
新型小行星附着机构的落震仿真研究
2022-02-25 00:44冯羿飞李丹怡秦浩胡汝洁张延坤贾山
机械制造与自动化 2022年1期
冯羿飞,李丹怡,秦浩,胡汝洁,张延坤,贾山
(南京航空航天大学 航天学院,江苏 南京 211106)
0 引言
对小行星的探索可以帮助人们追溯星系起源、寻找地外资源,是人类迈向无垠深空的重要一步[1]。到目前为止,人类已经多次发射小行星探测器,取得了确定目标小天体精密轨道、物质组成、内部结构等一系列成果[2]。为了更深入了解小行星,需要对小行星表面样本进行分析,而要实现表面采样目的, 探测器就必须着陆到小行星表面[3]。然而,小行星的弱引力、表面环境不确定等因素为着陆任务带来了很大的困难。实际上,目前仅有欧空局发射的“菲莱”号使用缓冲装置登陆能够到小天体表面,但因没有重复着陆的能力,最终也导致其着陆失败[4]。可见,为了顺利完成星表的采样任务,需要让探测器克服小行星特殊的着陆环境,稳定地完成着陆。可以说,着陆缓冲过程关系整个任务的成败。也正因如此,对着陆附着机构的研究具有重要的意义,设计并制造能适应小行星表面环境的着陆缓冲装置将大大提高探测任务完成的成功率。本文将为一种针对长期附着方案提出的着陆附着机构建立虚拟样机模型,使用该模型模拟小行星着陆任务完成落震动力学仿真,并依据仿真结果评估这一附着机构的性能。
1 仿真环境及指标分析
小型天体的附着机构与月球、火星探测使用的着陆缓冲机构有所不同,这是由于小型天体星表环境往往具有引力微弱、形状不规则、表层特征不明等诸多特殊性[5-6]。其特殊性正是探测任务的难点所在,同时也是附着方案选择、附着机构设计应该克服的要点所在。
本文的仿真方案中,将星体表面的微重力环境作为最主要的环境因素,忽略一些难以模拟的次要影响因素。假定探测对象是一个半径为3 000m的最常见的C-型小行星,星体形状为规则球体且质量分布均匀。根据资料这类小行星密度约为1 300kg/m3[7],则根据二体模型,星表重力加速度g、最小发射速度vorbital及逃逸速度vescape计算公式为:
(1)
(2)
(3)
式中:G代表万有引力常数;ρ代表小行星的密度;r代表小行星的半径;V代表小行星的体积。
推算得到,重力加速度约为1.09×10-3m/s2,最小发射速度约为1.81 m/s,逃逸速度约为2.56 m/s,可以看到3个参数值都非常小。如果着陆后的横向残余速度大于最小发射速度,着陆器可能会进入环绕轨道;如果大于逃逸速度,着陆器甚至会摆脱小行星引力,飞离目标星体。这就要求缓冲机构对横向动能有较好的吸收能力。
