基于稳定度指标的分布式驱动车辆转向稳定性控制研究*
2022-02-24 16:20张树培张生张玮朱建旭
汽车技术 2022年2期
张树培 张生 张玮 朱建旭
(江苏大学,镇江 212013)
主题词:稳定性控制 分布式驱动 稳定度指标 相平面 控制分配
1 前言
在车辆主动安全控制领域,分布式驱动电动汽车因其车轮可独立驱动∕制动,且其转矩在一定范围内可分配的特殊性能,具备比传统车辆和集中式电动汽车更加可靠、协调和灵活的优势。

2 系统建模
2.1 整车7自由度模型
在整车建模中,针对车辆的转向稳定性,考虑的自由度包括车辆的纵向运动、侧向运动、横摆运动以及4个车轮的转动,故作如下假设:车辆行驶的路面为平坦路面,忽略车轮的垂向运动;忽略传动轴间的扭振和摆振;简化悬架系统,不考虑车辆的侧倾运动和俯仰运动;车辆前、后轮距相等。建立的整车7自由度模型如图1所示。

图1 整车7自由度模型
车辆纵向运动微分方程为:

车辆侧向运动微分方程为:

车辆横摆运动微分方程为:
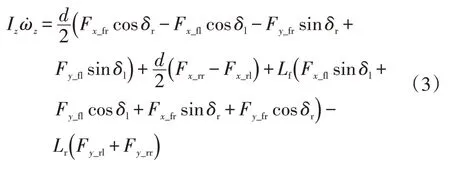
式中,为整车质量;v、v分别为车辆纵向和侧向速度;ω为横摆角速度;F、F分别为各车轮的纵向力和侧向力,=fl,fr,rl,rr分别表示左前轮、右前轮、左后轮、右后轮;、分别为左、右侧车轮转角;I为车辆绕轴的转动惯量;为轮距;、分别为质心到前、后轴的距离。
4个车轮的旋转方程为:


2.2 轮毂电机模型
整车使用轮毂电机进行驱动,仿真模型采用电机特性曲线确定电机输出:

式中,∈[-1,1]为电机的转矩系数,>0时电机输出驱动转矩,<0 时电机输出制动转矩;n(=fl,fr,rl,rr)为各轮毂电机的输出转速;为电机输出功率。
2.3 轮胎模型
车辆在紧急或危险的工况下转向时,轮胎受力处于非线性状态。因此,本文采用经典的可以描述非线性轮胎力的Pacejka 魔术公式模型。魔术公式用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式即可通过侧偏角或者滑移率完整地表达轮胎的纵向力F、侧向力F、回正力矩M以及纵向力、侧向力的联合作用工况。魔术公式一般的表达式为:

式中,表示侧向力、纵向力或回正力矩;表示侧偏角或滑移率;为峰值因子;为形状因子;为刚度因子;为曲率因子。
2.4 2自由度模型
7 自由度模型虽然能很好地表征车辆的动力学关系,但是对于车辆转向行驶稳定性的表征能力较差。因此,建立如图2 所示的二自由度车辆模型,以表征前轮转角输入、横摆角速度以及质心侧偏角的线性关系。二自由度模型的主要作用是求解稳态下车辆的理想横摆角速度和质心侧偏角,以及求解表征车辆稳定性的相平面轨迹图。
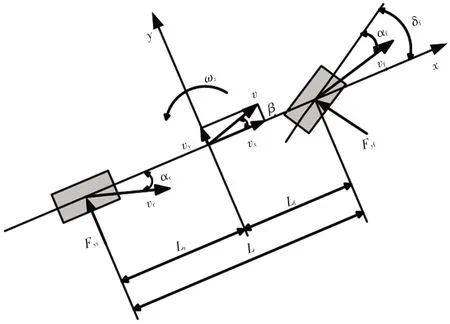
图2 2自由度车辆模型
车辆的侧向运动为:

车辆的横摆运动为:

式中,F、F分别为前、后车轮所受侧向力;为前轮转角。
3 控制系统设计
为完成分布式驱动电动车辆的稳定性控制,通过对车身施加附加横摆力矩对横摆角速度或质心侧偏角进行控制。基于滑模控制理论进行上层附加横摆力矩的设计,同时基于相平面理论设计稳定度进行失稳判断与控制比例分配。下层控制器将附加转矩分配到各车轮,通过轮毂电机加以控制。
控制系统框架如图3所示,其中为转向盘转角输入,为路面附着系数。稳定性判定模块基于横摆角速度门限值和设计的稳定度指标判定车辆是否稳定,理想状态模型基于二自由度模型得到稳态下的期望质心侧偏角和期望横摆角速度。在车辆失稳时,由实际状态参数和期望状态参数得到质心侧偏角误差e和横摆角速度误差e。ΔM和ΔM为附加横摆力矩和附加横摆力矩,二者加权得到加权附加横摆力矩Δ,T为分配到各轮的转矩。
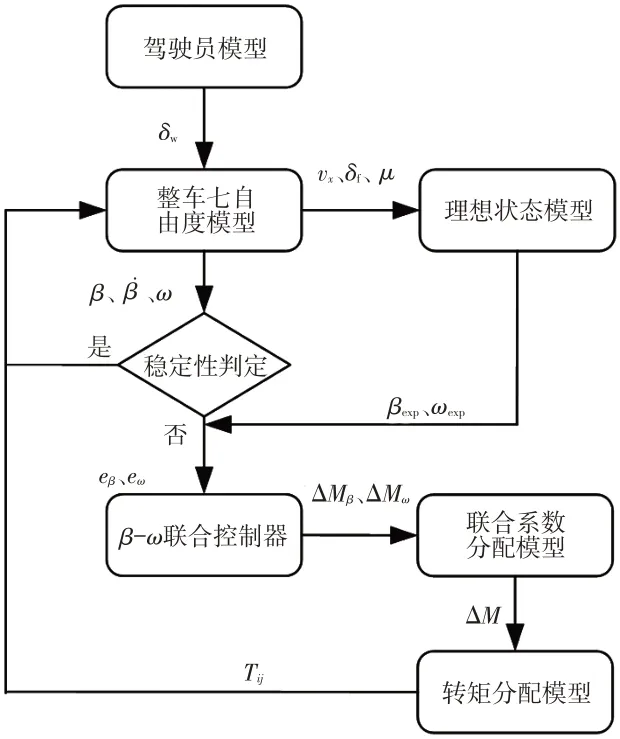
图3 控制系统框架
3.1 控制系统期望值模型
式(7)、式(8)经过推导可以改写成微分运动方程的形式:
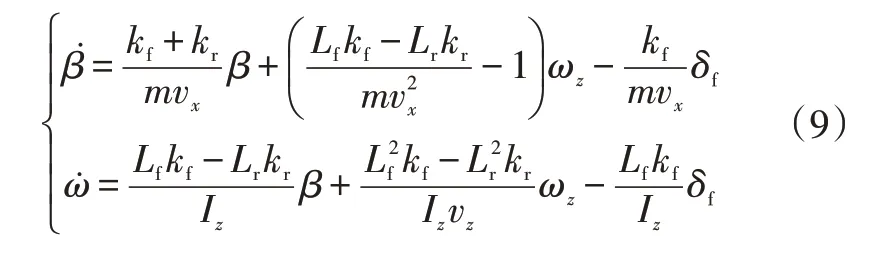
式中,、分别为前、后轴侧偏刚度。
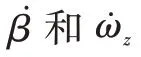
式中,为车辆的稳定性因数。
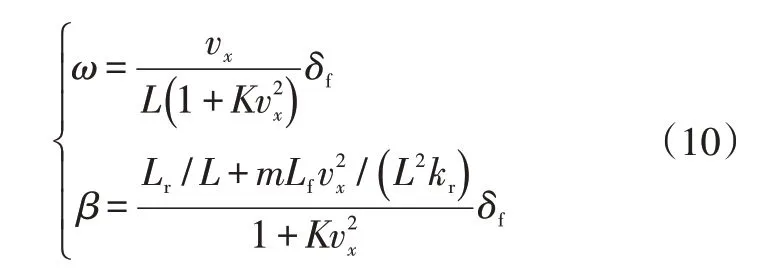
车辆在实际行驶过程中受到路面附着条件的限制,期望的状态参数存在最大值:
式中,=9.8 m∕s为重力加速度;为轴距。
综上,得到控制系统的期望值为:
3.2 横摆角速度和质心侧偏角滑模控制器设计
基于滑模控制理论,利用前文设计的期望参数值以及车辆实际参数值可分别设计横摆角速度控制器和质心侧偏角控制器。为表示方便,将式(9)等号右侧的式子分别记为和,在式(9)的基础上增加附加横摆力矩:
3.2.1 横摆角速度控制器设计
从控制理论上来说,控制的目的是跟踪误差尽可能小。定义横摆角速度的跟踪误差为:

进行滑模控制的滑模面设计为:

式中,c>0为横摆角速度误差及其变化率之间的权重系数。
为减弱抖振现象对滑模控制器的影响,趋近律选取等速趋近律,其运算量较小且具有较好的实时性与鲁棒性:

式中,K为该趋近律的常数。
将式(13)、式(14)和式(16)带入式(15)中,可得横摆角速度控制器的附加横摆力矩为:

3.2.2 质心侧偏角控制器设计
考虑到激烈工况下质心侧偏角的偏移,设计质心侧偏角控制器,定义质心侧偏角跟踪误差为:

滑模面设计为:

式中,c>0为质心侧偏角误差及其变化率之间的权重系数。
趋近律同样选择等速趋近律:

式中,K为该趋近律的常数。
将式(13)、式(18)和式(20)代入式(19),得到质心侧偏角控制器作用下的附加横摆力矩:

3.3 基于相平面法的车辆失稳判定及控制器比例分配
式(22)所示的二阶自治系统是实现相平面的基础:

由式(22)可得相图轨迹上每一点的斜率:

式中,、分别为相图的横、纵坐标。
式(23)中,两方程不同时等于0 时,给定初始状态值((0),(0)),对于任意时间(0),状态方程组上的解()=((),())是一条始于初始点的相轨迹。
在时间连续系统中,初始值在局部范围内,使相轨迹满足:

此时系统的总能量衰减,系统处于渐进稳定状态。若外界不产生干预,系统动量逐渐缩减为零,系统静止,收敛的状态点称为平衡点。相平面图中,稳定区域的相轨迹都会收敛到平衡点,不稳定的相轨迹呈发散状态。

将式(7)和式(8)表达成上述二阶自治系统:


表1 3个变量的取值范围和步长
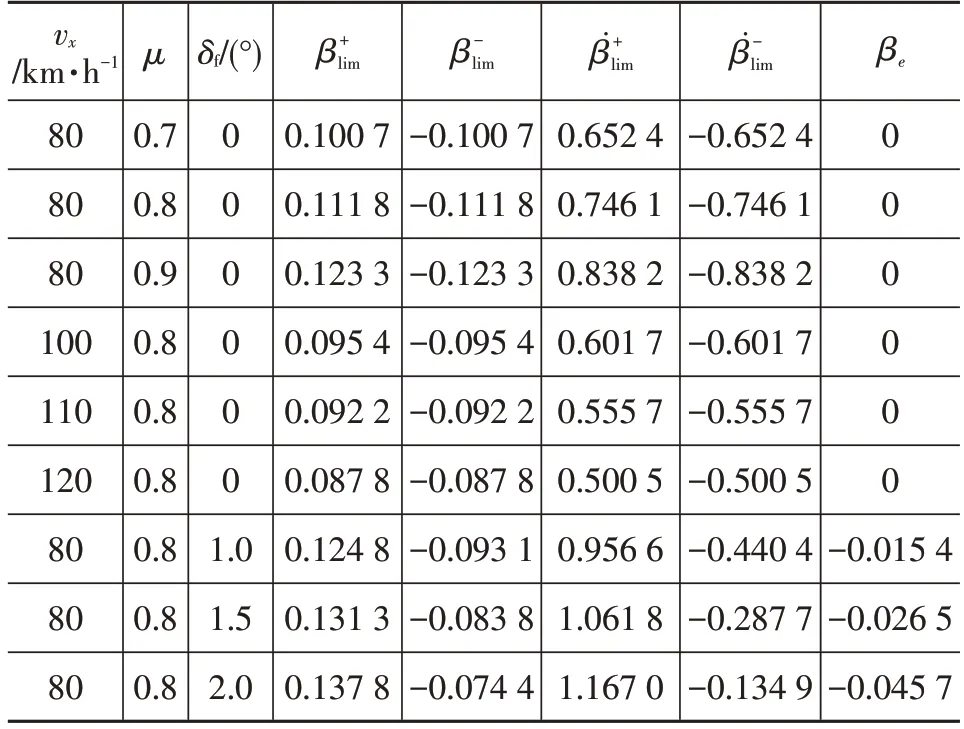
表2 部分数据库参数值

图4 vx=60 km∕h、μ=0.8、δf=0工况下的五参数菱形相平面


根据车辆的稳定性理论,质心侧偏角较小时,车辆的稳定性主要取决于横摆角速度。借鉴文献[21]中的结果,横摆角速度偏差的失稳临界值如表3所示。根据Method理论,质心侧偏角较大时,横摆角速度无法有效表征车辆的稳定性,此时质心侧偏角对车辆稳定性的影响占主体地位。因此,根据图5进行汽车失稳判断。
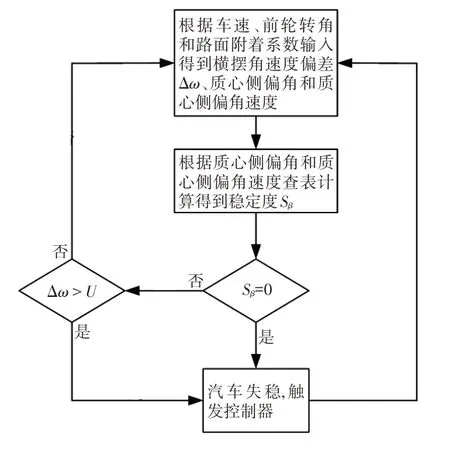
图5 失稳判断流程
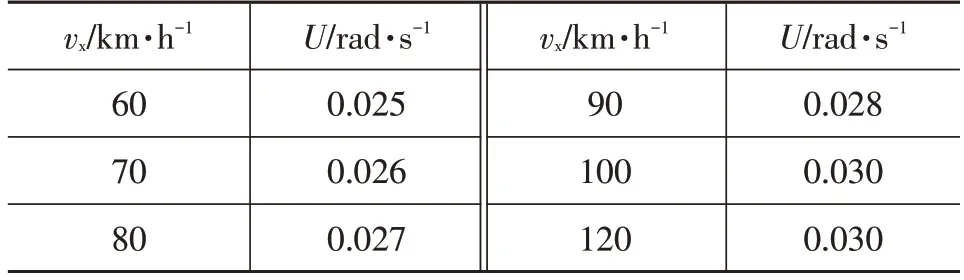
表3 横摆角速度偏差失稳临界值
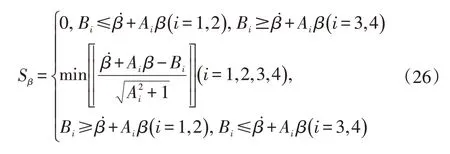
在进行稳定性控制时,质心侧偏角较大的情况下,应该增加质心侧偏角控制器的权重,受纵向速度、路面附着系数和前轮转角影响的稳定度可以有效表征这种情况:在菱形边界附近,即稳定度较小时,一种情况是质心侧偏角较大,此时质心侧偏角控制器权重应较大;另一种情况是质心侧偏角较小,但是质心侧偏角速度很大,车辆即将进入质心侧偏角较大状态,此时质心侧偏角控制器权重也应较大。因此,可以利用稳定度合理分配控制器权重,代入式(27)得到加权横摆力矩Δ:
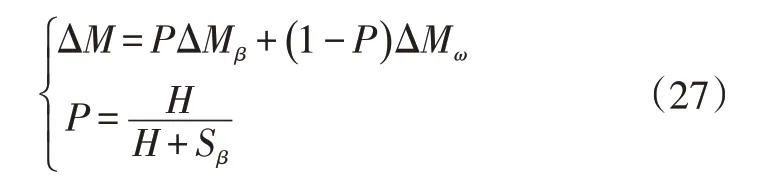
式中,为相图上平衡点到车辆状态点的距离。
3.4 下层转矩分配模型设计
上层的联合控制器根据控制目标输出相应的附加横摆力矩,通过转矩分配模型分配到各轮毂电机上以达到稳定性控制的目的。分配策略为:当过小时,车辆表现为不足转向,此时减小内侧车轮驱动力,必要时可使其变为制动力,并增大外侧车轮驱动力;当过大时车辆表现为过多转向,此时减小外侧车轮驱动力,必要时可使其变为制动力,并增大内侧车轮驱动力。考虑到车辆的垂向载荷在实际转向过程中会出现转移,各车轮受到的垂向载荷不同:

式中,F(=fl,fr,rl,rr)为各轮受到的垂向载荷;为车辆质心高度;a为车辆的侧向加速度。
车轮最大附着力与路面附着系数和垂向载荷有关。为了防止车轮分配过多转矩出现打滑现象,采用动态载荷分配的方式进行设计,即按照车轮的垂向载荷动态变化进行附加横摆力矩的分配:
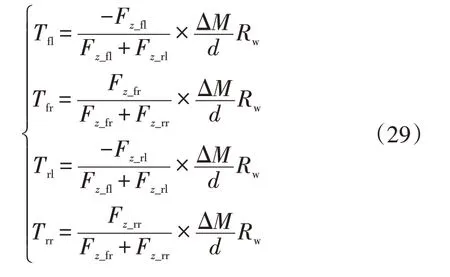
其中,各轮分配的转矩应不超过电机能提供的最大限值,即T≤T。
4 仿真分析
为验证控制器模型分配比例的合理性以及控制效果的有效性,在MATLAB∕Simulink 中搭建驾驶员模型、整车模型和控制器模型,进行车辆转向仿真。车辆参数如表4所示。
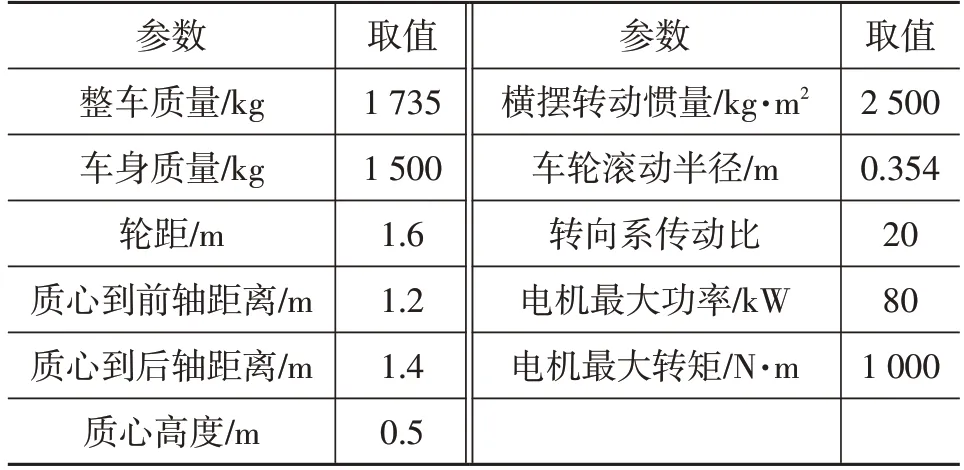
表4 整车参数
4.1 控制比例分配合理性仿真
如图6所示,转向盘转角输入为正弦运动,最大值分别为0.5 rad、1.0 rad、2.0 rad。仿真工况参数如表5所示。

