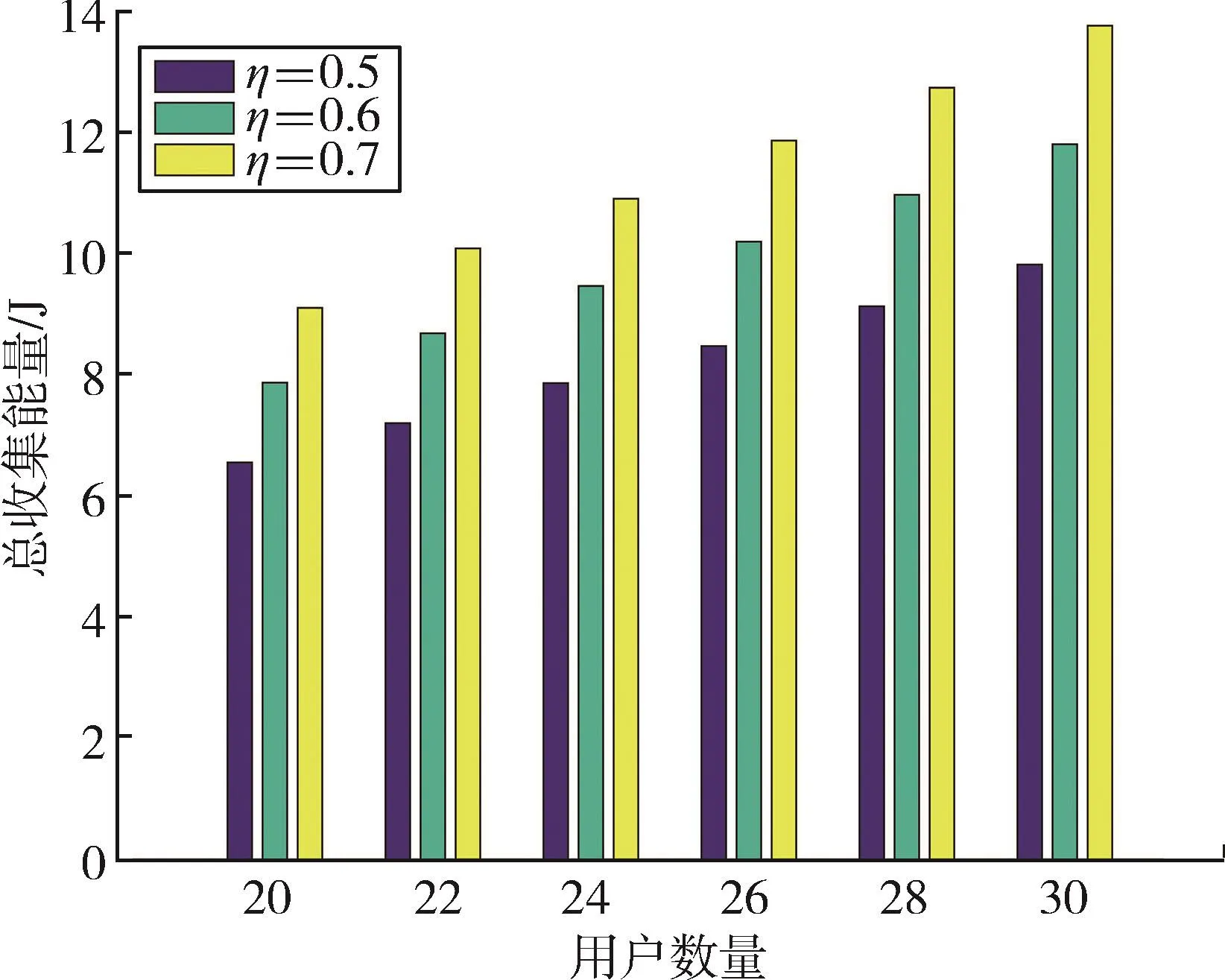
图5 不同用户数量时,不同能量收集效率下的能量收集情况
图6对比了传统GA和本文提出的方法GANLP的收敛性。从图6中可以看出,在相同的迭代次数下,GANLP系统能量消耗更小。这是因为传统GA容易出现早熟现象,陷入局部最优解,而非线性规划具有很强的局部搜索能力,搜索得到的结果更接近最优值。此外,还可以看出,GANLP经过600次迭代后,逐渐收敛至最优解,而传统的GA经过900次迭代后,才得到了局部最优解。因此,GANLP的收敛速度和寻优结果都优于GA。
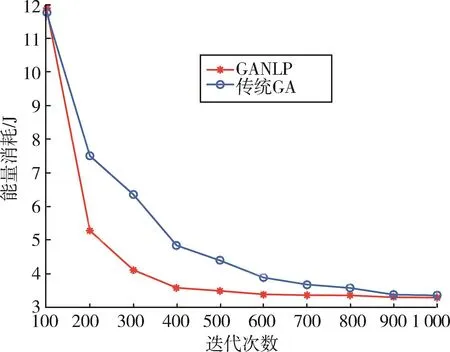
图6 两种算法收敛性对比
图7对比不同方法下用户数量和系统能量消耗的关系。从图7中可以看出,当用户数量从36逐渐增加到52时,5种方法得到的系统能量消耗值都有所增加。一方面是因为各个用户卸载计算任务至MEC服务器时消耗一些能量,用户数量越多,系统消耗的能量就会随之增多;另一方面是因为MEC服务器处理用户计算任务也会消耗一些能量,用户数量越多,计算任务越多,系统能量消耗也会随之增多。此外,GANLP系统能量消耗始终低于 P⁃GANLP、R⁃GANLP、C⁃GANLP 和 GA。这是因为,相对于固定发射功率、计算资源或子载波分配比例系数,GANLP同时对发射功率、计算资源和子载波分配比例系数进行搜索,具有更好的优化能力。同时,相对于传统GA,GANLP具有更强的局部搜索能力,搜索所得到的结果将会更接近最优解。
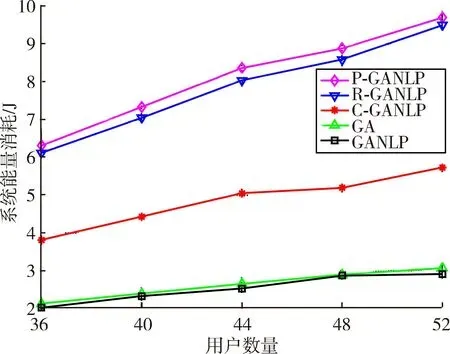
