主动磁测距技术在T1井封井工程的应用*
2022-02-28 07:44车阳乔磊袁光杰林盛杰郑磊杜卫强刘天恩
石油机械 2022年2期
车阳 乔磊 袁光杰 林盛杰 郑磊 杜卫强 刘天恩
(中国石油集团工程技术研究院有限公司)
0 引 言
主动磁测距技术主要用于解决救援井与事故井的有效连通难题。主动磁测距技术在国外相对成熟。C.L.WEST及A.F.KUCKES等[1-2]研发了主动磁测距工具,成功用于多口井喷失控井的救援连通[3-4],如2010年墨西哥湾井喷泄油事故的救援。国内学者也在主动磁测距的方法和方案中开展了相关研究,李翠等[5]研究了主动磁测距的算法,提出了硬件设计方案。郭建军等[6]开展了主动磁测距工具的地面测试。李峰飞等[7]分析了主动磁测距的工具,提出了提高探测范围和探测精度的方法。张生林[8]研究了瞬变电磁法救援井井下探测与定位系统并开展了地面试验。
国内主动磁测距技术研究处于起步阶段,下井工具的研制和应用方面尚属空白,为解决这一问题,笔者自主研制了国内首套CPET(CNPC Engineering Technology R & D Company Limited)主动磁测距系统,形成主动磁测距数据解释方法和封井方案。该技术配套井眼定向控制关键技术并成功应用于T1井封井工程,打破了国外在该领域的垄断。
1 主动磁测距技术
1.1 系统结构
CPET主动磁测距系统总体结构主要分为地面采集单元、激励电源、绞车及电缆、电极、遥传及测量探管几部分,如图1所示。
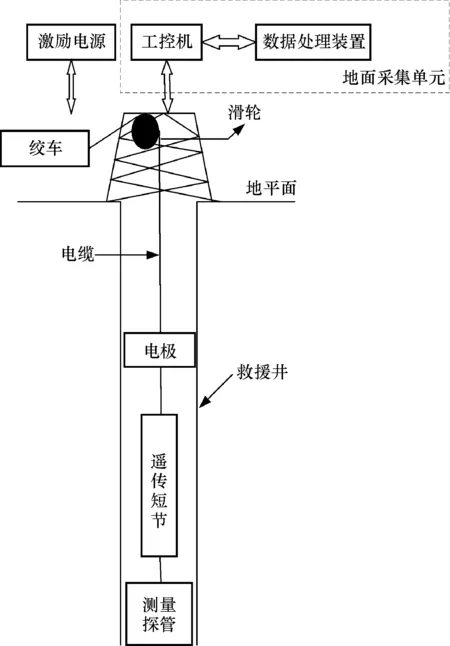
图1 CPET主动磁测距系统结构示意图
工具的主要性能参数如下:激励电源的工作电压为220 V;绞车及电缆最大提升力为20 kN;下井工具的外径最大为120 mm,总长30 m,耐温125 ℃,耐压150 MPa;遥传的速率为19 200 bit/s;探管中的磁传感器测量精度为0.05 nT。
