基于智能材料的深海执行器及海洋仿生机器人研究综述
2022-03-03 05:53:58潘彬彬崔维成胡胜兵韩挚阳
船舶力学 2022年2期
郭 健,潘彬彬,崔维成,3,胡胜兵,韩挚阳
(1.上海海洋大学海洋科学学院,上海 201306;2.上海海洋大学深渊科学技术研究中心(上海深渊科学工程技术研究中心),上海 201306;3.西湖大学工学院,杭州 310024)
0 引 言
21 世纪是海洋的时代,同时海洋装备呈现高质量发展趋势。海洋中90%的水深超过1000 m,但遗憾的是,人类对水深在1000 m 以上的海洋知之甚少。深海是海洋中充满神秘和未知的区域,是全球油气、矿物以及生物资源的最主要集结区[1],是“智慧海洋”的核心区。近年来,随着人工智能、巨量数据集合、网络云等新兴技术在海洋领域的应用,智慧海洋成为了实施海洋强国战略的又一角逐“高地”[2]。智慧海洋工程走向深海,在现代化的海洋装备和海洋活动中深度融合先进的信息技术和智能技术,不断推进深海海域的透明化,这对了解海洋、认识海洋和服务海洋具有重要意义。
智能材料是20世纪90年代受生物启发或模仿生物特性而开发出的一类集感知、驱动及控制为一体的类似生物智能特征的新型功能材料,是21世纪最具发展潜力的涉及多学科的前沿交叉研究领域之一,在航天、国防、海工、机电、生物医学与工程等领域具有极大的应用潜力[3-4]。在海洋智能化时代,发展小型智能化水下无人设备是实现未来海洋观测的重要机遇和挑战[5]。面对人类不可预知的极端深海环境,开发和应用可以挑战各种复杂海底环境的智能水下机器人将至关重要。由于受传统的水下机器人响应速度、驱动方式和体积等因素的限制,导致其机动性、可控制性及环境适应性受到极大的制约。“物竞天择”的自然生存法则使海洋生物的身体结构和运动模式得到了最优化的选择,将智能驱动材料深度融合到海洋仿生机器人的研制中是当前水下机器人领域的技术前沿之一[6-7]。
本文综述了基于智能材料的深海执行器和海洋仿生机器人的国内外发展概况,分析比较了它们的驱动机理、结构设计特点以及优劣势等,并对未来在海洋领域应用的主要技术挑战和发展趋势作出了展望。
1 智能驱动材料
智能材料是一类可以对外界差异刺激做出不同反应和处理的新型智能化功能材料系统。智能驱动材料兼具感知、执行和信息控制等功能,可以实现“无机械关节的原位驱动”模式,是一种发展潜力极大的独特驱动方式[6]。常见的智能驱动材料主要包含形状记忆合金/聚合物(shape memory alloy/polymer,SMA/SMP)、压电陶瓷(piezoelectric transducer,PZT)、电活性聚合物(electroactive polymers,EAP)等[8],其中典型的电活性聚合物又可细分为离子聚合物金属复合材料(ionic polymer-metal composites,IPMC)和介电弹性体(dielectric elastomer,DE)[9]。
