自主水下航行器导航与定位技术
2022-03-07 03:58肖家耀XIAOJiayao
价值工程 2022年8期
肖家耀 XIAO Jia-yao
(中海油田服务股份有限公司,天津 300459)
0 引言
众所周知,海洋所蕴含的自然资源是地球上最丰富的但同时也是人类目前探索最少的地方。随着人类在利用海洋和开发海洋上的投入不断增大,自主水下航行器(AUV)引起了越来越多的关注[1],特别是在海洋石油勘探开发领域得到了快速发展。AUV是能够在水下自主航行、自动控制、并能按照程序预先规划路径自主完成预定任务的水下集成系统。导航定位技术是AUV的关键技术之一,高精度水下导航定位技术对AUV的安全航行和高效率完成任务具有决定性的作用。
由于无线电信号在水中迅速衰减,AUV无法借助无线电导航系统实现水下远距离、大范围的准确定位,卫星导航定位系统在水下不可用是AUV水下导航定位面临的主要技术挑战之一。在不使用声学基线定位系统的情况下,AUV在水下主要依靠自身搭载的罗经、多普勒计程仪(Doppler Velocity Logger,DVL)或惯性导航系统提供的各类导航信息,通过航位推算模式实现水下导航定位。惯性导航/航位推算方法精度受传感器本身测量精度影响,会随时间迅速积累。在DVL锁定海底并且能够提供有效对地速度辅助导航的情况下,惯性导航/航位推算的导航误差一般为航行距离的0.5-2%,如果使用高精度的惯性导航设备,导航误差能够优于航行距离的0.1%。当在水面时,AUV可以通过GNSS(Global Navigation Satellite System)获得的绝对位置来实时修正惯性导航系统误差。但是定时上浮接收GNSS信号来实现对惯性导航误差的校正在实际应用过程中往往是不现实的,尤其在深水调查作业中。
在过去的二十年间,AUV水下导航定位技术研究取得了实质性的进展。以视觉导航和地磁匹配导航技术为代表的非传统导航方式逐步开始在水下导航中得到应用,并取得了一定的成果。除此之外,用于解决机器人导航定位的同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)算法技术日渐成熟,在水下导航定位方面的应用研究也取得了一定的理论和实践成果[2]。
AUV水下导航定位技术主要可以归纳为以下几类:
1 惯性导航系统
AUV可以通过测量其行进的距离和方向来确定其在海上的位置,称为航位推算。航位推算(Dead reckoning)是一种完全依靠自身设备而无需其他定位支持即可自主解决载体当前位置的方法。在航位推算模式下,AUV可以根据其出发点的位置、行进方向和速度或加速度矢量来估计其当前的位置。
