直升机光电系统网络协同目标瞄准方法
2022-02-28 12:25胡雷刚白委宁
应用光学 2022年1期
王 琳,周 俊,胡雷刚,白委宁
(1.陆军航空兵学院 某研究所,北京 101121;2.西安应用光学研究所,陕西 西安 710065)
引言
光电系统是直升机实现目标瞄准、跟踪、定位功能的全天候电子侦察设备。光电系统对目标瞄准主要依靠人工参与完成,由于地面背景复杂,光电系统视场范围小,目标机动等原因,利用光电系统搜索目标的时间较长,存在目标发现难、跟踪难的问题。随着网络信息技术和数据链的发展,利用数据链提供的目标指示数据,快速引导光电系统进行目标捕获、跟踪,实现网络协同目标瞄准,是当前直升机光电系统探测目标的重要发展方向。
利用数据链引导光电系统快速瞄准目标,涉及数据链应用、目标信息处理、光电传感器管理等多项关键技术。近年来,国外已在Sniper、ATFLIR、Litening 等光电系统上增加了双向数据链和组网能力,并在光电系统与地面部队、空中力量之间建立了信息网络,实现了视频图像和信号情报的近实时交换和处理。上述光电系统大多采用了地理定位、地理跟踪和地理扫描等方式,并具备对时敏目标的高精度位置解算和跟踪探测能力[1]。国内对机载光电系统与数据链综合实现目标快速瞄准的研究相对较晚,成果较少。文献[2]分析了机载光电平台的自主引导精度,研究了地面目标由大地坐标系向光电系统坐标系的转换误差,并利用无人机平台进行了飞行试验验证;文献[3]研究了机载光电平台的目标定位误差,重点分析了载机惯导误差和光电系统指示误差对目标定位精度的影响;文献[4]提出了一种适用于机载光电观瞄系统的线性运动补偿方法,并在光电观瞄系统挂飞试验中进行了验证。这些研究成果重点对光电系统瞄准目标过程中的坐标转换误差、载机惯导误差、运动补偿问题进行了分析,基于多源传感器协同的目标定位算法也有助于提高目标的瞄准精度[5,14-15]。
在网络信息条件下,除上述因素外还需要考虑数据精度、延迟时间、数据率等因素对网络协同目标瞄准的影响。作者针对网络协同目标瞄准的需求,以直升机光电系统为对象,提出光电系统网络协同瞄准的基本方式,分析网络协同瞄准误差,并通过仿真和实验重点研究数据精度、数据率、延迟时间等对光电系统网络协同目标瞄准的影响。
1 光电系统网络协同目标瞄准
1.1 光电系统目标瞄准方式
直升机光电系统主要由可见光摄像机、红外热像仪、激光器等高精度测量设备组成,具有探测精度高、隐蔽性好等特点。可见光摄像机和红外热像仪包含大、中、小3 个视场,其中大视场主要用于大范围目标搜索,中、小视场(长焦距状态)用于目标跟踪和瞄准。由于光电系统在长焦距状态下视场小,因此要实现对目标的精确瞄准,必须先解决如何快速捕获目标的问题。
传统直升机侦察探测过程中,主要依靠飞行员完成目标瞄准,即首先利用光电系统的大视场随机搜索目标,待发现目标可疑区域后,逐步缩小视场范围,实现对目标的瞄准和跟踪。由于光学系统视场探测范围有限,搜索目标的时间长、效率低,即使目标进入了大视场范围,因为地面背景复杂及目标伪装、机动等原因,直升机仍难以快速准确瞄准目标。