1.2 工作原理
主动磁测距系统工作时,电极向救援井周围地层注入电磁波,电极注入地层的电磁波呈球形对称分布,如果电极附近地层中存在套管或钻杆,由于金属材质的电导率要远大于地层,所以电磁波大部分将在套管或钻杆处聚集,形成如图2所示的沿套管向上和向下流动的电流[9]。根据安培定律,该电流将在套管和钻杆的周围地层中产生低频交变磁场。利用救援井中探管内的磁传感器检测套管或钻杆内向下流动的电流产生的低频交变磁场的磁场强度。该磁场信号的强度与事故井套管上的电流成正比,与探管和事故井的间距成反比[10]。

图2 CPET主动磁测距方法
上述物理过程为有源电磁场,用麦克斯韦方程组表示为:
(1)
式中:∇·表示散度;∇×表示旋度;He(r,t)表示施加电性激励源的磁场强度,T;Ee(r,t)表示施加电性激励源的电场强度,V/m;Je(r,t)表示施加电性激励源的电流密度,A/m2;ρe(r,t)表示电性激励源的电荷密度,C/m;σ表示电导率,S/m;μ表示磁导率,H/m;ε表示介电常数,F/m。
同时,探管也会检测到救援井周围地层的地磁场(磁北)和重力场(高边),用于确定探管的自身方位和摆放姿态。利用这些数据计算井下探管与事故井套管的间距和方位,从而确定救援井与事故井在水平面和井底圆平面的相对位置关系,如图3所示。

图3 救援井与事故井的相对位置
1.3 封井方案
要对目的层位进行有效封堵,找到老裸眼井眼是关键。现场施工中,在定向钻具组合中接入MWD(Measure While Drilling)或随钻陀螺等测斜仪器,提离井底一定高度测斜,根据测斜数据预测当前井底位置的姿态(井斜和方位)。钻至指定井深后,起钻更换CPET主动磁测距工具测量救援井井底和事故井的相对位置。根据姿态和相对位置的测量,再起钻更换为定向钻具组合控制救援井轨迹向前钻进,如此反复直到连通老井。
