
基于载波相位差的室内定位系统研究
2022-02-25 00:44奚润开吴键陈灵王鑫
机械制造与自动化 2022年1期
奚润开,吴键,陈灵,王鑫
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
近年来,信息化、智能化的生活方式越来越受到关注,位置信息服务可以给人们生活带来很大的便捷[1]。
应用广泛的GNSS全球导航卫星系统[2]在遇到障碍物时会衰减或者散射,而且在遮挡较多的室内环境下有很大的局限性,这也使得位置信息服务难以开展。室内定位技术开展过程中会面临许多难题。首先,室内环境比较复杂,传感器通常需要在非视距(NLOS)情况下完成测量任务,且墙壁等密集设施产生严重的多径干扰,这使得测量数据准确性大打折扣。其次,以TOA、TDOA[3]为主的基于时间测量定位系统对发射以及接收节点的时间同步要求极高,每1 ns的时钟误差会造成30cm定位误差,这使得定位系统的成本大大提高。
为应对室内环境复杂多变、大量障碍物干扰的情况,本文对基于载波相位差[4-5]的室内定位系统进行了研究与实现,借助433MHz载波信号较强的穿透能力与绕射能力,通过信号到达节点两端接收天线相位差值的测量实现室内多遮挡、非视距的复杂环境下的目标定位功能。与性能优异的UWB室内定位技术[6]相比,该系统不需要高精度的时间同步,且频谱占用少、定位范围广,在非视距环境下,433MHz的载波信号有着较强的绕射以及穿透能力,与传统的WiFi、Bluetooth等定位技术[7-8]相比有着更高的定位精度。
1 定位原理
图1给出了载波相位差定位系统在二维平面内某一节点的接收天线与信号源的关系。在A、B两个观测点上的接收天线与定位目标C的距离分别为d1、d2,两个观测点的间距为d3。载波信号由位于目标位置的全向天线发出,两个接收天线与信号处理模块组成一个负责检测载波相位差的传感器节点。
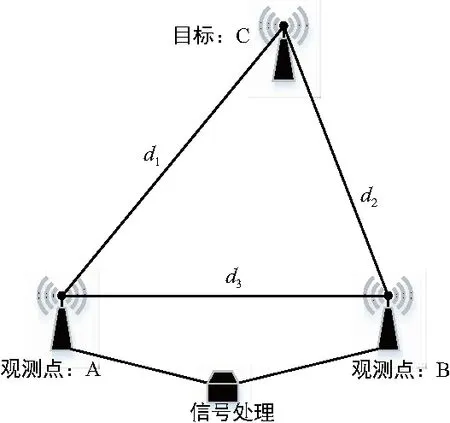