1.2 网络协同目标瞄准方式
随着数据链和网络信息技术的发展,传统光电系统对目标的瞄准方式也发生了深刻改变。直升机网络协同瞄准是由网络中的平台(如无人机、侦察直升机、预警机、地面侦察单元等)探测目标信息,然后利用数据链将目标信息发送给直升机,根据数据链提供的近实时目标信息,解算目标在光电系统坐标系下的方位角和俯仰角,控制光电系统按照解算角度工作,快速引导目标进入光电系统的瞄准视场,并用图像视频跟踪的方法捕获和跟踪目标。网络协同目标瞄准可以解决光电系统目标探测效率低的问题,能够缩短捕获和跟踪目标的时间,提高直升机空空、空地协同探测能力。
2 网络协同目标瞄准误差分析
直升机光电系统网络协同瞄准误差主要与数据精度、数据率、传输延时以及光电系统指示误差和响应时间等有关。
1)数据精度
数据链是网络单元之间进行信息传输的通信链路,其信息精度由网络中提供目标参数的传感器或平台决定。数据链信息包括目标的位置、速度、角度等,网络中的传感器(如侦察雷达、目标侦察系统等)在测量目标状态信息时由于自身探测性能的原因存在一定偏差。
2)数据率
由于目标信息处理、数据链通信、使用环境等各种因素影响,数据链的目标数据率会给目标状态估计带来影响,并影响目标瞄准解算精度。
3)传输延时
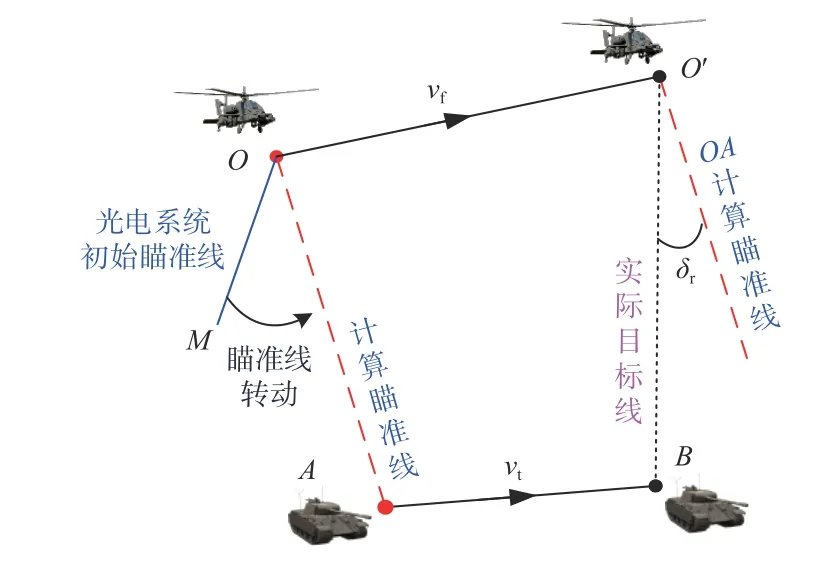
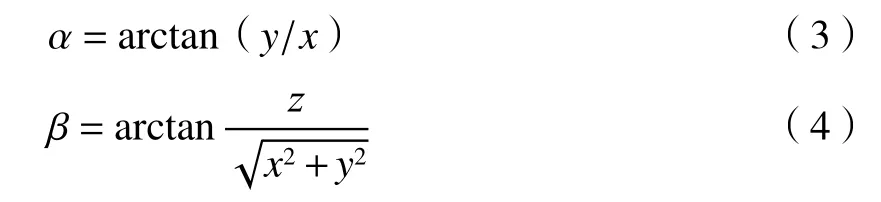
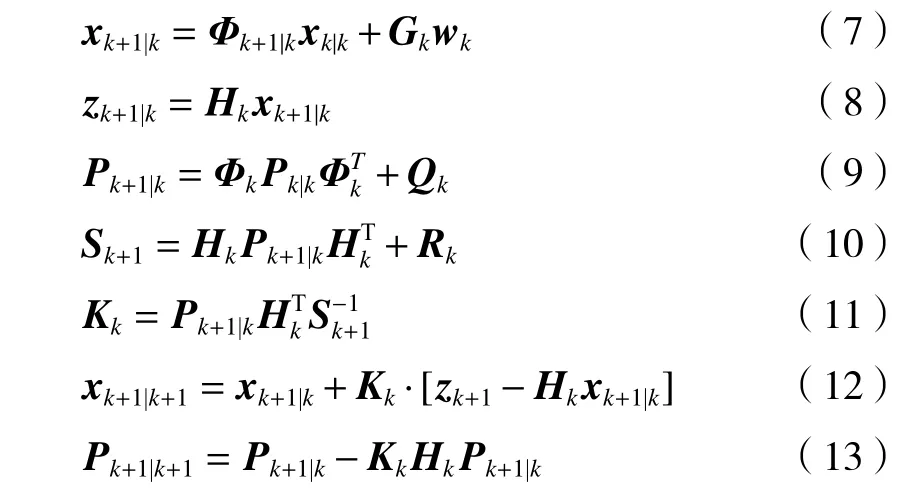
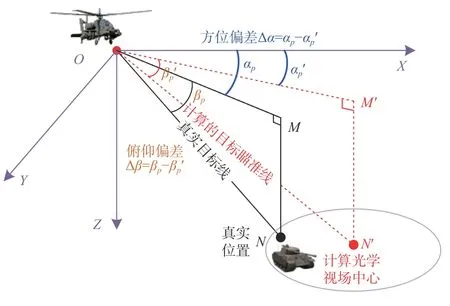
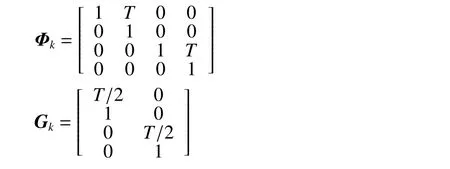
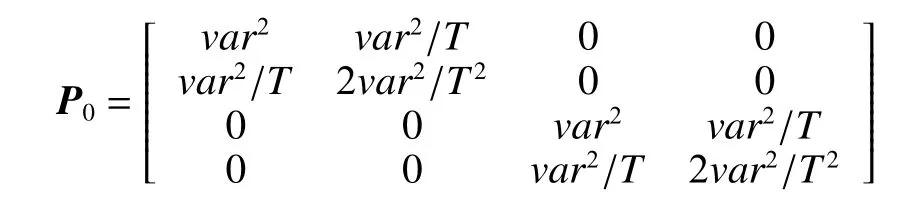
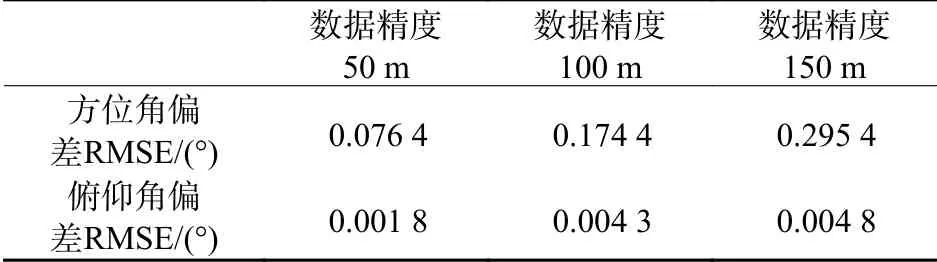
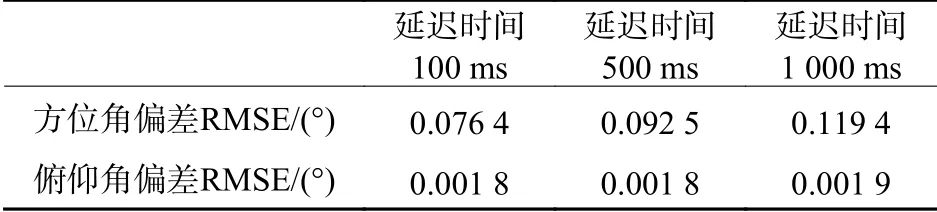
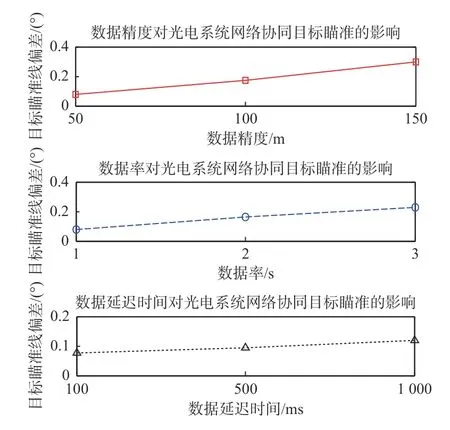
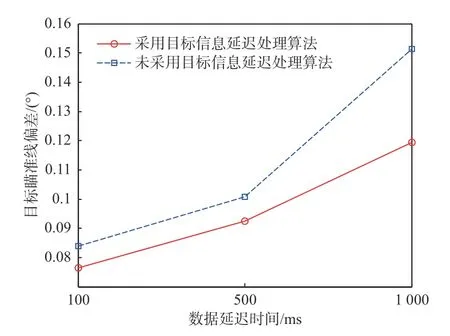
数据链信息在从网络平台传输到直升机平台的过程中会产生传输延迟,使接收到的目标信息产生误差,进而影响光电系统的目标瞄准精度[5]。数据链传输延迟与数据包格式、消息类型、传输距离、处理时间、网络参与组、传输接入模式、堆栈网络数、终端数等有关,主要由数据包发送和到达的时间确定。有关资料[6-7]显示,Link-16 系统的延迟时间一般为40 ms~100 ms;先进战术瞄准目标数据链(TTNT)的传输距离D<185 km 时传输延迟小于2 ms 时,传输距离185 km 4)光电系统指示误差 直升机光电系统的指示误差用系统响应指令转动并达到稳态后与指令之间的位置误差表示[8]。