
基于RCAR H3的智能座舱域控制器设计
2022-03-06 02:43周罗善方佳伟
汽车零部件 2022年2期
周罗善,方佳伟
(上汽大众汽车有限公司,上海 201800)
0 引言
随着汽车级芯片的算力不断提升,域控制器在汽车中的使用正在成为汽车电子领域的研究热点。相较于传统的汽车控制器,域控制器有着力强、资源丰富、功能多样化等特点。域控制器的提出使得整车系统从分布式架构向集中式架构进行转换,解决了分布式架构中信号与信号之间的频繁交互、ECU之间信号同步以及多个ECU的硬件成本等问题。
在汽车行业电动化、网联化、智能化、共享化的大环境下,对于汽车电子电气系统及控制器提出的要求是高计算性能、高通信性能、高效的跨域通信、软件的持续升级更新。电器电子架构也将从模块化方法转换到更为集中的方法(图1)。

图1 汽车电器电子架构的转换
域控制器是高度嵌入式的控制器,软硬件高度集成,通过硬件冗余的方式保证了后续软件更新换代的性能。域控制器的CPU性能十分强大,能够通过软硬件的松耦合保证软件的持续集成更新。
域控制器的分类大致可以分为车身控制域、智能座舱域以及自动驾驶域。各个域之间的功能划分不同也导致所使用的芯片是完全不同的,例如:车身控制域对于可靠性以及实时性控制高,使用的芯片大多数为英飞凌系列芯片;智能座舱域对于娱乐系统以及通信系统的要求高,使用的芯片大多数为瑞萨RCAR系列芯片;自动驾驶域对于传感器融合以及人工智能算法的集成要求高,使用的芯片大多数为英伟达系列芯片。文中设计及研究应用领域为智能座舱,所以选择瑞萨的RCAR H3芯片作为主芯片。
1 智能座舱及RCAR H3芯片资源
智能座舱目前还没有明确的定义,但是智能座舱相较于传统座舱有更丰富的信息、更友好的人机交互。目前人们对于座舱的需求主要体现在信息娱乐、导航、通信、行车参数、导航等方面。