对于一般的缓冲机构,在反推动力按压下足垫与星体表面的摩擦是主要吸收横向动能方式。本文的仿真中,足垫与地面之间的动摩擦系数设置为0.3,静摩擦系数设置为0.7。
此外,缓冲机构应发挥保护探测器内部仪器的功能,防止其受到过大冲击而损坏。为达到这一要求,一般认为落震过程中竖直方向和水平方向的最大过载响应均不得超过3g[8]。
2 附着方案分析
本文研究的附着机构是针对长期附着方案而提出的。相较于接触反弹方案和盘旋附着方案,本方案的优势在于降低了对导航和姿态控制系统的要求,并且由于长期固定于星体表面,故不需要设计特殊的采样机构,可以使用传统的钻探机构采集更深层的样本。同时,使用长期附着方案,采样完成后有足够的时间当场对样本进行分析,可以不用携带样本返回,能够省去星表再发射装置的成本,或是能够使用发射装置去重复探索更多星体。
此外,接触反弹方案和盘旋附着方案对缓冲装置的要求较低,甚至可以没有缓冲装置,但其附着速度必须被控制在很小的范围内。而长期附着方案允许附着速度达到1~2 m/s,相应的,这种方案需要行之有效的缓冲装置。
3 虚拟样机建模
3.1 附着系统整体结构
如图1所示,这种附着系统的着陆缓冲机构为三足式。每足安装有一个主缓冲器,主要吸收垂直方向的动能,另外每足通过球铰连接有两个副缓冲器,能够有效吸收水平方向的动能。副缓冲器通过展开锁定机构与主体部分相连,在着陆腿完全展开后该部分经过锁定形成桁架结构,有利于提高整个构型的稳定性。
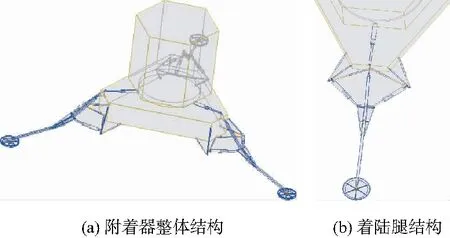
图1 小行星附着器结构图
3.2 缓冲装置原理
如图2所示,缓冲器由外筒、内筒以及如弹簧、蜂窝铝等用于吸能的缓冲结构组成。着陆时,附着器与小行星相撞产生的冲击时,经各部位的球铰传递给缓冲器,缓冲器内筒承受冲击后收缩做功。在这一过程中,视缓冲器种类不同可将动能转换为塑性变形能、内能等其他形式的能量,以此降低主体部分承受的冲击。

图2 缓冲器结构图
建立虚拟样机模型时,在内筒与外筒之间会添加摩擦系数和一个较大的预紧力。仿真中,利用内筒与外筒之间的摩擦模拟缓冲器的性能,这一部分的受力情况可以作为缓冲器选用的参考。
3.3 运动副设置
