机器人辅助与徒手置入椎弓根螺钉准确性和安全的Meta分析
2022-03-10 05:32高松森周鲁平曹云李伟陶晖杨庆国
颈腰痛杂志 2022年1期
高松森,周鲁平,曹云,李伟,陶晖,杨庆国
(安徽医科大学第一附属医院,安徽合肥 230031)
近年来,脊柱骨折、退变性腰椎疾病的发病率逐渐升高,椎弓根螺钉置入术成为重要的治疗手段[1]。脊柱解剖结构复杂,邻近重要神经、血管,徒手置钉依赖于椎体解剖标志及临床经验,且置钉准确率不高,易导致重要血管、神经等损伤[2,3]。为此,利用计算机辅助导航、提供弓根螺钉精确置入方向的骨科手术机器人应运而生[4]。机器人辅助置钉的准确性和安全性,成为近年来的研究热点。Ringel等[5]研究认为,徒手置钉的准确性优于机器人辅助置钉;Feng等[6]则认为机器人辅助置钉准确性高于徒手置钉,且单钉置入时间较少,手术出血量较少,安全性较高。多位学者针对机器人辅助与徒手置钉的准确性和安全性进行了Meta分析,Liu等[7]与Peng等[8]研究认为,机器人辅助置钉与徒手置钉的准确性无明显差异。徐朝健等[9]与Li等[10]认为,机器人辅助置钉的准确性优于徒手置钉,且术中辐射强度较小、出血量较少。不同学者的研究报道结论不一,可能与纳入的研究类型、文献质量、研究年限有关。目前,多款国产机器人上市[11,12],为国内骨科机器人手术开辟了广阔天地。为此,笔者检索了国内外相关文献进行Meta分析,为临床决策提供参考依据。
1 资料与方法
1.1 文献检索
计算机检索中国期刊全文数据库、中国生物医学文献数据库、万方数据库、PubMed、The Cochrane Library数据库中关于机器人辅助置入椎弓根螺钉(robot-assisted placement of pedicle screws,RA)与徒手置入椎弓根螺钉(free-hand placement of pedicle screws,FH)治疗胸腰椎疾病的文献资料,徒手置钉包括经皮透视徒手置钉和开放切口徒手置钉。检索时间自2010年1月~2020年12月;检索语言限定为中文和英文,中文检索词为:机器人、机器人辅助、椎弓根螺钉、椎弓根钉,英文检索词为:robotic、robotics、robot-assisted、pedicle screws。同时,阅读部分文献的引用文献,相关Meta分析或系统评价的引用文献。
1.2 文献纳入和排除标准
1.3 数据提取