按连通点的不同,连通方案分为套管开窗重入、套管鞋重入以及裸眼落鱼平行逼近重入,如图4所示。现场实施时应根据具体特点选择不同的主动磁测距封井方案。
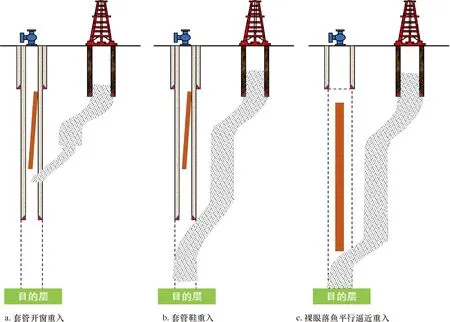
图4 主动磁测距封井方案
1.3.1 套管开窗重入
如图4a所示,连通点为上部套管。主要优点是钻进周期短,一旦碰套管可以判定顺利重入;缺点是套管外部开窗的难度大,若开窗的窗口小,重入后钻具上提时卡钻的风险高。
1.3.2 套管鞋重入
如图4b所示,连通点为套管鞋。主要优点是重入后风险低;缺点是钻进周期长,主动磁测距在套管鞋以下失去目标,若没有明显显示将无法判定是否顺利重入。
1.3.3 裸眼落鱼平行逼近重入
如图4c所示,连通点为目的层,优缺点同套管鞋重入方式,只适用于老井井眼轨迹尤其是裸眼段确定性强的情况。
2 井况及难点
2.1 T1井井况
T1井是一口垂直探井,完钻井深2 430.5 m,油层套管仅下至1 287.4 m,以下1 143.0 m为裸眼段。由于其钻穿了储气层,2019年6月3日开始实施T1井封堵作业,在射孔层位封堵过程中水泥返吐造成426.0 m的油管固管,套铣打捞处理于245.9~253.8 m有铁屑返出,下公锥捞获ø88.9 mm(3in)油管一根;继续套铣作业,255.4 m处有岩屑返出,下铅印证实套管在253.0 m处开窗(铅印为半圆形痕迹)、鱼顶丢失。
2019年11月30日,重新上修井机进行找鱼头作业,利用ø195.0 mm铣鞋和自制扶正器(ø194.0 mm)反循环套铣,在253.0~254.0 m处未碰到鱼顶,套铣至254.5 m地层有岩屑返出,进行井下可视测井,判断套管在253.0 m处开窗,终止施工,修井施工后井身结构如图5所示。