图1 定位目标与接收机的几何关系
在室内平面坐标系中,假设目标C的天线几何中心的坐标为(x,y),x和y都为待测量,观测点A、B的天线几何中心的坐标分别为(xA,yA)和(xB,yB),它们都为已知量。目标与观测点间距表达式为
(1)
d1和d2的差值可以用未知量x和y表示。同时,该距离差值可以双天线结构的传感器节点进行测量。
假设节点接收天线A、B在某时间点的载波信号的相位为φA与φB,它们可以表示为
(2)
式中:RA与RB分别表示信号源到接收天线A、B的距离;λ表示载波信号的波长;δtr和δts分别表示传感器节点的时钟误差以及信号源的时钟误差;NA和NB表示天线A、B接收到的载波信号整周模糊度;εlA和εlB分别表示接收天线A、B与信号处理模块之间的硬件电路对信号相位产生的偏差;εnA和εnB为载波相位测量时由于测量噪声产生的相位偏差。硬件电路对相位的影响可以采用精密匹配的信号接收电路消除,使εlA和εlB的差值可以忽略不计。
在双接收天线信号传输电路精密匹配的情况下,相位差ΔφA,B可以表示为
(3)
为了方便分析,将式(3)两端对2π取余。由于NA和NB都为整数,取余后可以消除,而测量噪声对相位值的影响εnA和εnB远小于一个周期,取余后可以将其保留。结果可以表示为
(4)
(5)
由式(5)可知,忽略测量噪声的影响,最终相位差检测值位于(-π,π)之间。通常情况下,相位差检测电路难以判断信号到达的先后顺序,所以最终的检测结果一般为正值,其范围为(0,π)。
综上所述,在理想情况下,该双天线结构传感器节点的相位差测量值可以表征室内坐标系内任意一点的距离差绝对值信息即目标所在的双曲线。
2 定位算法
本文室内定位系统的距离差方程可以表示为以下形式:
R2i-1,2i=R2i-R2i-1=
(6)
式中:i为观测点编号;n为观测点组数即传感器节点的数量。
现将式(6)在(x0,y0)处一阶泰勒级数展开,可得
