颅颌面整形手术机器人在颏部水平截骨手术中的精确性分析
2022-03-05 06:32孙铁成杨斌王豫杨青孙志彬
组织工程与重建外科杂志 2022年1期
孙铁成 杨斌 王豫 杨青 孙志彬
颏部发育不全是下颌发育不全的一种形式,其中以小颏畸形较为常见。颏部的畸形会导致面部整体的畸形并影响面部美观[1],患者可能产生心理问题并影响其自身的社交、工作、学习等[2]。颏部水平截骨手术已经成为一种公认的治疗颏部发育不全的有效手术方法,常被用于改善面部轮廓[3]。随着三维数字化技术的发展,术前三维手术模拟设计已经在颏部水平截骨手术中广泛应用,但是在实际操作中,术者无法保证能完全按照手术模拟的设计进行截骨,往往存在角度、距离、方向位置等的偏差。近年来,随着对手术机器人技术的不断研究,机器人辅助下的外科手术得到了长足的发展。因其具备微创、精确、并发症少的特点,临床应用愈加广泛[4-8]。颅颌面外科手术机器人尚处于研究阶段[9-10],其精确性尚需验证。本研究利用颅颌面整形手术机器人对接受颏部水平截骨的小颏畸形患者的等比例石膏模型进行与临床相同的手术,对比两种方式手术操作的精确性。
1 资料与方法
1.1 患者选择标准
纳入标准:①临床资料完整;②因单纯小颏畸形而对自身正面及侧面观不满意;③无明显的颏部偏斜畸形;④无颅颌面手术史及严重外伤史;⑤术前行三维数字化颏部水平截骨前移手术模拟,且术中未改变手术方式。
排除标准:①有过颏部注射填充、假体植入等治疗史;②存在咬牙合畸形或处于畸形矫正期;③有明显的颌面部或颅脑畸形导致的颏部畸形;④伴有先天性疾病或全身系统性疾病;⑤伴有其他类型的软组织异常。
1.2 一般资料
选取2015 年1 月至2020 年12 月收治的10 例典型小颏畸形患者,所有患者均采用数字化三维技术进行术前颏部水平截骨前移的手术模拟,并按照模拟方案进行手术操作。由于性别、民族、患者骨质密度等差异会导致研究误差,本次选取的病例均为青年女性患者,年龄21~36 岁,平均(28.6±4.95)岁,术后随访6~12 个月,平均(10±3)个月。
本研究经我院医学伦理委员会审核批准,所有患者知情同意。
1.3 方法
1.3.1 术前测量及手术模拟
