
差分驱动电路在HUMS系统中的应用设计及问题研究*
2022-02-24 03:37施天宇杨照坤林希宁
机电工程技术 2022年1期
施天宇,杨照坤,林希宁
(深圳技术大学中德智能制造学院,广东深圳 518118)
0 引言
HUMS 系统全称直升机健康状态与使用监测系统(Healthy and Usage Monitoring Systems)[1],主要用于监测机上三大动部件(旋翼系统、发动机、传动系统)及机体的振动,为地面系统给出部件的使用状态,实现对机上重要关键部件的损伤累积分析提供数据,为实现直升机使用监测、健康监测、故障诊断、有寿件寿命监控、故障定位等舰基和陆基的保障提供数据支持,为飞行安全保障及日常使用维护提供数据支持。HUMS 在国外已有将近40 年研究历史,1991 年,英国北海直升机公司研发安装了首套HUMS,并随后制定了各类HUMS 技术标准[2],我国HUMS系统研究发展时间较短,目前装备的机型种类和数量都十分有限,相关设计和飞行经验还十分欠缺[3]。HUMS系统配套多路振动传感器,监测多处部件,对于振动传感器输出的信号在HUMS系统中进行数据处理,进行超限阈值判定[4]。机上输出的振动信号为模拟信号,在进行数据处理前需通过ADC芯片进行模数转换,而机上信号带有偏置信号以及各种干扰波形,因此需要通过前端调理电路对传感器输出的振动信号进行调理,而差分驱动电路则是调理电路的最后一步。本文主要提出应用在ADS1278模数转换芯片的前端差分驱动电路设计,并通过实际硬件设计调试过程中遇到的多通道信号输出误差问题,进行弱交直流信号输入仿真,对误差问题进行分析研究。
1 硬件设计
1.1 调理电路的设计原理