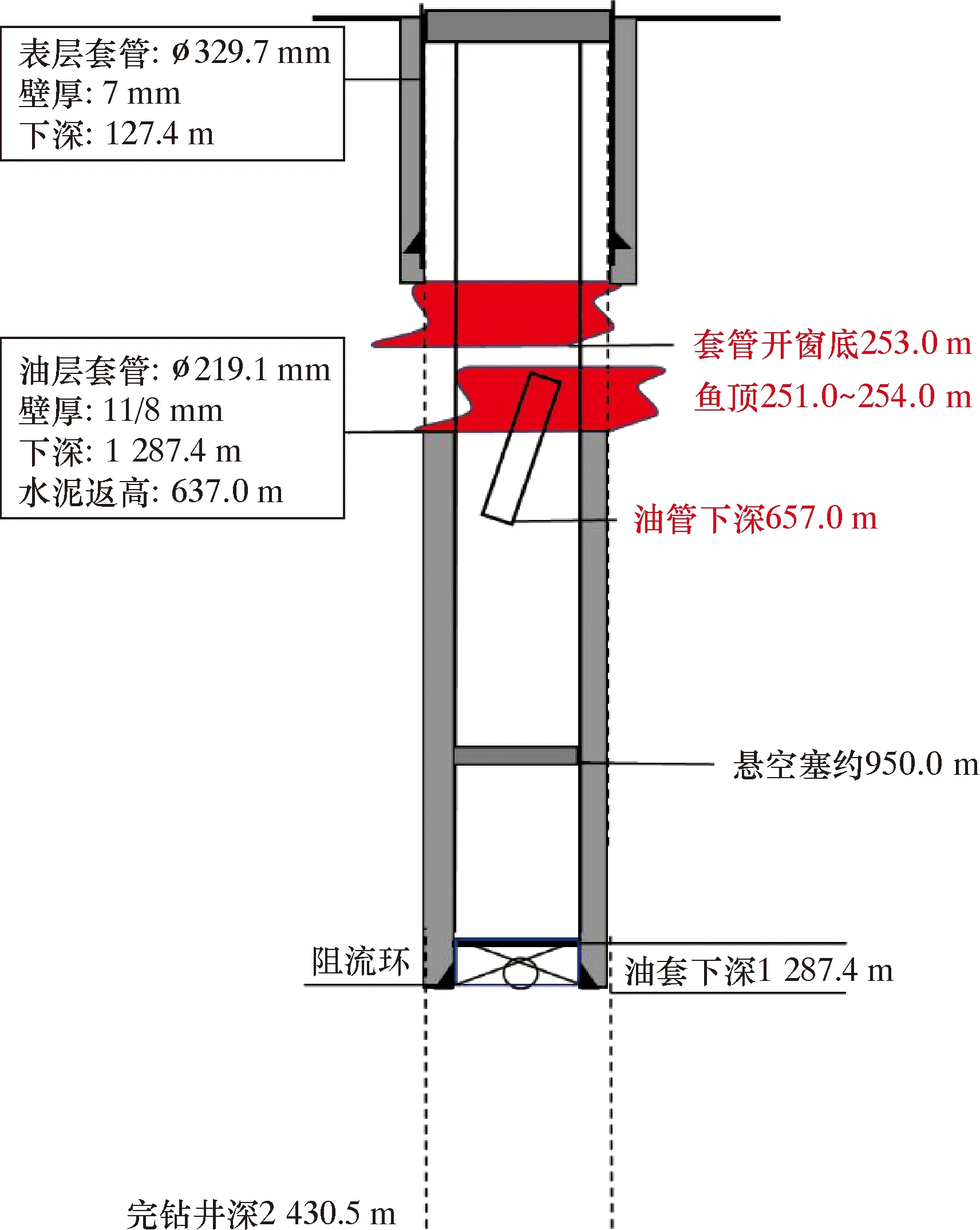
图5 T1井井身结构图
2.2 轨迹实施难点
同常规事故井相比,T1井的完钻时间久远。金属套管易受腐蚀,造成电磁信号衰减迅速,无法确保主动磁测距的精度,也给轨迹设计和控制带来难点。另外,上部地层为软泥岩,存在塌、斜、卡风险,实施难点如下。
2.2.1 目标井轨迹偏差大
T1井完钻时间久远,全井采用单点测斜方法,数据点间距为50 m,资料显示老井井斜最大1.5°,最小0°。当时不具备随钻定向能力,受地层、人为因素影响较大。另外,双坨子气田位于松辽盆地东缘地震带,据资料记载,此处多次发生5级以上的强地震,受地震影响,地层变化频繁,致使T1井的原始井眼轨迹发生改变。因此由原始测斜数据计算的井眼轨迹可参考性不强,与实际井眼偏差大。
2.2.2 目标井轨迹预测难
主动磁测距测量点少,能够测量的是同一垂深条件下救援井和目标井的相对距离方位[11]。此外,受地层性质差异和信号衰减的影响,两井距离较远时磁测距测量的误差扇形区域较大。因此根据已测数据准确计算当前目标井轨迹,特别是预测目标井下步轨迹十分困难。
2.2.3 两井平行轨迹控制难
一是目标井在钻进时使用了不同的钻头类型。井深556.2 m前使用刮刀钻头,余下全部使用牙轮钻头,经过多次扩眼和打捞作业,井眼复杂。而救援井前期使用PDC钻头钻进,PDC钻头和牙轮钻头钻进主要方式分别为切削和研磨,钻头与地层接触方式不同导致其井眼轨迹自然走向有区别。二是井底井斜方位的测量存在空间延迟,误差在米级。三是在接近套管时,MWD受磁干扰无法使用。四是随钻陀螺定向时,受到钻井液、钻具和地层等的振动,稳定测量有挑战[12]。综上,实现救援井平行于目标井钻进十分困难。