所有患者均在术前行头颅CT 扫描,将DICOM格式的CT 数据导入ProPlan CMF 3.0 软件(比利时Materialise 公司)进行三维重建,以我们的前期实验为基础,于三维重建模型上设定测量项目指标及参考平面(图1),并进行术前测量(表1~3),本研究选取的均未矢状方向小颏畸形的患者[11]。
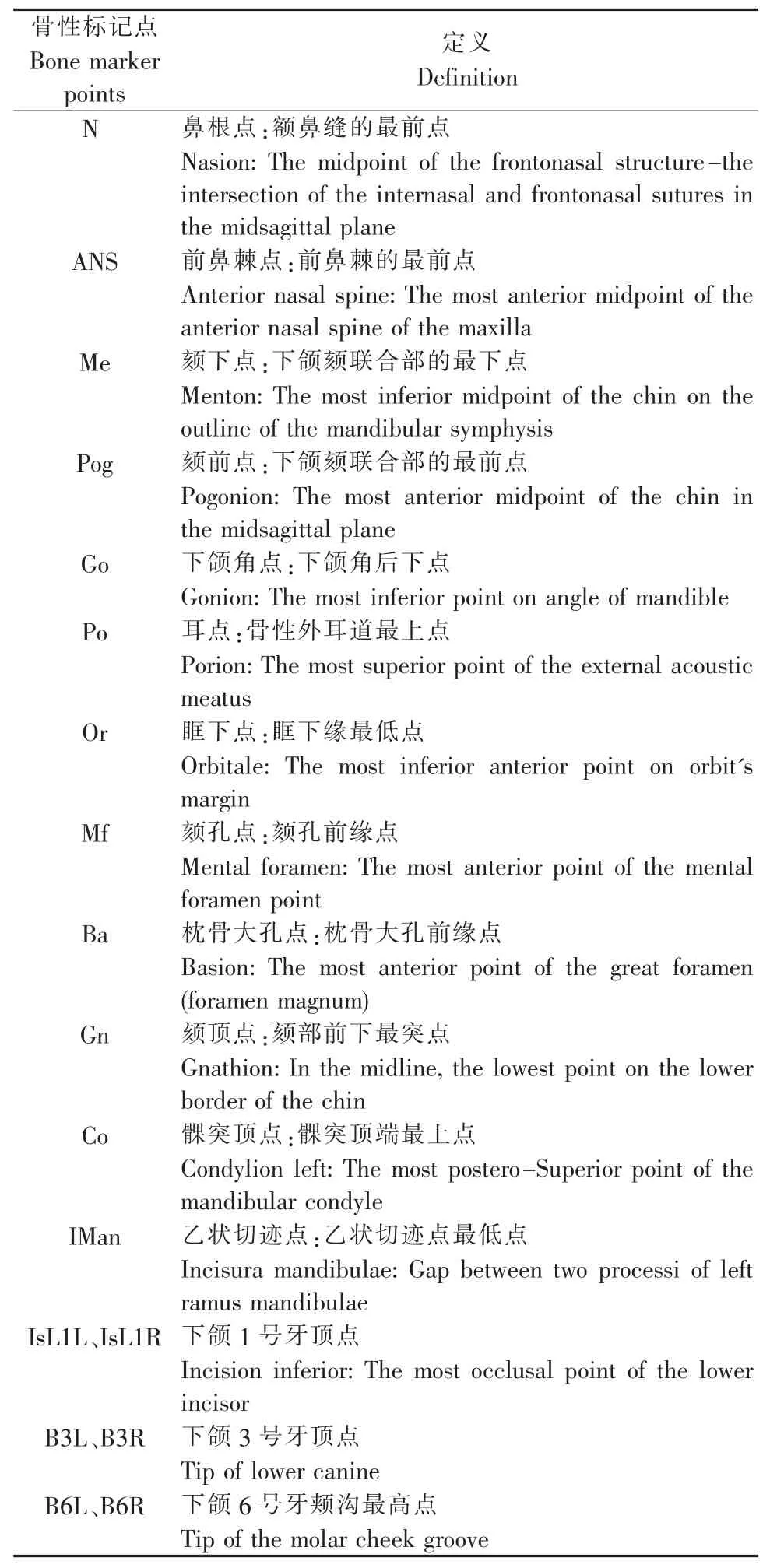
表1 设定骨性标记点Table 1 Setting the bone marker points

表2 设定参考平面Table 2 Setting the reference planes

表3 测量指标Table 3 Measurement metrics
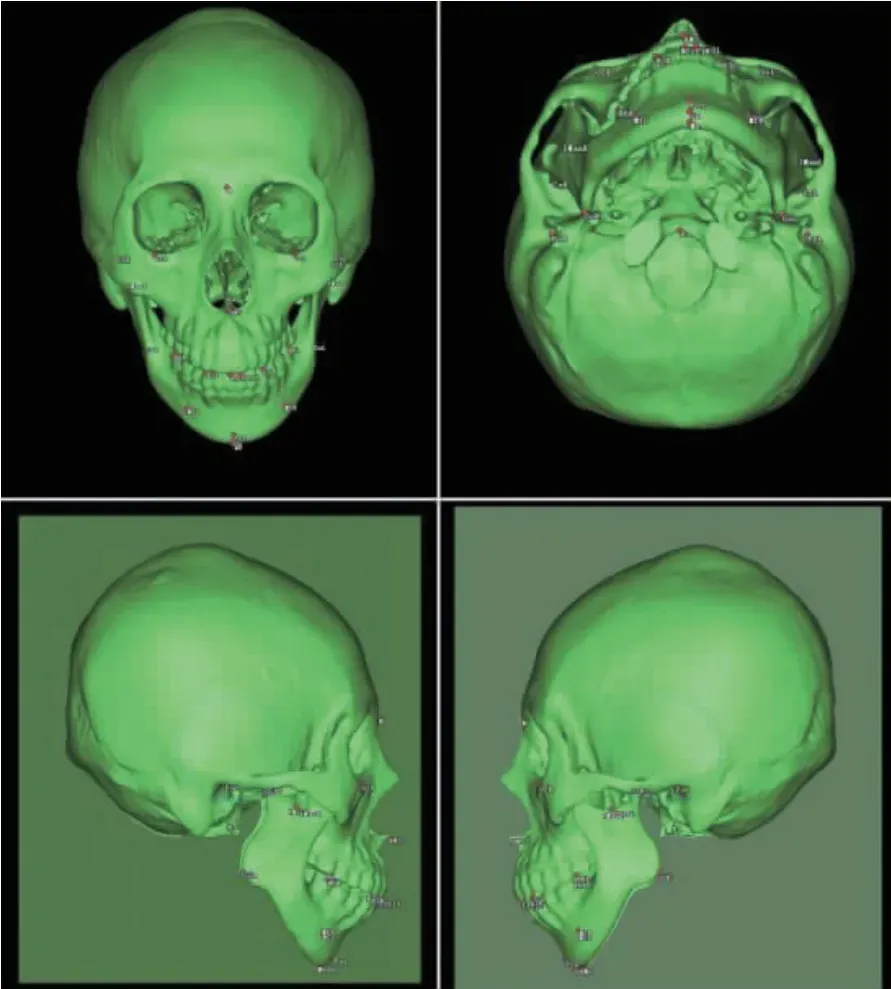
图1 标记用于术前测量的参考点Fig.1 Mark reference points for preoperative measurements
1.3.2 虚拟手术与实际手术
通过软件中的截骨(Osteotomy)功能,按照颏部水平截骨设计截骨平面,设计截骨平面长度、宽度及深度等特性,将分割的颏部骨块进行三维空间的移动。以1 mm 为移动单位,进行三维空间的平移(图2)。达到正常测量值位置后,与患者沟通并观看手术模拟效果,根据患者意愿再次调整骨块位置。与患者沟通谈话签字后,按照模拟手术方案进行实际截骨及颏部骨块的平移,所需实现的移动距离通过术中多次使用刻度尺测量校准。

图2 三维数字化重建模型上实施虚拟截骨手术Fig.2 Virtual bone osteotomy performed on a 3D digital reconstruction model
1.3.3 石膏模型打印与机器人截骨
由于石膏模型与人骨头颅在螺旋CT 机中的显影效果相同,并能准确进行三维重建,故本研究使用3D 打印石膏模型进行机器人手术精确性研究。将患者DICOM 格式的CT 数据转换成STL 格式数据导入3D 模型打印机,为提高打印效率及降低实验成本,我们仅打印出1∶1 大小的下颌骨石膏模型,并按照常规的手术模拟流程进行同一部螺旋CT 机扫描,数据导入ProPlanCMF 软件,与患者本人术前数字化头颅模型重叠配准,标记相同测定点;并与患者术前标记点对比测量,要求所有测量数据完全一致。将患者最终选择的手术模拟方案导入机器人导航系统(图3)。