由2名研究人员分别进行文献检索、数据提取,有分歧之处共同协商;若仍有异议,再请另外1名研究人员共同协商或讨论决定,最终结果需参与作者均无异议,方可进行统计分析。纳入研究的主要特征见表1。并发症包括:切口疼痛、感染、椎间融合器下沉、神经根损伤、肌力下降、下肢疼痛或麻木加重、气胸,每个亚组按并发症总数进行统计分析。
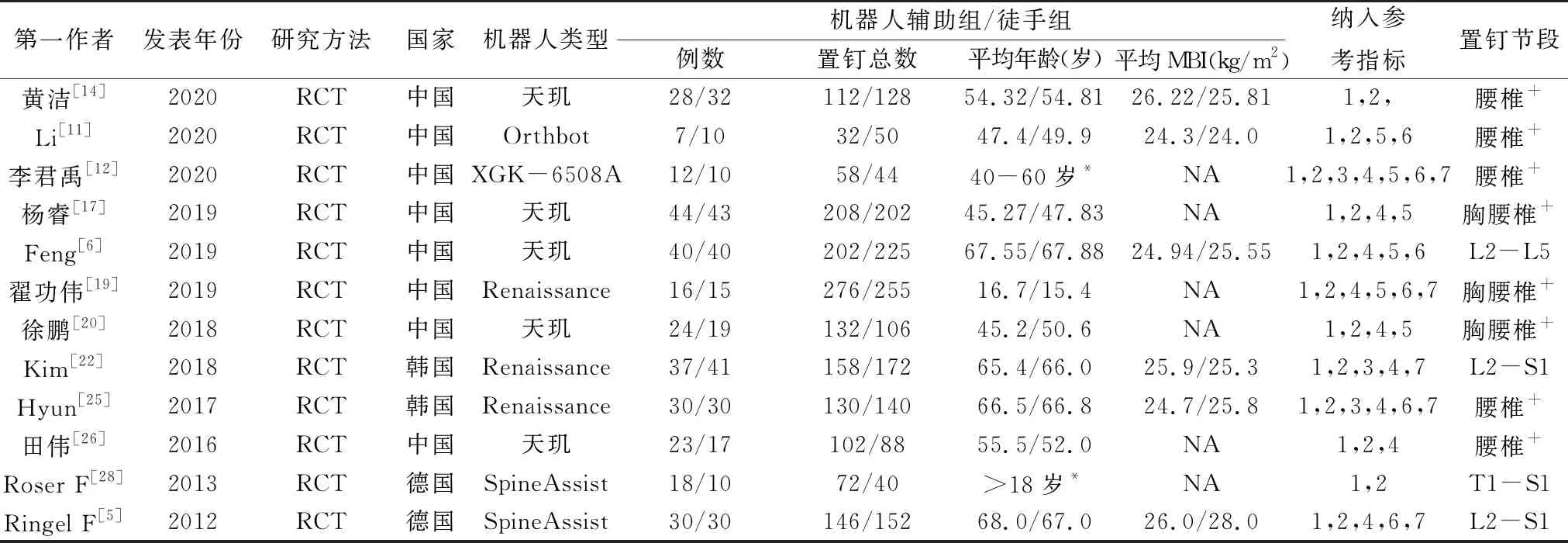
表1 纳入文献的主要特征
1.4 文献质量评价
应用Cochrane风险偏倚评估工具对纳入的RCT文献进行质量评价,通过绘制漏斗图评价其发表偏倚。该过程由2名作者独立进行,有分歧之处邀请第3名作者共同讨论决定。
1.5 统计学分析
应用Review Manager 5.4.1软件进行Meta分析,连续性变量采用加权均数差(weighted mean difference,WMD)及其95%置信区间(confidence interval,CI)作为统计量。二分类变量采用相对危险度(Relatine Risk,RR)和95%CI作为统计量。各研究结果之间的异质性采用x2检验进行分析,检验标准设为ɑ=0.1。若I2≤50、P>0.1则认为研究间异质性不显著,此时采用固定效应模型进行Meta分析。若I2>50、P≤0.1则认为研究间存在显著异质性,此时采用随机效应模型进行Meta分析,P<0.05表示差异有统计学意义。
2 结果
2.1 文献检索结果
共检索出406篇文献,按照纳入和排除标准,初步筛选出19篇[5,6,11,12,14-28]RCT研究文献。剔除动物实验1篇[16];3篇[21,22,24]文献为同一研究,剔除文献2篇[21,24];2篇[6,15]文献第一作者相同、研究对象为同一家医院、研究对象时间段有重复,虽然手术方式不同,仍予剔除1篇[15];2篇[6,18]文献研究对象为同一家医院、研究对象时间段有重复,剔除1篇[18]。1篇[23]因手术时间、术中出血量采用“中位数”表述,而其他文献均采用“平均数±标准差”表述,因此无法统一进行Meta分析,予以剔除。2篇[22,27]文献为同一作者、同一家医院,且研究对象的时间段重复,剔除1篇[27]。最终纳入12篇RCT文献进行本次Meta分析,中文文献6篇,英文文献6篇。以上所述“重复”文献,研究侧重点不同,为了减少使用偏倚或选择偏倚,故予以剔除。剔除文献的选择,根据文献中参考指标的多少及其数据完整性而定。杨睿等[17]研究中由于机器人故障剔除1例,故机器人辅助置钉组纳入统计患者44例。 12篇文献,共计纳入患者606例,其中机器人辅助置钉组309例,徒手置钉组297例。共计置入椎弓根螺钉3230枚,其中机器人辅助置钉组1628枚,徒手置钉组1602枚。
