
中低压直流配电网母线电压稳定控制
2022-02-21 09:34刘沛津石梦涛
电力自动化设备 2022年2期
刘沛津,石梦涛,何 林,贺 宁,陈 武
(1. 西安建筑科技大学机电工程学院,陕西 西安 710055;2. 西安建筑科技大学理学院,陕西 西安 710055;3. 未动用储量开发公司,辽宁 盘锦 124000)
0 引言
随着国民经济的发展和电力电子技术的进步,越来越多的分布式能源(如风能、太阳能)接入电网,越来越多的直流家用产品(如电动汽车)被普及以及工业变频技术(如抽油机、船舶、起重机)被广泛应用,交流配电网面临着分布式能源接入、负荷多样化、网架结构庞杂以及电能供应稳定性、高效性等带来的巨大的挑战[1-3]。与交流配电网相比,直流配电网无需考虑无功功率以及对电网的电压和频率的跟踪问题,减少了大量的电能变换环节,提高了系统的可靠性和效率,可充分协调分布式电源、多样性负荷与电网之间的矛盾,发挥分布式能源的优势[4-5]。直流配电网内负荷突变、间歇性电源输出功率和直流配电网间联络线功率受到扰动等都会对直流母线电压产生冲击,致使其无法在正常范围内运行。如果直流母线电压失稳则将会威胁负荷的稳定运行,甚至导致保护系统动作,严重情况下还会造成系统崩溃影响大电网的运行[6]。因此,直流母线电压的稳定控制对系统的稳定运行具有十分重要的意义。抑制直流配电网电压波动是提升直流配电网稳定性的关键控制技术之一。
系统中直流控制单元对直流母线电压进行控制时,双PI 控制器无法在提高系统动态响应的同时有效抑制直流母线电压发生较大的波动和冲击等所带来的干扰。因此,需要研究有效的控制方法,提高系统的动态响应,并有效抑制电压的波动。目前主要方法有扰动电流或功率前馈控制方法[7]。文献[8]设计了基于鲁棒扰动观测器的直流微电网电压动态补偿控制增强了系统的鲁棒性。文献[9]将线性自抗扰控制器LADRC(Linear Active Disturbance Re⁃jection Controller)应用于微电网的控制运行中,文献[10]引入输出电压导数项提高观测器性能,文献[11]针对系统电容参数变化提出了相应的模型算法,均不同程度地提高了系统的响应速度及抗扰动性能。
1998 年,文献[12]提出了自抗扰控制器ADRC(Active Disturbance Rejection Controller),该控制器由跟踪微分器、非线性状态误差控制器以及扩张状态观测器组成,其主要特点是针对不确定系统,利用扩张状态观测器对扰动进行估计与补偿,利用跟踪微分器合理处理过渡过程,利用非线性状态误差控制律获得控制对象的最终输入。该控制器在不依赖模型精度的情况下能够对系统的内扰和外扰进行有效的抑制,这对于含有扰动的非线性系统具有良好的控制能力。但是由于ADRC 的非线性特性,当控制对象为高阶模型时,参数调节困难。文献[13]提出线性化自抗扰控制器,大幅减少了参数调节工作。可以发现,在上述各前馈控制方法中,扩张状态观测器均是核心组成,其突出特征是能将作用于被控对象的所有内部模型与外部扰动等不确定因素都归结为总扰动进行估计,并根据观测器的实时估计,在反馈控制中对扰动进行补偿,可有效克服观测器设计对模型精确性的依赖,这对于复杂的非线性不确定对象有很好的控制效果,因此适用于直流配电网电压波动的抑制。但对于系统阶次而言,相对阶次越高,带来的相位滞后越大,会给系统动态性能带来不利影响。
综上所述,为了提高动态响应速度,简化参数整定,降低技术应用成本,本文针对直流配电网不确定性新能源出力和负荷扰动对直流电压冲击的扰动特点及控制目标,设计并开发了基于降阶扩张状态观测器的LADRC。通过模拟直流母线电压受到较大负荷扰动的工况进行仿真和实验验证。结果表明该控制器参数易整定,易实现,且负荷鲁棒性、稳定性及实时性明显优于传统双PI 控制器。本文所设计实现的控制器的主要优点在于通过采用降阶扩张状态观测器,能有效降低观测器的阶次,使得在相同带宽下,控制系统鲁棒性更强,跟踪性能更好[14-15]。抗扰动性能、实时性和控制的易实施性也是本文控制方法的主要特点,因此更适合推广应用于实际直流配电网的就地控制层,从而有效抑制直流配电网的电压波动。
1 AC/DC变换器模型
小功率中低压配电网中AC/DC 变换器的拓扑结构如图1 所示。图中,ea、eb、ec为电网侧电压;ia、ib、ic为电网侧电流;L为滤波电感;R为开关损耗电阻与电感电阻之和;va、vb、vc为输入相电压;udc为直流电压;idc为直流侧电流;iL为负荷电流;RL为负荷等效电阻;C为直流母线滤波电容。定义开关函数Sk(k=a,b,c),Sk=1表示k相的上桥臂导通、下桥臂关断,Sk=0表示k相的上桥臂关断、下桥臂导通,即:

图1 三相电压型AC/DC变换器拓扑Fig.1 Topology of three-phase voltage-typeAC/DC converter
Sk={1上桥臂导通,下桥臂关断0 上桥臂关断,下桥臂导通k=a,b,c (1)
传统的AC/DC 变换器采用电压电流双闭环控制策略,实现网侧电流和直流电压的零误差跟踪。但是直轴电流id和交轴电流iq仍然存在耦合关系,无法单独控制。根据典型Ⅱ型系统,将电流内环的PI控制近似等效成惯性环节Wci(s)。电压外环的开环传递函数如式(2)所示。

式中:m= 3Um/Udc≤1,Um为相电压峰值,Udc为直流电压有效值。
由式(2)可以看出,电网电压、负荷、直流电压的变化都会影响电压外环的控制效果,对系统的动态性能造成不利影响,同时固定的PI 参数不利于跟踪系统的变化。
2 基于降阶扩张状态观测器的LADRC设计
直流配电网内负荷突变、间歇性电源输出功率以及直流配电网间联络线功率受到扰动等都会影响直流母线电压的稳定。针对直流母线电压的扰动,将LADRC 引入AC/DC 变换器,从而提高系统抗负荷扰动的能力。
2.1 扩张状态观测器设计
根据式(2),变换器状态空间表达式可以表示为式(3)。
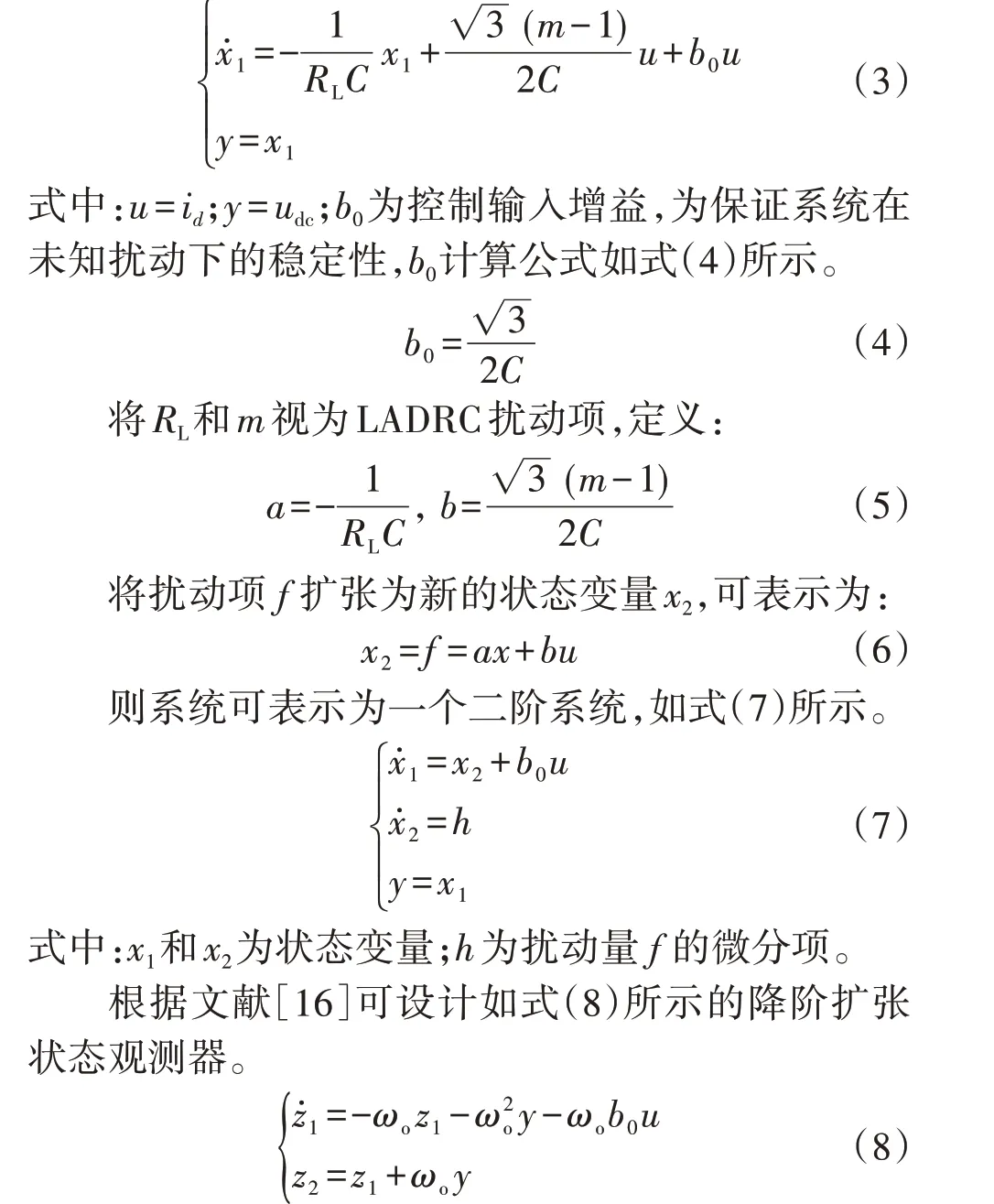
式中:z1为扩张状态观测器的状态变量;z2为观测值;ωo为状态观测器的带宽。
2.2 LADRC设计
由于状态变量x1可以直接测量,因此可以设计如图2所示的LADRC。

