一种双曲面光学系统中次镜装调设计与实现
2022-02-28 12:26杨海金高雪军卞臻臻王新星张鑫杰
应用光学 2022年1期
杨海金,张 平,郝 芳,高雪军,卞臻臻,詹 江,王新星,张鑫杰
(江苏北方湖光光电有限公司,江苏 无锡 214035)
引言
随着航空、航天、航海中超远程、长航时飞行导航的需求,高精度天文导航系统的需求日趋旺盛。天文导航系统(celestial navigation system,CNS)是将自然天体(如恒星、太阳等)作为参照物来得到载体(飞机、航天器、舰船等)位置或姿态的一种导航系统[1],是惯性组合导航系统的重要组成部分。星敏感器、太阳敏感器等是天文导航系统中较为常用的姿态测量系统,其中,星敏感器是将恒星作为姿态测量的观测目标,通过拍摄当前观察范围内的恒星,取得观测星图,测量并确定出当前星敏感器的航向,从而获得航行姿态数据,为飞机等载体的姿态控制或导航系统提供高精度的姿态信息[2-3]。
星敏感器的测姿精度能达到角秒量级,为保证较好的成像质量和导航精度,其成像系统多采用像质几乎达到衍射极限的反射式两镜光学系统。在反射式光学系统中,有卡塞格林(Cassegrain)系统和格里高里(Gregory)系统。卡塞格林系统和格里高里系统只消除了球差,而轴外像差没有校正,使用上受到某些限制。为此,Chretien 提出主镜和次镜都为双曲面,使球差和彗差同时得到校正的改进型卡塞格林系统,由Ritchey 实现,故称为RC 系统。R-C 系统的主次镜均为双曲面镜,主镜为凹双曲面镜,次镜为凸双曲面镜[4-6]。该类系统像质几乎达到衍射极限,对光机系统的装调要求极为苛刻,其中,光学元件的角偏校准精度高于30″,甚至高于10″,偏心校准精度优于0.1 mm,甚至优于0.01 mm,波像差要求也优于(1/2)λ,甚至优于(1/10)λ[7-8]。为此,通过设计好的安装和调试机构使光学元件达到并保持在最佳设计位置,是获取高像质的重要途径。
文中针对小口径次镜设计了一种6 自由度装调机构,可应用于某机载星敏感器使用的R-C 光学系统高精度装调,通过对装调前后系统像质进行测试,验证了机构的稳定性。表明该次镜机构能够满足此类系统像质要求,其中波像差PV 值优于(1/2)λ、RMS 值优于(1/15)λ,装调方法可指导高精度系统批量生产,为R-C 光学系统工程化设计提供了依据。
