
自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法
2022-03-08 02:37李昕芮王会峰
上海交通大学学报 2022年2期
黄 鹤, 吴 琨, 李昕芮, 王 珺, 王会峰, 茹 锋, 2
(1. 长安大学 电子与控制工程学院, 西安 710064; 2.长安大学 西安市智慧高速公路信息融合与控制重点实验室, 西安 710064; 3. 西北大学 信息科学与技术学院,西安 710127)
随着智能监控软硬件的迅速发展[1],车辆跟踪技术的研究受到了国内外学者的广泛关注,涌现出许多经典算法.文献[2]首次将粒子滤波(PF)引入目标跟踪领域,国内外学者针对PF跟踪算法展开的研究主要集中在两个方向. ① 针对PF跟踪算法采用单一特征易受外界干扰的问题,文献[3]提出改进PF视觉目标跟踪算法,通过采用方向梯度直方图(HOG)特征、局部二值模式(LBP)特征共同描述目标信息,增强特征表达能力,但在运动模型改变、遮挡等条件下易出现跟踪漂移.文献[4]将颜色与加速稳健特征(SUFT)乘性融合,提高了跟踪精度和鲁棒性,但需要大量的粒子缓解由粒子贫化导致的不稳定,降低了算法的综合性能.② 针对粒子退化现象导致的算法效率低、跟踪性能差的问题,文献[5]利用分层重采样的思想,将样本粒子按层划分,以防少数粒子被多次重复复制,提升了粒子的多样性,但计算量较大,无法保证跟踪的实时性.文献[6]选择权值较大的粒子用于下一时刻的状态预测,缓解粒子耗尽现象.但其依旧采用重采样的基本框架,无法根本解决粒子退化问题,会导致样本多样性损失.
近年来,利用群体智能算法[7-8]优化PF性能成为新的研究方向,吸引越来越多学者的关注.文献[9]将遗传算法与粒子滤波算法相结合,改善了粒子多样性损失现象.文献[10]对萤火虫优化算法进行改进,并将其引入粒子滤波算法中,利用萤火虫算法的迭代寻优机制提高算法跟踪性能,然而上述两种算法在处理复杂度较大的问题时精度较低.此外,群体智能优化也出现了一些新的算法,文献[11]于2015年根据飞蛾的趋光性提出了一种新的飞蛾扑火优化(MFO)算法,在复杂情形下的寻优性能表现优越,并在无人机、电力等方面有了一些优化应用[12-14],但目前关于MFO算法在目标跟踪领域的应用研究基本没有.而MFO算法与PF算法两者在算法设定、最优解求取以及更新机制等方面有诸多相似之处,所以MFO算法非常适合嵌入和优化PF,并且利用MFO算法对粒子进行迭代寻优,不会舍弃权值较低的粒子,可以在根本上消除粒子退化带来的影响.但在优化过程中,现有MFO算法的寻优精度和收敛速度仍需改进提升.
针对基于单一颜色特征粒子滤波跟踪算法易受环境影响的问题,提出了多特征自适应融合粒子滤波车辆跟踪算法,增强特征表达能力,提升算法的跟踪精度和稳定性;然后,针对粒子滤波算法中普遍存在的粒子退化问题,提出了自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法,优化粒子在状态空间的分布,提升算法在复杂交通场景下的跟踪性能,在车辆目标发生遮挡、光照、姿态及尺度变化等干扰下仍然能够准确、稳定地跟踪目标车辆.本文研究在群智能算法优化复杂环境下的车辆跟踪性能中有着重要的理论意义.
1 跟踪算法
1.1 多特征自适应融合粒子滤波跟踪算法
实际交通场景复杂多变,存在干扰因素,因此,首先提出了一种多特征自适应融合粒子滤波(MAFPF)跟踪算法,利用目标纹理与颜色特征的互补性共同表征目标车辆信息并做特征融合,有效提高复杂场景下车辆跟踪算法的稳定性.
(1) 初始化.
利用中心坐标、运动速度以及尺度变化因子共同构成目标状态向量X=[svLρΔxΔy],其中:s为粒子的位置;v为运动速度;L、ρ为目标框的长与宽;Δx、Δy为x、y方向上对应的尺度变化因子.首先,从初始帧图像中获得目标区域,提取色相、饱和度、明度(HSV)加权颜色直方图和LBP直方图作为目标模板.