本文研究的是附着机构着陆过程中的动力学特性,而对着陆腿展开这一过程没有影响。为了最大程度简化模型,将着陆腿完全展开后锁定的部分用固定副连接,或者直接与其他部分连为一体,而对可以活动的、传递运动的连接,添加与之相对应的运动副。
运动副中除了缓冲器内外筒之间的滑动副需要预紧力,还有足垫与球铰之间的球副需要特殊处理。如果球副是理想光滑的话,落震中球垫会不受控制地转动。所以足垫与球铰之间需要添加摩擦系数和一定预紧力,以期足垫能够稳定活动。
完成全部运动副添加后,根据已有的小行星探测器参数,将主体部分质量设定为450kg。设置着陆腿主要部分材料为铝合金,每条着陆腿的质量约为6kg。最后,设置足垫与地面间的接触关系,调整接触深度、刚度、摩擦系数等参数,完成整个虚拟样机的建模。虚拟样机整机如图3所示。

图3 虚拟样机模型
4 落震仿真结果及分析
为简化问题,落震仿真是基于以下几点假设的:
1)模型各部件均为刚体,落震中形状无明显变化;
2)除了个别会影响仿真效果的约束,各运动副理想光滑;
3)地面具有较大刚度,不会发生明显下陷。
前文中已经确定了仿真环境参数,也完成了虚拟样机模型的建立。在本节中,将基于ADAMS的动力学求解器,对建好的模型进行落震仿真,输出着陆过程中附着器关键位置参数、受载情况、速度变化情况等参数,论证这种新型附着机构应用于实际小行星探测的可行性。
首先,为附着器赋予一个数值为0.5m/s的初速度,这一速度的纵向与横向分量分别为0.3m/s和0.4m/s。仿真得到着陆过程速度变化情况如图4所示。可以看出,在落地之后,附着器依然具有一个横向的残余速度,这一速度在4 s内被降到了5cm/s左右。这一数值优于一些传统的附着机构,由此可见,这一构型对横向动能有比较好的吸收能力。


图4 着陆过程速度变化情况
图5为着陆过程中附着器受到的加速度响应情况。可以看出,附着器受到的最大过载不到1.2g,远小于要求的3g,说明搭载的仪器设备是非常安全的,甚至可以考虑安装更精密的设备。
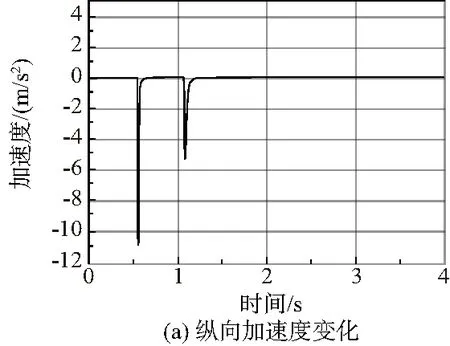
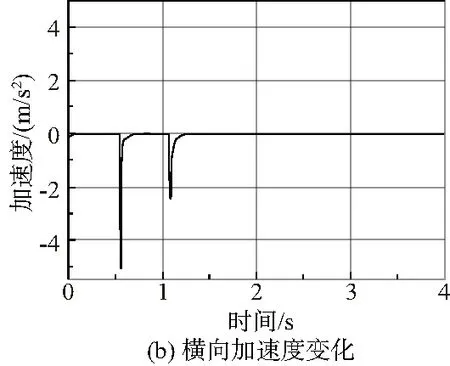
图5 着陆过程加速度变化情况
仿真中,附着器的着陆是一腿先着陆之后另外两腿分别着陆的,这也是在导航和姿控系统不够精确时最有可能发生的情况。如图6所示,分别为着陆过程中受力最大的主缓冲器和副缓冲器的受力情况。可以看出,主要承担吸收纵向冲击的主缓冲器受力远远比副缓冲器要大得多,峰值约为4 300N,副缓冲器受力的峰值约为20N。这一结果说明主缓冲器应尽量选取性能更好的类型,而副缓冲器的选择上可以尽量节约成本。