智能材料的驱动特点和性能会因各材料的驱动机理不同而有所区别。SMA用于水下驱动系统主要是利用形状记忆效应(SME)的性质,且以单程记忆效应为主。目前,Ni-Ti 系SMA 的实践应用最为普遍[10],其最大收缩应变可达8%,具有优异的超弹性、形状记忆效应、生物相容性、高阻尼性以及耐磨性等[11];PZT 具有高输出能力、高功率密度以及尺寸紧凑等优点,在传感器和制动器领域被广泛应用[12];IPMC具有体积小、重量轻、响应快的优势,但输出功率较小[13];DE具有弹性模量低、变形大、工作温度宽、机电耦合效率高以及频率范围广等独特的优点[14],但驱动电压较高,在海水环境中的绝缘传输存在较大的困难,且面临超限击穿失效的风险,常见智能材料的性能参数如表1所示。
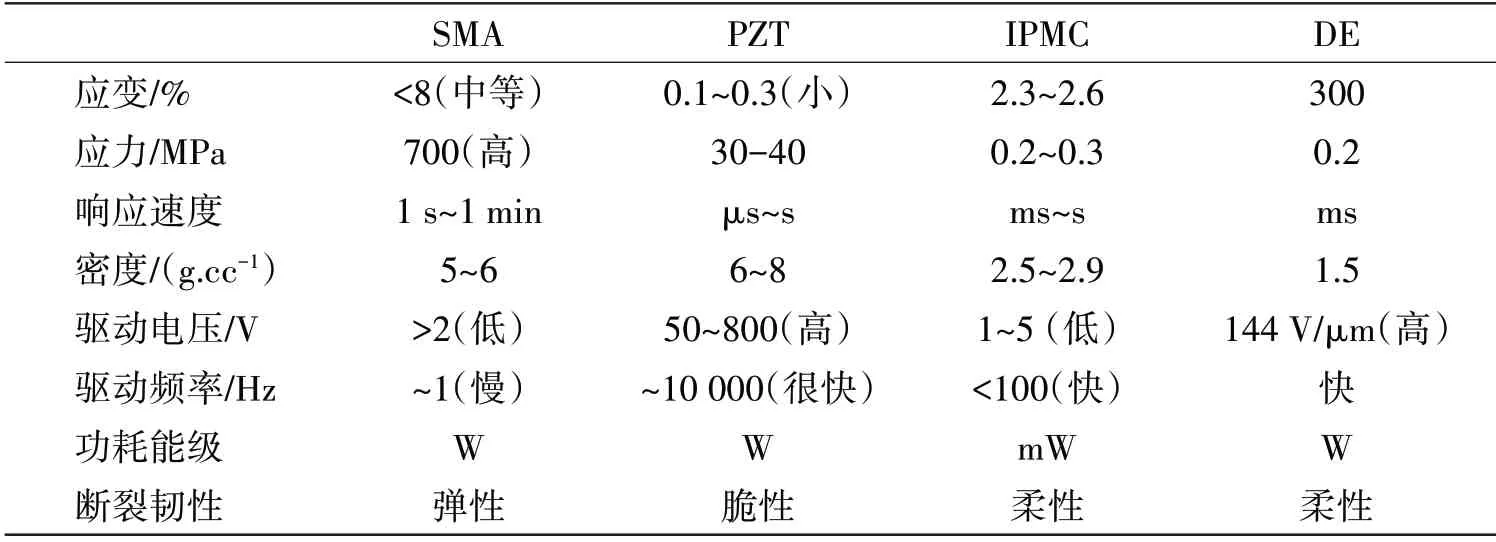
表1 典型智能驱动材料的性能参数[6]Tab.1 Performance parameters of typical smart drive materials[6]
2 深海执行器
随着深海探索的发展,越来越多的海洋装备被投放在深海区域,其搭载的很多传感器和采样设备都需要深海执行器将电能转化为机械能,并完成触发或执行指定动作,而传统的执行器存在固有缺陷,迫切需要新型执行器来代替。
2.1 传统深海执行器
经过多年的发展,深海探索的装备主要有载人潜水器、无人潜水器、深海着陆器、水下滑翔机、剖面浮标和深拖等[15-16],如图1 所示。这些传统深海装备一般以电磁体、电机或液压等[17]作为驱动执行器,存在造价高、系统复杂、重量重、体积大、长周期布放可靠性低、噪声和电磁干扰及生物兼容性差等固有的局限性。

图1 传统海洋探索装备[15-16]Fig.1 Traditional ocean exploration equipment[15-16]
2.2 智能驱动器
为了突破传统深海执行器的缺陷,人类开始向自然学习,将可以感知外部刺激的智能材料引入海洋领域。智能材料的应力-应变性能优异,耐压和密封系统结构简单,重量和体积超小,自身可以完成电能到机械能的输出。目前,智能驱动器主要有SMA 驱动器、EAP 驱动器和PZT 驱动器等,且大部分处于淡水试验阶段,在深海极端环境下的性能参数尚不明确。
2.2.1 SMA驱动器