(2) 状态模型.
连续两帧间目标的速度变化较慢,可近似为匀速运动模型实现目标的状态转移过程,即
Xt=GXt-1+Bvt-1+Cμt-1
(1)
式中:Xt和Xt-1分别为当前时刻t与上一时刻t-1的目标状态向量;G、B、C为常量;vt-1为上一时刻的目标运动速度;μt-1为上一时刻的过程噪声.
为了更准确地表达目标跟踪过程,对式(1)中的运动速度进行改进,如下式所示:
(2)
(3) 观测模型.
观测模型根据目标模板与粒子候选模板之间的相似性更新粒子权值,高相似度粒子得到的更新权值较大;反之,低相似度粒子得到的更新权值较小.对初始帧目标区域建立颜色特征与LBP特征对应的目标模板,计算后续帧里候选区域的特征直方图,并与目标模板进行相似性对比,得到各粒子不同特征的权值,并通过特征融合策略得到粒子更新权值.
(4) 估计目标位置.
通过最小均方差准则确定目标位置,粒子权值大小代表样本相似度大小,通过对粒子加权求和得到目标的估计位置,考虑到每个粒子状态量及权值,粒子权值越大,与目标模板相似度就越高,对目标估计结果的贡献就越大.具体表达式如下:
(3)
(5) 目标模板更新.
跟踪过程中,目标物体的特征可能会发生运动姿态变化、光照及自身形变等变化,因此对目标模板进行策略性地调和更新,保证目标跟踪的准确性.
(6) 重采样.
算法采用重采样的方法将偏离目标权值较小的粒子剔除掉,对权值较大的粒子进行复制,并使每个样本粒子权值相等,可以缓解粒子退化对跟踪过程的影响.
1.2 自适应插值飞蛾扑火算法
1.2.1飞蛾扑火算法 飞蛾扑火算法具体过程如下.
(1) 飞蛾种群的初始化.
设飞蛾种群的向量集合为M(n1×n2),其中:n1为飞蛾总数;n2为样本维数.飞蛾的适应度矩阵为OM(n1×1);火焰矩阵F与火焰适应度矩阵OF是由飞蛾种群M及适应度矩阵OM根据适应度大小排序得到的,火焰F为飞蛾种群M在当前迭代搜索中的最优解.
(2) 位置更新机制.
飞蛾围绕火焰做对数螺旋曲线运动的位置更新机制可以分为飞蛾扑火和飞蛾弃焰两个过程,其中飞蛾扑火是指第i(i=1, 2, …,n1)只飞蛾Mi根据自己的趋光生物特性,寻找与其距离最近的第q个火焰Fq,并围绕对应的火焰做如下所示的对数螺旋曲线运动:
(5)


图1 飞蛾运动轨迹图Fig.1 Moth tracks
(3) 飞蛾弃焰.
由于飞蛾在搜索空间相对于多个火焰运动,搜寻最优解效率较低,应利用下式使火焰数目在迭代过程中实现自适应减少:
(6)
式中:nF为当前火焰的数量;round为向上取整;l为当前的迭代次数;lmax为规定的最大迭代次数.
1.2.2改进的自适应插值飞蛾扑火算法 本文利用MFO算法迭代过程中火焰的变化趋势,提出自适应插值飞蛾扑火优化 (AIMFO) 算法,具体设计策略如下.
(1) 插值策略.
自适应飞蛾扑火算法中飞蛾围绕火焰做如式(5)所示的对数螺旋线运动,受参数r的影响,飞蛾及火焰位置的更新具有较大的随机性.考虑到火焰位置的历史变化因素,在现有飞蛾扑火算法设计样条插值预测策略的基础上,提出插值飞蛾扑火优化 (IMFO) 算法,利用迭代中火焰位置的变化趋势,提高飞蛾扑火算法的收敛速度和寻优精度.
本文所采用的三次样条函数如下所示.
给定区间[α,β],可划分为α=θ0<θ1<…<θn-1<θn=β,若φ函数满足:对于每一个划分的小区间均为三次多项式;除区间端点外的每个内节点均满足二阶连续可导;若对于节点θk给定函数值δk=f(θk),并成立φ(θk) =δk,则称φ(θk)为f(θk)在该划分区间的三次样条插值函数.

