
基于动态均衡凸-凹步骤法的含PI型DG配电网无功优化
2022-02-21 09:34刘健辰张淏源
电力自动化设备 2022年2期
刘健辰,张淏源
(辽宁工程技术大学电气与控制工程学院,辽宁 葫芦岛 125105)
0 引言
由于具有经济效益好、环保节能、运行灵活等特点,分布式电源DG(Distributed Generation)在现代配电系统中的占比逐年增加[1]。光伏电站可利用建筑屋面的优势,不受资源分布地域限制,属于我国鼓励力度最大的绿色电力开发能源项目。但随着DG 在配电网中渗透率的提高,线路功率越限的概率和配电网运行控制的难度也大为增加,因此,亟需研究适用于大规模DG接入下的配电网运行优化方法[2-3]。
根据并网接口约束模型,DG 主要分为PQ、PI、PV 和PQ(V)这4 种类型[4]。当光伏发电系统、储能系统、燃料电池等通过电流控制型逆变器并网时,其通常运行于恒定输出电流状态,称之为PI 型DG。含PI 型DG 的配电网无功优化模型,不仅包含非线性交流潮流约束方程和代表无功补偿电容器组投切组数的整数变量,还包含描述PI型DG非线性并网功率接口特性的约束方程,因此该模型本质上是一个难以直接求解的混合整数非线性规划MINLP(Mixed Integer NonLinear Programming)问题。
现有一些研究通过非线性规划、二次规划等数学规划方法以及遗传算法、粒子群优化算法等启发式算法求解配电网无功优化问题,也有一些研究关注于时段解耦无功优化、鲁棒或分布式无功优化问题[5-7]。启发式算法简单易用,但存在无法保证全局收敛、容易陷入局部最优解的固有缺点。近年来,研究者将原用于求解配电网交流潮流方程的二阶锥松弛SOCR(Second-Order Cone Relaxation)技术进行推广,提出基于混合整数二阶锥规划MISOCP(Mixed-Integer Second-Order Cone Programming)的配电网无功优化方法[8-11]。
文献[8-11]均将PI 型DG 的非线性并网功率接口模型近似为恒功率模型,忽略了DG 特殊控制方式对系统运行的影响,可能造成优化结果与实际情况存在较大偏差,特别是当系统负荷水平高而造成接入节点电压显著偏离额定值时,将导致产生无法忽视的近似误差。文献[12]利用SOCR 技术提出一种可以精确处理含PI 型DG 配电网运行优化问题的初步解决方法,但SOCR 变换模型的解是否满足原始非凸约束方程,即SOCR 的可行性问题仍有待深入研究。对于不含PI 型DG 的配电网,只要不存在零电阻线路,最小化网损目标函数就可以保证SOCR可行性,而在接入PI 型DG 的情况下,直接采用该方法会导致PI 型DG 功率接口约束方程与交流潮流约束方程的SOCR 可行性发生冲突,从而极大影响无功优化方案的实际应用。
为解决SOCR 的可行性问题,最简单的可行性恢复方法是在目标函数中引入适当的惩罚项,称为惩罚目标函数POF(Penalty Objective Function)法。实际上,原始SOCR法中采用的网损目标函数隐含地作为惩罚项,起到了可行性恢复的作用,但对POF法在含PI型DG情况下的性能,目前尚缺乏深入研究。