误差有统计值和最大值之分,一般用mrad表示。如图1所示,系统指令位置在OP,光电系统实际的瞄准线为OP´,两者之间的位置误差即为δz。δz属于系统误差,它反映了光电系统响应指令的情况,δz越小,指示误差越小,光电系统的性能越好。 图1 光电系统指示误差Fig.1 Indication error of electro-optical system 5)光电系统响应时间 在网络协同目标瞄准过程中,光电系统的伺服控制有一定的响应时间,由于直升机和目标的相对运动,会产生一定的瞄准误差,如图2所示。直升机位于O点,速度矢量为,地面目标位于A点,目标速度矢量为,光电系统的初始瞄准线为OM,根据数据链信息解算的目标瞄准线为OA。光电系统在伺服系统作用下控制瞄准线由OM向OA转动,系统响应时间为Ts。经过Ts后,直升机由O点运动至O′点,目标由A点运动至B点。将真实目标线O′B与计算瞄准线OA之间的角度偏差 δr定义为响应时间偏差,δr与光电系统的转动角速度、直升机和目标的机动方式等有关。 图2 光电系统响应时间引起的瞄准误差Fig.2 Aiming error caused by response time of electrooptical system 在网络协同目标瞄准过程中,直升机同时接收数据链的目标信息和惯导系统的载机信息,由于数据链信息、直升机惯导信息、光电系统分别位于地理坐标系、机体坐标系和基座坐标系中,目标信息解算前需要进行统一的坐标平移和坐标转换。通常机体坐标系与基座坐标系的同名轴重合,因此只考虑地理坐标系与机体坐标系之间的转换,坐标转换采用齐次坐标转换方法[9-10]。 1)坐标转换矩阵 机体坐标系(OXYZ)f相对于地理坐标系(OXYZ)e的转换关系为 2)坐标平移变换 设目标在地理坐标系和机体坐标系的坐标分别为(xe,ye,ze)和(x,y,z),机体坐标系的原点在地理坐标系的坐标是(a,b,c),则转换关系为 3)光电系统瞄准角度计算 经过坐标转换和平移变换后,将目标从地理坐标系转换到基座坐标系,实时计算出目标相对于基座坐标系的方位角 α和俯仰角 β,利用光电伺服控制系统,将光电系统的视场中心实时转换到指定角度,实现对目标的稳定跟踪。即: 式中:x、y、z为目标在光电系统坐标系中的位置坐标 ;α 和 β为光电系统的瞄准方位角和俯仰角。 数据传输延迟会影响目标的信息精度,并对目标瞄准误差产生影响。设目标的状态方程和量测方程分别为[11] 针对数据传输延迟问题,在卡尔曼滤波算法中引入延迟补偿,对数据链的目标数据进行滤波,通过前一时刻的目标信息和已知的滞后时间,预测并补偿得到当前时刻,以克服数据延时滞后的影响。目标信息延迟处理算法分为量测修正、状态修正、状态预测及补偿。状态修正确定k时刻的最佳状态估值和协方差,状态预测产生k+1时刻的先验估值和误差协方差。为了补偿数据延迟,使延迟的量测数据与滤波器的估值一起传播,这里数据传输延迟为0.5 s~1 s。 