(7)

通过大量实验并考虑到算法的优化问题,本文选取迭代过程中的最优火焰作为被样条插值拟合预测的对象,保存其近三代历史位置(g=3), 即每3次迭代后进行1次插值预测,每4次为一轮,依次循环直到算法达到预先设置的迭代次数.
(2)自适应惯性权重.
惯性权重对于平衡全局搜索能力及局部搜索能力非常重要.飞蛾扑火算法的自适应策略与其他算法不同,在飞蛾扑火算法中,自适应权重始终应加在更新的飞蛾上.第i只飞蛾的自适应权重wMi如下式所示:
(8)
式中:OMi为排序后第i只飞蛾的适应度.当l逐渐增大时,wMi趋向于1.引入权值的位置更新策略如下式所示:
(9)
在插值飞蛾扑火算法的位置更新机制中设计自适应惯性权重策略,可以在迭代前期使得算法不易快速收敛到局部最优解;在迭代过程中跳出局部最优,从而寻求全局最优;在迭代中后期,权重趋向于1,保证局部最优解的精确度.自适应插值飞蛾扑火算法的具体流程如图2所示.

图2 AIMFO算法流程Fig.2 Flow chart of AIMFO algorithm
1.3 改进的飞蛾扑火对比实验
为了验证自适应插值飞蛾扑火算法的性能,利用Q1、Q2两个单峰测试函数Sphere和 Schwefel’ s 2.22,及Q10、Q12两个多峰测试函数Ackley和Penalized1评价IMFO算法的有效性,三维仿真图如图3所示,其中:γ1、γ2为2个维度.

图3 测试函数三维图Fig.3 3D graph of test functions
设置自适应权重粒子群优化的粒子滤波优化(AWPSO)[15]算法中的学习因子c1=c2=2,惯性权值最大值为wmax=0.9,最小值为wmin=0.4,测试函数的维数设定为10,为了保持实验环境及参数的一致性,设5种算法的种群大小均为30,迭代次数为500.表1列出了AWPSO、MFO、IMFO、自适应飞蛾扑火优化(AMFO)、AIMFO算法经过测试函数20次测试的均值、标准差和最优值.

表1 5种算法在测试函数上的实验对比Tab.1 Experimental comparison of five algorithms in test functions
对比上述算法在4种函数上的测试可知,IMFO算法由于插值的引用在一定程度上改进了优化能力.在此飞蛾扑火算法基础上引入自适应惯性权重可以看出,AMFO算法在单峰函数的寻优精度相比于IMFO算法改善较大,在多峰函数上的精度也有一定的提升.而AIMFO算法在均值、最优值及标准差的表现均最优,寻优精度高且稳定性表现较好,可以在迭代中跳出局部最优,具有较强的全局寻优能力.由此可见,本文设计的AIMFO算法在收敛精度以及稳定性能上均优于MFO、IMFO、AMFO、AWPSO算法.无论在单峰函数Sphere、Schwefel’ s 2.22,或多峰函数Ackley、Penalized1上,AIMFO算法的寻优精度和优化能力较高,具有较好的鲁棒性和全局寻优能力.
2 多特征AIMFO-PF车辆跟踪算法
PF算法在应用过程中会出现粒子退化现象,即随着算法的迭代运算,部分粒子的作用逐渐退化,权值逐渐变小,导致近似估计的结果与真实值偏差较大,还会降低算法运行速度.若采用重采样的方法直接舍弃小权值粒子,复制大权值粒子,将会导致样本多样性损失.因此,将AIMFO算法与多特征自适应融合粒子滤波车辆跟踪算法综合考虑,在建立多特征融合观测模型的基础上,利用AIMFO算法驱动粒子朝着高似然区移动,有效解决粒子退化的问题,减少样本使用数目和运行时间,提高算法在复杂场景中的跟踪精度和稳定性,得到多特征AIMFO-PF车辆跟踪算法.主要改进如下.
(1) 设置自适应分层阈值.