根据智能座舱的需求,RCAR H3芯片拥有40000 DMIPS的处理性能。RCAR H3的芯片资源及其功能应用概述见表1。

表1 RCAR H3芯片资源及智能座舱域功能应用
由表1可知,RCAR H3的外部资源能够满足智能座舱的需求,采用RCAR H3作为智能座舱域控制器的主芯片是合理的。
2 域控制器系统设计
根据RCAR H3的芯片资源,结合整车对于线束、信号、通信各方面的要求,对域控制器进行系统设计。
2.1 视频输出设计
智能座舱域中最重要的功能之一是视频输出,主要应用于汽车导航显示屏、后座娱乐系统、汽车驾驶员辅助系统、车载摄像机系统等。RCAR H3提供了HDMI、RGB以及LVDS 3种类型的视频输出外部接口。
HDMI线束根据接口的不同可以分为A型接口、C型接口以及D型接口。HDMI接口如图2所示。
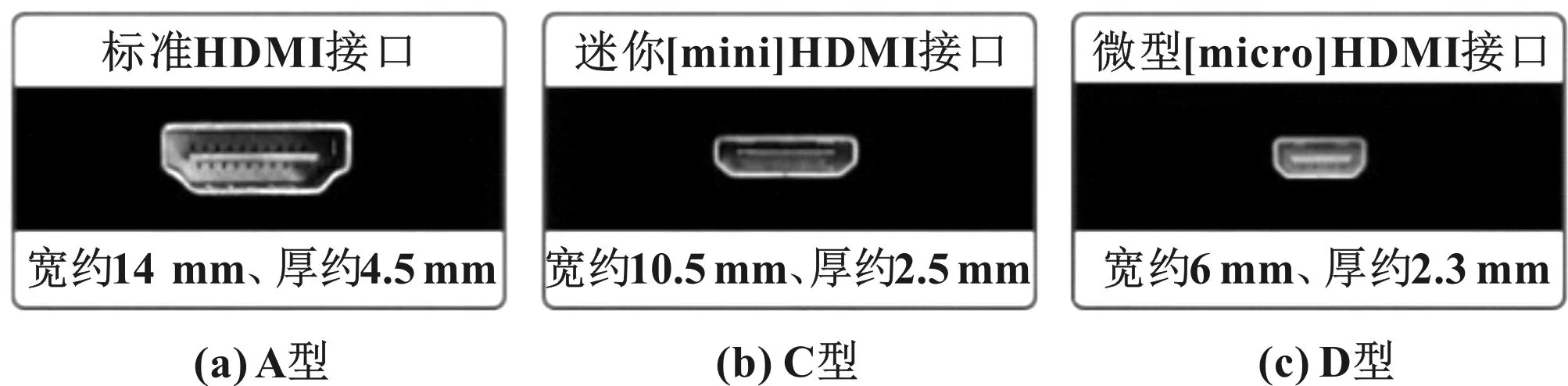
图2 HDMI接口
RGB的外部接口一般使用VGA接口以及DVI接口,如图3所示。
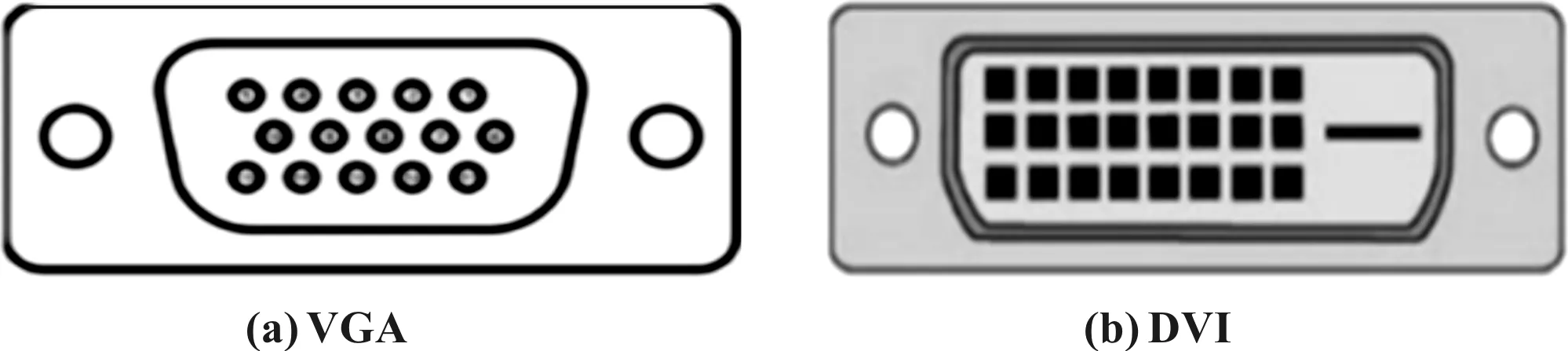
图3 RGB外部接口
LVDS的外部接口一般使用30P/40P通用插座或柔性PCB进行短距离传输,如图4所示。

图4 LVDS外部接口
上述3种接口均无法满足整车对于连接器以及线束的基本要求,所以车载视频传输需要采用串行/解串技术来解决上述问题。目前视频串行解串技术的主流方案为TI的FPD-LINK技术以及Maxim的GMSL技术,文中设计的域控制器采用FPD-LINK的解决方案,选择的型号以及功能见表2。

表2 域控制器串行器选型
通过对于视频信号的串行解串,可以减少外部信号线的数量,同时可以延长传输距离,更加方便整车对于视频相关器件的布置。视频输出系统框图如图5所示。