2.2.4 重入目标井轨迹难
一是目标井全井轨迹近似为直井,套管外径为219.1 mm,对测量和控制的精度要求在厘米级别。二是若井斜较小,救援井定向的方位难以准确测量;若井斜较大,则碰套管时错过目标井套管的概率大。三是钻至目标井套管鞋附近时,套管上的电流急速衰减,失去了目标信号。因此,重入目标井裸眼段十分困难。
3 现场应用
3.1 井眼轨迹优化
常见的救援井轨迹连通通常有3种方式:精确点连通、平行渐近连通和缠绕渐近连通[13],如图6所示。由图6a可知,精确点连通是救援井点对点连通目标井,轨迹调整少,但测距误差难以校正,交汇概率低;由图6b可知,平行渐近连通是救援井以平行轨迹接近目标井,轨迹调整少,测距误差部分校正,交汇概率较高;由图6c可知,缠绕渐近连通是救援井以螺旋轨迹缠绕目标井,测距误差多次校正,交汇概率高,但轨迹调整频繁。基于井眼连通方式,按照设计和施工两个阶段制定井眼轨迹优化措施。

图6 井眼连通方式
在概念设计阶段,参考原始测斜数据,为便于现场施工,采用“增-稳”五段制交替轨迹剖面设计,如表1所示。造斜率设计在每30 m井段造斜3°左右,保证井眼轨迹平滑,减少造斜段摩阻,降低定向难度系数。
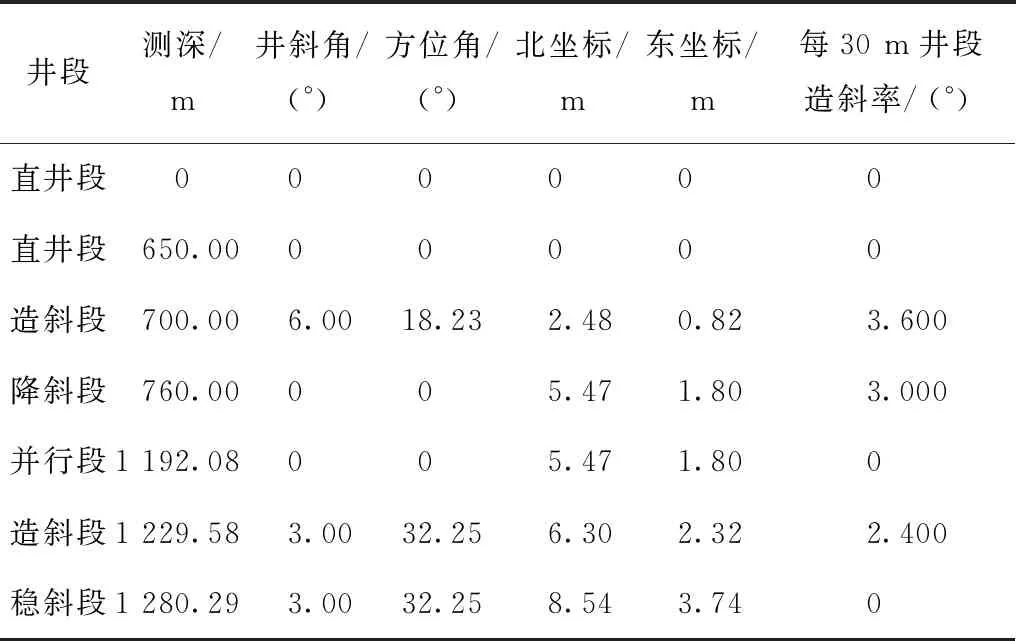
表1 轨迹概念设计剖面
在施工设计阶段,根据主动磁测距测得两井相对位置和救援井井底姿态“边钻边调整”。在接近时救援井的井斜比目标井稍大,维持两井的接近趋势,同时预留方位调整的空间[14]。设计碰套管轨迹施工过程中狗腿度不猛增猛降,接近连通点时稳斜钻进。轨迹施工设计剖面如表2所示。
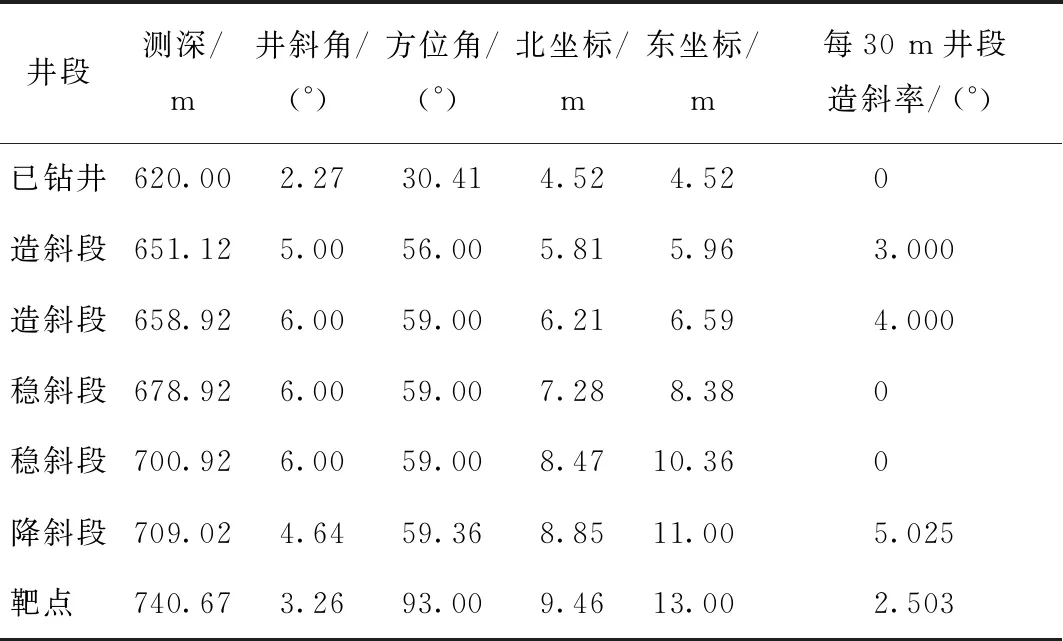
表2 轨迹施工设计剖面
3.2 逐步加密测距
