基于UDS协议的新能源汽车整车控制器故障诊断研究
2022-02-28 10:39何国俊
内燃机与配件 2022年5期
关键词:应用探究
何国俊

摘要:随着新能源汽车技术水平的不断更新,先进的汽车整车控制技术被运用不同车型中,但当前整车控制技术还是不太成熟,有着较大的提高空间。其中新能源汽车整车控制器的优化升级是目前亟待解决的问题,UDS协议的新能源汽车整车控制器适合动态测量,它拥有强大的输出能力,并且配用的电路较为简单,性能较为稳定,一直是汽车测试中的首选。本文基于UDS协议的新能源汽车整车控制器故障诊断研究,以此来为我国汽车测试提供一些见解和贡献。
Abstract: With the continuous renewal of new energy vehicle technology, advanced vehicle control technology is used in different models, but the current vehicle control technology is still not mature and has a lot of room for improvement. Among them, the optimization and upgrade of the new energy vehicle controller is a problem that needs to be solved urgently. The new energy vehicle controller of the UDS protocol is suitable for dynamic measurement. It has a strong output capability, and the equipped circuit is relatively simple, and the performance is relatively stable. , Has always been the first choice in automotive testing. This article is based on the research of the fault diagnosis of the new energy vehicle controller based on the UDS protocol, in order to provide some insights and contributions for my country's vehicle testing.
關键词:UDS协议;汽车测试;应用探究
Key words: UDS protocol;automotive testing;application exploration
中图分类号:U46 文献标识码:A 文章编号:1674-957X(2022)05-0127-03
0 引言
随着新能源汽车技术的不断升级,我国新能源汽车集成化、模块化程度也在不断提高,操控性和舒适性的提升更是有目共睹。新能源汽车由复杂的电气和高压的电气部件构成,在没有诊断功能和安全控制策略的情况下,是很难获取汽车的故障信息,并且新能源汽车出现故障时会造成严重后果。所以对新能源汽车控制器的性能要求和质量标准也十分的严格。汽车控制器必须得长期经受复杂工况的严苛考验,所以对监测的精度和可靠性还有反应速度和抗压能力都有较高要求。只有合格的控制器才能更加准确的实时性的监测驾驶车辆的正常运行工作状态。它们能否稳定工作,将直接影响车辆的正常行驶。现代汽车维修监测技术是汽车日常检修的一项核心技术,其主要通过与汽车电子化和智能检测技术的有效紧密结合,实现了在汽车日常维修过程中的故障诊断、记录与故障排查功能,并将汽车有关故障信息实时存储至内置的监测设备的源代码中。汽车维修监测技术是指通过对各种汽车维修故障情况进行合理、有效地监测分析,来完成汽车故障的排查,对于新能源汽车整车控制器的故障排查起到了关键的作用。
1 CAN 总线 UDS 协议故障诊断架构
近年来随着新能源汽车技术的突飞猛进,汽车安全性以及操控性都有了很大的提高,这也是衡量新能源汽车质量的重要标准。国家制定了严格的安全法规以规范新能源汽车行业,为了满足安全法规的要求,新能源汽车企业对车辆进行系统功能上的调整与改进,并采用多种安全测试方法来保证汽车的安全控制性能,其中汽车电子技术的优化起了重大的推动作用。汽车控制器作为电子控制系统的重要部件,也是其核心领域的研究技术之一。零件的精度和可靠性还有反应速度和抗压能力都有较高要求,只有装备高水平的自动控制器才能更加准确的实时性的监测驾驶车辆的正常运行工作状态,它们能否稳定工作,将直接影响新能源汽车安全行驶。