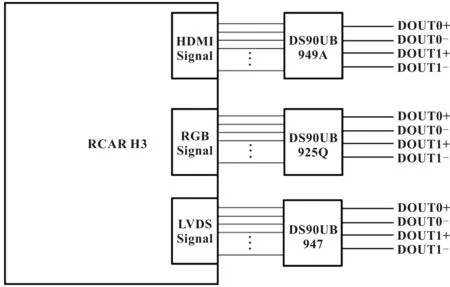
图5 视频输出系统框图
2.2 视频输入设计
智能座舱中的视频输入功能也十分广泛,主要应用于后视摄像头(RVC)、环视系统(SVS)、摄像头监控系统(CMS)、前视摄像头(FC)、驾驶员监控系统(DMS)等。RCAR H3使用3路MIPI接口以及两路数字输入接口,其中两路数字输入接口可以直接使用同轴线以及车规级线束、接插件完成视频传输任务。
传统的MIPI接口使用的外部连接器与图4相同,无法满足车载线束、连接器的要求。所以MIPI接口的使用,同样选择FPD-LINK的解决方案,选择的型号为DS90UB954,该芯片的功能为外部FPD-LINK信号解串为MIPI信号。视频输入系统框图如图6所示。
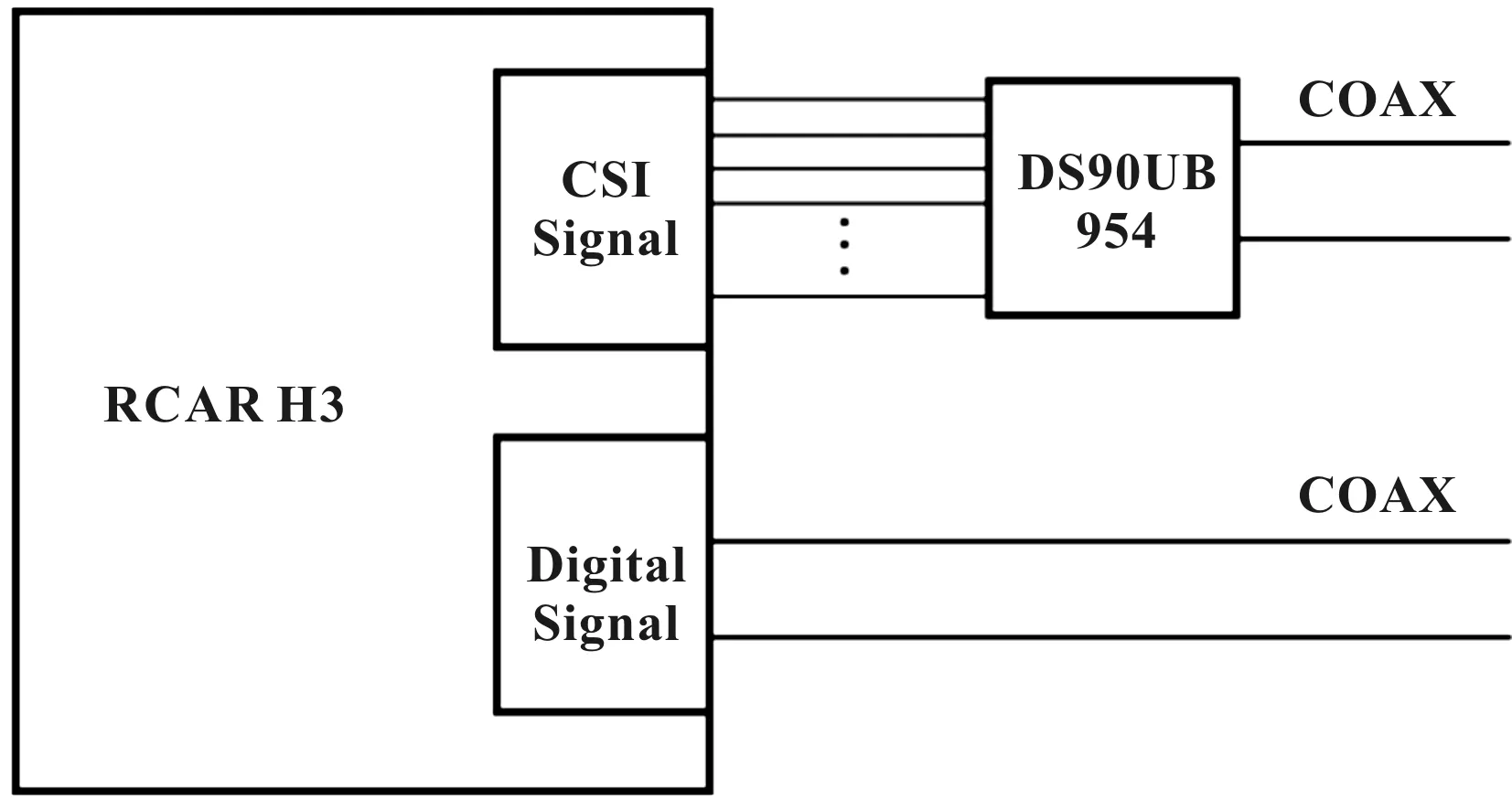
图6 视频输入系统框图
2.3 车内通信设计
智能座舱域作为整车重要的一环,与整车之间的通信是必不可少的。传统ECU通过CAN信号与整车进行信息交互的,而域控制器算力强、资源丰富、功能多样化的特点导致CAN信号所能传输的信息数量远远无法满足域控制器的要求,所以必须采用车载以太网进行数据的传输。
RCAR H3拥有两路CAN/CANFD资源,一路千兆以太网资源。根据域控制器的特点,大量娱乐导航数据的传输无法通过CAN信号进行传输,所以CAN资源在智能座舱域控制器中作为被动CAN使用,同时又由于CAN的实时性要求较高,所以将CAN设备的功能一般设计在RCAR H3的R核内。