振动信号调理电路用于实现机上多路振动信号的前端调理,原理框图如图1所示,机上有多个振动监测点,每一个机上振动传感器输出的信号都需经过单独调理电路的处理,具体需经过雷击保护、共模滤波、电流源驱动后,再经过高通滤波、模拟开关、跟随器、差分驱动、低通滤波器,最后输入到AD 采样控制器,进行抗混叠和重采样,然后进入数据管理模块,写入三端口RAM。三端口RAM 分为两个RAM 块,组成乒乓RAM,每秒产生多个中断送给DSP和主控模块。
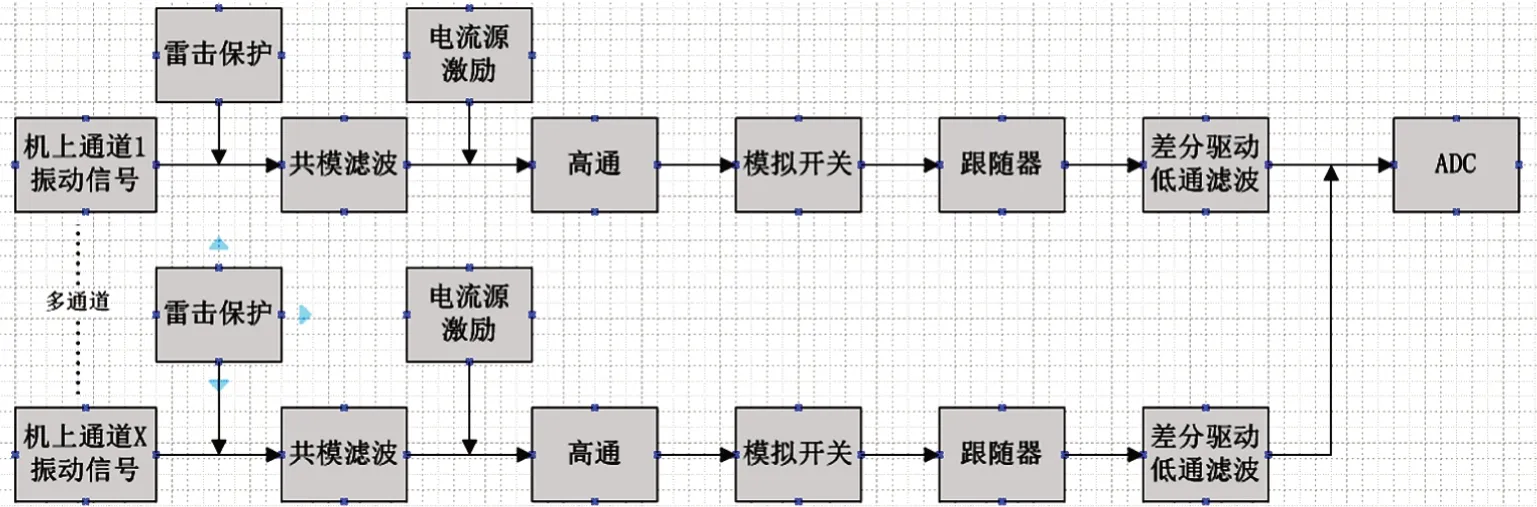
图1 多通道振动信号调理电路原理框图
1.2 差分驱动电路的设计原理
ADC 芯片选用TI 的ADS1278,ADS1278 是8 路同步采样24 位模数转换器[5],通过MODE0 脚和MODE1 输入低电平选择高速运行模式,可以实现62 kHz 带宽、-108 dB 总谐波失真、128 kSPS 数据速率和106 dB信噪比等性能,每个ADS1278 有8 路振动信号输入,其所用的时钟信号CLK 通过拥有极低的输出时钟偏斜的零延迟时钟驱动器SM2305 分成4 路时钟信号CLK1~CLK4,分别提供给4 个ADS1278,其余SCLK 和SYNC 等时钟信号均由系统中处理模块直接提供,另外ADS1278 的2.048 V 参考电压由选用Linear 的高精度(±0.025%)、低噪声(0.25 ppm)和低温飘(2 ppm/℃)的参考电压芯片LT6655BHSMS8-2.048提供。
根据ADS1278 的设计需求,及前端调理电路的设计,在对前端驱动运放的选型及其周围电路设计需实现以下4个功能。
(1)实现振动信号单端转差分:由于振动信号调理电路在进入高通滤波前将信号由差分转单端,而ADS1278 对输入的模拟信号要求差分信号,所以在前端电路采用差分电路实现振动信号单端转差分。