R2i-1,2i=R2i-R2i-1+
(7)
根据式(7)得出其残差Ψ的矩阵表示:
ψ=H-Gδ
(8)
式中δ、H、G为:
(9)
采用最小二乘算法计算δ的最小二乘估计:
δ=(GTG)-1GTH
(10)
经过上述步骤,待修正坐标的估值为
(11)
最后判断(|Δx|+|Δy|)是否达到预期的阈值,若不满足要求,用修正坐标继续进行最小二乘迭代,直到满足阈值要求。
3 系统设计
系统的总体设计方案如图2所示。定位系统主要由信号源模块、传感器节点、基站节点等组成。
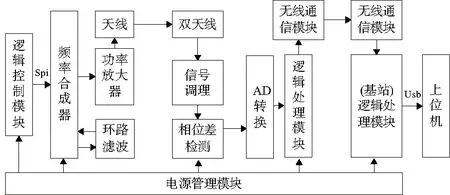
图2 定位系统总体方案设计
图2中信号源模块负责433 MHz正弦波信号的产生与发送,主要由stm32主控芯片、锁相频率合成芯片、环路滤波器、电源和天线组成。频率合成器选择某公司的ADF4351产品。ADF4351有简易的SPI接口,可用于数字信号控制。本文选择使用stm32F103C8T6控制芯片[9]。环路滤波器采用典型的三阶环路滤波。信号源模块结构如图3所示。
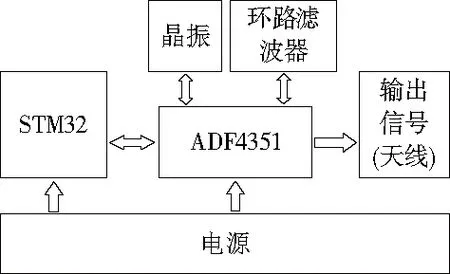
图3 信号源结构
无线传感网络中的传感器节点在室内定位系统中负责利用双天线采集目标发出的433 MHz信号,并利用无线模块将数据上传。传感器节点主要由两根433 MHz高增益天线、AC耦合电路、相位差检测电路、STM32主控模块以及CC2630无线通信模块组成。其结构框图如图4所示。
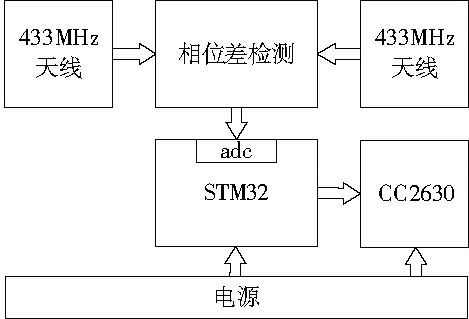
图4 传感器节点结构
基站节点由路由器(Router)和协调器(Coordinator)节点组成。基站节点选择采用两片CC2630芯片搭建。IEEE802.15.4标准协议嵌入在片内ROM中,在ARM-Cortex-M0处理器上单独运行,能够独立进行网络的组织以及数据的收发。CC2630的Cortex-M3内核负责逻辑处理,主要包括与主控芯片的串口通信。STM32F103RCT6主控芯片主要负责接收处理无线模块的数据,上传至上位机。基站节点的结构框图如图5所示。
