
国内应用达芬奇手术系统与传统开胸心脏手术临床效果的Meta分析
2022-03-04 04:11黄伟民张玉海
中国体外循环杂志 2022年1期
黄伟民,张玉海,王 亮
近年来,随着人们对生活质量要求不断提高,微创外科技术得到快速发展,微创的观念深入人心。上个世纪90年代初,电视胸腔镜技术被成功应用于心脏外科领域,而后遇到手术视野不足、精度差、易疲劳、操作难度大等问题,随之引入了“达芬奇”(Da Vinci)机器人手术系统。自从第一例机器人心脏手术被实施以来,已经有二十多年[1]。近年来,对微创心脏外科技术的需求不断增加。国外研究正向复杂性心脏病迈进[2],但国内研究发展较晚,鲜有文献对其效果行系统性评价。
1 资料与方法
1.1文献研究类型 纳入标准是国内研究者正式发表的有关机器人与传统正中开胸比较的研究。排除存在混杂因素的试验,排除没有设立对照组的病例研究。
1.2研究对象 外科手术治疗的心脏病患者,两组之间的差异仅为是否使用达芬奇机器人手术系统技术,文献资料须提供明确的病例数、性别等相关定性及定量分析资料,排除存在相关手术禁忌证的患者。
1.3干预措施 机器人组(RS组):采用达芬奇机器人手术系统手术方式治疗心脏疾病;传统开胸组(MS组):采用正中劈开胸骨手术方式治疗心脏疾病,两组其他基础治疗应该一致。
1.4收集指标 体外循环时间、升主动脉阻断时间、手术时间、ICU停留时间、术后住院时间、呼吸机辅助时间、胸腔闭式引流量、并发症、术中输血、切口满意、生理评分、心理评分(纳入文献至少包含有上述5种指标)。其中“术后并发症”的定义:肺部感染、肾衰竭、切口愈合不良、术后新发房颤、脑卒中、中转开胸、二次开胸探查、围手术期死亡。
1.5检索策略 计算机检索中国期刊全文数据库、维普数据库、万方数据库,搜集有关机器人与传统开胸下心脏手术对比分析研究。
1.6资料提取与方法学质量评价 由两名研究人员独立检索,按纳入与排除标准筛查文献,发生分歧时可以讨论解决,必要时征求其他研究员的意见。对随机对照试验的方法学质量评价参照Cochrane协作网系统评价员手册执行。
1.7统计分析 使用Cochrane协作网提供的Rev-Man 5.4软件进行统计学分析。计数资料采用计算比值比(OR)及95%置信区间(CI)为统计分析量,计量资料采用平均差(MD)及95%CI为统计分析量。在合并分析前,采用I2检验进行不同研究间的异质性检验,若各研究间比较无统计学异质性(P≥0.10或I2<50%),采用固定效应模型进行Meta分析,若异质性显著(P≤0.10或I2>50%),采用随机效应模型进行分析。当异质性过大时,则采用描述性分析。
2 结 果
2.1检索结果 根据检索策略,检索到文献359篇,通过阅读标题和摘要初步筛选出文献359篇,排除个案、临床报道、综述、会议及重复发表文献等后获得文献28篇,精读全文,排除主要指标数据不全、质量评价不符合等要求,最终纳入文献7篇。
2.2纳入研究的质量评价 对纳入的7篇队列研究[3-9](共8个研究,1 103例患者,文献[5]里有两种手术类型),文献基本特征见表1。

表1 文献基本特征
质量评价为:有严格的纳入标准和排除标准,分析方法均使用t和χ2检验,文献质量评价见表2。

表2 文献质量评价
2.3评价分析
2.3.1体外循环时间 6项研究共纳入781名患者,显示体外循环时间RS组明显长于MS组(MD=34.32,95%CI:21.64~46.99,P<0.00001)。见图1。

图1 体外循环时间比较
2.3.2升主动脉阻断时间 4项研究共纳入436名患者,结果显示升主动脉阻断时间两组比较无统计学意义(MD=14.97,95%CI:-6.01~35.96,P=0.16)。见图2。
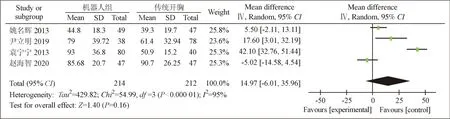
图2 升主动脉阻断时间比较
2.3.3手术时间 4项研究共纳入676名患者,结果显示手术时间两组比较无统计学意义(MD=4.36,95%CI:-75.92~84.64,P=0.92)。见图3。