多数SMA 驱动器由软体介质基底和驱动元件组成,其结构的变形和驱动力通常是单根或多根SMA 丝的组合致动[9]。SMA 驱动器的变形能力较为突出,但存在散热慢和效率低的问题。针对这些局限性,Wang等[18]提出了一种以易熔合金管来提高软体材料刚性的耦合新型驱动器,如图2(a)所示。She 等[19]利用宽窄片的物理结构优势研制了一种片状的SMA 驱动器,成功规避了材料散热慢的问题,从而有效提高了工作效率,如图2(b)所示。Hugo 等[20]将SMA 丝倾斜分列在硅胶薄片表面,通过加热圆柱形的卷缩硅胶片可产生最大30°的扭转变形,实现了SMA驱动器的扭转运动,如图2(c)所示。
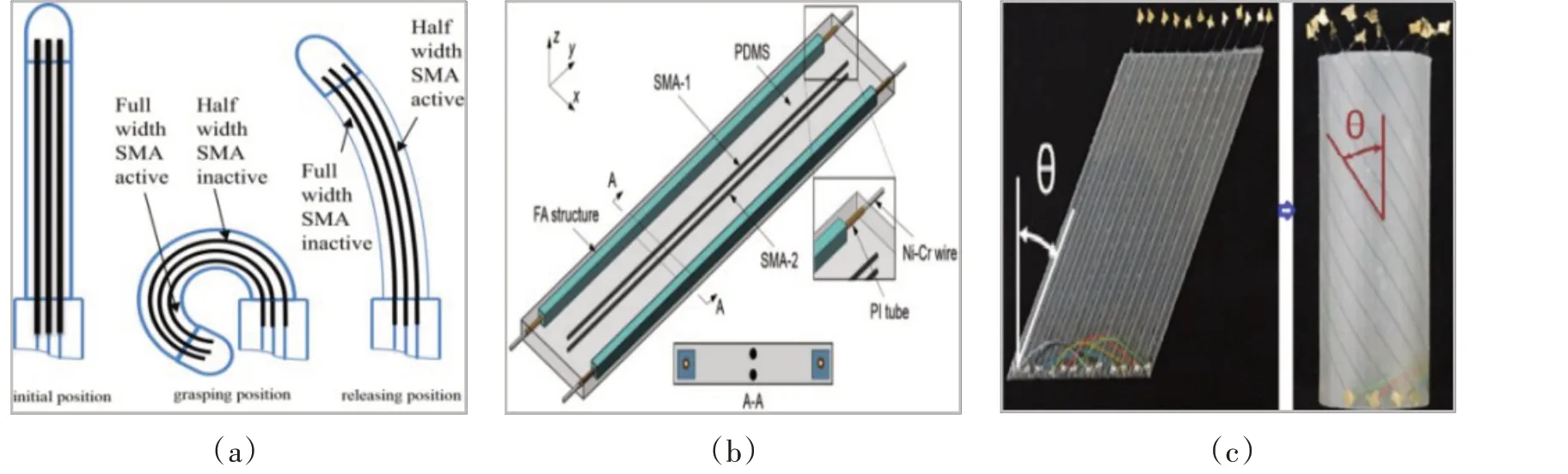
图2 SMA驱动器[18-20]Fig.2 SMA actuator[18-20]
2.2.2 EAP驱动器
EAP驱动器主要包括IPMC 和DE两种。IPMC 驱动器的驱动电压低、频率快、能耗少,但游速和驱动力较小。Guo 等[21]将柔性聚合物(PEDOT)移植到IPMC 电极表面,改善驱动器的机电性能并有效减少水分流失,使其稳定工作时间延长至1000 s 以上,如图3(a)所示。DE 驱动器响应快、无噪点干扰,但驱动电压较高,技术难度相对较大。Liu 等[22]提出一种内置蜂窝元结构的单向软介电弹性体执行器,其蜂窝元将驱动器的面扩展转换为定向变形,额定应变达到15.8%,如图3(b)所示。Giacomo 等[23]设计了一种基于苯乙烯基合成橡胶(SR)的介电弹性体执行器,利用橡胶的双轴预拉伸来实现DE膜的刚度补偿,从而使执行器侧面行程提升了18%以上,如图3(c)所示。
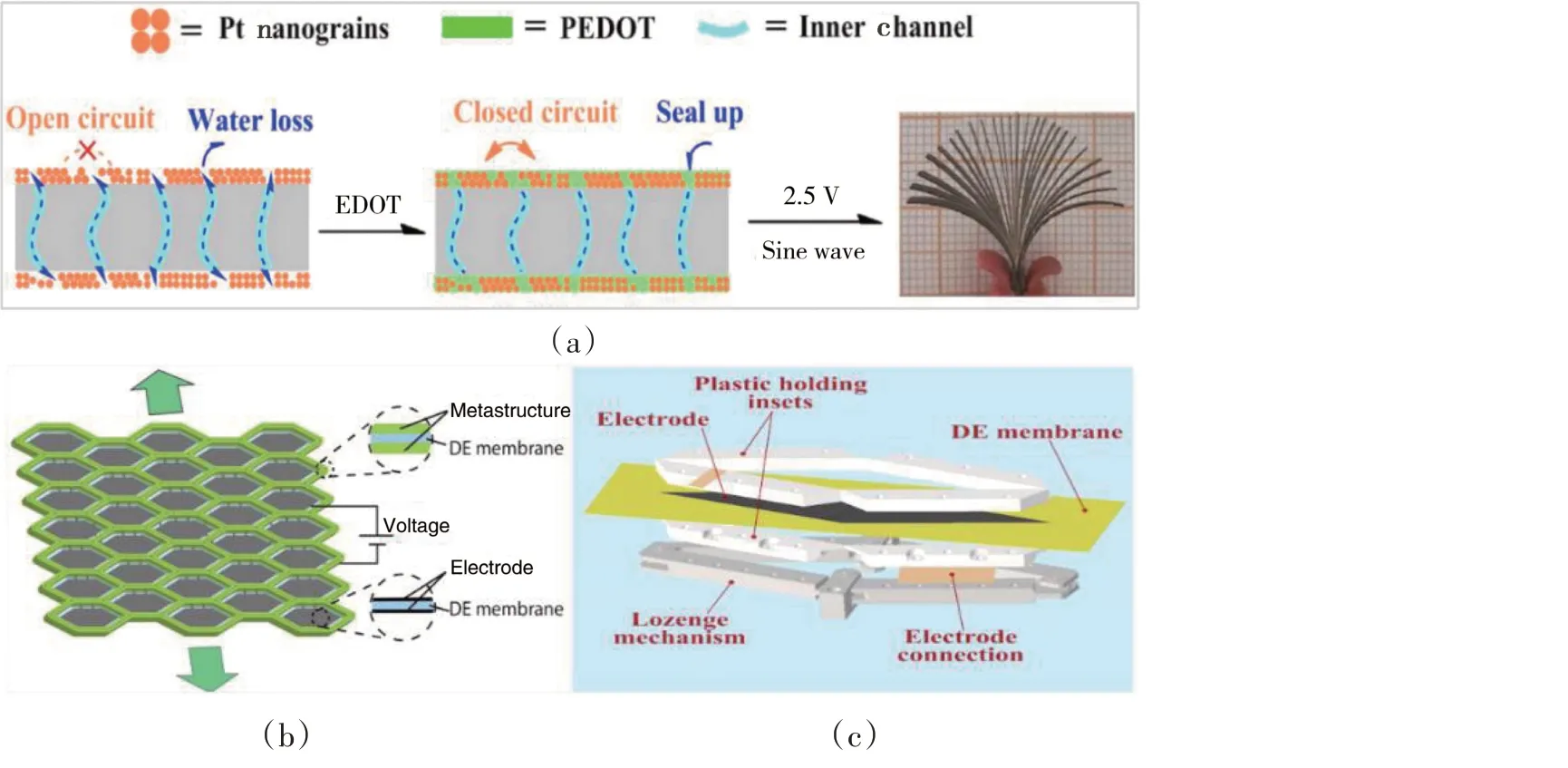
图3 EAP驱动器[21-23]Fig.3 EAP actuator[21-23]
2.2.3 PZT驱动器
PZT 驱动器在水下可执行伸缩双向动作,类似双程记忆效应SMA 的功能,伸缩应力在100 MPa 量级,且动作频率较高,电能转为机械能的效率高达90%左右,但变形量仅有0.2%左右,作为驱动器时需要传输机构来放大,一定程度上增大了装备的体积,同时驱动PZT 需要较高的电压(50~800 V),这就带来密封困难和效率降低等问题。因此,目前PZT驱动器仅在压电电机领域应用[24-25](见图4),而在深海领域未有实际探索尝试。
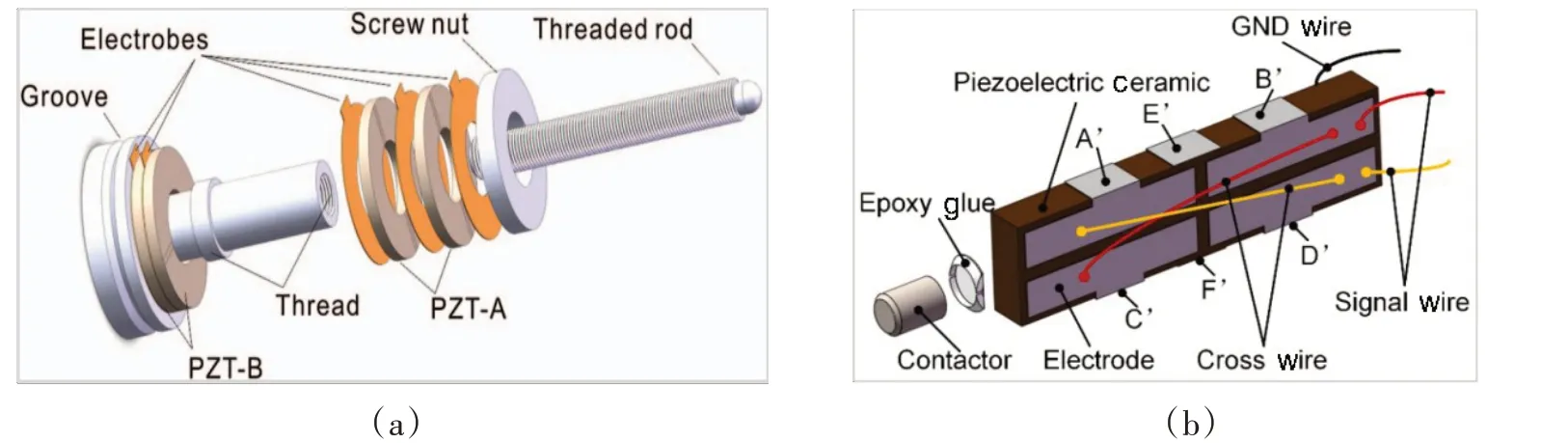
图4 PZT驱动器[24-25]Fig.4 PZT actuator[24-25]
2.3 典型深海执行器的对比