1 R-C 系统与次镜自由度
星敏感器这类高精度R-C 光学系统中,主、次镜的安装偏离在设计位置时对像质、测量精度等影响极为敏感,因此,二者之间的光学间隔、同心度(中心偏),相对倾斜等需在装调过程中精确控制。文中使用非对称R-C 光学系统,主镜外径110 mm,次镜外径22 mm,次镜的质量远小于主镜,考虑系统稳定性,确定以主镜为装调基准,通过调校次镜实现系统的高像质。从运动学角度来讲,次镜存在6 个自由度[9],如图1所示,即X、Y、Z3 个方向的位移和绕X、Y、Z3 个方向的旋转。因此,设计次镜装调机构时需满足这6 个自由度的调节,消除球差、彗差等一系列像差,使得成像质量达到最佳状态。
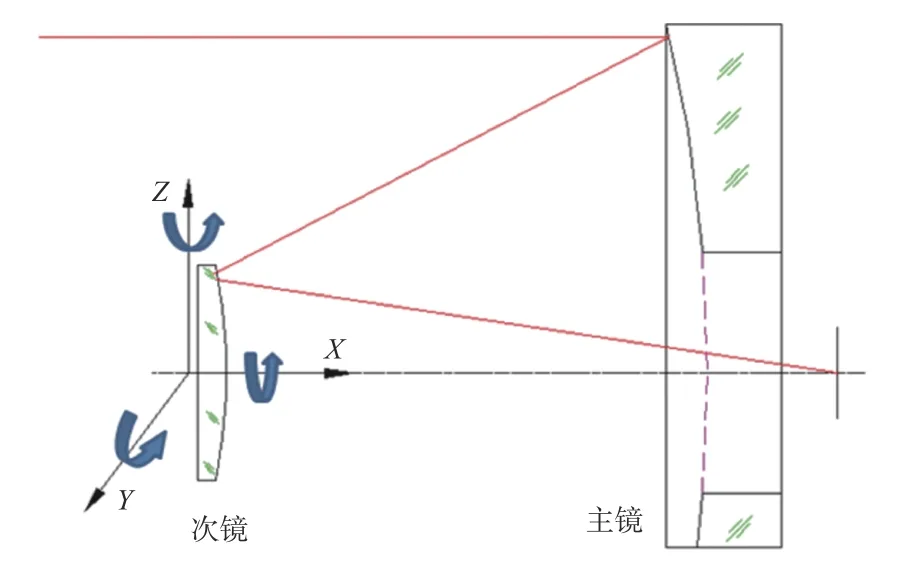
图1 非对称R-C 光学系统及次镜自由度Fig.1 Asymmetric R-C optical system and degrees of freedom of secondary-mirror
国外星敏感器发展较早,技术较为先进,对次镜安装多采用波像差检测与在线装调法。安装和调校方式主要有两种:一是挠性安装方式,这种方式主要针对口径和质量较大的光学系统,在次镜中设计有挠性装置,利用计算机辅助装调方式实现在线装调,有效消除和减小重力及加速度对系统像质的影响,如图2所示;二是胶结方式,采用专用6 爪机器人在线安装,机器人将次镜置于一体化设计的主、次镜支架中,光路经过粗调,依据干涉仪反馈的参数和Zernike 多项式迭代的数据不断调整,直至到达理想位置后,机器人完成点胶、照射固化、去应力等,实现在线装调。

图2 挠性安装示意图Fig.2 Schematic diagram of flexible installation
目前,国内对次镜自由度调节方法多采用“三推三拉”式结构。即在次镜框背面设计3 个顶丝和3 个拉杆,调校时利用转动螺纹对次镜框反复“推”、“拉”,实现理想位置的调整。该种结构能够实现5 个自由度的调整,相对简单,成本低。但其存在明显的缺点,如无固定转动点(或轴),调整中心偏时不仅会造成倾斜失调,还会造成已调整好的两镜间隔发生改变,特别是长焦距系统,这是影响像面位置偏离设计值的主要因素。