2.2 纳入文献质量评分
纳入的12篇随机对照研究中,共4篇[12,14,17,26]描述了随机分组方法,均未详细描述盲法和分配隐藏,均完整报道了研究结果,无选择性报道结果;共6篇[5,11,15,20,22,26]文献强调了由未参加手术的医生进行螺钉精度的分级,纳入文献偏倚评价结果图2所示。各研究报道中,两亚组患者的一般资料均有齐同可比性。
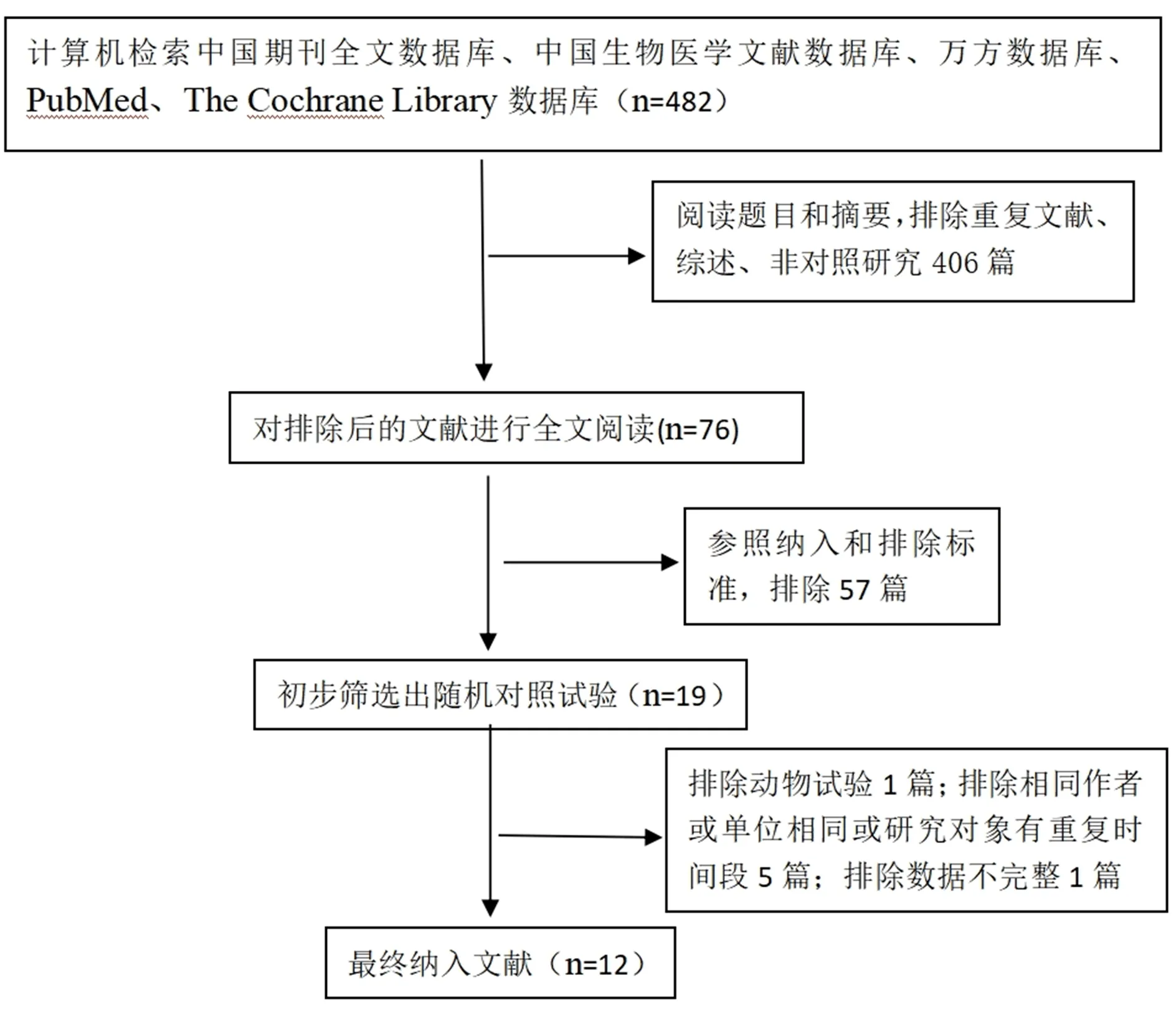
图1 文献筛选流程
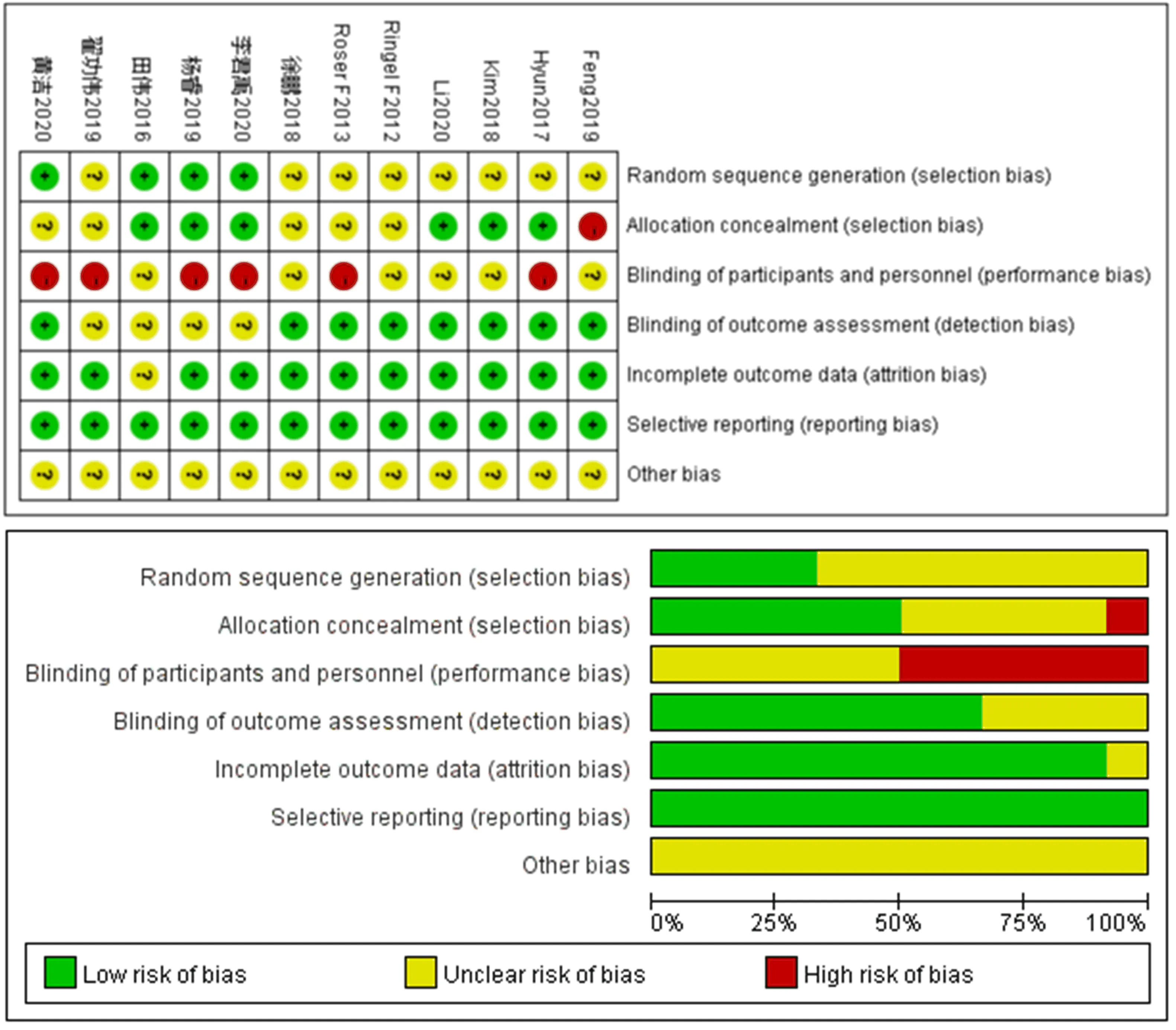
图2 偏倚风险评估图
2.3 椎弓根螺钉准确性评价
2.3.1 置钉精度
纳入的12篇文献均报道了机器人辅助组与徒手组置钉的结果,共计螺钉3230枚,机器人辅助组1628枚,徒手组1602枚。对置钉精度(A级)分析示:两组之间异质性较高(P<0.1,I2=80%),采用随机效应模型进行Meta分析。两组置钉精度(A级)差异有统计学意义[RR=1.10,95%CI(1.04,1.16),P<0.05],提示机器人辅助置钉精度(A级)高于徒手置钉(图3)。由于纳入文献中,国内研究占比较高,特将纳入文献分为国内研究、国外研究两个亚组:国内研究[RR=1.15,95%CI(1.08,1.23),P<0.05],提示机器人辅助置钉精度(A级)高于徒手置钉;国外研究[RR=1.02,95%CI(0.98,1.06),P=0.40],差异无统计学意义,提示存在一定程度的地区发表偏倚(图3)。
对置钉精度(A+B级)分析示:机器人辅助组与徒手组之间异质性较高(P<0.1,I2=88%),采用随机效应模型进行Meta分析。机器人辅助组与徒手组置钉精度(A+B级)差异无统计学意义[RR=1.03,95%CI(0.99,1.07),P=0.13],提示两组置钉精度相当。同法,分为国内研究、国外研究两个亚组进行Meta分析,结果相同,提示无明显地区发表偏倚(图4)。
校级准入机制重在与学生的学籍注册与毕业、新员工的入职资格挂钩,通过强制性准入制度提升师生员工的安全环保意识和自觉性。院级准入机制重在通过与学生实验课成绩、研究生实验室使用限制、员工绩效考核等挂钩,规范师生员工的实验室安全环保行为。实验室级准入制度重在提升师生员工的工作能力,严格规范实验行为,培养有序、自觉、科学的学习和研究习惯。
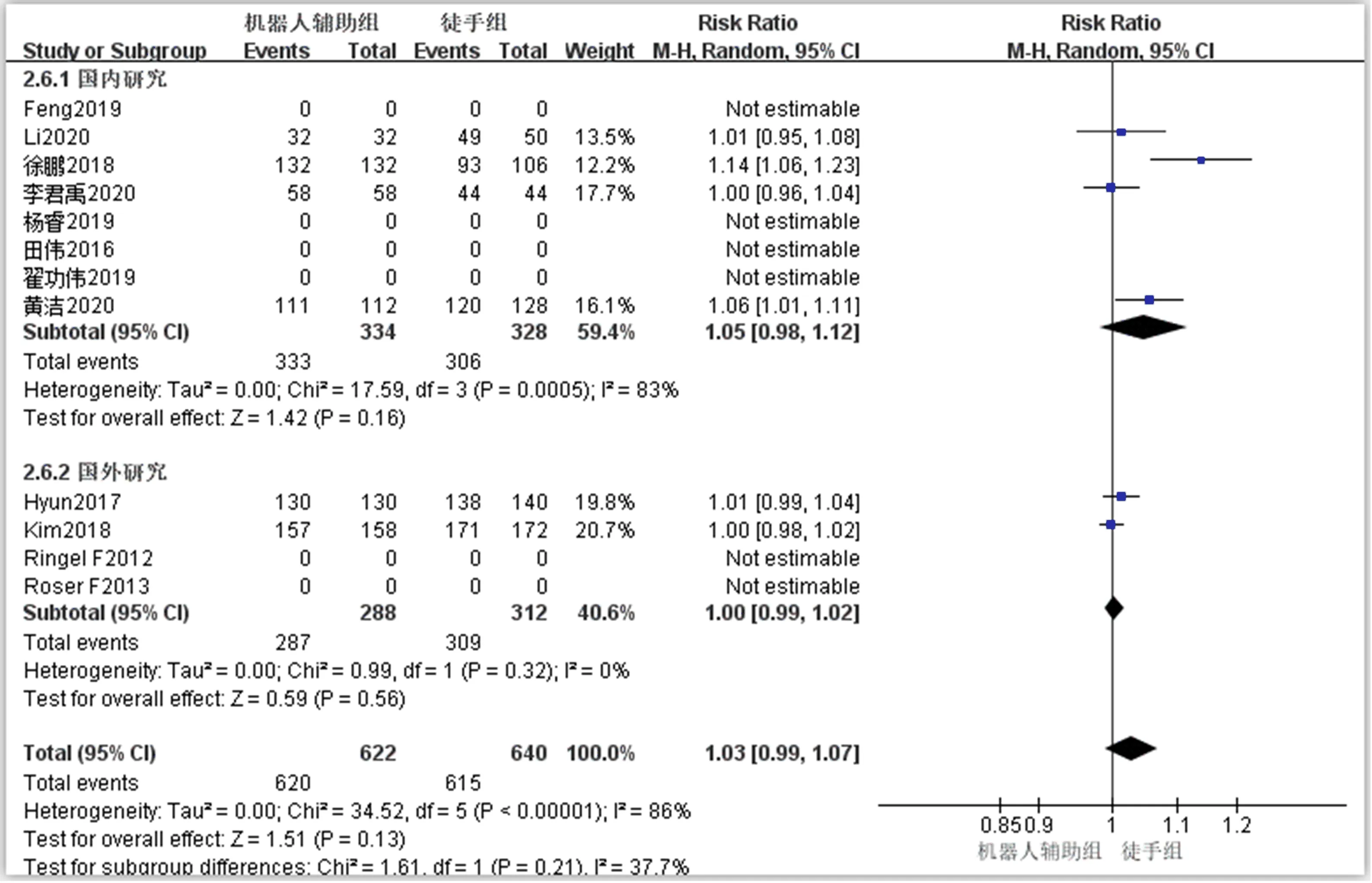