(2)实现振动振动信号衰减,符合后续ADC 输入信号的要求:由于机上传感器的输出的振动信号最大为±5 V 的正弦信号,而ADS1278 对输入的模拟信号要求-0.3~AVDD+0.3,同时由于ADS1278 对差分驱动电路有输出Vcom 偏置电压即AVDD/2,AVDD 为ADC 芯片的模拟供电电压即5 V,所以振动信号在进入ADC 芯片前需调制成-0.3-AVDD/2~0.3+AVDD/2,即±2.8 V以内的正弦信号,所以此处设计选用3.24K/0.1%和1K/0.1%的电阻对信号进行衰减,衰减倍数为R11/R13,衰减后信号最大范围为±1.543 2 V,符合ADC 信号输入要求,同时可以通过这两个电阻值来控制AD芯片的量程。
(3)提升ADC模拟信号输入驱动能力,实现ADC的高性能工作,减小信号误差。
(4)对振动信号进行低通滤波。
所以前端驱动运放选用Linear 的高精度、低功耗、轨到轨输入输出的差分运放LTC6362[6]。
PCB 设计图如图2所示,ADC 前端差分驱动电路设计原理如图3所示。
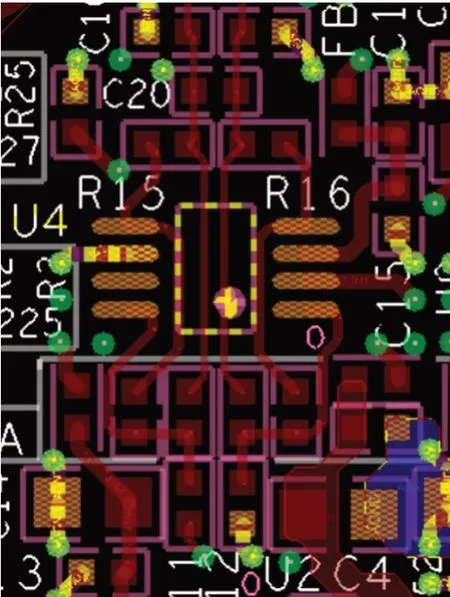
图2 ADC前端差分驱动电路PCB设计
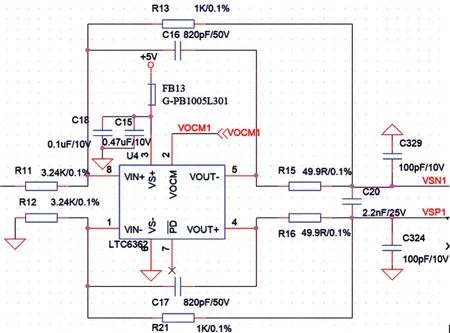
图3 ADC前端差分驱动电路原理设计
2 弱输入信号问题研究
根据直升机安全保障需求,HUMS 系统需要设计多通道对信号进行调理,同时由于板卡尺寸设计要求,各通道电路在PCB 板卡上间距很近,必然会存在信号串扰。机上选型的振动传感器输出均为带偏置电压的不稳定交流信号,以PCB通用的三轴加速度传感器354C03为例,其输出偏置电压10~14.5 V,灵敏度100 mV/g,振动测量范围为±50 g,则传感器输出的振动信号经过高通隔直后,最大的信号范围为±5 V。