同时,在调整两镜间隔时又会破坏中心偏和倾斜调整结果。“三推三拉”结构形式下的各个自由度的调校不为独立,关联性太强,造成调校过程非常繁琐、耗时,且规律性、重复性很差。更为重要的是,调节结束后的推、拉力将造成系统存在较为明显的应力集中问题,应力释放后系统会出现像质恶化等,造成系统稳定性差,严重时会导致系统需要重新调校和试验。因此,改进次镜装调的结构形式是改善装调应力的有效手段,作者设计一种用于小口径次镜的安装和调校机构,能有效避免该类问题,提高高精度光电系统的稳定性。
2 次镜机构设计与装调
2.1 机构组成与选材
文中设计的调节机构示意图如图3所示,A 为局部放大图。图3 中次镜安装在次镜框内,调节筒与次镜框螺纹连接,次镜框的两边设计了第一球形隔圈和第二球形隔圈。次镜框组、第一球形隔圈和第二球形隔圈的外径均小于支架筒的内径,两者存在一定的间隙,用于实现次镜中心偏的调校。在第一球形隔圈和第二球形隔圈外侧用次镜压圈旋紧,使得次镜框组、第一球形隔圈以及第二球形隔圈被压紧。图3 中序号1~11 依次为支架、主镜、第一调节孔、第一次镜压圈、第一球形隔圈、第二调节孔、第二球形隔圈、垫圈、次镜、次镜框、调节筒。机构在X、Y方向移动量范围为0.5 mm,Y、Z方向的转动范围为3°。其中,X方向移动调节螺矩为0.5 mm,Y方向移动调节螺矩和Y、Z方向的转动调节螺距为0.35 mm。一般直径4 mm 的手柄,手感调节可小于10°。计算可得机构在X方向移动调整精度为0.0013 mm,Y方向移动调整精度为0.000 97 mm,Y、Z方向的转动调整精度为9″。调节精度满足主次镜间隔误差为±0.01 mm,中心偏误差为±0.01 mm,相对倾斜误差为30″的校正要求。

图3 次镜装调机构Fig.3 Schematic diagram of secondary-mirror adjustment mechanism