设计自适应分层阈值,将样本粒子分为高、低权值粒子层,对低权值粒子层的粒子进行AIMFO迭代优化,不仅能合理地优化粒子分布状态,还能有效避免高权重粒子层的粒子因受整体搜索影响而向局部最优粒子靠近.设粒子分层阈值为
KFC=h1wS
(10)
式中:wS为粒子排序后的最优粒子权值;h1为调节系数,用于调整阈值对粒子高低层的划分,取值范围为(0, 1).将权值高于该阈值的粒子分至高层区,将小于该阈值的粒子分到低层区.虽然仅对低层的粒子进行AIMFO优化,但是处于高层的粒子信息将被用来引导低层粒子向高似然区运动,从而合理地优化粒子在状态空间中的分布.
(2) 设计新的适应度函数.
利用插值飞蛾扑火优化粒子滤波算法,使粒子朝着更优的高似然区移动,需要将系统的最新观测信息引入AIMFO算法,即利用系统观测信息定义AIMFO算法的适应度U,如下式所示:
(11)

(3) 设置AIMFO算法终止条件.
为了控制AIMFO算法对粒子的优化始终朝高似然区移动的同时,保证粒子合理的覆盖在最优值的周围,防止过于聚集,本文将从最大迭代次数和终止阈值两方面来确定AIMFO迭代终止条件,即当算法满足阈值终止条件时停止搜索,否则继续迭代至最大迭代次数.其中,终止阈值根据式(10)所示的分层阈值进行设置,如下式所示:
KTZ=h2KFC
(12)
式中:h2为(0, 1)范围的调节系数.当迭代寻优过程中的所有粒子权值都大于该阈值时停止迭代,否则继续迭代至最大迭代次数停止.多特征AIMFO-PF车辆跟踪算法流程如图4所示.
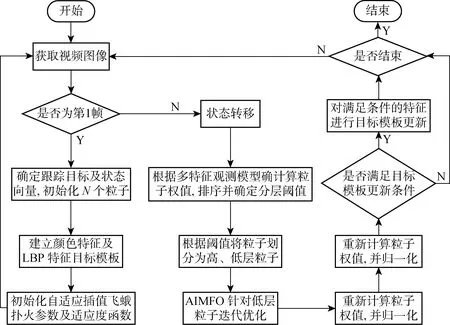
图4 多特征AIMFO-PF车辆跟踪算法流程图Fig.4 Flow chart of multi-feature AIMFO-PF vehicle tracking algorithm
3 实验结果与分析
3.1 车辆跟踪实验设置
为了验证AIMFO算法能够有效提高MAFPF车辆跟踪算法的精度和稳定性,设本文提出的自适应插值飞蛾扑火优化-多特征粒子滤波车辆跟踪算法的样本粒子数NAI-PF=20,MAFPF车辆跟踪算法的样本粒子数为NMAF=20, 100,分析比较本文算法与MAFPF车辆跟踪算法取较多和较少粒子时的跟踪效果;此外,为了进一步证明本文算法的跟踪性能,与自适应权重粒子群优化的粒子滤波算法[14]进行比较,并且为了对比本文提出的AIMFO算法与AWPSO应用于粒子滤波跟踪算法的优化效果,且保持实验的一致性,实验设定将文献[14]中基于颜色特征的粒子滤波跟踪算法替换为多特征自适应融合粒子滤波车辆跟踪算法,再进行实验分析,并设样本粒子数NAW-PF=20.在保证本算法精度不变的同时满足跟踪的实时性,设学习因子c1=c2=2,惯性权值w随个体适应度值自适应地改变,其中最大值为wmax=0.9,最小值为wmin=0.4.
本文算法旨在多种复杂环境下实现目标的精确实时跟踪.目前,公开数据集成在同一时刻出现多种复杂环境的情况较少,因此本实验采用自建数据集进行测试,通过多角度、多场景构建出目标车辆姿态及尺度变化、复杂环境干扰、遮挡、光照变化等较难处理的混合场景.数据集包括无人机角度,后方车辆角度跟拍场景各3组,每组序列大小为500帧,各序列中包含多种不同的干扰环境.本实验选取其中3组视频序列分别进行定量与定性分析.实验平台为CPU为Intel Core i5-8250U CPU 1.60 GHz、内存为8 GB的计算机,操作系统为Windows 10,软件为MATLAB R2017a.