图4 机器人辅助与徒手组置钉精度(A+B级)的Meta分析森林图
2.3.2 对近端关节面的侵扰
共3篇[12,22,25]文献报道了机器人辅助组与徒手组置钉对近端关节面的侵扰结果,共计螺钉702枚,机器人辅助组346枚,徒手组356枚。分析示:两组之间异质性较低(P=0.15,I2=47%),采用固定效应模型进行Meta分析。两组对近端关节面侵扰差异有统计学意义[RR=0.24,95%CI(0.10,0.60),P<0.05],机器人辅助置钉对近端关节面侵扰低于徒手置钉(图5)。
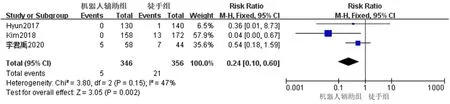
图5 机器人辅助与徒手组对近端关节面侵扰的Meta分析森林图
2.4 安全性评价
2.4.1 手术时间
共9篇[5,6,12,17,19,20,22,25,26]文献报道了机器人辅助组与徒手组手术时间,共计纳入501例,机器人辅助组256例,徒手组245例,手术时间均需使用“平均数±标准差”表示。分析示:两组之间异质性较高(P<0.1,I2=84%),采用随机效应模型进行Meta分析。两组手术时间差异无统计学意义[WMD=5.88,95%CI(-7.75,19.51),P=0.40](图6)。
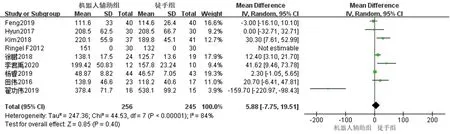
图6 机器人辅助与徒手组手术时间的Meta分析森林图
2.4.2 术中出血量
共6篇[6,11,12,17,19,20]文献报道了机器人辅助组与徒手组术中出血量,共计纳入280例,机器人辅助组143例,徒手组137例。分析示:两组之间异质性较高(P<0.1,I2=80%),采用随机效应模型进行Meta分析。两组术中出血量差异无统计学意义[WMD=-16.09,95%CI(-48.42,16.24),P=0.33](图7)。
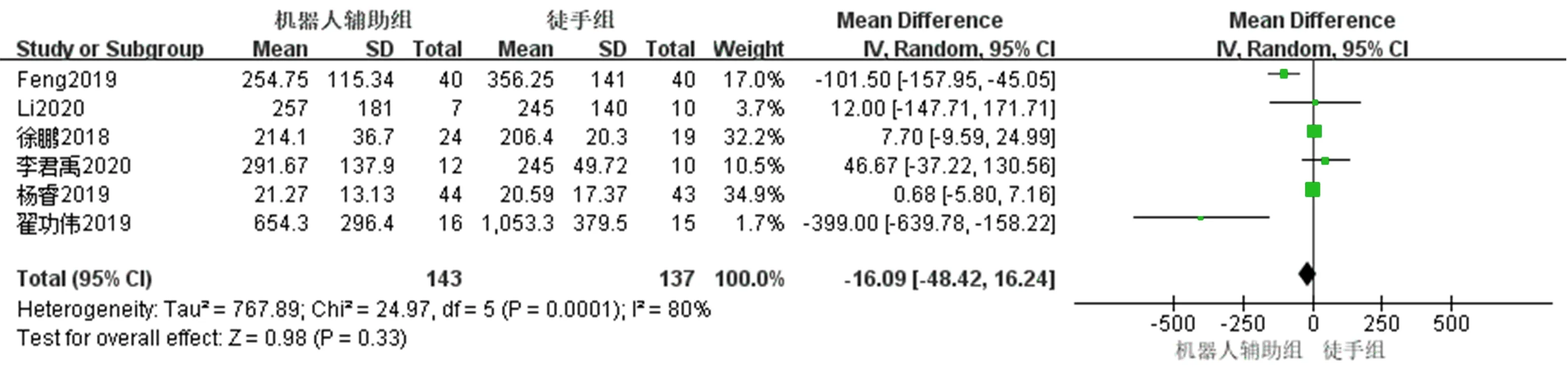
图7 机器人辅助与徒手组术中出血量的Meta分析森林图
2.4.3 住院时间
共6篇[5,6,11,12,19,25]文献报道了机器人辅助组与徒手组住院时间,根据总住院时间或术后住院时间,分为两个亚组Meta分析。对总住院时间分析示:两组之间异质性较高(P=0.02,I2=76%),采用随机效应模型进行Meta分析。两组总住院时间差异无统计学意义[WMD=-0.43,95%CI(-2.72,1.85),P=0.71]。对术后住院时间分析示:两组之间异质性较高(P<0.1,I2=98%),采用随机效应模型进行Meta分析。