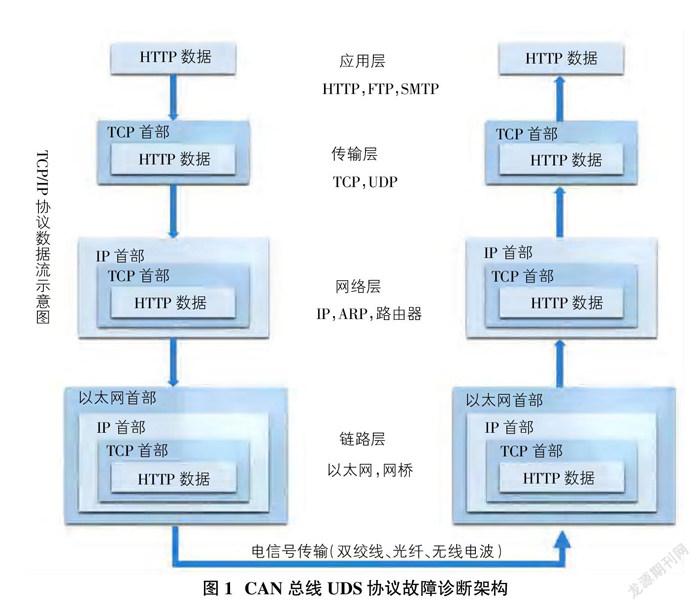
随着车载故障智能诊断技术不断发展,ISO组织为了研究车载故障智能诊断分析网络协议,制定了目前已在国际上广泛通用的车载故障智能诊断分析网络协议。该协议在全球大多数国家通用。本文主要介绍用UDS诊断协议来定义故障智能诊断的各个网络系统属性,确定它的网络CAN总线的网络属性,根据网络系统架构可以大致细分为四层,其中主要部分包括物理层、数据系统层和网络链路层、网络层和数据系统中的应用层和管理层。基于它的PLC的网络CAN总线UDS故障诊断网络协议,见图1,根据系统基础建立以及设计工作过程,主要大致可细分为以下几个基本设计步骤:
①使用者可以按照自身的应用需要来确定故障诊断功能要求,在多个协议中通过分别选取一个协议对应的用户故障诊断服务功能来界定应用级,而根据这些约定,对于需要通过应用协议实现的各个故障诊断,在文中通过依次选择应用协议的诊断业务功能,来具体分析并定义故障诊断分析业务。
②基于层的CAN总线,ISO15765-2协议可以来直接指定在网络故障与应急诊断处理架构体系中的网络级。网络层的主要功能之一是按照客户要求,统一定义各个应用层网络并进行数据通讯传送以及所有数据包之间的通讯传输服务,并通过对网络底层的所有数据单元、数据包类型和传输方式等分别作出了明确界定,来直接实现基于CAN总线上所有数据包的传送、包装、解包等主要功能。为网络故障应急诊断处理过程架构中的网络服务器以及所有互联网客户端的数据通讯传送服务奠定了信息基石。
③基于帧的CAN总线ISO11898-1协议明确通信故障数据诊断网络架构系统中的故障数据链接线路网络层和物理层。在故障诊断信息传递过程中,数据链接线路层将网络层诊断传输数据的不成帧信号进行解析分解,将故障数据诊断传输发送到帧CAN总线上,并将帧在CAN总线上的诊断数据成帧信号传输发送给网络层。为网络层诊断提供物理服务,并通过成帧信号处理和数据差错跟踪监测技术来有效保证数据的诊断传输线路稳定性和诊断准确性。根据不同功能线路需要首先来明确定义物理层,对通信接口的主要机械线路特性、功能线路特性、电气线路特性、传输线路特性等要素进行明确定义,为数据链接线路的分层诊断提供物理服务。
1.1 新能源汽车CAN总线
目前,国际通用的总线是CAN总线,CAN总线是车载控制器局域网络的简称,具有技术成本低、运行简单方便、环境适应性强、可以多对多发送数据、防止总线拥堵、干扰率和出错率低等优点。CAN总线技术可以实时精确控制总线上的报文及节点,还可对网络实行分布式控制,提高网络安全性和可靠性。
1.2 CAN总线通信技术分析
根据CAN总线协议规范,CAN总线的通信接口包含架构中的数据链路层和物理层功能。通信时通过发送帧来传输数据,通常帧的类型有四种:数据帧、远程帧、错误帧和超载帧,CAN总线的报文结构有两种:标准帧和扩展帧。
从发送节点往总线发送的是数据帧,其接收对象是CAN总线上的接收报文的节点,CAN总线上主要的数据传输是由数据帧完成的;远程帧和数据帧的格式大体一致,但远程帧中没有数据域,其发送对象为报文接收节点,接收对象是和接收节点ID一致的报文发送节点,在通信时为了成功完成数据传输,接收节点向发送节点发送远程帧,催促发送节点发出报文;当总线上连续出现6个显性位时就进入错误标识位即出现错误帧,CAN总线上的其他节点也将发送错误被动标识,为了进一步防止总线发送错误的信息而导致异常,CAN总线协议设置了一套完整的错误帧管理机制,也就是当节点不停的发送主动错误的信息时,总线会直接关闭,通过延迟报文的接收时间,来降低总线负载。所以,当接收点处理数据的能力进一步饱和的时候,那么CAN总线通信时为了等待数据帧或者远程帧发送后的ACK应答,调整数据帧的优先级设置了帧间空间,所以,主要由间歇和总线空闲组成,需要注意的是只有数据帧和数据帧,远程帧和远程帧之间才设置有帧间间隔,其他帧无帧间间隔。
2 整车控制器故障诊断
电气系统故障主要进行基于时域的检测:机械故障主要进行基于信号频域的检测;与模型相关的故障则进行基于累计数据的检测。其作用为判定故障的类型、发生部位和故障的严重程度以及发展趋势。可以根据故障的严重程度决定电机的运行、制定维修计划。不同的故障等级对应不同的故障处理方法,尤其是在车辆的驾驶过程中,通过严重的故障检测,整车控制应进入故障模式,并对驾驶员发出警告,安全停车等待救援;而对于轻微故障,在保证行驶安全性的前提下,可以进行容错的处理,可使车辆跛行回家,或行驶至维修点进行故障维修。将具体故障以故障码的方式进行存储。故障码的存储有静态存储值和动态存储值。实际上,可以通过静态的存储进行外部测试,信号基本不变,可以通过使用控制系统不断进行重复的编程,而动态的储存值是可以被内部故障信号进行置换的。静态存储值即写入程序的值,动态存储值为写入flash等掉电存储的存储器中的值。