SMA驱动器造价低、结构简单、耐腐蚀、应力和应变都较大,具备很多深海执行器需要的输出力和输出行程要求。DE 驱动器的高驱动电压在海水环境中的绝缘传输存在较大的困难。IPMC 驱动器提供的驱动力较小,在海水等离子溶液中存在较严重的漏电现象,导致其动作幅度和效率极大降低。综合使用环境、输出力、行程、结构、重量以及体积等因素,SMA 驱动器是现阶段最接近海洋工程实用化的智能材料。不同执行器的性能参数见表2。
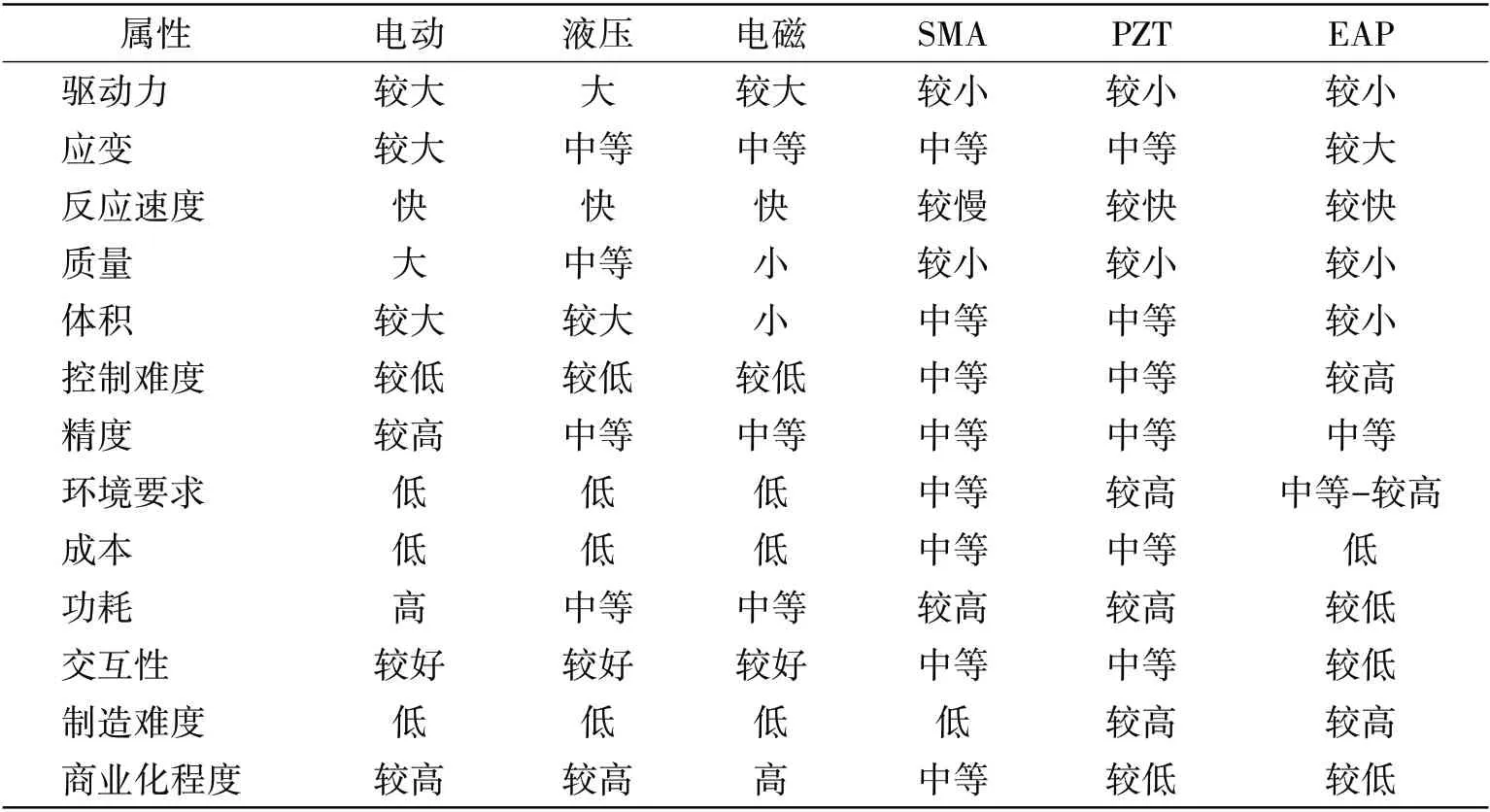
表2 典型深海执行器的性能参数Tab.2 Performance parameters of typical deep-sea actuators
3 海洋仿生机器人
综合智能材料和海洋生物的推进方式而设计出的海洋仿生机器人能够较好地完成指定动作,从而使人类在不破坏海洋生态系统的前提下更好地了解海洋、运用海洋。
3.1 海洋生物推进模式
海洋生物的推进模式是生活环境、习性、运动能力长期综合优化的结果。科学家将海洋生物的推进方式分为:摆动、划动、螺旋以及喷射推进。摆动模式是海洋鱼类最普遍的游动方式[26],也是目前研究最多的推进方式,具体如图5(a)所示;划动推进是近底海洋端足类生物的常用运动方式,如图5(b)所示;喷射推进在乌贼、鱿鱼、水母等具有特殊构造的海洋生物中较为常见,是仿生推进系统的重点模仿模式。
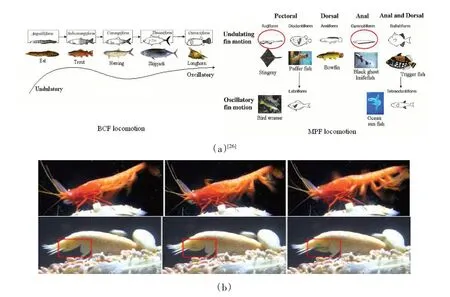
图5 海洋生物推进方式Fig.5 Swimming modes of marine life
3.2 智能海洋仿生机器人
综合现有仿生结构、智能驱动材料以及先进的控制方式,发展功能趋近海洋生物的机器人是当前水下机器人领域的技术前沿之一。目前,海洋仿生对象主要有海龟、水母、乌贼、蝠鲼和牛鼻魟鱼等。
3.2.1 SMA仿生机器人
日本香川大学Shi 等[27]模仿水母的运动,提出了基于SMA 驱动的新型仿生水下机器人,如图6(a)所示;之后,Sumoto等[28]为了突破小型机器鱼的有效载荷小和无法携带传感器的局限性,通过分段二进制控制法(SBC)开发了SMA驱动的大型鱼型机器人,游速达到了7 cm/s,如图6(b)所示;美国弗吉尼亚理工学院的Villanueva 等[29]模仿海月水母的推进机制和外观,研制了一种基于仿生形状记忆合金复合材料(BISMAC)驱动的仿生水母机器人Robojelly,其直径为164 mm,最高速度为54.2 mm/s,如图6(c)所示;韩国首尔国立大学的Song 等[30]开发了以智能软复合材料结构(SSC)为执行器的仿生海龟,通过SMA 和编织物的复合实现了海龟在多步态下的柔和动作,游速最大可达22.5 mm/s,如图6(d)所示。