救援井首次钻至850 m时,测量间隔平均100~150 m,导致未能及时跟踪T1井轨迹。经过回填后,进行加密测量增加对老井走向的把握,降低后期轨迹调整的难度,主动磁测距全井测量过程如图7所示。
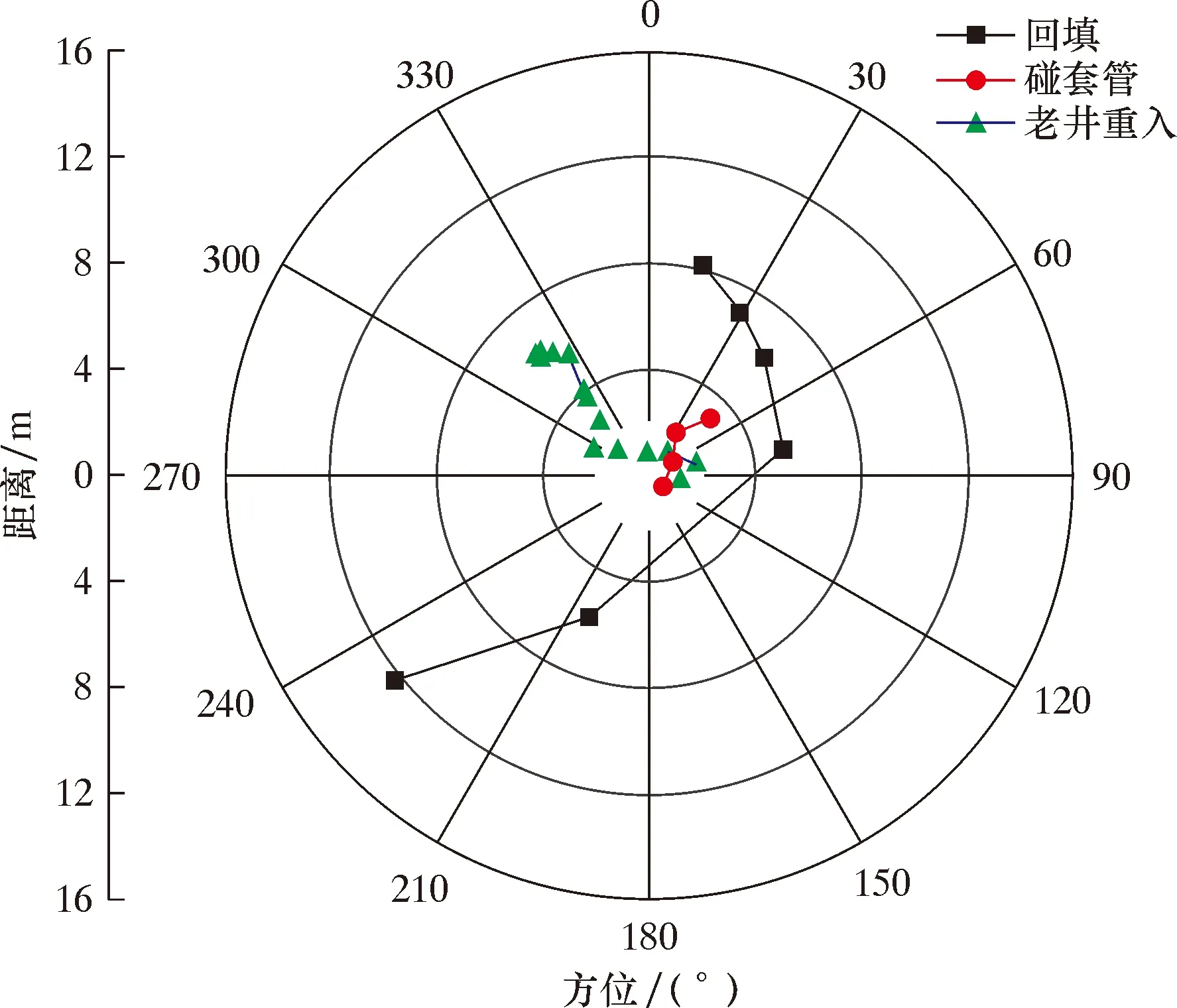
图7 T1井主动磁测距过程
测距间隔d与两井距离r呈正相关。当相对距离大于5 m时,每100 m进行一次磁测距;当相对距离小于5 m时,每50 m进行一次磁测距;当相对距离小于3 m时,每20 m进行一次磁测距,并开始采用陀螺随钻定向;相对距离小于1 m时,每10 m进行一次磁测距,如图8所示。
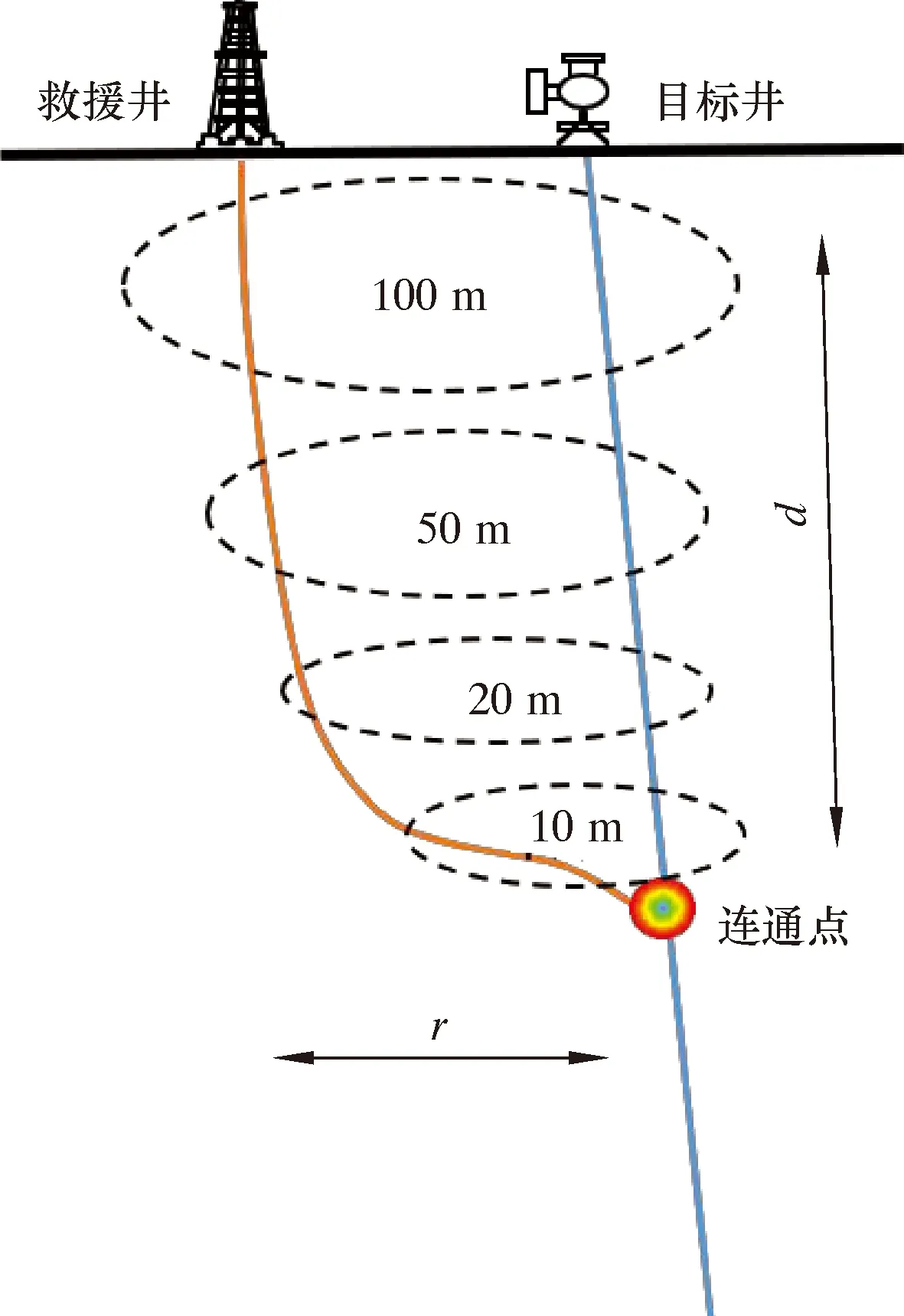
图8 加密测距示意图
3.3 轨迹精细控制
救援井的轨迹控制要求精细,既要求位移达标,又要求井底姿态,否则无法在预计井深接近目标井,也不利于轨迹调整。一开阶段,密切监测井斜,发现地层出现增斜趋势时,及时吊打防斜,控制最大井斜小于0.6°,满足井斜小于1.0°的设计要求;二开阶段,采用主动磁测距配合MWD定向,按定向作业指令钻至井深850 m时,根据测距结果救援井在780 m处与老井空间交叉。对比设计与实钻轨迹,测深700 m以上,实钻轨迹呈欠方位状态;测深800 m以上,实钻轨迹呈过井斜状态,如表3所示。

表3 施工设计与实钻轨迹对比
导致轨迹控制参数出现偏差的原因有两个:①与老井距离近,MWD可能受到老井套管干扰,应提前使用随钻陀螺进行轨迹控制;②目标井的轨迹变化较大,定向间隔过长,监控不到位。
若继续采用降斜扭方位的轨迹控制方法,尚需钻进120 m左右,不确定性大。回填侧钻后进行下一次尝试时,采用下列措施精细控制轨迹:①密切检测磁干扰,有磁干扰立即换随钻陀螺,定向控制更精确;②更换牙轮钻头,定向工具面更稳定;③更换1.25°短螺杆钻具,缩短零长,以减少测控误差;④适当加密磁测距作业频率,密切监控目标井走向[15-16]。