两组术后住院时间差异无统计学意义[WMD=-1.77,95%CI(-4.95,1.42),P=0.28]。若不区分总住院时间或术后住院时间,总体分析示:两组之间异质性较高(P<0.1,I2=94%),采用随机效应模型进行Meta分析。两组住院时间差异无统计学意义[WMD=-1.04,95%CI(-2.96,0.87),P=0.29](图8)。
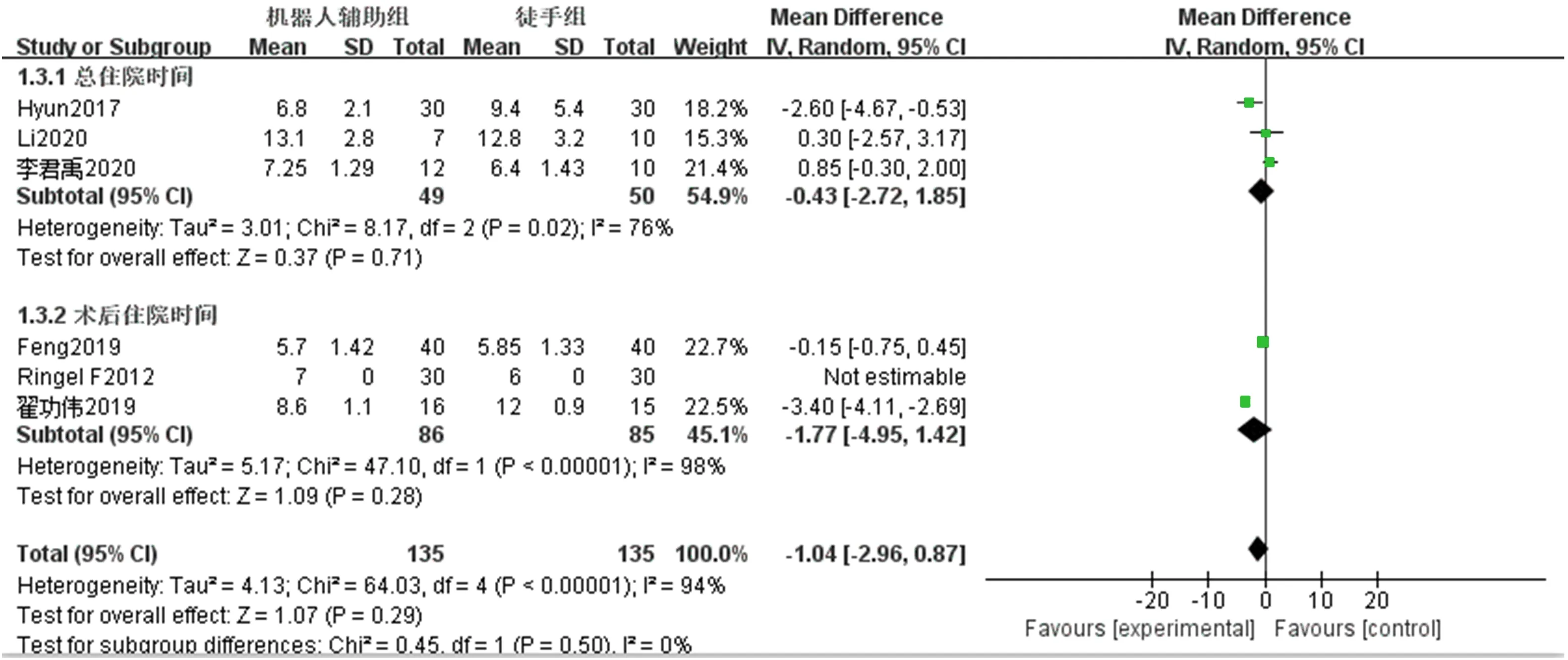
图8 机器人辅助与徒手组住院时间的Meta分析森林图
2.4.4 并发症
共5篇[5,12,19,22,25]文献报道了机器人辅助组与徒手组并发症例数,共计纳入121例,机器人辅助组125例,徒手组126例。分析示:两组之间无明显异质性(P=0.89,I2=0%),采用固定效应模型进行Meta分析。两组并发症例数差异无统计学意义[RR=0.50,95%CI(0.20,1.26),P=0.14](图9)。
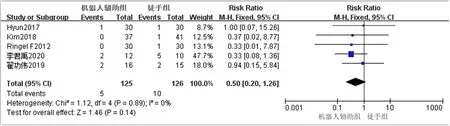
图9 机器人辅助与徒手组并发症的Meta分析森林图
2.4.5术中透视时间
共4篇[5,11,25,28]文献报道了机器人辅助组与徒手组术中透视时间,共计纳入165例,机器人辅助组85例,徒手组80例。分析示:两组之间异质性较高(P<0.01,I2=90%),采用随机效应模型进行Meta分析。两组术中透视时间差异有统计学意义[WMD=-5.62,95%CI(-13.06,1.81),P<0.05],提示机器人辅助组术中透视时间少于徒手组(图10)。
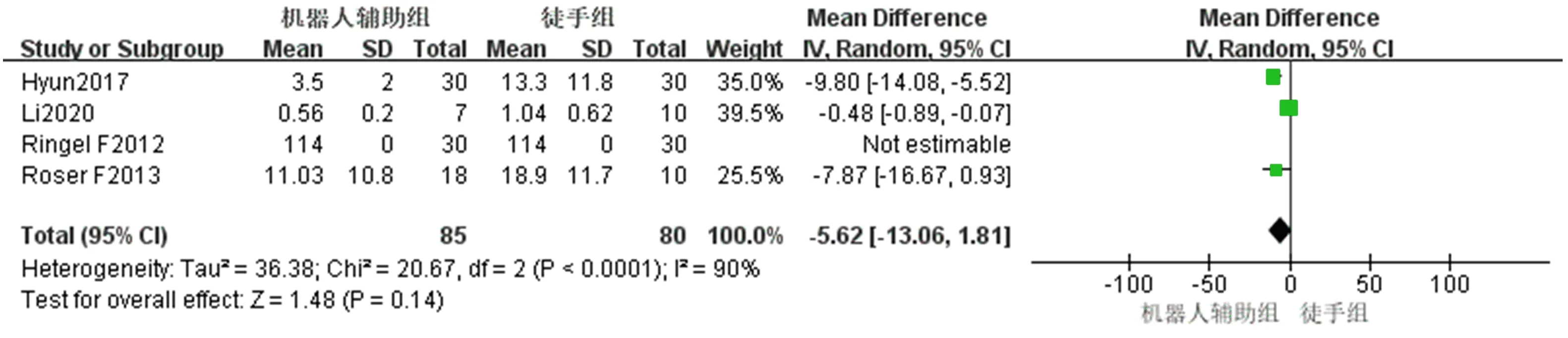
图10 机器人辅助与徒手组透视时间的Meta分析森林图
2.5 异质性和敏感性分析
置钉精度(A级、A+B级)异质性较高,采用敏感性分析,为探究异质性来源,笔者首先逐一剔除纳入文献,将剩余文献再次进行Meta分析,结果显示各组异质性仍较高,说明研究结果可靠。再采用亚组分析,为排除机器人类型的影响,对使用天玑机器人的5篇文献进行Meta分析,异质性仍较高,这可能与机器人学习曲线、纳入研究对象主诊断有关(骨折、退变性腰椎疾病等)。对使用SpineAssist机器人的两篇文献分析:异质性较高(I2=90%),对使用Renaissance机器人的两篇文献分析示:无明显异质性(I2=0%),可能与机器人优化更新有关。以类似的方法,针对异质性较高的指标:手术时间、术中出血量、住院时间进行分析,结果显示各组异质性仍较高,说明研究结果可靠。