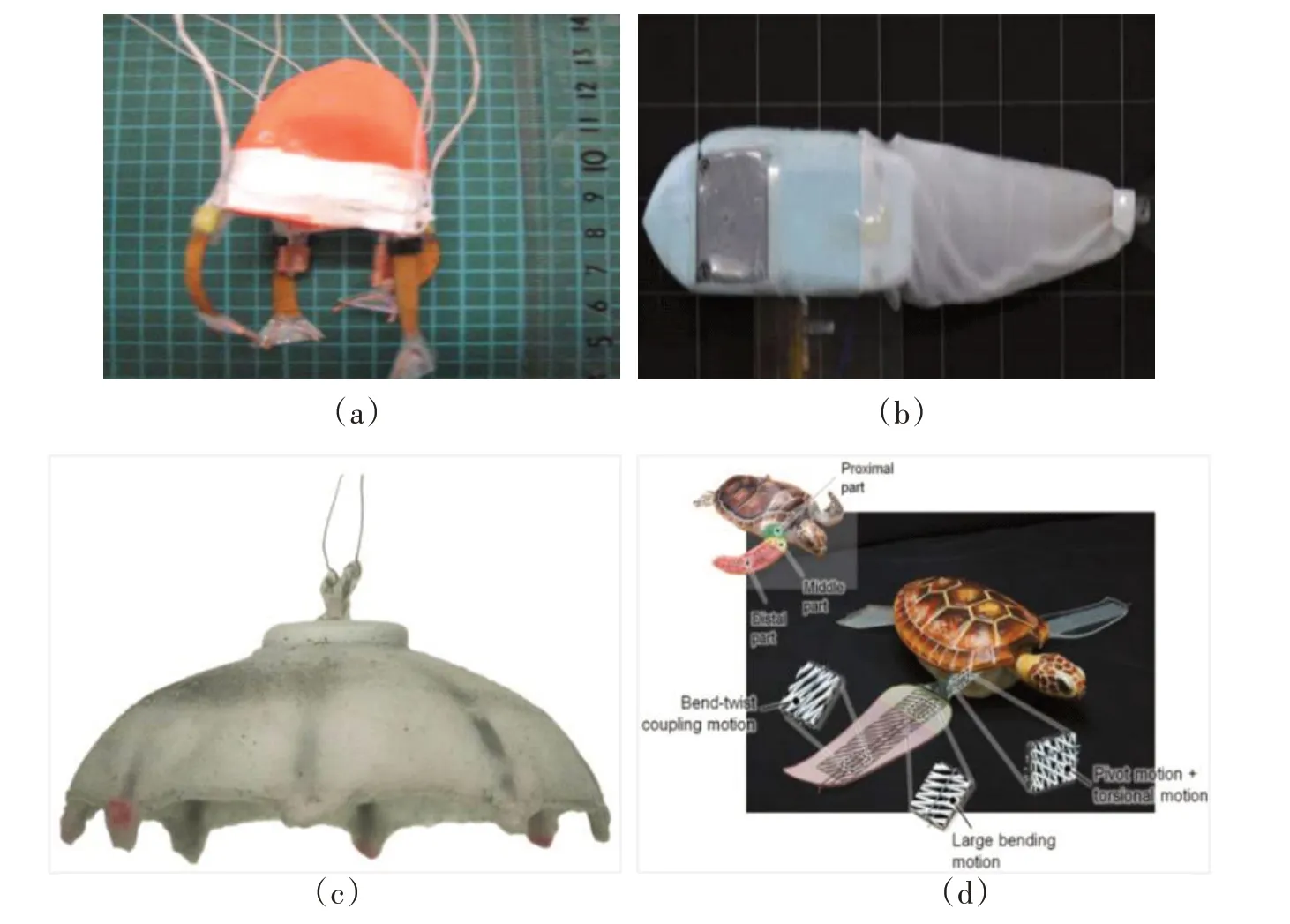
图6 SMA仿生机器人(I)[27-30]Fig.6 Biomimetic robot(I)actuated by SMA[27-30]
哈尔滨工业大学Wang 等[31]研制了一种以SMA 丝驱动的无线仿生蝠鲼机器人,长243 mm,质量354 g,最高游速为57 mm/s,如图7(a)所示;高飞等[32]结合乌贼喷射推进的运动方式,将SMA 丝和硅胶组合作为仿生外套膜,设计了一种推进速度更快(87.7 mm/s)、运动性能更佳的仿生机器人,如图7(b)所示;中国科学技术大学Zhou等[33]通过软智能模块化结构(SMS)实现了水母的三维运动模式,其以最大111 mm/s的直线巡游速度超过了海洋水母的速度,如图7(c)所示;哈尔滨工程大学林希元[34]研制了一款SMA 弹簧驱动的仿生水母,通过搭建非线性控制系统,得到了水母运动速度、排水情况与SMA 加热电流的关系,如图7(d)所示。
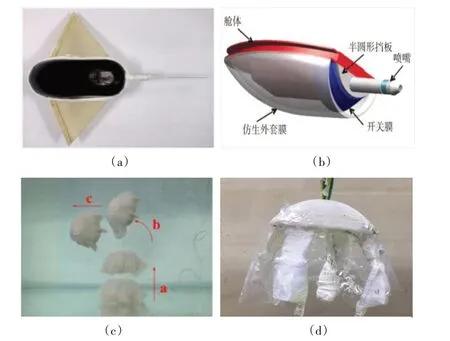
图7 SMA仿生机器人(II)[31-34]Fig.7 Biomimetic robot(II)actuated by SMA[31-34]
3.2.2 IPMC仿生机器人
美国弗吉尼亚大学Chen 等[35]以IPMC 为驱动材料研制了长80 mm,质量为55.3 g 的仿生蝠鲼机器鱼,其在3.3 V电压、0.4 Hz频率下,最大速度达到4.2 mm/s,如图8(a)所示;之后,他们又以牛鼻魟鱼为仿生对象,研制了基于IPMC 驱动的仿生机器鱼,其体长210 mm,重119 g,可自主游动,游动速度为7 mm/s[36],如图8(b)所示;美国弗吉尼亚理工大学Najem等[37]基于维多利亚水母的钟形运动学机理,设计了一种以多个IPMC 执行器驱动的软体透明水母机器人,其直径为164 mm,重量为11 g,最大速度为1.5 mm/s,如图8(c)所示;Hubbard等[38]在软体机器鱼的鱼鳍和鱼尾上融合了IPMC材料,从而使最大游速达到了28 mm/s,如图8(d)所示。
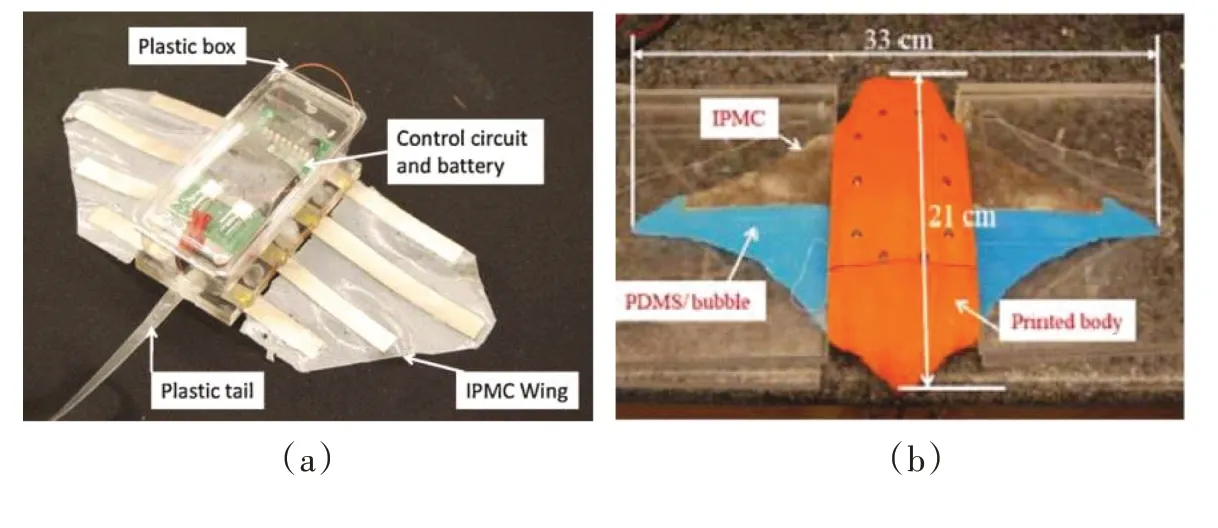
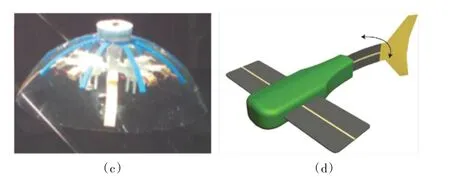
图8 IPMC仿生机器人[35-38]Fig.8 Biomimetic robot actuated by IPMC[35-38]
3.2.3 DE仿生机器人