另外机上实时的振动信号是不稳定信号,除正常振动和飞机发生故障振动,振动传感器监测的位置会产生较大幅值或较高频率的振动信号,同时也经常会输出大量的微弱信号,所以电路需对微弱信号[7]进行验证,确保当弱信号进入电路时也能进行正常的调理,并给到后端处理模块去采集。因此在电路设计过程中,除用正常的正弦交流信号(±5 V)进行测试,另外需要对调理电路进行交直流弱信号的测试。
2.1 弱直流信号测试
尝试在多个通道的调理电路中隔直电容后端输入50 mV 直流信号,通道12 中差分驱动电路电容C20 两端输出信号为19.297 5 mV,正常50 mV 直流信号经3.24 倍衰减后,输出信号应为15.432 mV 左右,信号偏移4 mV左右,对信号精度影响很大,其余通道出现较小偏移,属于正常误差范畴,如表1所示。
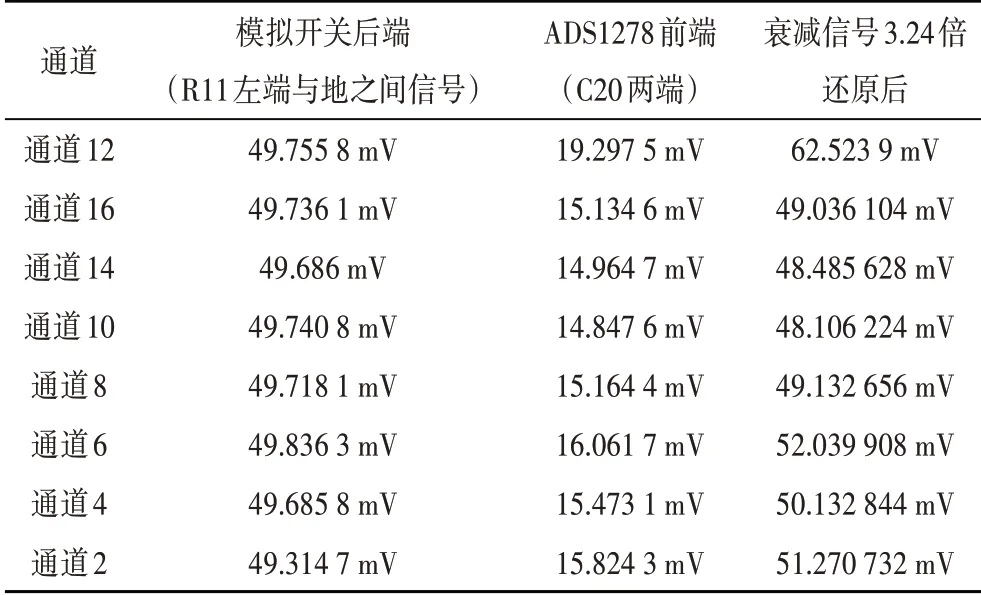
表1 50 mV DC输入信号对8个通道输出影响
2.2 弱交流信号测试
在上述通道的调理电路中隔直电容后端两端输入改为100 Hz、50 mV Vpp 正弦交流信号,有效值为17.677 67 mV,无论信号大小,对经过差分驱动电路后输出的信号精度影响都很小,如表2所示。
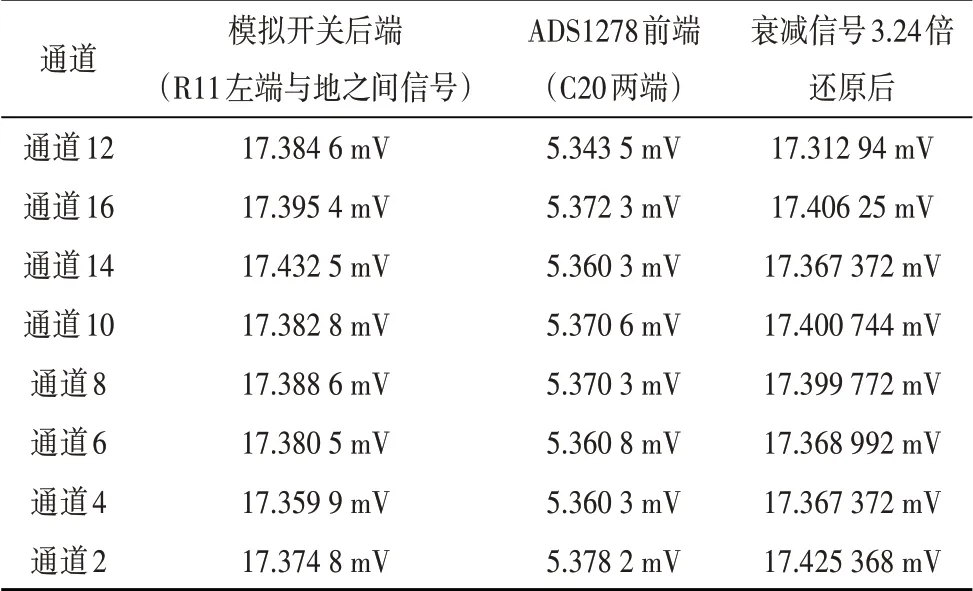
表2 100 Hz、50 mV AC输入信号对8个通道输出影响
2.3 问题通道直流信号放大测试
另外在出现问题的通道中,使调理电路中隔直电容后端两端输入的直流信号变大,输出的信号偏移也逐渐变小,且对信号精度影响也渐小,如表3所示。
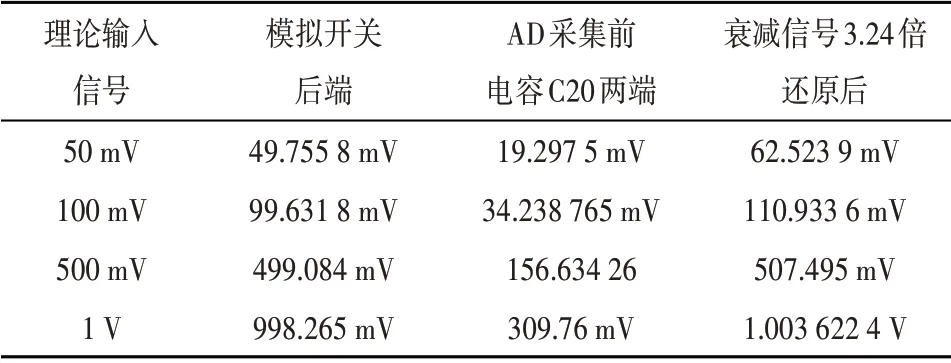
表3 直流输入渐大对输出影响
2.4 问题分析及结论