解决SOCR 可行性问题的另一种途径是采用凸-凹步骤CCP(Convex-Concave Procedure)法(为与本文提出的改进方法进行区别,将该方法称为基本CCP 法),该方法是一种局部启发性算法,其借助凸优化工具求解凸差规划问题的局部最优解[13],目前该方法已被应用于一些电力系统优化问题中[14-16]。文献[14]针对放射性配电网,应用基本CCP 法解决了某些无法满足可行性的特殊最优潮流问题。文献[15-16]应用基本CCP 法分别解决了一般网状电网最优潮流问题、电-气最优潮流问题和多区域电-气潮流分布式优化问题。但目前还缺乏基本CCP法在含PI型DG情况下的具体应用、性能分析和改进。
综上,本文研究含PI 型DG 的配电网无功优化相关的SOCR 可行性恢复问题。首先,建立计及PI型DG 精确并网功率接口特性的配电网无功优化模型,并利用SOCR 技术将原始MINLP 问题转化为MISOCP 问题;然后,分析POF 法、基本CCP 法和动态均衡CCP(dynamically-balancing CCP)法这3 种可行性恢复方法的可行性恢复机理和优缺点;最后,通过数值测试比较3种可行性恢复方法的性能。
1 配电网无功优化模型
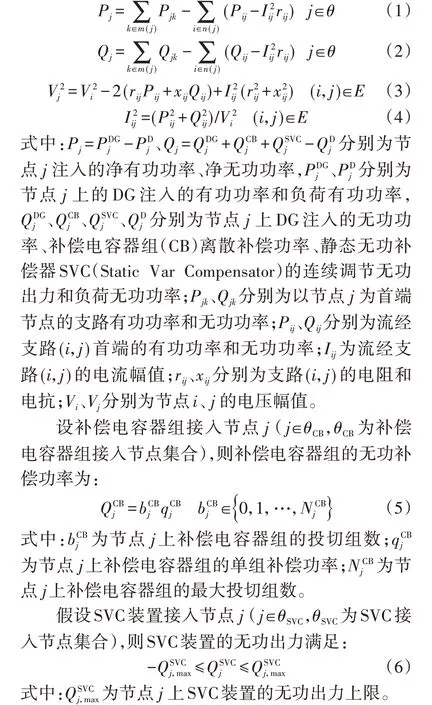
考虑一个包含节点集合θ的配电网,支路(i,j)∈E连接节点i和节点j,E为支路集合,n(j)为配电网中末端为节点j的支路的首端节点集合,m(j)为配电网中首端为节点j的支路的末端节点集合。为便于运行管理和继电保护系统设计,配电网一般以辐射状运行,因此,配电网无功优化问题的支路潮流约束可以表示为:
光伏发电系统是利用光伏阵列的光伏效应,将太阳光辐射能直接转化为电能的一种发电系统。目前,DC/AC 逆变器的输出控制一般采用电流控制方式,可使功率因数恒定为1,而为了使电网经济稳定运行,通过电流控制型逆变器控制的光伏发电系统也可以发出一定的无功功率对电网进行无功补偿。由于在正常工作条件下,采用电流控制型逆变器并网的光伏发电有功输出功率和注入电网的电流幅值均保持恒定,因此在潮流计算中将这种类型DG的接入节点处理为PI型节点[4]。同时,储能系统、燃料电池等在通过电流控制型逆变器并网时,也应将接入节点处理为PI型节点。

2 SOCR技术及其可行性问题
2.1 SOCR技术
2.2 SOCR可行性
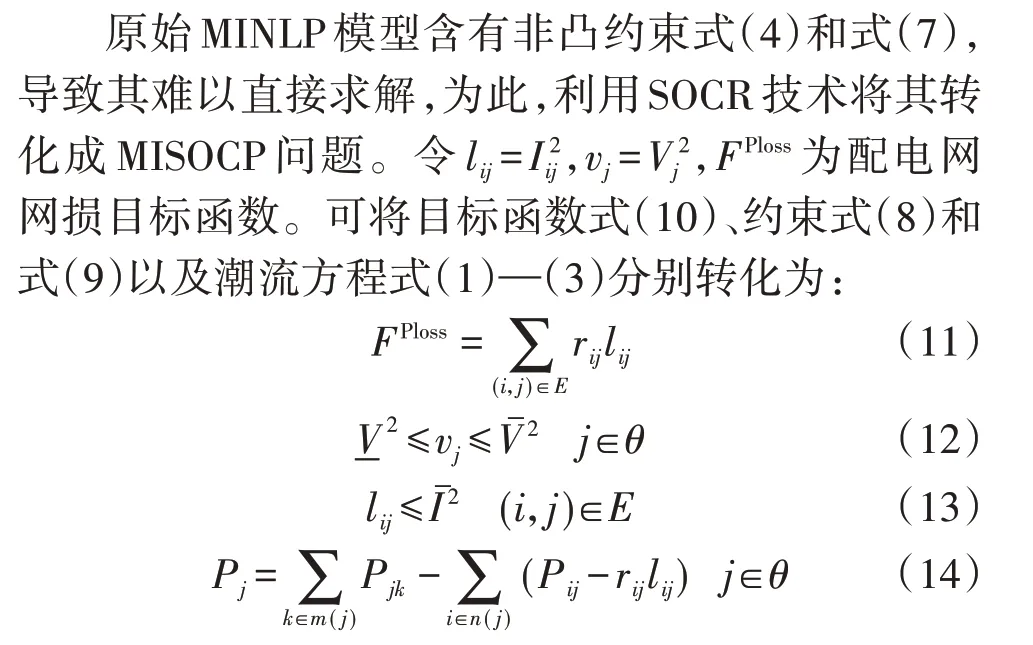
利用SOCR 技术,将原始非凸等式约束式(4)和式(7)分别松弛为凸的二阶锥约束式(17)和式(18),这样有利于借助成熟的内点法进行高效求解。但需注意的是,MISOCP模型仅仅在其解使二阶锥约束式(17)和式(18)的大于等于号两边严格相等时,才与原始MINLP 模型等价,即MISOCP 模型的解不一定能解决原始MINLP 问题,造成MISOCP 的解丧失可行性。
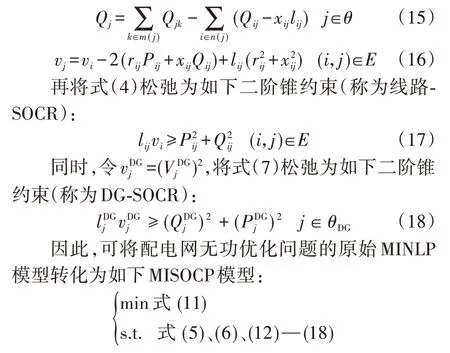
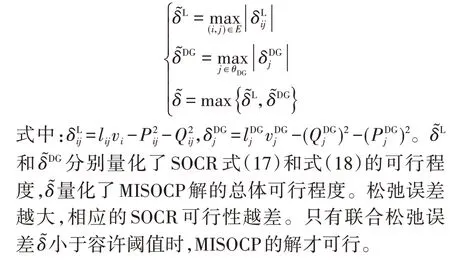
定义:如果MISOCP 的解能保证原始非凸约束成立,则称其具有SOCR 可行性。为了定量刻画SOCR 可行性,定义线路松弛误差δ͂L、DG 松弛误差δ͂DG和联合松弛误差δ͂分别为:
3 可行性恢复方法
对于电力系统的实际优化问题,其解的可行性至关重要,如果一个解是不可行的,则其将完全没有实用意义。对于不含PI 型DG 的配电网,其无功优化问题的MISOCP 模型仅包含线路-SOCR 式(17)。文献[13]指出,只要不存在零电阻线路,最小化网损目标函数式(11)就可以保证线路-SOCR 式(17)的可行性。可以直观理解为:在rij≠0(∀(i,j)∈E)的条件下,最小化式(11)等价于使所有线路的lij都减小,从而使式(17)大于等于号两边趋于相等,最终达到提高式(17)可行程度的效果。