星敏感器主要应用于空间航天、飞行器等设备的高精度位置坐标测量,应用环境变化多样,结构件环境稳定性直接影响了系统精度,系统整体质量的减小是目前轻量化设计的普遍要求。因此,在调校机构设计过程中除了需要结构合理外,还应考虑各结构材料的选取[10]。文中选取钛合金TC4作为主要的结构件材料,主、次镜玻璃选用微晶玻璃,经Zemax 软件仿真分析,结果如图4所示。从图4可看出,在20 ℃、−50 ℃、70 ℃条件下系统能量集中度均大于75%,满足系统环境适应性和轻量化要求。
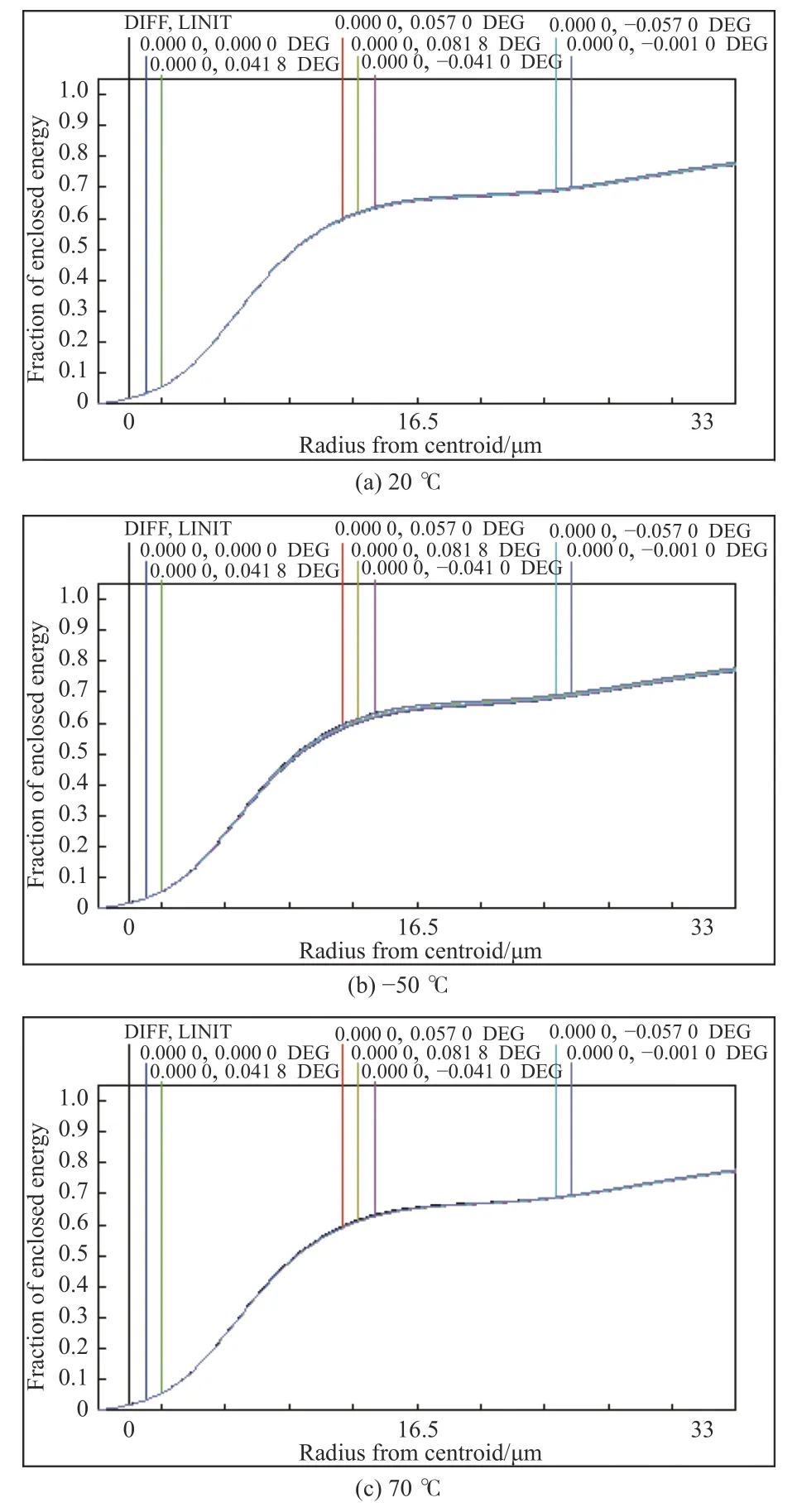
图4 系统在20 ℃、−50 ℃、70 ℃下能量集中度曲线Fig.4 Energy concentration curve of system at 20 ℃,-50 ℃and 70 ℃
2.2 装调与固化
将主次镜系统置于校正好的干涉光路中,如图5所示。图5 中1 为R-C 系统,2 为标准平晶,3 为基准平台,4 为干涉仪,干涉仪为ZYGO 干涉仪,波长λ=0.632 8 μm。
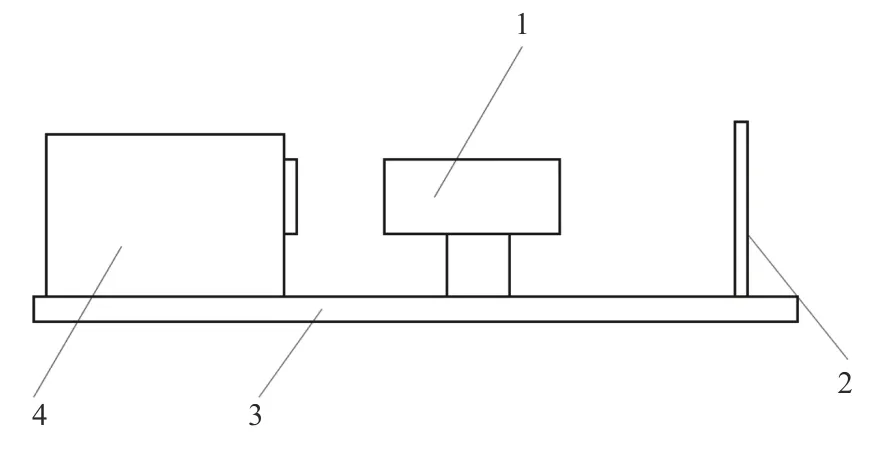
图5 装调装置示意图Fig.5 Schematic diagram of adjustment device
文献[11]给出了失调量(X、Y方向移动量和Y、Z方向的转动量)与像差之间为线性和近似线性关系。利用次镜在各个自由度上的调节,参照干涉仪显示的PV 值和RMS 数据以及干涉图,调节次镜失调量至理想位置,可以使得光学系统成像质量提升,最终固化系统可得到稳定像质[12-13]。具体实现方法如下:
1)次镜与主镜间隔直接影响系统的像散、彗差和球差,而倾斜和中心偏不会带来球差,因此通过调整图3 中序号8 隔圈厚度可实现X方向上的移动量调节,调整两镜间隔处于系统要求的±0.01 mm范围内,中心视场球差小于(1/20)λ;
2)对于非对称结构,通过转动图3 中序号11调节筒可实现X方向上的转动量调节;
3)次镜的中心偏对系统彗差影响较为明显,利用调节钉通过图3 中序号6 第二调节孔对序号5第一球形隔圈施加Y、Z方向的力,实现Y、Z方向上的转动量调节,倾斜失调量小于±30″后,系统彗差优于(1/20)λ;
4)次镜倾斜对像散和彗差均有影响,利用调节钉通过图3 中序号3 第一调节孔对序号11 调节筒施加Y、Z方向的力,实现Y、Z方向上的转动量调节,同步于中心偏调整,处于系统要求的±0.01 mm范围内,像散将优于(1/20)λ。