设数据传输延迟时间为td,则增加延迟补偿环节后的卡尔曼滤波算法为 目标量测补偿值为 根据目标量测补偿值,利用(7)式~(13)式就可以估计出延迟td后的目标状态向量。 光电系统的测量参数包括方位角、俯仰角和目标距离。由于数据精度、数据率、传输延时、光电系统指示误差和响应时间等因素影响,真实目标线ON与计算目标瞄准线ON′之间存在方位偏差 Δα和俯仰偏差 Δβ,如图3所示。图3 中N为目标在机体坐标系内的真实位置,N′为计算的光电系统光学视场中心,M、M′分别为N、N′在机体坐标系XOY平面内的投影。 图3 光电系统俯仰偏差和方位偏差示意图Fig.3 Schematic diagram of pitch and azimuth deviations of electro-optical system 采用蒙特卡罗方法分析计算光电系统网络协同目标瞄准的方位偏差 Δα和俯仰偏差 Δβ。光电系统瞄准线偏差估计方法如下: 1)根据直升机本机测量参数和数据链测量参数的误差分布特点,确定直升机位置、航向和目标位置参数的测量误差; 2)对直升机的位置参数和数据链的目标参数进行随机抽样处理; 3)根据3.2 节中的目标信息延迟处理算法进行目标状态外推估计; 4)根据目标状态估计结果,利用(3)式和(4)式计算网络协同目标瞄准线的角度参数; 5)根据真实目标线和计算的目标瞄准线,估计光电系统的方位角偏差和俯仰角偏差。 通过仿真实验来研究直升机光电系统网络协同目标瞄准方法。直升机平台惯导误差也是影响光电系统网络协同目标瞄准的重要因素,其误差大小与惯导系统精度有关,可将其近似为系统误差。仿真研究中对部分模型进行了简化处理,假设系统固定偏差已经消除,只存在多个随机误差因素。试验中直升机的初始位置为1 000 m、500 m、100 m,直升机在空中保持平飞的速度为80 km/h、20 km/h、0 km/h;地面目标的初始位置为2 500 m、6 000 m、0 m,目标在地面做匀速运动的速度为50 km/h、20 km/h、0 km/h。 式中:T为数据链的数据率;var2为量测噪声的方差。 设量测矩阵为 实验选取不同数据精度、数据率和延迟时间进行仿真计算,研究它们对光电系统网络协同目标瞄准的影响。默认初始参数设置为[12-13]:数据精度为50 m(1δ),数据率为1 s,延迟时间为100 ms;仿真时长为200 s。在分析数据精度的影响时,设置数据精度分别为50 m(1δ)、100 m(1δ)、150 m(1δ),数据率为1 s,延迟时间为100 ms。在分析数据率的影响时,设置数据率分别为1 s、2 s、3 s,数据精度分别为50 m(1δ),延迟时间为100 ms。在分析延迟时间的影响时,设置延迟时间分别为100 ms、500 ms、1 000 ms,数据精度为50 m(1δ),数据率为1 s。光电系统方位角和俯仰角偏差为100 次Monte Carlo 仿真计算的平均值,仿真实验结果分别见表1、表2、表3 和图4所示。