
自适应事件触发下网络控制系统鲁棒容错控制
2022-02-23 05:38:12田亦飞姜偕富孙国领
杭州电子科技大学学报(自然科学版) 2022年1期
田亦飞,姜偕富,孙国领
(杭州电子科技大学自动化学院,浙江 杭州 310018)
0 引 言
网络控制系统(Networked Control Systems,NCSs)是指通过网络来交换数据的闭环系统。由于NCSs省略了繁杂的布线环节并且容易进行扩展维护,因此在许多领域得到广泛应用[1-2]。但是,随着NCSs自身结构的复杂化,故障的诱导因素也越来越多。容错控制分为被动容错与主动容错。当线性时不变系统执行器故障时,文献[3]给出了被动容错控制器设计方案,对系统进行故障补偿,并优化了系统的性能;针对执行器故障的NCSs,文献[4]给出鲁棒主动容错控制器设计方案。众所周知,NCSs的网络带宽是有限的,周期采样控制将许多不必要的数据纳入传输,造成资源浪费。事件触发机制弥补了周期采样控制的缺点,通过触发条件来筛选可以被释放的信号,实现了信号“按需”发送[5-7]。文献[8]提出一种自适应事件触发机制(Adaptive Event-triggered Mechanism, AETM),可以根据系统状态自适应调节其触发参数。随后,AETM吸引了众多学者的目光。例如,文献[9]研究了基于AETM非线性网络控制系统H∞跟踪问题;文献[10]研究了基于AETM非线性系统随机故障检测问题,同时通过示例验证了AETM相较于静态事件触发机制可以获得更大的平均发送周期。但是,AETM仍具有一定保守性,如文献[8]中的触发参数取值范围较小,使得AETM的作用未能充分发挥。为了充分利用网络资源,本文将AETM引入具有参数不确定性和执行器故障的NCSs中,设计一种改进的AETM参数自适应律,使得触发参数变化更加灵活,构造一个合适的L-K泛函,并运用Lyapunov稳定性理论,推导出系统稳定的充分条件。
1 问题描述
1.1 系统模型
假设线性系统模型如下:

(1)

1.2 自适应事件触发机制
假设系统(1)中的传感器以固定采样周期h进行采样,将数据单包发送到AETM,采样序列为S1={0,h,2h,…,kh},k∈{0,1,2,3,…},信号从AETM成功释放的时间序列为S2={t1h,t2h,t3h,…,tkh},tk∈{0,1,2,3,…},显然有S2⊆S1。
参考文献[8],设计如下AETM:
eT(il)Φe(il)≤δ(il)xT(il)Φx(il)
(2)
式中,Φ>0为AETM的权重矩阵,il=tkh+lh,(l=0,1,2,…)为当前采样时刻,tkh为上次信号成功释放时刻,e(il)=x(il)-x(tkh)为当前采样信号减去上次释放的信号。当采样信号不满足式(2)时将被释放。
式(2)中,δ(il)为自适应触发参数,满足
(3)

1.3 基于AETM的闭环NCSs

(4)

τ(t)=t-il,t∈Ω
(5)

引入开关矩阵L来描述执行器故障,其模型描述为L=diag{χ1,χ2,…,χm}。其中,
(6)
采用状态反馈策略,系统控制输入为u(t)=Kx(tkh),t∈Ω。结合式(5)和式(6),u(t)最终表示为:

(7)
结合式(1)和式(7),得到基于AETM的闭环NCSs模型:

(8)
1.4 相关引理

(9)
成立。

(10)
成立。
2 主要结果
2.1 稳定性分析

(11)
式中,
v(t)=F(t)g(t),t∈Ω
(12)

由式(11)和式(12)可知:

(13)
定理1对于给定标量τm,τM,δM∈(0,1),矩阵K和L,若存在正定对称矩阵Φ,N,P,S,Qi,Ri,(i=1,2)和标量ε>0,满足如下矩阵不等式
(14)
则闭环NCSs(8)是渐近稳定的,其中
ψ33=Q2-Q1-R1-S,ψ22=δMΦ-2S+NT+N,ψ44=-Q2-R2-S。
证明构建Lyapunov-Krasovskii泛函

(15)
沿着NCSs(11)的动态轨迹对时间t进行求导,得到:

(16)
由引理1可得:
(17)
(18)
由引理2可得:
(19)
结合式(2),式(16)—式(19)可得:
(20)

Γ11=PA+ATP+Q1-R1-R2+ATΘA,Γ12=PBLK+ATΘBLK,Γ15=PD+ATΘD,
Γ16=-PBLK-ATΘBLK,Γ22=δMΦ-2S+NT+N+(BLK)TΘ(BLK),
Γ25=(BLK)TΘD,Γ26=-(BLK)TΘ(BLK),Γ33=Q2-Q1-R1-S,Γ44=-Q2-R2-S,
结合式(13),运用S-过程,可得:
(21)
对于ε>0,Γ′满足
(22)

2.2 鲁棒容错控制与AETM协同设计

(23)


本文给出的触发参数自适应律中,σ1和σ2为关于误差的反正切函数,与文献[8]相比,不再是2个固定标量,建立了触发参数与误差两者间的联系,使得AETM具有更好的灵活性,同时降低了方案的保守性。
3 仿真示例
假设一类闭环网络控制系统模型[14]的参数如下:
针对执行器状态的不同情形,构建如下开关矩阵L:L1=diag{1,1}表示执行器全部正常,L2=diag{0,1}表示执行器1完全失效,L3=diag{1,0}表示执行器2完全失效,L4=diag{0.8,0.2}表示执行器1和执行器2部分失效。
运用Simulink进行仿真,取仿真时长T=30.0 s。执行器故障的情形下,状态响应曲线如图1所示。从图1可以看出,针对具有执行器故障和参数不确定的NCSs,采用本文设计的方案,保证了系统是渐近稳定的,即提高了系统的鲁棒性能,又使得系统具有较好的容错效果。