回填后钻进至673.95 m观察到磁干扰,如表4所示。MWD显示地磁倾角和地磁总量有异常,方位角畸变,说明已进入3 m内的“磁干扰区”,此时磁测距得到两井相对距离为2.8 m,对比可知测距的误差在10%以内。发现磁干扰后,使用随钻陀螺代替MWD定向。
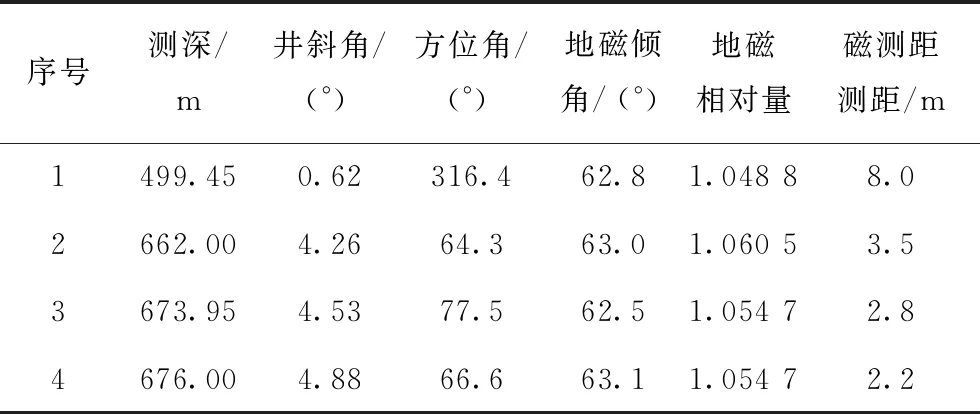
表4 MWD和主动磁测距数据对比
3.4 目标轨迹校正
目标轨迹校正对于指导裸眼段冲探具有重要意义。根据磁测距数据,以救援井实测井眼轨迹为基准,可以反演计算得到目标井的空间位置。具体方法如下:
(1)获取救援井某深度下的磁导向数据,并通过解算得到对应深度两井的相对距离l和磁北方位Φ。
(2)如图9所示,将救援井的实测轨迹投影到NE水平面上,某一测点的可以表示为K1(E1,N1,T1),同一井深条件下对应目标井k1(e1,n1,t1),由几何关系可知:
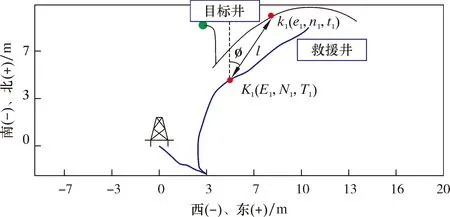
图9 目标井空间位置反演
(2)
式中:KB和kb分别代表救援井和目标井的补心高,m。
将反演的目标井空间位置与井史轨迹数据进行轨迹校正,如图10所示。由图10可知:700 m以上井段误差距离较大,第一个校正点498 m处距离误差为5.21 m,600 m左右距离误差为1.86 m,说明上部井段与井史数据拟合较差;700 m以下井段误差距离在-1~1 m之间,与井史数据拟合较好,说明该段井段井史轨迹数据具有一定可靠性;1 306 m井段有放空现象,将救援井及目标井眼该点校正至同一点,对比新井测量轨迹与原井眼井史数据,可以看出1 350 m处与老井眼距离误差为1.42 m,后续根据裸眼冲探情况不停校正轨迹,判断轨迹误差。