3.2 定性分析
3.2.1实验一:目标尺度变化、背景干扰、光线变化实验 视频序列1(Seq1)的图像大小为430像素×320像素,视频中车辆经过桥底过程中存在光照变化,并且在行驶过程中,跟踪目标周围还受到其他车辆干扰,导致容易出现跟踪误差及跟踪框偏离.分别利用MAFPF车辆跟踪算法、多特征AIMFO-PF车辆跟踪算法与多特征AWPSO-PF车辆跟踪算法对Seq1进行车辆跟踪实验,选取第35、86、114和218帧关键帧的跟踪结果进行对比分析,如图5所示.由图5(a)和5(b)可以看出,目标车辆在受到周围车辆干扰和光照变化时,MAFPF车辆跟踪算法在粒子数NMAF=20的情况下,跟踪框易偏离目标区域,跟踪不稳定,而将NMAF增大至100以后,该算法的跟踪精度和稳定性都有一定提升.从图5(c)和5(d)的结果来看,在粒子数NAI-PF=NAW-PF=20时,多特征AWPSO-PF 车辆跟踪算法相对较为稳定,但在后续定量分析中跟踪速度较慢.多特征 AIMFO-PF 车辆跟踪算法在关键帧可以始终稳定地跟踪目标,跟踪效果良好.
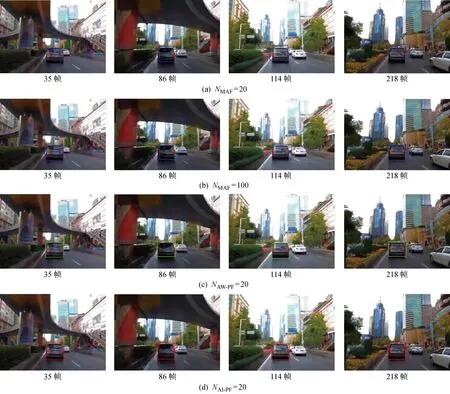
图5 实验一的结果Fig.5 Results of Experiment 1
3.2.2实验二:目标姿态变化、尺度变化、背景干扰、遮挡实验 视频序列2(Seq2)的图像大小为320像素×240像素,视频中会出现目标车辆近距离靠近行人和目标车辆被监控设备遮挡的场景.同时,目标车辆的尺度和姿态在行驶过程中也会发生变化,视频跟踪难度较大.利用不同算法针对Seq2进行车辆跟踪实验,选取第39、67、84和126帧关键帧的跟踪结果进行对比分析,如图6所示.
由图6可以看出,MAFPF在NMAF=20时,跟踪误差较大,稳定性较差,增加粒子数后能够在一定程度上提高跟踪性能,但当目标车辆周围出现行人或被遮挡时,跟踪窗口也会出现偏离,而NAW-PF=20的多特征AWPSO-PF车辆跟踪算法和本文所提算法在受到遮挡及车辆尺度变化时,跟踪准确度还是稳定性都优于NMAF=100时的MAFPF车辆跟踪算法,说明AWPSO以及AIMFO算法都能够在关键帧一定程度上优化粒子在状态空间的分布,而多特征AWPSO-PF车辆跟踪算法在后续的定量分析中精度以及速度都不及多特征AIMFO-PF车辆跟踪算法.