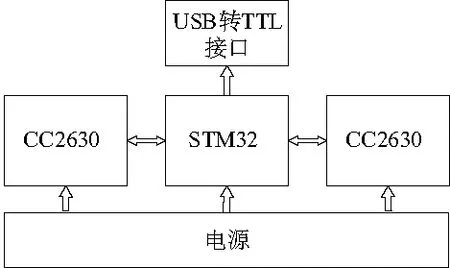
图5 基站节点结构
4 定位算法仿真结果分析
本章节利用MATLAB2017b对基于先验坐标与泰勒级数展开的最小二乘迭代算法进行仿真。
此次仿真的定位范围为9m×6m的矩形空间,设置6个传感器节点,节点坐标如表1所示。选择9个测试点模拟定位目标(信号源)。传感器节点中心在图中用黑色实心正方形表示,测试点用黑色实心三角形表示。
在仿真过程中给载波相位测量值叠加0%~5%波长的随机测量噪声。对每个点分别进行20次定位运算,其中由直线排列的传感器节点组测量的先验坐标使用红色小点表示,定位算法的结果使用绿色小点表示。最终的仿真结果如图6所示。仿真结果的最大误差与算法迭代次数如表2所示(本刊黑白印刷,相关疑问请咨询作者)。
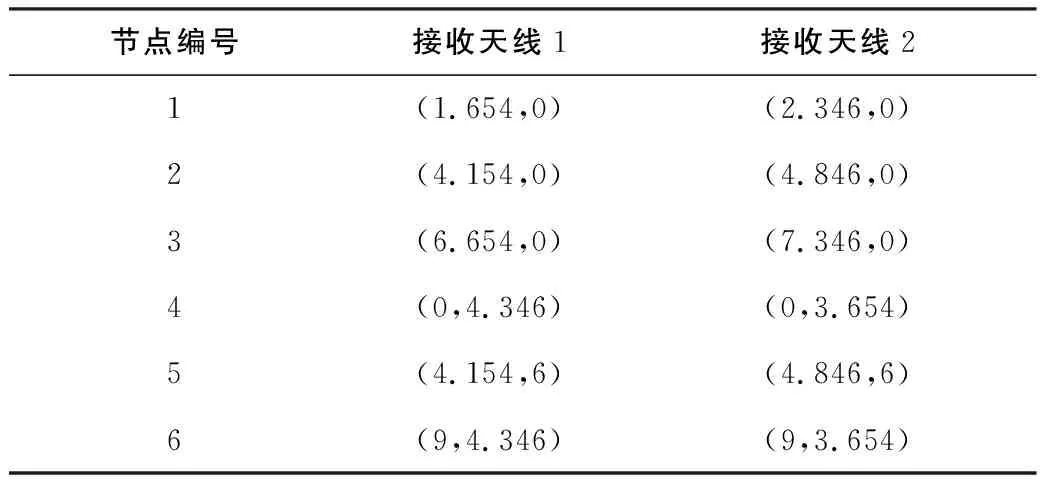
表1 传感器节点坐标 单位:m
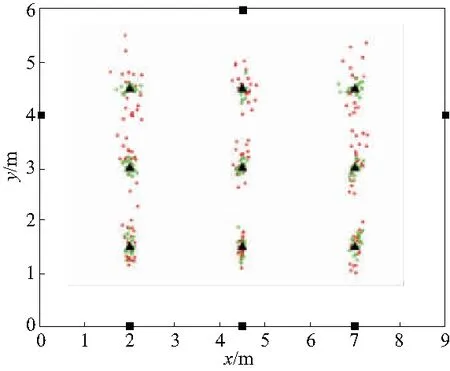
图6 MATLAB仿真图像
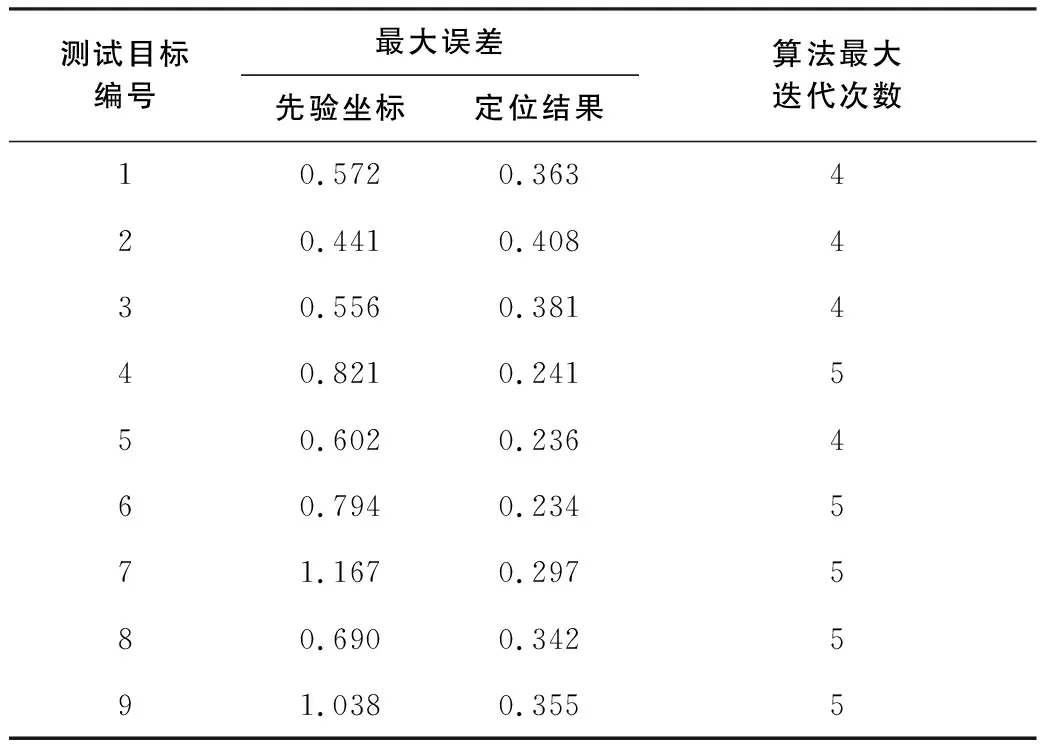
表2 MATLAB仿真结果 单位:m
根据仿真结果可得:
1)定位算法的仿真结果最大误差均<0.5m。由3个传感器节点协作获得先验坐标的最大误差超过1m,最大达到1.167m。因此可证明本算法的参数估计定位结果有着较高的可靠性。
2)定位算法保证收敛,最多只需要5次迭代就可以达到预先设置的1×10-5m的阈值,有着较低的时间复杂度,可以高效地完成位置解算任务。
5 定位实验结果分析
选择一个8.42m×9.7m的矩形区域进行室内定位实验。实验环境如图7所示。

图7 定位实验环境