哈佛大学Berlinger 等[39]将多层DE 叠加形成的模块化鳍状致动器应用于微型水下自主航行器(AUV)中,使输出力和效率得到了极大的提升,最大游速达到了55 mm/s,如图9(a)所示。瑞士洛桑联邦理工学院Shintake等[40]研制了基于DE驱动的仿生机器鱼和仿生水母,解决了DE在导电液体中可靠运行的问题,但实测游速均较小,如图9(b)所示。之后,又改进设计了长150 mm,厚0.75 mm,重4.4 g,最高游速可达37.2 mm/s 的超薄软体机器鱼[41],同时证明基于DE 驱动的摆动推进方式具有很高的潜力,如图9(c)所示。
图9 DE仿生机器人(I)[39-41]Fig.9 Biomimetic robot(I)actuated by DE[39-41]
浙江大学Li等[42]以蝠鲼为仿生原型,将DE作为驱动材料,以透明硅胶作为柔性结构体,研制了可快速运动且方向可控的隐蔽性柔性电子鱼,其长93 mm,在9.5 kV、5 Hz的条件下可达到64 mm/s 的游动速度,如图10(a)所示。浙江大学李国瑞[43]以硅胶胸鳍和DE驱动模块为动力系统,研制了一种耐极端静水压力的深海软体机器鱼,其长205 mm,重138.6 g,实现了在110 MPa静水压力下的自主游动,如图10(b)所示;之后,又开发了一款电驱动仿生水母机器人[43],其在9 kV、1.6 Hz 时最大游速达到了10 mm/s,最大推力为0.12 mN,如图10(c)所示。
图10 DE仿生机器人(II)[42-43]Fig.10 Biomimetic robot(II)actuated by DE[42-43]
3.2.4 PZT仿生机器人
美国加州大学伯克利分校Deng 等[44]模仿箱鲀科鱼类,试制了一种总长为12 mm 的微型水下航行器,具体见图11(a)。韩国Heo等[45]研制了一种以PZT 驱动的仿生机器鱼,其长为270 mm,在0.9 Hz频率下的最大推力为0.0071 N,最大游速为25.19 mm/s,如图11(b)所示。之后,Nguyen 等[46]用4 个PZT薄膜作为驱动元件,设计了一款仿生机器鱼,如图11(c)所示。该机器鱼长400 mm,在1.4 Hz 频率下的最大推力为0.0048 N,最大游速为32 mm/s。
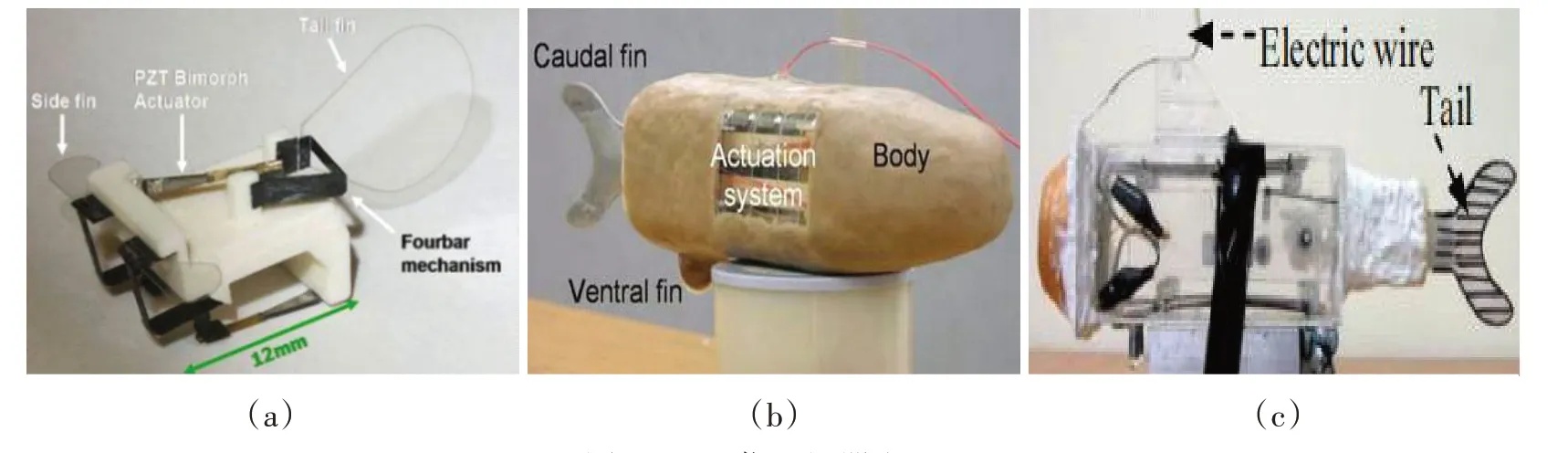
图11 PZT仿生机器人[44-46]Fig.11 Biomimetic robot actuated by PZT[44-46]
4 深海技术挑战及展望
4.1 深海技术挑战