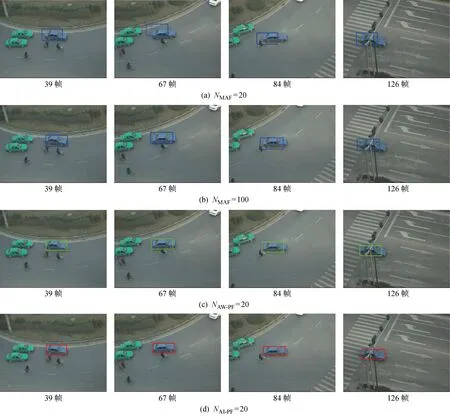
图6 实验二的结果Fig.6 Results of Experiment 2
3.2.3实验三:目标尺度变化、光照变化、遮挡实验 视频序列3(Seq3)的图像大小为700像素×540像素,目标车辆在树荫下行驶或被树木遮挡引起光照变化.利用不同算法针对Seq3进行车辆跟踪对比实验,并选取第84、123、175和235帧关键帧的跟踪结果进行分析,如图7所示.由图7(a)可知,NMAF=20的MAFPF车辆跟踪算法在第84帧目标车辆出现光照变化时,跟踪框开始偏离目标;在第123、175帧目标车辆被树木遮挡时,跟踪框偏差较大;在第235帧目标尺度较小时,跟踪框大于目标本身,包含了较多的背景信息.由图7(b)可知,MAFPF车辆跟踪算法在NMAF=100时,跟踪效果有所提升,但在遮挡、光照变化等情况下仍存在较大偏差.由图7(c)可知,多特征AWPSO-PF车辆跟踪算法跟踪效果相对比较稳定,但在175帧及235帧中跟踪框有一定的漂移.由图7(d)可知,无论是光照变化、遮挡还是目标尺度变化时,所提算法都能够更加准确地定位跟踪到目标车辆.

图7 实验三的结果Fig.7 Results of Experiment 3
3.3 定量分析
为了更精确地验证自适应插值飞蛾扑火优化多特征粒子滤波车辆跟踪算法的优越性,对上述的实验结果做进一步的定量分析,即以平均中心位置误差、平均重叠误差、跟踪成功率和运行时间为评价指标,定量的分析目标车辆的跟踪结果.
(1) 中心位置误差由跟踪算法得到的目标中心位置与真实目标中心位置之间的欧式距离来表示,则各帧目标车辆的中心位置误差为
(13)
式中:(xtru,ytru)为真实的目标区域的中心点位置;(xtra,ytra)为跟踪算法得到的目标中心点位置.则x轴与y轴方向的距离误差可以分别表示为
(14)
(15)
式(13)仅计算了单帧的中心位置误差,不能反映算法对于整个视频序列的跟踪效果.因此,将序列中所有图像的中心位置误差相加求均值,用得到的平均中心位置误差来描述对视频的整体跟踪效果.设视频序列共有η帧,则平均中心误差可以表示为
(16)

(2) 重叠率由跟踪算法得到目标框与真实目标区域重叠部分的占比得到,设真实的目标区域表示为Atru,跟踪算法得到的目标区域表示为Atra,则各帧的重叠率可表示为
(17)
式中:|Atru∩Atra|为跟踪算法得到的目标区域与真实标注的目标区域之间的重叠面积;|Atru∪Atra|为跟踪算法得到的目标区域与真实标注的目标区域面积总和.所得到的重叠率ROS越大,表示算法的跟踪效果越好.与中心位置误差同理,式(17)仅计算了单帧的重叠率,需要对序列中所有图像的重叠率求平均,才能描述整体跟踪效果.平均重叠率为
(18)
(3) 成功率.设置一个阈值(文中取为0.5),计算各帧的重叠率.当得到的重叠率大于这一阈值时,表示这一帧的跟踪是成功的,统计并计算重叠率高于阈值的帧数占总帧数的比值,就可以得出车辆跟踪算法的成功率.


图8 Seq1的位置误差及重叠率Fig.8 Position error and overlap ratio of Seq1

表2 Seq1的客观评价表Tab.2 Objective evaluation table of Seq1
由图8可以看出,MAFPF车辆跟踪算法的位置误差及重叠率曲线变化剧烈,算法易受干扰,尤其是在粒子数较少的情况下.而本文算法与多特征AWPSO-PF车辆跟踪算法无论是中心位置误差、x轴与y轴方向的位置误差还是目标区域重叠率指标,都明显优于不同粒子数目下的MAFPF车辆跟踪算法,且相比于多特征AWPSO-PF车辆跟踪算法,本文算法的位置误差更小、目标区域重叠率更大.由表2可以看出,相比于NMAF=20, 100时的MAFPF车辆跟踪算法以及多特征AWPSO-PF车辆跟踪算法,本文算法的平均中心误差分别降低了12、3、2个像素,平均重叠率分别提高了24.01%、6.27%、2.42%,成功率达到100%,跟踪精度及稳定性明显优于其他算法.此外,本文算法利用AIMFO优化粒子在状态空间的分布,减少了粒子的使用数目,同时优化过程仅针对低权值层粒子,当算法满足终止阈值时停止迭代,避免算法每次都迭代至最大迭代次数而损失粒子多样性.虽然在利用AIMFO算法优化的同时,最低限度的引入了该算法的计算复杂度,跟踪速度相比于NMAF=20下的MAFPF算法低, 但满足实时性要求(能达到27帧/s),同时跟踪性能有较大的提升.相比于NAW-PF=20的多特征AWPSO-PF车辆跟踪算法和NMAF=100的MAFPF车辆跟踪算法的运行速度提升幅度大,满足实时性的要求.因此,引入的计算复杂度带来的性能提升是可观的.综合来看,本文算法的跟踪精度更高、稳定性和实时性更好.