惯性导航系统是完全依靠自身设备进行导航的一种无源系统。AUV的初始位置由全球卫星导航定位系统确定,AUV的航向、姿态和加速度信息由惯性测量传感器实时提供。惯性导航系统综合以上信息就可以实时解算出AUV在水下的实时位置。本质上,惯性导航属于一种航位推算导航,即从给定的初始位置开始,根据运动体在该点的航行速度、航行方向和航行时间,推算出下一时刻的位置信息的导航过程。惯性导航系统不依赖任何外界信息,数据更新率搞、短期精度和稳定性好[3],是目前AUV主要的导航定位方式。
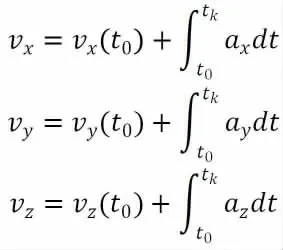
惯性导航系统的核心器件为加速度计和陀螺仪。惯性导航系统在正式工作之前,首先要经过初始化对准,使平台坐标系按导航坐标系定向,为加速度计提供一个高精度的测量基准。在AUV航行过程中,惯性导航系统利用陀螺仪使平台始终跟踪当地水平面,三个轴始终指向东、北、垂向方向。在这三个轴上的加速度计分别测量北向加速度ax、东向加速度ay和垂向加速度az。在tk时刻时,将这三个方向上的加速度分量进行一次积分,便可得到AUV沿三个方向的速度分量为:
再次通过对速度积分,即可得到tk时刻AUV在导航坐标系中的绝对位置,即:
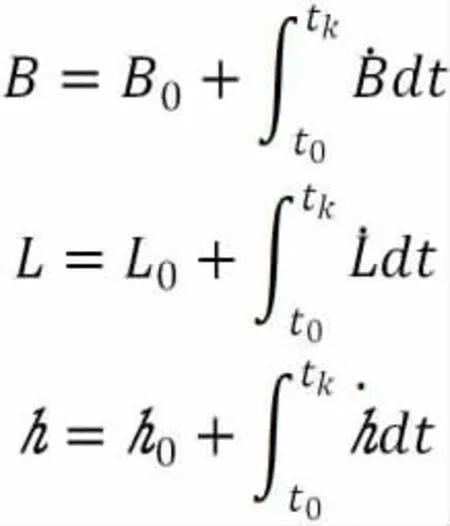
式中,B、L、h为AUV在tk时刻的纬度、经度和高程;B0、L0、h0为AUV在初始时刻t0的位置,可由GNSS提供;B˙、L˙、h˙分别表示纬度、经度和高程的时间变化率,可以由以下公式解算:
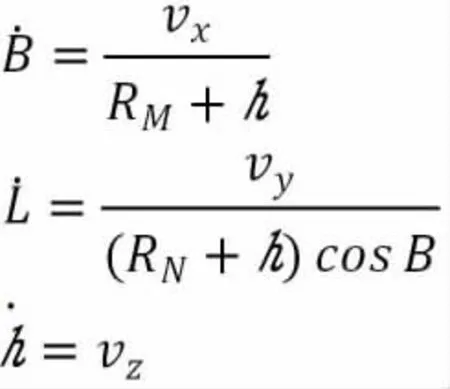
式中RM、RN分别表示地球子午圈、卯酉圈的曲率半径。
惯性导航主要元件陀螺仪的漂移误差和加速度计的零位偏值是影响惯导系统精度的最直接的和最重要的因素,会导致惯性导航存在积累误差,因而难以长时间独立工作。在实际应用中,通常利用各种外部辅助导航设备,如多普勒计程仪(DVL)等,取长补短,应用现代滤波理论和信息融合技术对惯性导航的累计误差进行补偿。
2 水下声学定位系统
水下声学定位是一种重要的水下导航定位方法,具备稳定的高精度定位能力,能够为各类深海探测装备提供绝对位置信息[4]。它是通过测量水下声源所辐射的声信号从发射到接收所经历的时间及声速来确定声源到各接收点的距离,从而实现对目标进行定位的。但声学定位存在数据更新率低,延迟较大等缺点,通常与惯性导航定位系统组合应用于AUV中,用于修正惯性导航系统长时间工作后产生的累计误差。根据定位基线长度,可以将水下声学定位技术分为三类:长基线(Long Base Line)、短基线(Short Base Line)、超短基线(Ultra Short Base Line)。表1列举了这三种水声定位技术的典型基线长度。
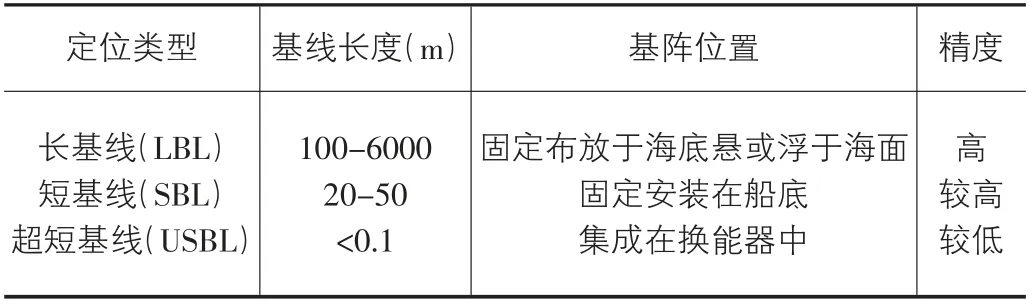
表1 水声定位技术分类
2.1 长基线定位系统