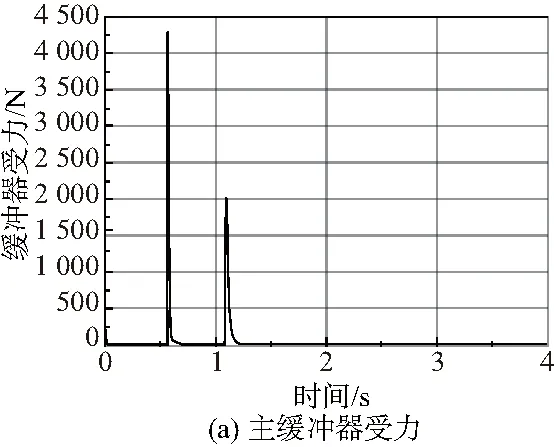
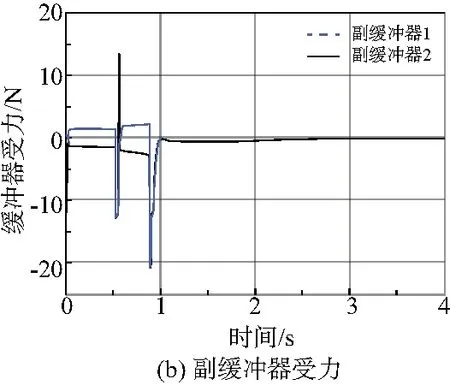
图6 着陆过程缓冲器受力情况
下一步,设置一个更大的初始速度,探究附着机构在这一不同工况下的表现。新的初始速度为1m/s,相较之前有一个更大的水平分量0.8m/s。
在这一工况下的初步仿真中,得到结果并不理想——附着器发生了明显的反弹,残余速度也没能得到很好的控制。于是,在上述初始条件的基础上,添加一个持续4s、60N的按压力,各环境参数保持不变。这种条件下,得到的仿真结果如图7-图8所示。可以看到,4s后的横向残余速度约为15cm/s,最大过载不超过2g,主缓冲器受力峰值达到9 000N左右,副缓冲器受力峰值约为20N。
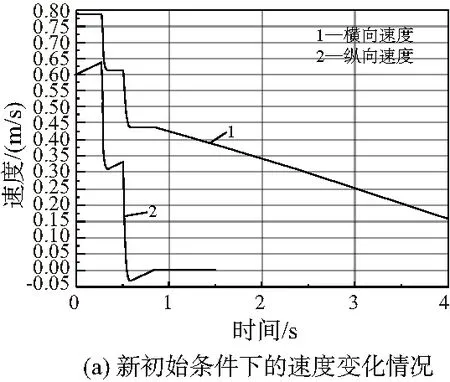
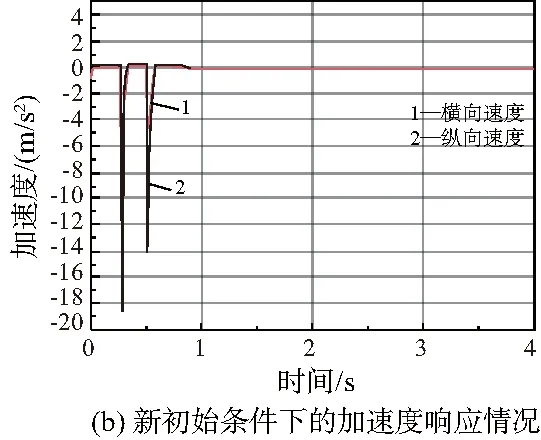
图7 新初始条件下的速度及加速度变化情况
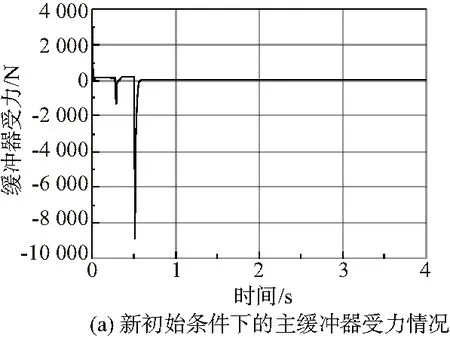
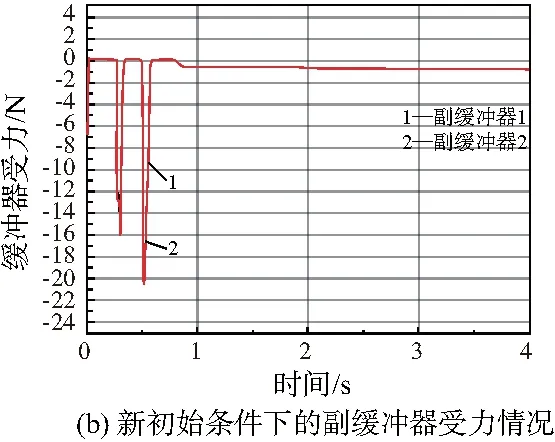
图8 新初始条件下的缓冲器受力情况
5 结语
针对一种新型的小行星附着机构建立了虚拟样机模型,在动力学仿真软件ADAMS中进行了落震仿真,得到的结果显示:这种构型具有优秀的稳定性,能够将着陆过载控制得非常小,并且具备良好的横向动能吸收能力,能有效降低着陆后的残余速度。同时,仿真中得到的关键位置力学参数对后续的着陆构型设计、缓冲装置选择也有一定的参考价值。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
轻兵器(2022年3期)2022-03-21
铁道车辆(2021年4期)2021-08-30
金山(2021年3期)2021-03-24
房地产导刊(2020年6期)2020-07-25
空间科学学报(2020年2期)2020-04-01
小学科学(2019年9期)2019-10-18
河南科技(2019年11期)2019-09-10
计算机与网络(2018年4期)2018-09-10
中国棉花(2017年10期)2017-11-04