图9 Seq2的位置误差及重叠率对比图Fig.9 Position error and overlap ratio of Seq2

表3 Seq2的客观评价表Tab.3 Objective evaluation table of Seq2
对比图9各算法的评价指标结果来看,本文算法的中心位置误差、x轴与y轴方向的位置误差以及重叠率基本优于其他跟踪算法,其中粒子数为NMAF=100的MAFPF车辆跟踪算法,虽然在个别帧的误差及重叠率指标优于本文算法,但其指标曲线波动较大,如在第114、126帧时,中心误差超过17个像素,在第31、69和75帧时重叠率不到55%,整体效果不及本文算法.从表3的数据来看,在跟踪精度方面,相比于NMAF=20, 100时的MAFPF车辆跟踪算法以及多特征AWPSO-PF车辆跟踪算法,本文算法的平均中心误差分别降低了6、2、1个像素,平均重叠率分别提高了14.56%、3.27%、1.46%,对于Seq2视频序列的整体跟踪精度优于其他算法.在运行时间方面,本文算法的运行速度达到30帧/s,满足实时性要求.综合来看,本文算法的跟踪精度更高、稳定性和实时性更好.
对比图10的客观评价结果,从图10(a)所示的中心位置误差来看,前110帧内,各算法中心位置误差相近,120帧后,NMAF=20, 100时的MAFPF车辆跟踪算法的中心位置误差明显增大,而本文算法中心位置误差除个别帧外整体低于其他算法.从图10(b)所示的重叠率曲线来看,本文算法与多特征AWPSO-PF车辆跟踪算法的重叠率曲线变化不大,除个别帧外,重叠率基本处于75% 左右,而NMAF=20, 100时的重叠率从180帧开始呈下降趋势,到230帧后,重叠率仅为40%左右.分析表4的统计数据,从跟踪精度来看,相比于NMAF=20, 100时的MAFPF车辆跟踪算法以及多特征AWPSO-PF车辆跟踪算法,本文算法的平均中心位置误差分别降低了2、1、1个像素,平均重叠率分别提高了17.41%、15.45%、2.91%,成功率分别提升了34%、33.67%、0.67%,本文算法的跟踪精度和稳定性明显优于其他算法.从运行速度来看,本文算法运行速度达到29帧/s,运行速度相对较快,满足实时性要求.综合来看,本文算法跟踪性能更好.