图3 石膏模型的手术模拟Fig.3 Surgical simulation of plaster models
本研究所使用的为Universal Robots 第5 代机器人原型机改进而成的颅颌面整形手术机器人,具备手术导航系统、超声骨刀(图4A)、钻孔执行器。在颅骨模型上植入与导航系统匹配的红外线追踪器Tracker(图4B),安装Tracker 于机械臂上,使头颅模型与导航中的虚拟头颅模型处于同一个三维空间中(图4C)。截骨前首先在模拟手术中确定骨块固定后的钛板、钛钉的固定位置,截骨前在模型上打好钉孔,术前按照模拟结果提前准备固定所用的已预弯的钛板,要求长度及弯曲角度与模拟一致。按照模拟截骨规划路径,在人机协同下使用机械臂末端超声骨刀进行水平截骨,截下的骨块游离后,使用预制弯曲的钛板固定,术后再次使用螺旋CT 机进行扫描,并将数据导入软件进行测量(图5)。
图4 石膏模型截骨Fig.4 Genioplasty on plaster model
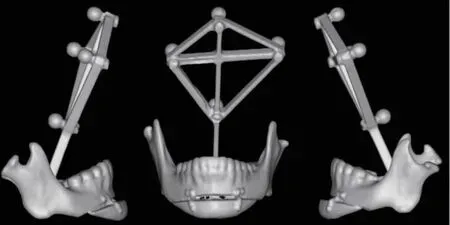
图5 石膏模型截骨术后扫描Fig.5 Scan of the post-operation gypsum model
1.3.4 评价机器人手术精确性
患者术后2~3 周内再次进行头颅CT 扫描,并导入软件进行重新测量。将机器人截骨固定后的石膏模型再次通过CT 扫描进行重新测量。将患者手术后、石膏截骨术后及数字化模拟术后的评价指标进行对比,测量两种手术方式与模拟手术的差异,并评价颅颌面整形手术机器人在颏部水平截骨术中应用的精确性及安全性。为保证测量的可靠性,本研究的数据测量由同一名研究人员于不同时间分别进行3 次测量,取平均值,为保证统计的准确性,由另一研究人员统计测量值[12]。
1.4 统计方法
使用SPSS 18.0 统计学软件进行统计学分析。采用配对t 检验,分别将机器人手术和临床手术的术后测量项目与术前模拟的测量项目比较。P<0.05表示差异具有统计学意义。
2 结果