根据图1的集中式架构可知一个域控制器需要获取多个ECU的外部信息,ECU与控制器之间采用星型拓扑链接,域控制器此时充当了交换机的角色,仅一路千兆以太网网卡无法实现交换机的功能,所以此处需要设计增加一个车载交换机芯片以满足上述要求。文中采用Marvell的88Q5050方案来完成车载交换机的功能实现,88Q5050是一个通过AEC-Q100认证并拥有总共8路千兆或百兆以太网接口的交换机芯片。RCAR H3芯片的网卡采用RGMII接口,可以用于千兆网络通信,将RCAR H3与88Q5050进行结合,可以完成智能座舱域控制器作为网络中心节点的任务。车载以太网的系统框图如图7所示。
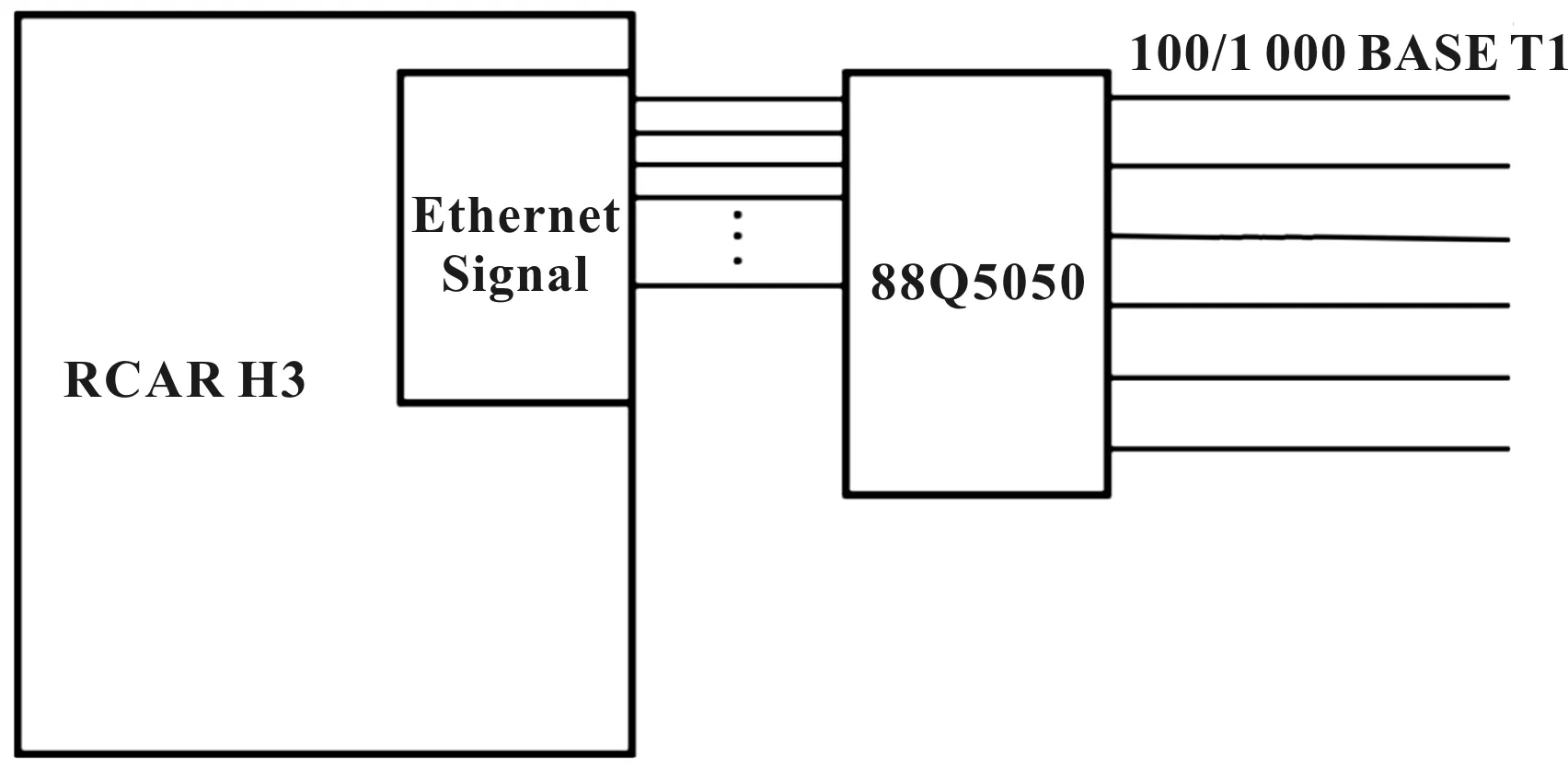
图7 车载以太网系统框图
2.4 电源管理设计
域控制器的功能强大,其功耗也随之增大所以必须使用外部低功耗MCU对域控制器主芯片进行电源管理的逻辑设计,在整车信号唤醒之前,智能座舱域控制器不应该被唤醒,直到车内整车信号被唤醒之后,低功耗MCU对智能座舱的电源管理芯片(PMIC进行控制),完成智能座舱域控制器的唤醒及启动工作。电源管理部分的系统框图如图8所示。

图8 电源管理系统框图
3 域控制器软件设计与实现
域控制器的软件设计相较于传统ECU要复杂得多,其软件架构也与传统ECU之间存在较大差距。文中设计的域控制器的软件架构采用Hypervisor技术,在一个控制器上实现两个客户机,其中一个是Android客户机,主要完成娱乐及导航相关任务;另一个是集成了AUTOSAR Adaptive的Linux操作系统,主要完成与整车以及各个ECU之间安全通信相关的任务。域控制器软件架构如图9所示。
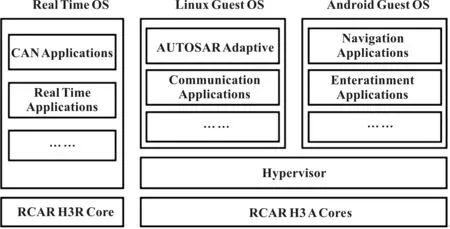
图9 域控制器软件架构