2.6 偏倚分析
分别对置钉精度(A级、图11)、置钉精度(A+B级、图12)的研究结果绘制漏斗图,从漏斗图可以看出,两组的散点图分布大体对称,提示发表偏倚的可能性较低。其他指标如:对近端关节面的侵扰、手术时间、术中出血量、住院时间、并发症例数、术中透视时间,因纳入数据分析文献均少于10篇,未做漏斗图分析。纳入文献多为国内研究,如前所述,笔者对国内研究、国外研究进行亚组分析,结果提示置钉精度(A级)存在一定的地区偏倚。
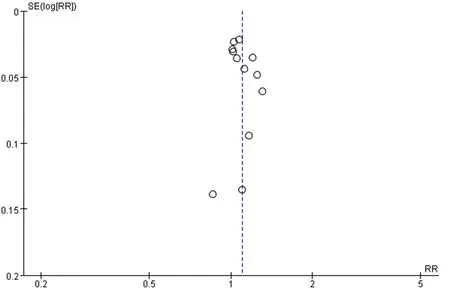
图11 两组置钉精度(A级)的漏斗图
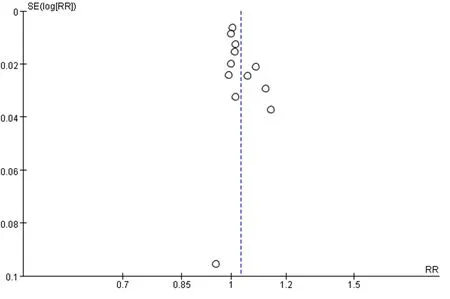
图12 两组置钉精度(A+B级)的漏斗图
为了解病种对术中置钉的影响,3篇[6,11,25]文献纳入研究对象均为退变性腰椎疾病,单独进行亚组分析,结果表明:机器人辅助组与徒手组在退变性腰椎置钉精度(A级)差异有统计学意义[RR=1.07,95%CI(1.03,1.10),P<0.05],提示机器人辅助置钉精度(A级)高于徒手置钉。机器人辅助组与徒手组在退变性腰椎置钉精度(A+B级)[RR=3.07,95%CI(0.50,18.71),P=0.22],差异无统计学意义。结果说明,病种对置钉精度的影响较小。以上亚组分析结果,与12篇文献统一分析结果一致,可能是由于纳入12篇文献中,腰椎置钉占比较大。
3 讨论
Boucher等[29]于1959年正式报道了椎弓根螺钉内固定术,由于其坚强的内固定、三柱支撑,广泛应用于脊柱退变性疾病、创伤、畸形、滑脱、感染等[30]。提高置钉准确性可有效减少邻近的血管、神经根、脊髓损伤,减少对邻近关节突关节的影响[8]。随着人工智能的发展,骨科手术机器人技术也在不断进步,在国内外得到广泛研究。
目前,临床使用的SpineAssist、Renaissance、天玑机器人,均为辅助定位机器人,需医生手工置入克氏针。新研发国产Orthbot和XGK-6508A机器人可自动进行克氏针的置入操作,笔者针对这两种机器人置钉精度进行Meta分析,结果表明机器人辅助与徒手置钉精度(A级)无显著性差异[RR=1.13,95%CI(0.96,1.13),P=0.14],置钉精度(A+B级)无显著性差异[RR=1.01,95%CI(0.97,1.04),P=0.0.72]。