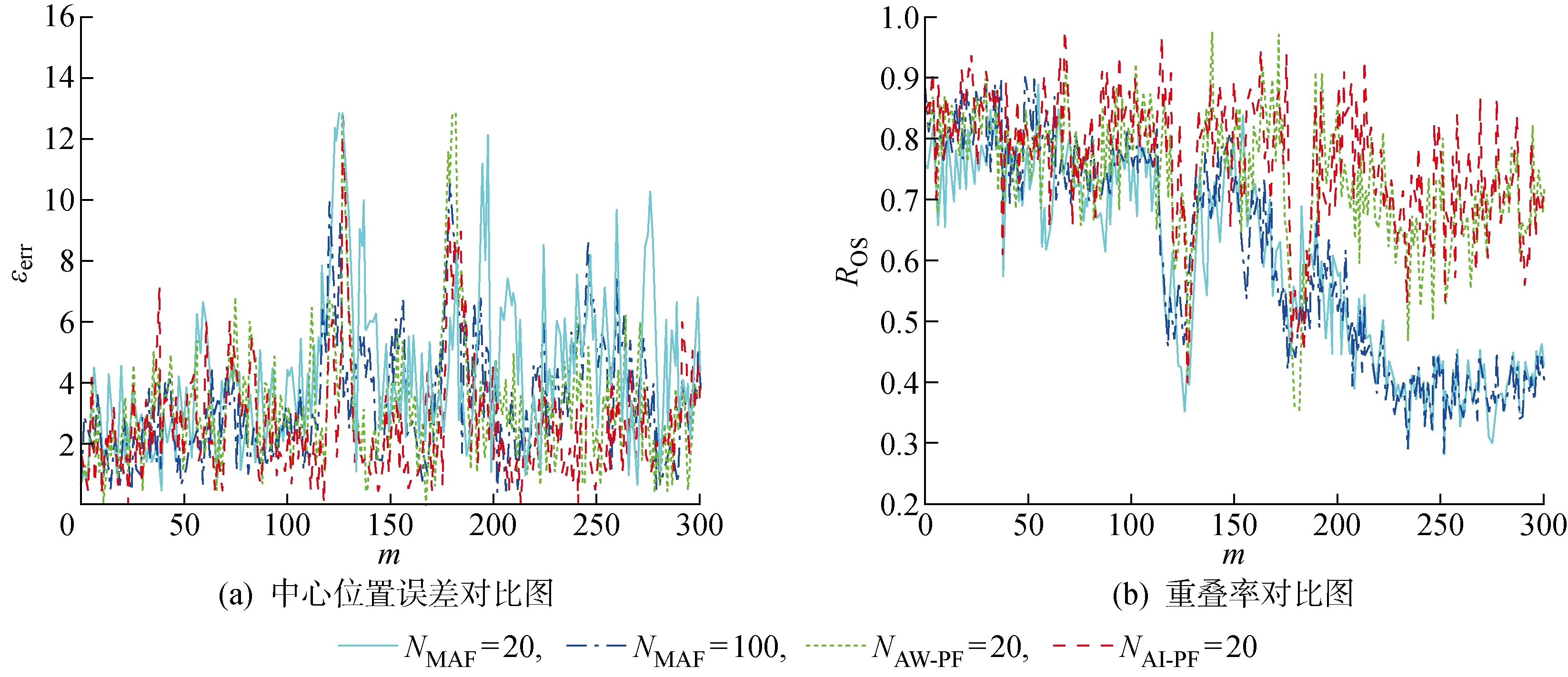
图10 Seq3的位置误差及重叠率对比图Fig.10 Position error and overlap ratio of Seq3

表4 Seq3的客观评价表Tab.4 Objective evaluation table of Seq3
5 结语
本文在MAFPF车辆跟踪算法的基础上,针对跟踪过程中的粒子退化现象,从调整优化粒子状态空间分布的角度出发,提出自适应插值飞蛾扑火优化多特征粒子滤波车辆跟踪算法.首先,利用自适应惯性权重增强飞蛾扑火算法的全局搜索能力,并用样条插值改进飞蛾扑火算法,提高算法收敛速度和优化性能.然后针对基本粒子滤波算法中样本退化的问题,设计自适应插值飞蛾扑火优化粒子分布的方法,使低权值层粒子向权值较高的区域移动,提高样本粒子的有效性.最后将插值飞蛾扑火优化粒子分布的方法移植到MAFPF车辆跟踪算法中,有效避免粒子退化,提高跟踪精度和运行速度.实验表明,本文算法能够提高算法的跟踪性能,在目标姿态、尺度变化、遮挡、光照、背景干扰等复杂交通场景下能够准确、稳定、实时地跟踪车辆目标.本文未来的研究方向是在图形处理器等环境下充分结合并行计算的优势,进一步提升算法的实时性.
猜你喜欢
农业工程学报(2022年10期)2022-08-22
成都信息工程大学学报(2022年3期)2022-07-21
导航定位学报(2022年3期)2022-06-10
北京航空航天大学学报(2019年9期)2019-10-26
新生代(2018年16期)2018-10-21
科技视界(2018年3期)2018-04-02
城市地理(2017年9期)2017-11-02
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
计算技术与自动化(2014年1期)2014-12-12