在相同仿真条件下,未采用目标信息延迟处理算法的瞄准线偏差对比如图5所示。 表1 数据精度对光电系统网络协同目标瞄准的影响Table 1 Influence of data accuracy on network cooperative target aiming of electro-optical system 表2 数据率对光电系统网络协同目标瞄准的影响Table 2 Influence of data rate on network cooperative target aiming of electro-optical system 表3 数据延迟时间对光电系统网络协同目标瞄准的影响Table 3 Influence of data delay time on network cooperative target aiming of electro-optical system 图4 数据精度、数据率、延迟时间对比Fig.4 Comparison of data accuracy,data rate and delay time 图5 目标瞄准线偏差对比Fig.5 Comparison of target aiming line deviation 通过以上分析可以看出:数据精度、数据率和延迟时间都是影响光电系统网络协同目标瞄准的主要因素。为了减小网络协同目标瞄准的误差,应尽量减小数据延迟时间,同时提高数据率和数据精度。此外,采用合理的目标信息延迟处理算法,对提高目标状态估计精度、减小目标瞄准线估计误差具有一定作用。 网络协同目标瞄准是直升机光电系统探测目标的重要方向,利用数据链提供的信息能够快速解算出目标方位角和俯仰角,引导光电系统快速对目标区域进行搜索。本文提出了直升机光电系统网络协同目标瞄准的基本方式,分析了网络协同目标瞄准误差,仿真研究了数据精度、数据率、延迟时间对光电系统网络协同目标瞄准的影响。直升机光电系统网络协同目标瞄准方法还可适用于其他平台,下一步可采用多源信息融合技术来减小网络协同目标瞄准误差。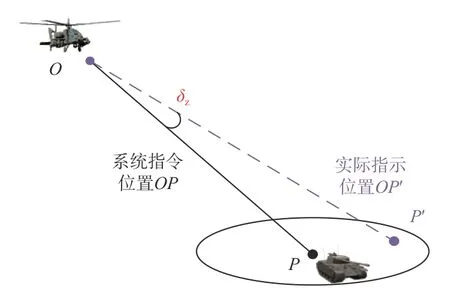
3 网络协同目标瞄准信息解算
3.1 目标信息坐标转换


3.2 目标信息延迟处理算法


3.3 光电系统瞄准线偏差估计
4 仿真实验分析

5 结论
猜你喜欢
导航定位学报(2022年2期)2022-04-11
煤气与热力(2021年3期)2021-06-09
沈阳航空航天大学学报(2021年1期)2021-03-18
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
湖南邮电职业技术学院学报(2020年3期)2020-10-13
北京航空航天大学学报(2019年9期)2019-10-26
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
北京航空航天大学学报(2017年3期)2017-11-23