智能材料驱动的深海装备及海洋仿生机器人的研究是为了最终在海洋中投放使用甚至组成集群执行任务,但目前的淡水试验阶段,并未考虑深海实际使用环境。因此,在耐压、低温、驱动力和环境适应性等关键技术方面仍需开展深入研究。
(1)深海高压环境
全海深极端环境下的最大压力可达到110 MPa,智能驱动器在静水压力和执行载荷作用下的应力-应变变化情况需要构建三维本构模型,一维模型已不符合实际外部环境要素。现阶段的实验室仿生驱动结构大都以硅胶包覆,不具备耐压能力,其在深海压力环境下会存在结构损坏和漏水等问题。
(2)深海低温环境
智能材料的热力学性能与环境温度密切相关,而深海海底的温度与常温最大相差10 倍,现阶段的仿生机器人仅基本研究智能材料在室温环境(约24 ℃)下的热力学性能,而在深海低温环境下的热力学性能还属未知。
(3)海水导电性
智能材料的最大优势就是集执行和传感于一身,通过自身的电阻变化可知驱动器的执行情况,但海水是导电的离子溶液,且不同海区在不同季节的电导率不同,这将导致采用材料电阻来进行闭环控制的方法会存在偏差。此外,海水导电性也将使智能材料和连接线路产生漏电,这必然引起驱动器电能转换为机械能的效率损失。
(4)海浪
目前的智能仿生机器人结构大都以硅胶作为包覆主体,且驱动器和主体结构基本采用粘胶固定,在实际海洋环境中的布放会因海浪的冲击而发生破坏或失效。因此,针对多变的海洋环境和实际海洋工程应用,需要对智能仿生机器人的整体结构进行强度设计。
4.2 未来发展趋势
(1)海洋仿生学的微观认知
随着多学科、多领域的技术融合交叉,传统仿生学的宏观认知已经无法适应多变的技术要求,海洋仿生学将实现从宏观到微观的多层次跨域、不断深入细化,从而为实际工程应用提供理论支撑。
(2)海洋复杂环境的高度适应性
复杂多变的海洋环境对海洋仿生机器人的实际工程应用是一个巨大的挑战,未来对于仿生机器人的结构、材料轻便度以及抗腐蚀性等都将提出更高的要求,同时还应兼具小型轻便的发展趋势。
(3)全柔一体化仿生结构
目前的海洋仿生机器人并未对海洋生物的生物学原型进行完全模仿,其主体结构还是以刚性结构为主,仅有驱动部分属于柔性结构,这就使大部分仿生机器人只能单维度运动。未来可将柔性结构和仿生驱动构件结合,发展全柔一体化仿生结构,不仅可以避免粘胶固定的弊端,而且可以实现多个自由度的连续柔性动作。
(4)智能化精准控制
传统的控制方法基本还是以人为主导,对于外界的环境变化无法做出合理判断和更正。未来的海洋仿生机器人将会融合人工智能和机器学习技术,更加注重无人自主化,通过模仿生物神经系统对自身的精准控制,实现多感知信息融合和协同控制的环境感知能力。
(5)负载应用能力