纳入的5篇[6,14,17,20,26]文献使用了天玑机器人,进行亚组Meta分析示:机器人辅助与徒手置钉精度(A级)差异有统计学意义[RR=1.14,95%CI(1.06,1.22),P<0.05],机器人辅助置钉精度(A级)优于徒手置钉;置钉精度(A+B级)差异无统计学意义[RR=1.05,95%CI(0.99,1.12),P=0.10],两组置钉精度(A+B级)相当。然而,机器人置钉并非无所不能,翟功伟等[19]研究Renaissance机器人辅助后路椎弓根螺钉内固定矫形治疗脊柱侧凸时,有3例重度脊柱侧凸患者8个椎弓根因解剖位置变异,改行传统后路椎弓根螺钉内固定术,提示在椎体形态严重异常的情况下,机器人辅助系统因角度有限,定位不准确,继续手术可能误伤神经根、脊髓、血管等,此为机器人使用的限制。笔者认为,可能是由于Renaissance机器人是固定在患者脊柱上的小型6个自由度并联机构,导致辅助置钉角度有限制。而国产机器人均使用六轴自由臂(天玑、Orthbot、XGK-6508A),放置在手术床旁辅助手术操作,对置钉角度的操作范围更大。同时,这也为7轴自由臂的研发给予了一定的启示。
关节突关节是脊柱生物力学结构的重要组成部分,关节突关节损伤会破坏脊柱运动节段的稳定性并加速邻近节段退变。因椎弓根螺钉对近端关节面的侵扰是临床中常见却极易被忽视的原因,故减少术中关节突关节的破坏对减少术后邻近节段退变具有重要意义[31]。本次Meta分析表明:机器人辅助置钉对近端关节面的侵扰例数低于徒手置钉。对近端关节面的侵扰纳入统计的3篇文献中,仅1篇文献具体报道侵扰分级(8个1级,5个2级),所以未进行亚组分析。
辐射暴露对人体有害,过量的辐射暴露会增加肿瘤发生率[32],辐射防护至关重要。共9篇文献报道了术中辐射强度,因使用计量单位多样,无法统一进行Meta分析,我们纳入4篇文献,针对术中透视时间进行Meta分析,结果提示机器人辅助组术中透视时间少于徒手组。共7篇文献认为机器人辅助置钉可显著减少辐射强度,其中,Hyun等[25]研究认为:机器人辅助置钉的平均单钉术中辐射强度仅为徒手置钉的37.5%。临床工作中,医务人员可穿铅衣防护,或在手术台上扫描三维成像时移步至铅制防护板后,以减少辐射暴露。目前,脊柱机器人辅助操作均需结合三维CT扫描数据(术前或术中扫描),计算、规划置钉路径,三维CT扫描辐射剂量在这9篇文献中均未纳入对比研究。而徒手置钉中,三维CT扫描并非必要步骤。因此笔者认为,仅使用术中辐射强度作对比,并不能代表患者真正承受的辐射强度。