根据第2节中对智能座舱域系统关键部分,以及车载音频总线(A2B)的设计,车载GNSS模组的集成、车载蓝牙/Wi-Fi模组的集成、车载域控制器的外部接口的选型等,完成了基于RCAR H3的智能座舱域控制器的设计与制造。同时,在完成了软件的设计与集成工作之后,该域控制器能够正常工作并实现了导航、通信等功能。基于RCAR H3的智能座舱域控制器实物及实现如图10所示。

图10 智能座舱域控制器实物及实现
4 结论
域控制器的研发及使用是大势所趋,文中根据智能座舱域的应用特征,提出并设计了一款基于RCAR H3的智能座舱域控制器并根据车载控制器的特点及要求做出相应的设计。
在智能座舱域领域中,汽车导航显示屏、后座娱乐系统、后视摄像头(RVC)、环视系统(SVS)等应用是最为重要且基本的,必须对视频输入输出的系统解决方案做出合理的设计以满足用户良好的客户体验。智能座舱域控制器作为整车领域中的一部分,还必须要完成车内通信的设计,由于域控制器的数据量大,所以采用车载以太网进行通信,而CAN通信在域控制器中大多设计为被动CAN。由于采用了功能强大的域控制器,所以其功耗也随之增大,必须对域控制器进行合理的电源管理才能够保证整车不会亏电。
区别于传统ECU,域控制器硬件的冗余设计也保证了在软件上能够设计得更为复杂,特别是对于Hypervisor的使用,能够让域控制器更好地发挥其性能。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年10期)2022-06-09
教育周报·教研版(2022年12期)2022-05-10
汽车实用技术(2022年5期)2022-04-02
孩子(2021年6期)2021-06-15
中学生数理化·高一版(2017年1期)2017-04-25
新高考·高一物理(2014年4期)2014-09-17
中学生数理化·高考版(2008年2期)2008-11-01