图6 转向盘转角输入
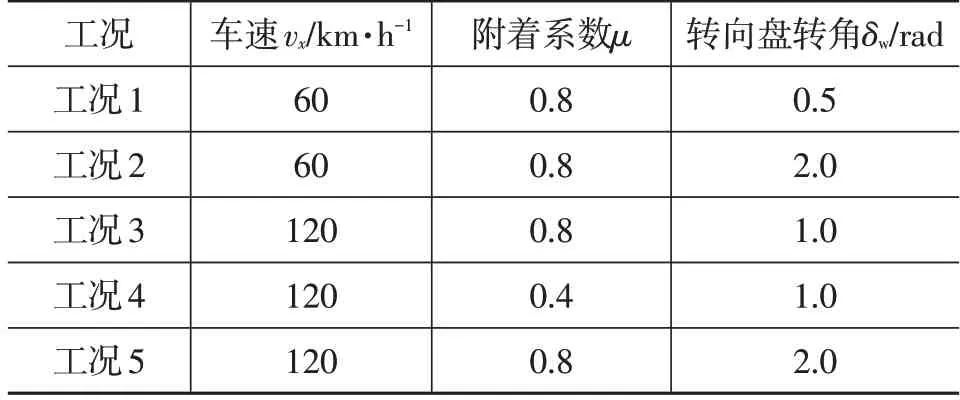
表5 仿真工况参数
如图7和图8所示,车辆在工况1有、无控制器下的横摆角速度与质心侧偏角误差相同且较小,说明车辆行驶状况良好,没有触发控制器。图9所示为其余工况下的控制比例分配曲线。在工况2 下,的最大值约为0.19,该工况下以横摆角速度失稳为主,控制器控制比重较大;工况3 下,的最大值约为0.70,该工况下质心侧偏角较大,控制器控制比重较大;工况4下,的最大值约为0.77,由于路面情况较工况3差,导致控制器的控制比重进一步增大;工况5是最激烈的工况,的最大值为1且维持了一段时间,说明该工况下有一段时间稳定度计算结果为0,在此时间段内完全由控制器作用。
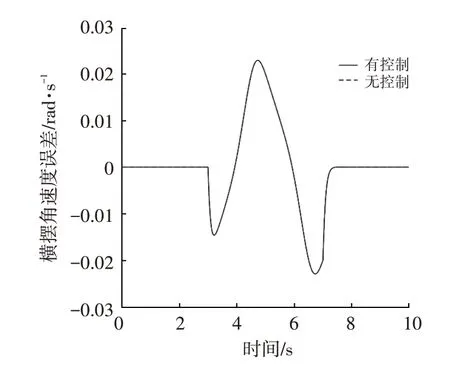
图7 工况1下有、无控制器的横摆角速度误差
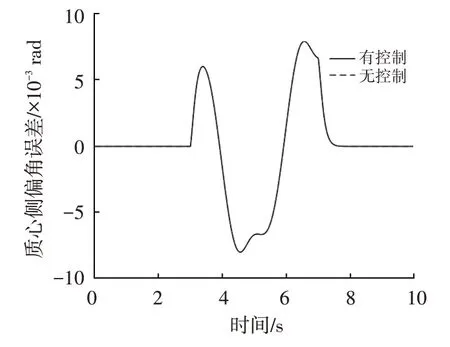
图8 工况1下有、无控制器的质心侧偏角误差
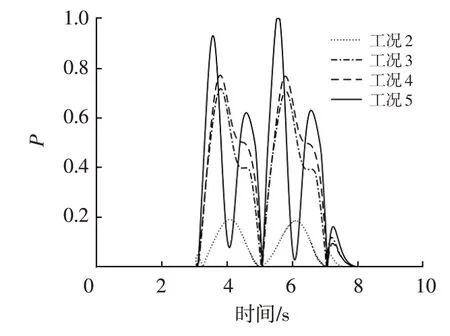
图9 各工况下的控制比例
4种工况的仿真结果表明,本文设计的控制比例分配模型可以根据工况合理分配控制比例。
4.2 有效性仿真
有效性的仿真在工况2 和工况5 下进行,包括车辆在无控制器、控制器、控制器和联合控制作用下的下横摆角速度误差和质心侧偏角误差的比较,以及联合控制下的转矩分配情况分析。
图10 和图11 所示为工况2 下4 种情况的横摆角速度和质心侧偏角误差。其中,联合控制器的控制效果最好,控制器与控制器控制效果相当。将控制器降低误差峰值的能力定义为控制效能,误差峰值控制到0时定义控制效能为100%。图10 和图11 中联合控制器比单个控制器的控制效能均相应有所提高。图12所示为联合控制器作用下的转矩分配情况,可以看出控制器采取了同侧双车轮驱∕制动的控制策略,同时根据载荷变化情况分配转矩,控制的有效性得到了验证。
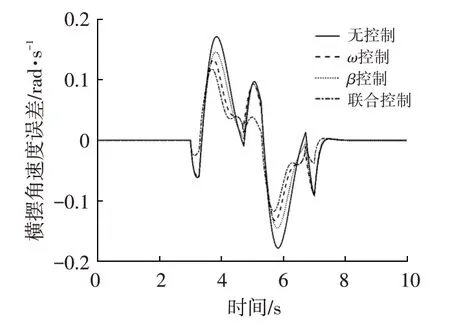
图10 工况2下的4种情况横摆角速度误差
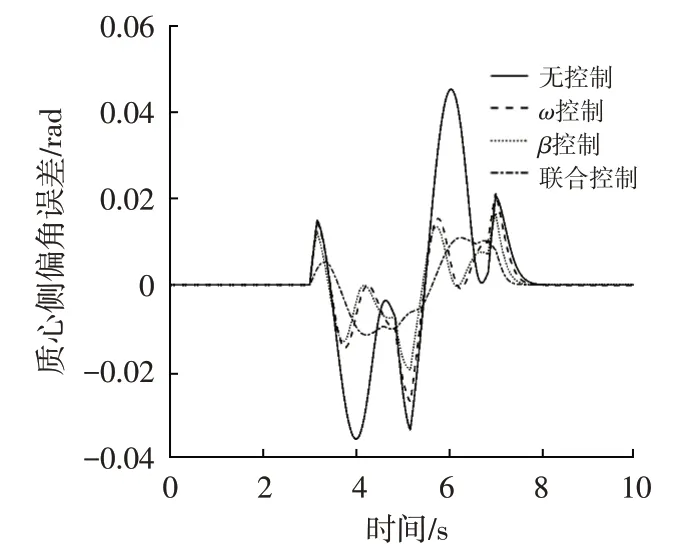
图11 工况2下的4种情况质心侧偏角误差