图2 LADRC的控制框图Fig.2 Control block diagram of LADRC
使用扩张状态观测器可以实现对扰动量x2的估计:

式中:ωc为控制器带宽。
为保证扩张状态观测器的观测性能,取ωo<ωi,电流内环的带宽为ωi≈1/(3Ts),其中Ts为开关周期。
3 稳定性分析
3.1 观测器误差分析


3.2 控制器稳定性分析
根据式(6)、(7)、(16)和图2 可以得到u0到y的控制流程框图如图3 所示。定义kb=b/b0,可以得到u到u1的传递函数如下:


图3 引入降阶线性扩张状态观测器后的广义被控对象框图Fig.3 Block diagram of generalized controlled object after reduced-order linear extended state observer is introduced
故而可以得到系统的等效控制框图如图4所示。

图4 系统的等效控制框图Fig.4 Equivalent control block diagram of system


因此,对于满足上述条件的任何参数,式(26)都是成立的,即满足系统的稳定性条件。可以看出,系统参数稳定范围较大,参数整定相对容易,降低了工程应用难度。
3.3 跟踪性能分析
为了进一步说明LADRC 应对负载扰动问题的有效性,在此以近似的标准设计了基于LADRC 和双PI 控制器的AC/DC 变换器系统,并绘制了直流电压闭环传递函数的波特图,如图5所示。

图5 波特图对比Fig.5 Comparison of Bode diagrams
由图5 可得:采用自抗扰控制策略时,负载发生变化的情况下,系统能在保证一定稳定裕度的同时确保良好的跟踪性能;而采用PI 控制策略时,系统受到负载变化的影响较大。以上分析说明自抗扰控制策略应对负载变化控制效果更好。
4 仿真分析
在中低压直流配电网中,直流配电网内负荷突变、间歇性电源输出功率及直流配电网间联络线功率受到扰动等导致直流母线大范围波动都是系统实际运行中的典型工况。基于MATLAB/Simulink 软件对第2 节提出的LADRC 设计了仿真实验,实验采用电阻投切的方式模拟系统即插即用典型工况来验证本文所提出的基于降阶线性扩张状态观测器的LADRC 的抗扰性能,仿真参数如附录A 表A1所示。在0.1 s 时令负荷由11 Ω 变为22 Ω,在0.3 s 时令负荷变回11 Ω,仿真结果如图6所示,图中依次展示了负荷扰动下用传统双PI控制器和LADRC的AC/DC变换器直流母线电压、相电流、有功功率、无功功率的波形。