由于LTC6362本身存在失调电压0.35 mV,这也是其他通道为什么在50 mVDC 输入时,输出也有一定的偏置,用Multisim 的AD8138做一个相似差分驱动电路的仿真,该芯片本身有一个2 mV左右的输入失调电压,如图4所示,输入为理论的0 V,输出依然有2.551 mV。
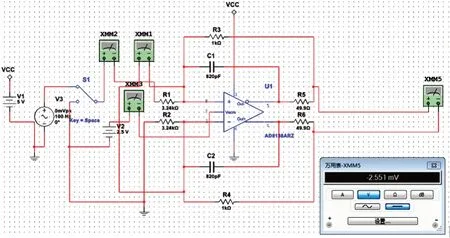
图4 0 V输入
当输入改为50 mV DC 时,输出为17.974 mV,比起理论的15.432 mV偏移了2.5 mV左右,如图5所示。
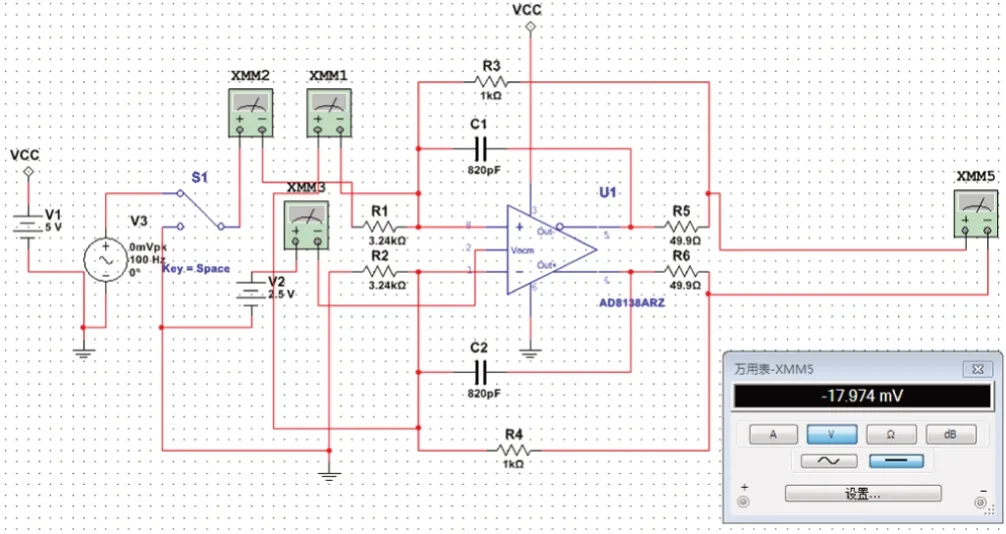
图5 50 mV DC输入
LTC6362 的失调电压最大也仅为200 μV,所以其正常时输出的直流偏置也较小,但是实际调理板的通道12偏置误差达到12.768 1 mV。
在实验中,将通道12中差分电路的两个前端电阻R11和R12(3.24 K/0.1%)拆下,实际测量其阻值,发现R11实际阻值为3.270 28 kΩ,R12 的阻值为3.238 49 kΩ,R12 的阻值符合0.1%的精度,R11 的阻值精度已经为1%。再用AD8138 仿真,当输入为0 V 时,电阻应用当前实际阻值,发现输出就有8.215 mV的偏移,如图6所示。
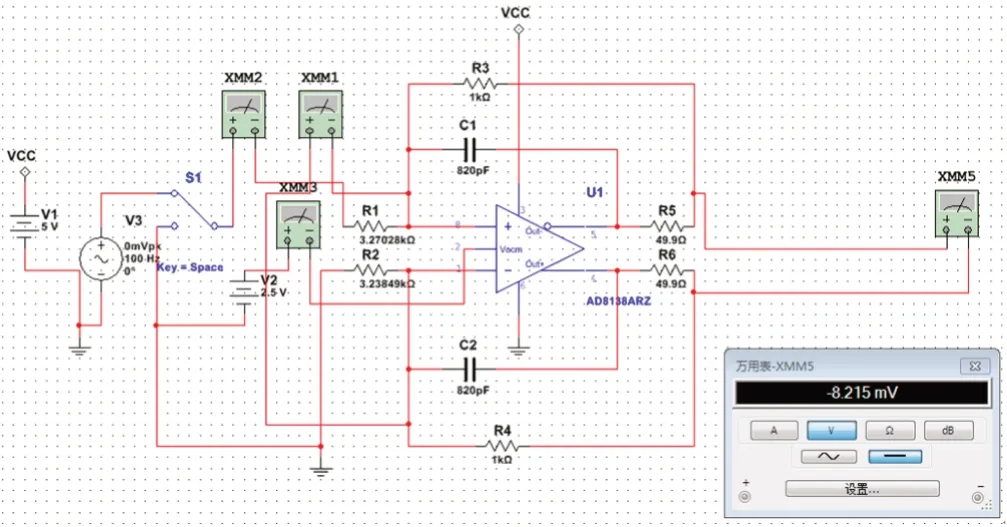
图6 0 V输入(实际电阻阻值)
将输入改为50 mV DC 时,输出就变为23.514 mV,如图7所示。

图7 50 mV DC输入(实际电阻阻值)
该仿真实验说明电阻的细微变化对也会弱直流信号输入时的输出有很大影响。于是在实际板电路上将此两个电阻更换新的阻值精度正常的电阻,再测量通道12的数据,输出为15.135 7 mV,3.24 倍还原后为49.039 668 mV,与其他通道一致,输出属于正常的偏置。