图12 工况2下联合控制器的转矩分配情况
图13 和图14 所示为工况5 下4 种情况的横摆角速度和质心侧偏角误差。其中,联合控制器的控制效果最好。由于车辆处于高速大转角的激烈工况,以失稳为主,控制器的控制效能较好,控制器作用效果有限。图15 所示为该联合控制器作用下的转矩分配情况,与工况2 相比较,大转矩的作用时间更长,可见在激烈工况下联合控制器也是有效的。
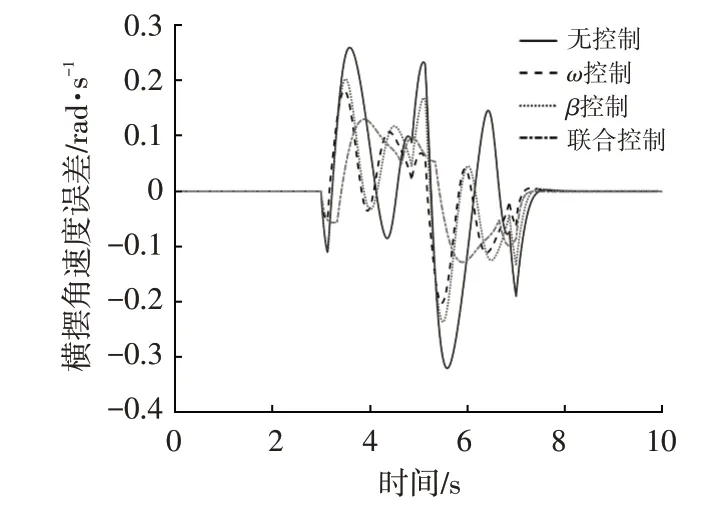
图13 工况5下的4种情况横摆角速度误差
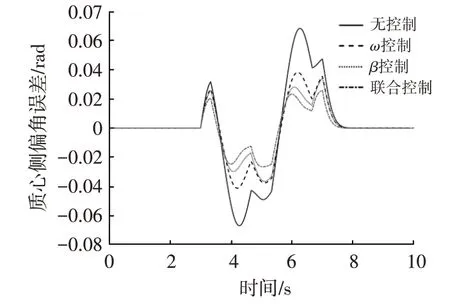
图14 工况5下的4种情况质心侧偏角误差
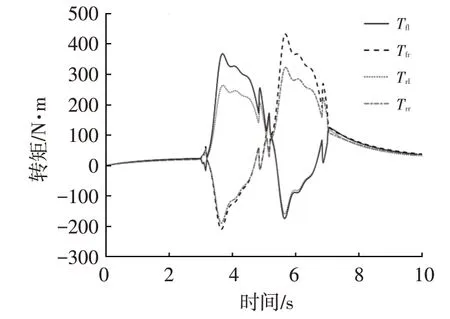
图15 工况5下联合控制器的转矩分配情况
5 结束语
本文提出了一种基于稳定度指标的分布式驱动车辆转向稳定性控制方法,经过理论分析、模型设计和仿真验证,得到如下结论:
a.基于稳定度指标的分布式驱动车辆转向稳定性控制系统可以根据实际工况判断车辆的稳定性,并合理分配控制器和控制器的控制比例。
b.联合控制器的控制效能较单个控制器更好,在较缓和以及激烈的工况下都能有效追踪理想参数。转矩分配模块也可以根据载荷情况合理分配转矩。设计的控制器整体可以达到转向稳定性控制的目的,且具有较好的鲁棒性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年10期)2022-06-17
飞控与探测(2022年1期)2022-04-02
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
科技创新与应用(2020年15期)2020-05-21
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
电机与控制学报(2018年9期)2018-05-14