图7 用户数量和系统能量消耗的关系
4 结束语
本文针对现有研究没有考虑地面BS边缘服务器计算资源有限的问题,研究了UAV协助边缘计算的资源分配策略。通过部署携带MEC服务器的UAV,持续为用户提供边缘计算服务。超出地面BS边缘计算服务器处理能力阈值的用户,可卸载计算任务至UAV进行计算,以保证所有用户能在时延要求下完成任务。联合考虑用户和MEC服务器的能量消耗,将资源分配问题建模为非线性规划问题,在满足能量因果性、计算资源和发射功率的约束条件下,最小化系统能量消耗。通过引入GA结合非线性规划的方法获得最优解。仿真结果显示,GANLP全局搜索能力优于 GA算法。此外,相对于 P⁃GANLP、R⁃GANLP 和 C⁃GANLP,GANLP 具有更低的能量消耗。由于假设每个用户仅有一个计算任务且用户本身未参与计算,未来将针对用户具有多种计算任务,同时考虑用户本地和MEC服务器联合计算,对资源分配问题进行进一步研究。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
科学与财富(2020年6期)2020-05-19
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
电子技术与软件工程(2018年16期)2018-02-26
科技与创新(2017年11期)2017-07-01
计算机应用(2016年10期)2017-05-12
软件(2016年5期)2016-08-30
科技视界(2016年17期)2016-07-15
软件导刊(2015年6期)2015-06-24