2.1 系统需求分析
在深入研究基于UDS协议的新能源汽车整车控制器故障诊断的过程中,发现当前故障检测系统的主要功能对于UDS协议主要体现有以下几个层面的功能。第一个就是远程视频信息监控的主要功能,可以通过智能手机或者平板电脑上的移动监控设备连接来实时监察其现场的远程监控视频信息,通过传输设备再连接到移动端,进而帮助设备进行操作。鉴于传统监控系统的诸多局限性,新能源汽车企业在设计新系统时需要更加先进的视频监控功能;第二是智能识别动态目标的系统,当汽车行驶时此系统实时检测动态目标并预警,改善驾驶体验、增强安全性。监控系统要想进行全方位的监控,不仅需要采集车辆现场信息,同时也要对于各个环境的指标进行监控以及预警。除此之外,还需要硬件设施的实用性强,在功能不受影响的同时可以选择成本较低,体积较小,扩展性较强的硬件模块。
2.2 自动化数据使用
在实际应用中,新能源汽车充分利用UDS各方面的优势采用先进的故障诊断技术对自身的各个工作环节进行实时监控。UDS的智能监控系统以PC服务器端为中心,可充分发挥CAN总线的性能优势对控制器中的数据信息进行传输,并对其进行及时的保存。在编写控制器故障检测程序时,要遵循相关的数据传输原则,及时优化存在差异的细节,保证计算机通讯的顺畅性。在系统实现远程实时监控的工作过程中,要对监控服务器端的监控函数数据变化的情况进行实时监测,并进行实时监听。服务器的监控工作管理流程较为复杂,在实际的监控工作流程运行管理环节中,要注意保证主机控制器与主机摄像头之间采集视频数据的实时准确性。因此当对新能源汽车整车控制管理系统用户界面信息进行数据初始化自动处理后,要根据监控系统正常运行的实际工作情况自动重启监听服务,及时进行主机网络的实时监听。当系统有其他客户端数据接入时,要及时创建与其他客户端的实时连接,准备实际的监听接收数据,这大大提升了监控的效率。
UDS协议作为新能源汽车整车控制系统的主要组成部分,在监控管理领域中发挥这重要作用,如图2,主要就是利用了其较为智能化的技术特点,对新能源汽车运行情况进行实时监测并实时监控可能出现的故障。这种自动化的监控手段比传统人工监控作业更准确、更快速,它能实时预测故障发生的可能性,并且迅速地做出预防措施,能更加好地提高了监控质量及安全水平。
3 结论
新能源汽车技术突飞猛进的发展要求其故障诊断系统必须紧跟技术潮流,不断优化升级,而整车控制器是新能源汽车故障诊断的核心所在,是重中之重,目前已经基本实现了故障的实时监测、故障处理、故障信息存储和交互式诊断通信等功能,可以说它就是新能源汽车的"大脑"。先进的PC端故障诊断功能比传统故障诊断仪更加高效,功能也更加强大,整车控制器优化升级,对新能源汽车故障诊断是十分重要的。基于UDS协议的新能源汽车整车控制器故障诊断模块能够充分利用先进诊断技术根据新能源汽车实际工作情况,实时监测新能源汽车动力电池系统、驱动电机系统、操控系统、安全驾驶系统等模块的各项性能指标、数据,同时进行分析判断,确定出故障发生位置以及推测故障发生原因并将故障信息存储在ROM存储器中。
参考文献:
[1]岳刚,刘侠.高速动车组车载水箱控制器故障检测与诊断技术研究[J].电气开关,2018(01).
[2]關文举.关于汽车电子电器故障检测技术的研究[J].山东工业技术,2018(04).
[3]彭玲.汽车电子电器故障检测技术研究[J].当代旅游(高尔夫旅行),2017(05).
[4]魏涯峰,谢锐,邓慧芳,杨冀豫.基于无线配置重触发的力学传动参数测试系统设计[J].仪表技术与控制器,2019(02).
猜你喜欢
科学与财富(2016年29期)2016-12-27
考试周刊(2016年97期)2016-12-26
读与写·教育教学版(2016年12期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
数学学习与研究(2016年22期)2016-12-23
商情(2016年42期)2016-12-23
读与写·教育教学版(2016年12期)2016-12-23
考试周刊(2016年95期)2016-12-21
科学与财富(2016年26期)2016-12-01
人间(2016年26期)2016-11-03