机器人组的术后测量指标Pog-N、ANS-Me、Gn-Mf、Go-Mf 与对照组模拟指标相比无明显统计学差异(P>0.05),临床组术后测量指标与对照组模拟指标相比,统计学差异明显(P<0.05)。机器人组的手术截骨路线与对照组术前模拟的截骨路线一致(P>0.05),而临床组的手术截骨路线与对照组模拟的截骨路线之间存在差异(P<0.05)。机器人截骨术后的MfL 为0.36±0.05,临床 组手术后 的MfL 为0.09±0.06。临床组与机器人组相比,术后的内固定与颏前点的最小距离更小(表4~6)。
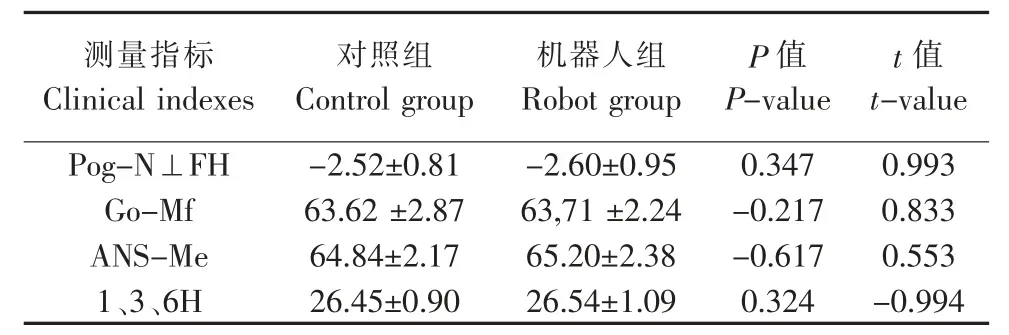
表4 对照组与机器人组临床指标比较Table 4 Comparison of clinical indexes between control group and robot group

表5 对照组与临床组临床指标比较Table 5 Comparison of clinical indexes between control group and clinical group

表6 机器人组与临床组各临床指标比较Table 6 Comparison of clinical indexes between robot group and clinical group
3 讨论
与传统临床手术操作相比,配备了手术导航系统、末端超声骨刀执行器的颅颌面整形手术机器人可以更加精准地进行颏部水平截骨,其结果更加接近术前模拟设计方案,安全性也更高。
在截骨手术中,为了克服人手的局限性,截骨手术导航系统已获得了成功应用。该系统可以帮助术者在术中穿透体表组织的遮挡,直观展现手术部位和实时定位手术器械[13]。但是,在一般的配有导航系统的手术环境中,由于术者在截骨器械行进过程中无法同时兼顾导航模拟图像与术区,即便截骨前精确配准,实际操作时,也可能在握持截骨器械切割过程中出现角度、高度、长度、深度等的偏差,并不能与模拟计划完全相符,导航系统的优点无法得以完全体现。手术机器人的机械臂可以在导航配准患者颏部的截骨路线后,完全按照导航中的术前模拟规划路径进行截骨,并且能克服人手操作时存在的不稳定、颤抖、疲劳等缺点,确保截骨路线与计划完全一致,使手术更加安全、准确。