定位实验区域节点以及相关设施摆放如图8所示。
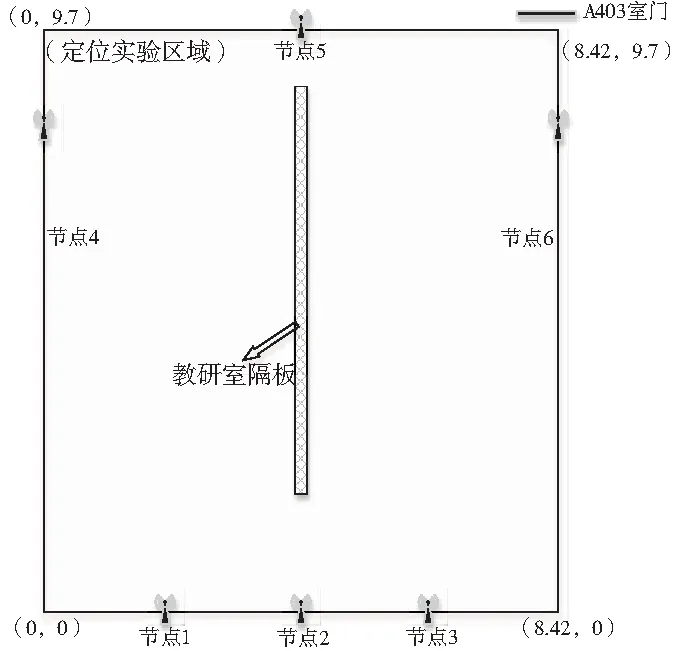
图8 定位实验节点布置
其中各个传感器节点及其两个接收天线在室内平面坐标系中的坐标如表3所示,定位实验结果如表4所示。
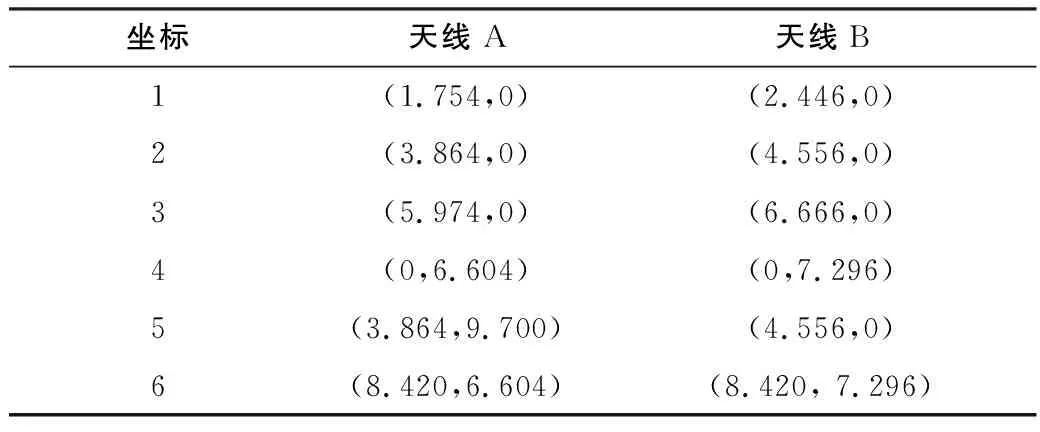
表3 定位实验接收天线坐标 单位:m
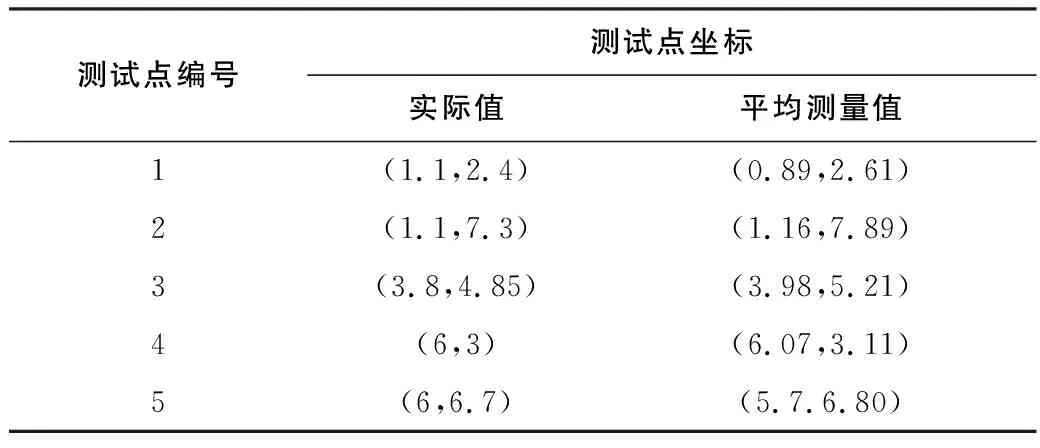
表4 定位实验结果 单位:m
由定位实验结果可得:
1)本文定位系统在80m2的定位区域内,受到室内木制隔板的遮挡,平均定位误差可以控制在0.6m以内,最大定位误差不超过1.6m。定位结果证明了本文定位方法的可行性。传统室内定位方法例如蓝牙、WiFi定位在非视距环境下的定位误差在3m左右,本文的室内定位系统与之相比在非视距环境下有着更好的定位精度。
2)对于本文的定位系统,由于室内环境多径干扰严重,当信号源靠近墙壁等障碍物时,载波信号受到较大干扰,影响相位差测量精度,例如测试点3与测试点4有着0.43m的定位精度差距。同样,接收天线附近的墙壁等也会很大程度影响载波相位差测量精度。
3)本文使用的泰勒级数展开最小二乘迭代算法适用于本文的基于载波相位差的室内定位系统,在保证收敛性的同时可以通过少于6次的最小二乘迭代算法完成参数估计。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2022年2期)2022-06-14
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
发明与创新·大科技(2018年2期)2018-03-17
家庭影院技术(2017年8期)2017-10-13
家庭影院技术(2017年9期)2017-09-26
移动通信(2017年11期)2017-06-20
电子制作(2016年1期)2016-11-07