图1 状态响应曲线
当NCSs引入AETM后,在30 s内传输了38个采样数据,仅占周期采样控制(h=0.1 s,30.0 s内传输300个数据)的12.7%。采样信号释放时刻与释放间隔如图2所示,δ(il)自适应调节曲线如图3所示。
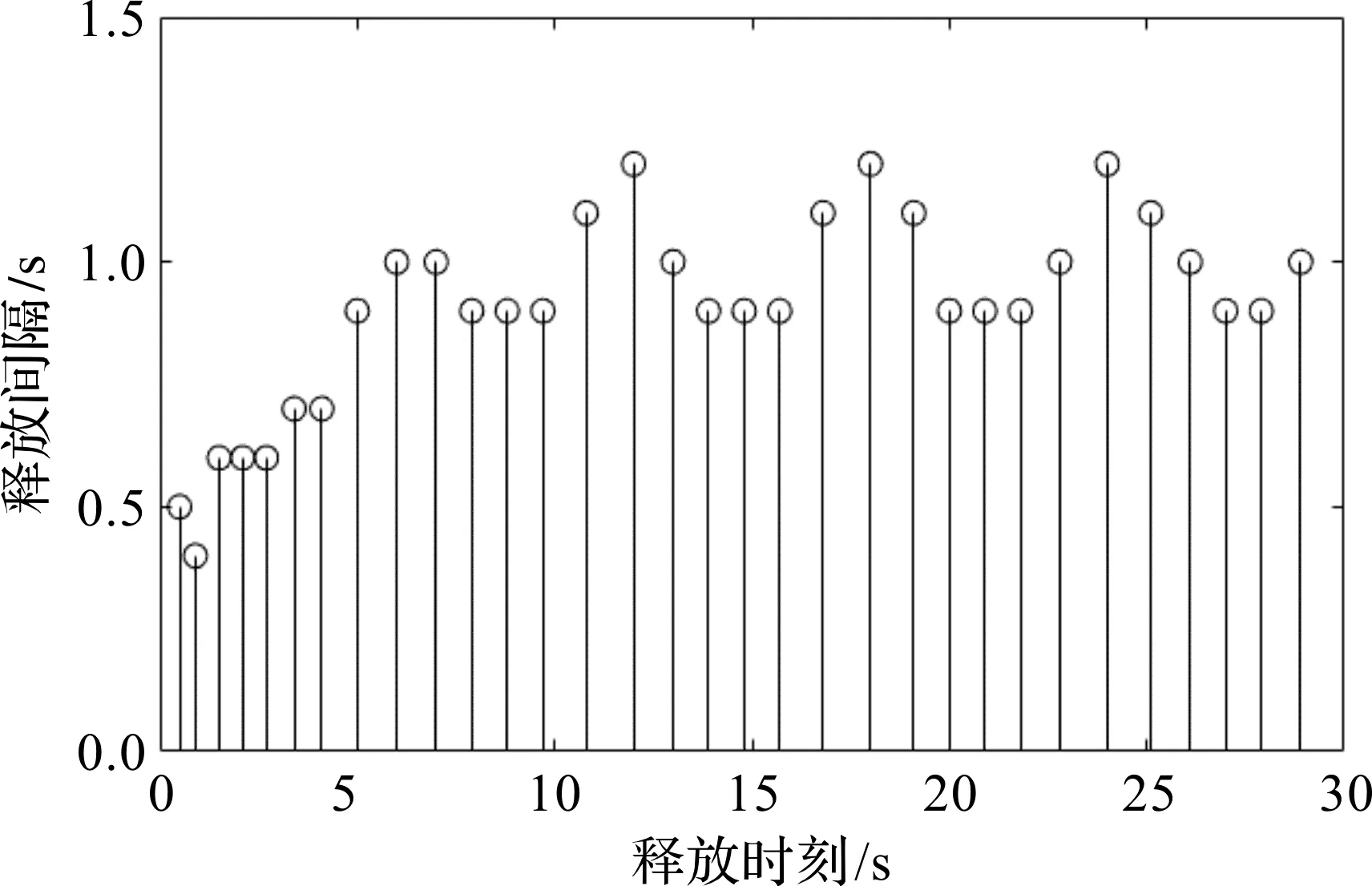
图2 采样信号释放时刻与释放间隔图

图3 δ(il)自适应调节图
从图2可以看出,AETM有效降低了信号的传输频率,节约了网络资源。从图3可以看出,δ(il)不再是一个标量,而是随着系统状态的变动而改变。为了说明本文AETM的优越性,将信号发送频率同其他通讯机制进行比较,结果如表1所示。

表1 不同通讯机制下的信号发送频率
由表1可知,在保证系统稳定性能的前提下,改进后的AETM可以发送更少的数据,提高了平均发送周期。综上分析,本文设计的方案不仅可以有效应对传感器故障问题,同时还可以更加充分地利用网络资源。
4 结束语
针对具有参数不确定性和执行器故障的网络控制系统,本文提出一种鲁棒容错控制与AETM协同设计方案。对现有的AETM进行改进,使得触发参数变化更加灵活。在不等式放缩过程中,运用倒凸组合技术,得到满足鲁棒容错性能的控制器参数,降低了方案的保守性。但是,本文设计的方案没有考虑非线性因素,下一步计划将此方案扩展到非线性网络控制系统中。
猜你喜欢
自动化学报(2019年6期)2019-07-23 01:18:18
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
自动化学报(2017年4期)2017-06-15 20:28:54
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:20