患者术中的呼吸管理(胸廓的起伏)也会影响图像配准[33]。术中呼吸机潮气量的大小会影响到胸廓上下波动幅度,从而对机器人辅助置钉产生影响。患者术中多为俯卧位,呼吸运动对腰椎影响较小。为此,笔者对腰椎手术的8篇文献进行亚组分析,结果表明:机器人辅助组与徒手组在腰椎置钉精度(A级)差异有统计学意义[RR=1.05,95%CI(1.01,1.08),P<0.05],提示机器人辅助置钉精度(A级)高于徒手置钉。机器人辅助组与徒手组在腰椎置钉精度(A+B级)方面[RR=1.01,95%CI(0.99,1.03),P=0.50],差异无统计学意义。
本次Meta分析纳入的研究对象年龄分布较宽,主要诊断包括“腰椎退变性疾病、腰椎滑脱、胸腰椎骨折、脊柱侧凸畸形、骨质疏松”,来自3个国家、多个地区,手术节段涵盖T1-S1。与笔者检索到的Meta分析相比,本次Meta分析纳入RCT文献最多,且针对相同医院发表的文献仔细筛选,去除了研究时间段有重叠的文献,尽量减少了选择偏倚。本次Meta分析包含最新上市的两款国产机器人,研究结果的参考价值更高。
笔者的研究表明:与徒手置入椎弓根螺钉相比,机器人辅助置钉精度(A级)较优,对近端关节面的侵扰较少,术中透视时间更少。机器人辅助组与徒手组在置钉精度(A+B级)、手术时间、术中出血量、并发症例数、住院时间方面无明显差异。实际工作中,临床置钉方式的选择需综合考虑医疗费用、手术节段(胸椎受呼吸影响较大,腰椎影响较小)、患者意愿、手术医师技术等多方面因素,制定个体化治疗方案。
本研究的局限性之一是:由于报道“对近端关节面的侵扰例数、手术时间、术中出血量、住院时间、并发症例数、术中透视时间”的研究数量少于10篇,因此未对这些研究指标进行发表偏倚评估;其次,本研究中的徒手置钉,包括传统经皮透视辅助置钉和开放术式徒手置钉,未单独进行亚组分析,且纳入研究的病例数量不足,导致本次 Meta 分析存在一定不足之处。 因此,还需大样本、多中心、高质量、统一度量衡的随机对照研究,提供更有力的证据。
猜你喜欢
临床肝胆病杂志(2022年8期)2022-11-23
创伤外科杂志(2022年7期)2022-11-21
社会科学战线(2022年5期)2022-07-23
社会科学战线(2022年5期)2022-07-23
现代企业(2021年2期)2021-07-20
武术研究(2021年2期)2021-03-29
保健与生活(2020年1期)2020-05-07
武术研究(2020年2期)2020-04-21
海外星云(2017年20期)2017-11-01
科技资讯(2016年9期)2016-05-14