5)装调是不断迭代的过程,中心偏和倾斜的调节可配合开展,便于彗差和像散的快速收敛,提高效率。调校过程中,图3 中序号4 处于预压紧状态,使得次镜框在Y、Z方向具有自由度,又不会出现轴向间隔变化,调校完毕后锁紧压圈。
装调机构稳定性往往对系统功能、性能都起着关键性作用,对于高精度系统来讲,将系统调校至理想状态是非常不易的,然而更不易的是如何消除调校后各种应力对机构稳定性的影响,使其长期处于理想状态。文中次镜采用弹性安装技术,即次镜安装在镜框中,不采用直接用压圈压紧的传统安装方式,采用弹性粘结的方式,使其在环境应力剧烈变化时不发生脱胶、损坏和像质明显恶化等问题。为保证弹性和强度,粘结剂使用室温硫化硅橡胶,胶层厚度设置为0.2 mm~0.3 mm[14-16]。光学元件和结构件之间不完全注满粘结剂,留有温度应力带来的膨胀空间,这一点很重要。另外,由于固化和温度变化期间,粘结层的尺寸变化正比于被粘结的面积,所以粘结面积不要太大。如果反射镜质量很大且必须使用比较大的总面积时,可以将它分为多个小的粘结区域。最小粘结面积可用以下公式确定:

式中:W为光学零件的质量;aG为恶劣条件下的加速度;fs为安全系数(安全系数最小是2,考虑到一些没有达到设计理想条件的情况,如清洁度不够等,安全系数可能取4);J为粘结区(胶斑)的抗剪强度或者抗拉强度(通常情况下相等)。
为了保证一致性,将胶斑设计为多个圆胶斑。圆胶斑的直径按以下公式确定:

式中n为胶斑个数。
图6(a)为次镜弹性安装示意,图6(b)为系统检测实物场景。系统完成调校后,仍置于光路中释放调校应力,待系统PV、RMS 测试值持续稳定,通过图3 中序号6 第二调节孔,用皮下注射器注入室温硫化硅橡胶,完成固化。
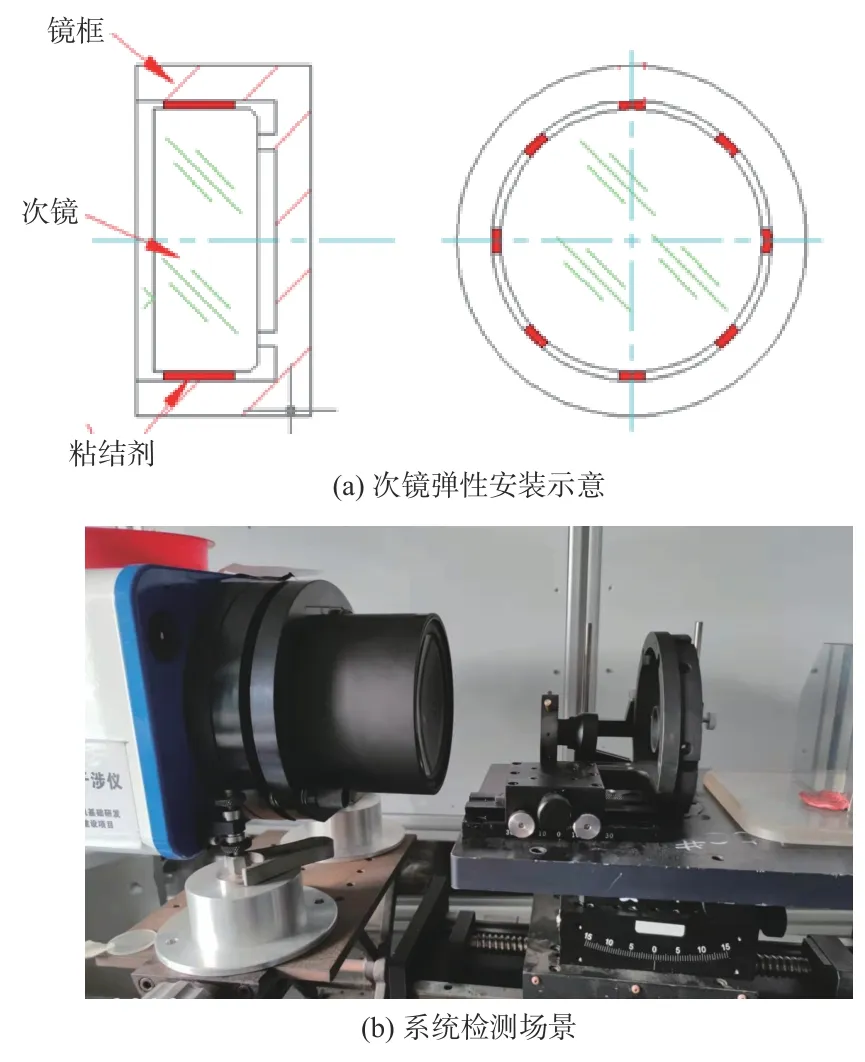
图6 弹性安装示意图和系统检测场景Fig.6 Schematic diagram of flexible installation and system detection scenarios
3 验证
首先,在装调过程中对固化前后系统的波像差进行测试验证;其次,依据使用环境对系统进行相关环境试验。