图3 手术时间比较
2.3.4ICU停留时间 仅3项研究共纳入412名患者,结果显示两组患者的ICU停留时间RS组明显短于MS组(MD=-27.97,95%CI:-43.17~-12.77,P=0.0003)。见图4。

图4 ICU停留时间比较
2.3.5术后住院时间 4项研究共纳入469名患者,结果显示术后住院时间RS组明显短于MS组(MD=-2.56,95%CI:-4.31~-0.80,P=0.004)。见图5。

图5 术后住院时间比较
2.3.6呼吸机辅助时间 3项研究共纳入392名患者,结果显示呼吸机辅助时间RS组明显短于MS组(MD=-4.20,95%CI:-7.33~-1.08,P=0.008)。见图6。

图6 呼吸机辅助时间比较
2.3.7胸腔闭式引流量 4项研究共纳入508名患者,结果显示胸腔闭式引流量RS组明显少于MS组(MD=-214.69,95%CI:-260.86~-168.53,P<0.00001)。见图7。

图7 胸腔闭式引流量
2.3.8手术并发症 7项研究共纳入983名患者,结果显示手术并发症RS组明显少于MS组(MD=0.32,95%CI:0.18,0.54,P<0.0001)。见图8。

图8 手术并发症的比较
3 讨 论
3.1达芬奇机器人手术系统的优越性及局限性
机器人心脏外科手术,在不开胸的情况下,该技术呈现的三维手术视野可按比例完全再现人体组织内部结构,其微创器械的直径为8 mm,通过钥匙孔大小的切口进入人体组织内,可以完成人手不可能完成的高难度动作。
虽然该技术临床效果优越,但也有一定局限,如目前术者均存在比较长的学习曲线,导致体外循环
时间延长,从而损坏凝血机制导致术后止血困难。尹立明等[8]人研究表明RS组虽然手术时间、体外循环时间以及转机时间延长,但并没有增加患者术后死亡率及并发症。另外,机器人体外循环手术麻醉中需要单肺通气,其低氧血症的发生率高于传统开胸,虽然低氧血症发生的原因复杂,但肖赛松[10]等人通过对130例患者进行严格的术前评估和及时的处理,其研究报道尚不致发生相关并发症。
3.2本研究的优点与缺点 研究纳入了几乎所有心脏外科常见手术方式,包括冠状动脉旁路移植术、二尖瓣成形、肿瘤切除、房间隔缺损和室间隔缺损修补,且通过meta分析得出,在某些指标方面(ICU停留时间、术后住院时间、呼吸机辅助时间、胸腔引流量及并发症),围手术期临床疗效达芬奇系统明显高于传统正中开胸。对于出院后的患者,刘国鹏等[11]人研究表明,机器人术式患者术后生活质量更高,并能较快的恢复正常生活。这些结果与Doulamis[12]的研究报道相符,即无论手术类型如何,在心脏手术术后并发症发和生率方面机器人技术比传统开放手术更低。
需要注意的是,除外手术并发症,其余指标异质性显著(I2>50%),笔者认为异质性可能来源于年龄、不同纳入标准、手术方式等,应该进一步确定异质性来源,但因其国内此类文献少,纳入研究少,无法行亚组分析。另外,本研究缺乏花费成本的比较,国外已有Hemli[13]研究指出机器人手术成本的增加会被并发症的减少、住院时间的缩短和术后恢复的加快所抵消。
综上,达芬奇手术系统较传统开胸在心脏外科具有一定优势;为了缩小与国外的技术差距,国内需要更多心脏外科机器人手术系统的临床应用与研究报道。
猜你喜欢
中国现代医生(2022年21期)2022-08-22
健康体检与管理(2022年4期)2022-05-13
中国药学药品知识仓库(2022年7期)2022-05-10
医学食疗与健康(2022年3期)2022-04-23
工业设计(2019年6期)2019-07-08
环球时报(2019-05-06)2019-05-06
中外医疗(2019年31期)2019-01-13
作文周刊·小学二年级版(2017年6期)2017-07-12
云南中医中药杂志(2017年2期)2017-03-09
现代养生·下半月(2016年5期)2017-01-09