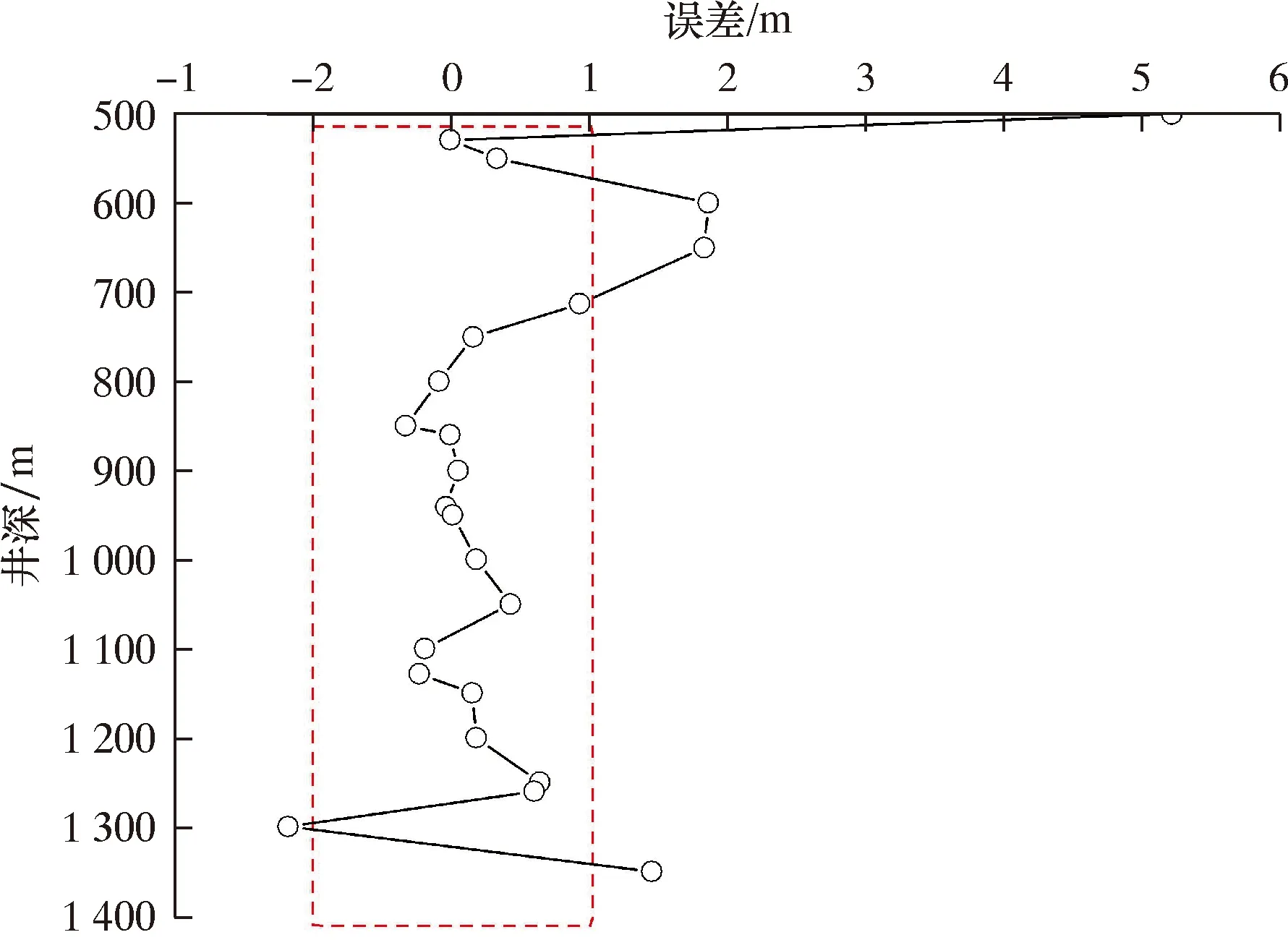
图10 目标井轨迹校正
3.5 技术应用实效
累计开展主动磁测距28次,救援井在705.2 m碰套管,充分验证了技术的可靠性,在1 306.0 m重入目标T1井,后续根据目标井轨迹校正冲探至2 006.0 m,圆满完成此次封井工程。同类井应用效果如表5所示。由表5可知,同国内同类井相比[17],T1井运用CPET主动磁测距系统实现了一次性重入老井眼,效果良好。
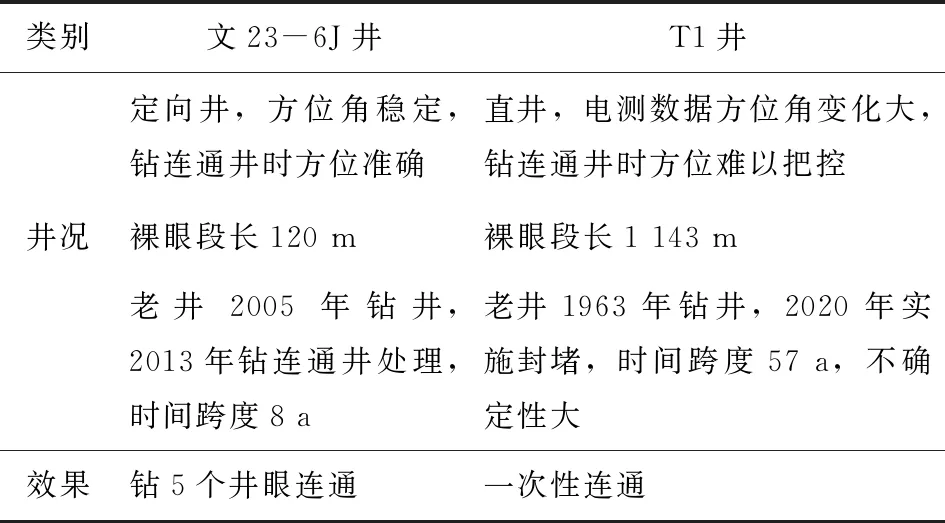
表5 同类井应用效果
4 结论与认识
(1)CPET主动磁测距技术包含系统结构、测距方法和封井方案等技术内涵,可以满足储气库老井重入的需求,具有较高的推广价值。
(2)主动磁测距技术现场应用过程中通过井眼轨迹优化和精细轨迹控制等手段,再配套随钻陀螺定向工具,实现最终的T1井裸眼重入目标,为封井工程的成功奠定了坚实的基础。
(3)主动磁测距技术是一项系统工程, 需在实践中不断发展、完善,以提高储气库老井封堵的理论和学科水平。
猜你喜欢
油气·石油与天然气科学(2021年12期)2021-12-11
人民长江(2021年9期)2021-10-18
油气·石油与天然气科学(2021年6期)2021-09-10
当代化工(2020年11期)2020-12-17
大众摄影(2018年6期)2018-06-19
科学与技术(2018年10期)2018-04-26
佛山陶瓷(2017年8期)2017-09-06
武昌理工学院学报(2016年4期)2017-01-17
企业技术开发·下旬刊(2016年8期)2016-10-13
党的生活·党员电教与远程教育(2009年2期)2009-05-13