目前的海洋仿生机器人基本处于运动仿生阶段,不具备实际工程化应用的负载能力。未来针对实际的海洋环境勘测和调查需要,仿生机器人必须具备运动自维持和携带部分传感器的能力,从而完成其既定任务目标。
(6)高效的生物能转换应用
随着海洋仿生机器人工程化应用的深入,单一的电能转化为机械能必然无法满足应用的长周期能源供给。未来将综合物理、化学以及生物学等多个学科领域来实现生物能量的高效转换和传递,从而降低仿生机器人的能耗,提高能量利用率[47-48]。
5 结 语
基于智能材料的深海执行器和海洋仿生机器人是一个多学科交叉的新兴前沿领域。本文通过对常见的智能驱动材料的结构属性和驱动机理进行介绍,综述了深海执行器和海洋仿生机器人的国内外研究现状和存在的主要问题:
(1)智能材料的应力-应变性能优异,自身可完成电能至机械能的直接输出,从而可免去(或部分免去)耐压和密封结构,整个系统结构简单,具有传统水下驱动器无法比拟的超小重量和体积,是未来传统水下驱动器的优秀替代者,但材料的驱动效率相较于传统驱动器还有一定的差距。
(2)从使用环境、输出力、输出行程、结构、重量、体积等方面综合比较,SMA 是现阶段最具有海洋工程应用前景的智能材料。
(3)传统深海执行器存在重量体积大、可靠性低、噪声和电磁干扰以及生物兼容性差等问题。目前,基于智能材料的水下执行器主要有SMA 驱动器、EAP 驱动器和PZT 驱动器等,且基本处于实验室阶段,其在深海极端环境下的性能参数仍有待进一步研究。
(4)SMA 仿生机器人制作简单、驱动力大、应用范围广,但是散热慢、效率较低;IPMC 仿生机器人运动灵活、输出位移大,但响应频率低、驱动力较小且材料需要液体环境;DE仿生机器人驱动频率高,变形大,但驱动电压高,需要预拉伸来发挥驱动作用,同时需要预设刚性框架支撑;PZT 仿生机器人响应速度快,驱动力大,但驱动电压大,变形小。
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
电脑爱好者(2020年6期)2020-05-26 09:27:33
小哥白尼(趣味科学)(2019年7期)2019-11-16 09:04:14
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
学苑创造·A版(2017年4期)2017-05-13 22:56:42
光学精密工程(2016年5期)2016-11-07 09:06:04
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
上海电机学院学报(2015年3期)2015-02-28 14:29:52