图6 抗负荷扰动性能Fig.6 Performances against load disturbance
由图6 可知,负荷扰动的情况下采用传统双PI控制器和LADRC 的相电流依然能够保持同相位,电流波形正弦性好,且其有功功率变化明显,无功功率维持在0 附近。仿真结果显示了在负荷扰动的情况下,采用2种控制器的AC/DC变换器都能保证高功率因数运行,维持了良好的性能指标。而在直流母线电压的鲁棒性方面,采用传统双PI 控制器和LADRC 的控制效果产生了具有差异性的表现。在负荷突增的情况下,采用LADRC 的AC/DC 变换器直流侧电压跌落幅度最大为13.2 V,经过11 ms恢复稳定;在负荷突减的情况下,直流侧电压上升幅度最大为13.4 V,经过12 ms恢复稳定。在负荷突增的情况下,采用传统的双PI 控制器的AC/DC 变换器直流侧电压跌落幅度最大为29.6 V,96 ms 后恢复稳定;在负荷突减的情况下,直流侧电压上升最大幅度为29.5 V,85 ms后恢复稳定。
面对同样的负荷扰动,采用LADRC 的AC/DC变换器直流母线电压最大变化幅度只有传统双PI控制器的45%左右,并且其恢复稳定的速度是传统双PI 控制器的8 倍左右。综上,仿真结果显示了本文所优化设计的AC/DC 变换器抗负荷扰动性能具有显著优越性。
5 实验验证
为了进一步验证本文提出的优化控制算法的实际可行性,在理论分析与仿真实验的基础上,基于TMS320F28335 进行了控制算法的C 语言实现和移植,对所开发的AC/DC 变换器进行了性能测试。硬件实验系统结构及实物图分别如附录A 图A1 和图A2所示。
为了分析直流母线负荷大范围波动情况下AC/DC 变换器直流侧电压的波动情况,以电阻投切的方式模拟直流配电网即插即用引起的典型载荷波动工况。图7、8 分别为负荷突增和突减情况下,利用示波器观察到的AC/DC 变换器直流母线电压波形。

图7 负荷突增工况模拟Fig.7 Simulation of load sudden increasing
由图7可知:在负荷突增的情况下,采用LADRC的AC/DC 变换器直流母线电压跌落最大幅度约为0.8 V,约26 ms后恢复到稳定状态;采用传统双PI控制器的AC/DC 变换器直流母线电压跌落最大幅度约为3.2 V,约75 ms 后恢复稳定。由图8 可知:在负荷突减的情况下,采用LADRC 的AC/DC 变换器的电压上升最大幅度为2.8 V 左右,约在22 ms 后恢复稳定;采用传统双PI 控制器的AC/DC 变换器的电压上升幅度约为4.8 V,约在130 ms后恢复稳定。

图8 负荷突减工况模拟Fig.8 Simulation of load sudden decresing
由实验结果可以看出,在负荷突变的情况下,相比于采用双PI控制器,采用LADRC 的AC/DC 变换器直流母线电压变化更小,恢复稳定速度更快,对于提高系统稳定性有显著效果。
6 结论
针对中低压直流配电网母线电压易受负荷突变、间歇性电源输出功率以及直流配电网间联络线功率扰动等影响的问题,本文提出了一种在电压外环引入基于降阶扩张状态观测器的线性自抗扰控制策略,并设计了控制器。经理论仿真分析及实验验证,结果表明该控制器能在负荷波动较大的情况下,维持直流母线电压的稳定。相比于采用传统双PI控制器的AC/DC 变换器,采用本文所提控制器时直流母线电压波动更小,恢复更快,鲁棒性更好,且其不依赖系统参数,设计过程简单,易于实现,有较高的应用价值。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
北京航空航天大学学报(2021年7期)2021-08-13
科技信息·学术版(2021年7期)2021-01-10
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
煤矿机电(2020年5期)2020-11-02
空间科学学报(2020年6期)2020-07-21
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年6期)2019-03-04
课程教育研究·学法教法研究(2018年20期)2018-08-11
北京航空航天大学学报(2017年6期)2017-11-23