系统干涉图如图7所示。图7(a)和图7(b)分别是固化前后的系统干涉图,图7(c)~7(f)分别是高温、低温、冲击、震动试验后检测的系统干涉图。系统PV 值和RMS 值如表1所示。
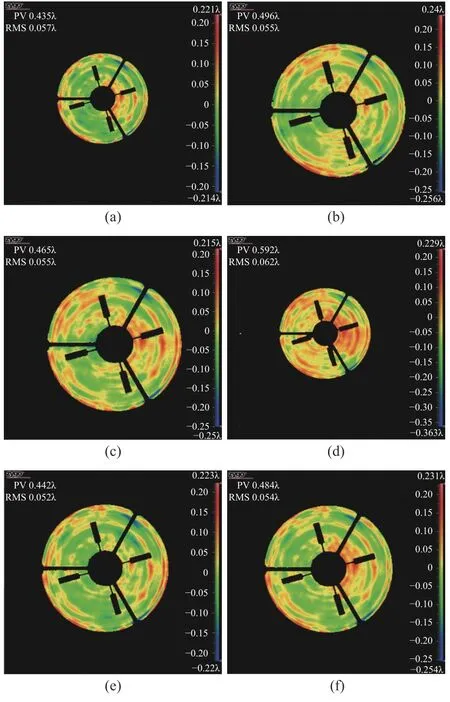
图7 系统干涉图Fig.7 Schematic diagram of system interference
从表1 中可以看出:1)固化前后波像差变化很小,说明固化过程中应力消除得很好,未对系统像质造成不良影响。2)系统经过环境试验后,PV 值与RMS 值的变化在同一数量级内,系统像质未出现恶化,说明装调机构稳定性较好。
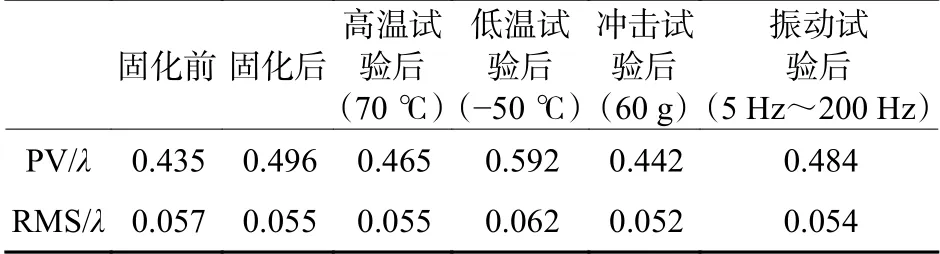
表1 系统试验数据Table 1 System test data
测试结果显示,采用文中设计的次镜装调机构R-C 光学系统,在经过环境试验后依然保持了良好的性能,验证了调校机构具有非常好的装调性和稳定性,满足星敏感器等高精度测试系统的环境使用要求。
4 结论
针对R-C 光学系统在星敏感器应用中存在光学调校效率低、调节复杂、稳定性差等问题,分析了装调的多重性、复杂性,以及解决现有问题的必要性。设计了一种用于方便调节次镜6 自由度的机械结构,该结构可实现R-C 光学系统中以主镜为基准的次镜失调量装调,次镜的弹性装调安装,也可用于卡塞格林等两镜式反射系统中。解决了星敏感器实际过程中调校复杂度高和效率低等问题,实现了光学系统的RMS 值优于(1/15)λ,缩短了装调周期,取得了较好效果。同时,结合理论分析和实际试验结果,验证了该调节机构在固化后具有良好的稳定性。
猜你喜欢
荆楚理工学院学报(2022年2期)2022-09-16
家庭影院技术(2020年7期)2020-08-24
家庭影院技术(2020年5期)2020-08-24
郑州大学学报(工学版)(2018年3期)2018-05-03
幸福(2018年3期)2018-03-13
家庭影院技术(2017年9期)2017-09-26
中国光学(2017年4期)2017-08-01
中国眼镜科技杂志(2017年6期)2017-03-28
幸福·婚姻版(2017年3期)2017-03-24
山东工业技术(2016年15期)2016-12-01