再通过仿真,将输入信号设置为50 mV VPP的交流,比较正常电阻和阻值偏移后的电阻的输出情况,发现对于小信号交流输入时输出的影响很微弱,如图8和图9所示,这也解释了之前交流电压对输出信号精度影响较小的现象。
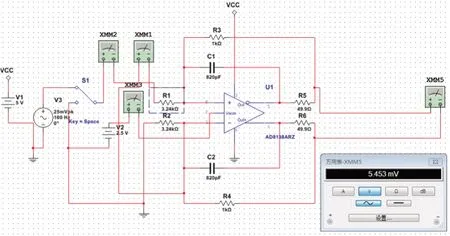
图8 50 mV VPP(理论电阻阻值)
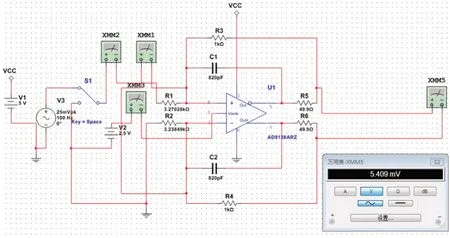
图9 50 mV Vpp(实际电阻阻值)
另外直流信号越大的话,失调电压本身就是零点几毫伏或者几毫伏级别的,这种级别的偏置对大信号的精度影响更小。
3 结束语
差分驱动电路在HUMS 系统做前端调理的硬件电路中起着关键作用,它能实现单端转差分、信号衰减、提高信号输入驱动能力和低通滤波等功能,为将机上传感器输出的振动信号做好调制给后端做数据处理。同时在实际硬件设计及HUMS 系统实验中发现,由于系统同时处理多路振动信号,所以任意一路差分驱动电路出现故障,就会导致机上振动误报警且提供给地面的数据不准确,无法为飞行安全提供保障,本文对实验中出现的弱交直流信号输入时的单一故障通道进行信号误差分析,验证电阻精度准确的重要性以及弱交直流信号输入时电路对输出信号的影响。在最终实际产品的验证下,实现了该差分驱动电路在HUMS 系统上的应用,证明了本文提出的电路设计方案的可行性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
山西电子技术(2022年2期)2022-04-22
中学生数理化·教与学(2018年10期)2018-12-06
电子制作(2017年13期)2017-12-15
北京航空航天大学学报(2016年6期)2016-11-16
物理教学探讨(2009年4期)2009-05-25
中学生数理化·高二版(2008年4期)2008-11-12