长基线定位系统主要由两部分构成,一部分是安装在水下自主航行器或载体的换能器,另一个部分是布放在海底已知精确地理位置的至少三个声学应答器组成的声学基阵。应答器之间的距离构成基线,基线长度根据工作区域及应答作用距离确定,在上百米到几千米之间。长基线定位系统是通过测量目标与各个声学应答器之间的斜距,采用球面交汇的方法对目标进行定位。
从定位原理上讲,系统导航定位只需要2个海底应答器就可以,但是产生了目标的偏离模糊问题,另外不能测量目标的水深,所以至少需要3个海底应答器才能得到目标的三维坐标[5]。实际应用中,需要接收4个以上海底应答器的信号,产生多余观测,提高测量的精度。系统的工作方式是距离测量(range/range)。长基线定位精度很高,但系统构成复杂,成本昂贵,且需要大量的时间布放和校准水下声学应答器基阵,声学应答器基阵回收程序复杂,且存在丢失的风险。
2.2 短基线定位系统
短基线定位系统定位原理与长基线系统相同。区别在于短基线定位系统的声基阵通常是由安装在船底的换能器组成,换能器之间的距离一般在20-50m之间,换能器之间的相互关系精确测定,组成声基阵坐标系,声基阵坐标系与船舶坐标系的相互关系由常规测量方法确定。短基线系统的测量方式是由一个换能器发射,所有换能器接收,得到一个斜距观测值和不同于这个观测值的多个斜距值,系统根据声基阵坐标系相对于船舶坐标系的固定关系,辅以外部传感器观测值,如GPS、MRU、Gyro提供的船的位置、姿态、船艏向值,计算得到目标的地理坐标。系统的工作方式是距离测量(range/range)。短基线定位系统的定位精度虽然不如长基线,但系统结构较长基线简单,由于其声学基阵在船底安装时已经精确测量校准,更换作业工区不需要重复布放和校准声学基阵,操作相对简单。但目标位置的解算也会受到船体姿态的影响,还需要配备高精度外部传感器获取船体实时的位置、姿态和航向信息。
2.3 超短基线定位系统
超短基线定位系统由水下声学测量设备和水上数据处理设备两大部分组成,其中水下测量设备由安装在船体的声学换能器和安装在水下载体的声学应答器组成[6]。超短基线定位系统所有的收发器基元按照精确的相对位置关系集成安装在声学换能器内部,组成声基阵坐标系,声基阵坐标系与船舶的坐标系之间的关系要在安装时精确测定[7],包括位置偏差、姿态偏差(声基阵的安装偏差角度:横摇和纵摇)和艏向偏差(声基阵坐标系与船舶的坐标系的水平角度偏差)。系统通过安装在船上的声学换能器发射并接收回波信号来确定水下应答器相对于换能器基阵的距离和角度,结合罗经、姿态传感器提供的实时的船姿态与艏向信息以及水面定位系统提供的船舶地理坐标,就可以实时解算出水下应答器所在位置的地理坐标。超短基线定位精度相较于长基线和短基线来说稍低,但其结构简单,安装使用方便,成本较低,对使用载体体积尺寸要求不高,缺点是系统的定位精度受外部姿态校准精度影响较大,安装后必须在作业工区内进行精确校准。