在导航系统引导的基础上,通过手术机器人操作的截骨路线更加精准,损伤更小。本研究中,机器人在石膏模型上的截骨路线比临床组截骨更加接近手术模拟规划路线。所研发的颅颌面整形手术机器人使用导航配准引导机械臂进行截骨工具的定位,截骨过程中同时追踪截骨器械及颅骨模型,确保截骨路线与模拟设计一致,避免出现因徒手切割的截骨块双侧不对称及截骨平面的偏斜引起游离骨块固定不准确;而且,截骨路线的精准可以减少附着软组织的剥离,保留软组织附着点对于维持颏游离段的血液供应和有效恢复颏部活力至关重要[14]。
通过手术机器人操作的内固定位置更加安全。本研究中,实际手术后的内固定与颏前点的最小距离比手术机器人的术后测量值更小,相应的颏神经损伤风险也更高。常规的术前手术模拟设计仅设计了截骨路径的高度,并没有进一步设计内固定植入的位置。在术中截骨后,临时根据情况决定内固定植入的位置,存在着损伤颏神经的风险。本研究中,机器人手术的内固定与颏前点的平均最小距离大于临床操作的距离,对于颏神经起到了更好的保护作用。本研究中,我们提前根据三维重建模拟选取钉孔的安全位置,并且在截骨前提前钻孔,相较截骨后使用器械把持游离骨块再进行打孔,孔道的位置及角度会更加准确、稳定、安全。本研究结果表明,机器人手术的石膏模型术后的各个测量值及预计螺钉固定位置,与模拟的术后测量值更加接近。在今后的研究中,我们将进一步使用锥形束CT 进行充分的术前临床和放射学评估,以精确定位术区解剖结构[15-16]。
目前,手术机器人在颅颌面外科的应用较少,而无论是轮廓手术、正颌手术还是先天性疾病如颅缝早闭、半面短小等诊疗方面,均有使用颅颌面整形手术机器人的需求[17]。随着技术的进步及相关应用的拓展,不断有新的技术与手术机器人系统整合,不仅能降低传统手术导致的出血、术后感染等风险,还能提高手术的精确度,减少手术时间,使相关的治疗更为精准、安全[18-19]。
猜你喜欢
中国新技术新产品(2022年14期)2022-11-01
中华实用诊断与治疗杂志(2022年1期)2022-08-31
现代仪器与医疗(2022年1期)2022-04-19
保健与生活(2021年7期)2021-04-19
课程教育研究(2021年10期)2021-04-13
西部论丛(2019年17期)2019-10-14
故事作文·高年级(2018年7期)2018-07-19
中国美容医学(2017年9期)2017-10-19
中国现代医生(2014年4期)2014-02-25
中学生英语高效课堂探究(2011年4期)2011-07-07