3 地球物理导航
地球物理导航是利用AUV所处环境特征来确定AUV当前的位置。地球物理导航首先需要建立工作区域的特征地图数据库,然后借助合适的传感器探测、识别和分类环境特征,与地图数据库进行特征匹配,获取匹配点的坐标信息即AUV当前位置。根据物理参数的不同,地球物理导航可以分为光学导航、声呐导航。
3.1 光学导航
光学导航使用单目或立体相机捕获海床图像,然后通过图像特征匹配以进行导航。
单目相机将光线通过一系列镜头或定焦来放大远处物体的图像。立体相机在连续图像对之间具有完整的六个自由度变换。由于水下环境中光照不足,相机成像范围较小,因此,水下光学导航方法主要适用于环境特征丰富的小范围区域的导航定位,如船体或沉船检测等。
3.2 声呐导航
声呐导航是利用声学探测方法,识别和提取海底地形或图像等物理特征,与存储在AUV内部特征地图库进行匹配,从而获得AUV的当前位置。声纳可分为成像型(提供海底图像)或测距型(构建海底三维地形或剖面数据)。表2和表3分别列举了几种常用于水下导航的成像声呐和测距声呐设备。
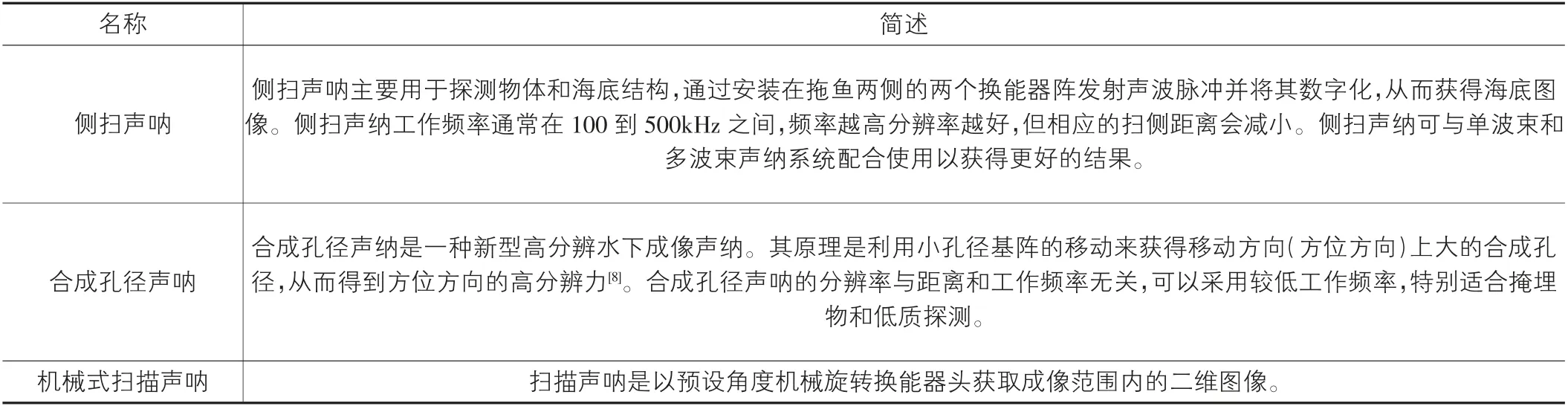
表2 用于水下导航的成像型声呐

表3 用于水下导航的测距型声呐
4 总结
文章回顾了当前AUV中应用的不同水下导航定位技术。AUV的导航定位技术有惯性导航系统(INS)、水下声学定位和地球物理导航。但是,如果AUV上采用上述单一的导航定位方法,其精度、可靠性无法满足水下任务要求,因此低成本、组合式及具有多用途和能实现全球导航的组合导航系统是AUV导航定位技术的发展方向[9]。除此之外,随着导航定位技术的发展,不同的位置估算方法如卡尔曼滤波(KF)、扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)、扩展信息滤波(EIF)、粒子滤波(PF)等组合应用可以获得更为准确的结果。近年来,协同定位和同步定位与地图构建(SLAM)方法逐渐成为AUV导航定位领域的研究热点[10],并在实际应用中取得了一定的进展。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
铁道通信信号(2020年9期)2020-02-06
水下无人系统学报(2018年5期)2018-11-09
声学与电子工程(2017年1期)2017-06-22
铁道通信信号(2016年4期)2016-06-01
中国惯性技术学报(2015年1期)2015-12-19
西北工业大学学报(2015年3期)2015-12-14
声学技术(2015年1期)2015-09-07
城市轨道交通研究(2015年11期)2015-02-27