但在接入PI 型DG 的情况下,最小化网损目标函数式(11)一般难以使DG-SOCR 式(18)大于等于号两边相等。这是由于在DG 出力水平非常高时,线路中可能出现反向潮流,线路中lij的减小可能对应于DG 接入节点电压vDGj的升高或DG 无功出力QDGj的减小,从而使式(18)大于等于号两边更加不相等。因此,对于含PI 型DG 配电网的优化问题,有必要研究新的可行性恢复方法。
需要指出的是,线路-SOCR 和DG-SOCR 的可行性往往是矛盾的,即提高其中一方往往以降低另一方为代价。而由于可行性恢复方法旨在提高MISOCP解的总体可行程度,即线路/DG松弛误差必须同时满足要求,因此可行性恢复目标是减小联合松弛误差δ͂,使之小于容许阈值。
下面依次给出3 种可行性恢复方法:POF 法、基本CCP法和动态均衡CCP法。
3.1 POF法
最简单直观的可行性恢复方法是在目标函数中引入适当的惩罚项,从而增大DG-SOCR 式(18)大于等于号的右边,或减小大于等于号的左边,使大于等于号两边趋于相等,这就是POF法的基本思想。

POF 法的优点是无需迭代,因此不会增加求解问题的复杂度,但DG 接入可能会引起线路中出现逆向潮流,从而使配电网网损目标函数FPloss与惩罚目标函数FPenalty发生冲突,其表现为增大惩罚系数β提高DG-SOCR 式(18)的可行性,必然会降低线路-SOCR式(17)的可行性,进而导致在某些情况下无法通过调整惩罚系数β使联合松弛误差小于容许阈值,即无法恢复MISOCP解的总体可行性。
3.2 基本CCP法
为了克服POF 法的缺陷,下面考虑应用基本CCP法恢复MISOCP解的总体可行性。
为了应用基本CCP 法,首先需要将原始非凸约束表示为凸差函数(即2 个凸函数之差)的约束形式。根据文献[17],很多函数(如任意二阶连续可微函数)都可以表示为凸差函数形式。原始非凸约束式(4)和式(7)均为二次等式,满足二阶连续可微条件,因此可以表示为如下凸差函数形式:



关于基本CCP法的补充说明见附录B。
3.3 动态均衡CCP法
在实际应用中,基本CCP 法在某些情况下可能无法完成可行性恢复任务,而且即使可以恢复可行性,也往往会导致原优化目标大幅增加,即严重损害解的最优性,其原因有如下2个方面。
1)基本CCP 法以POF 法产生初始解,但POF 法本身的最优性较差,这导致基本CCP 法只能在最优性较差的局部进行寻优。
2)基本CCP 法采用固定权值γ,权值起到平衡局部寻优方向的作用。γ较大,会使优化结果偏向于减小DG 松弛误差,同时增大线路松弛误差;而γ较小,会增大DG 松弛误差。根据联合松弛误差的定义,为了提高算法的总体可行性,需要使DG/线路2 种松弛误差均在允许阈值以下。采用固定权值可能导致寻优偏向降低DG/线路松弛误差中的一方,造成总体可行程度下降,即当不可行约束发生变化时,固定权值会导致无法调整局部寻优方向,使寻优方向一直“跑偏”,特别是在DG 出力水平较高时,基本CCP 法可能进入“不可行误区”,无法在有限次迭代内找到可行解。
根据以上分析,本文提出一种动态均衡CCP法,其与基本CCP法的区别主要如下。
1)考虑到局部最优可行解往往在SOCR 解附近[18],动态均衡CCP 法以SOCR 法产生初始解,这将更为合理。
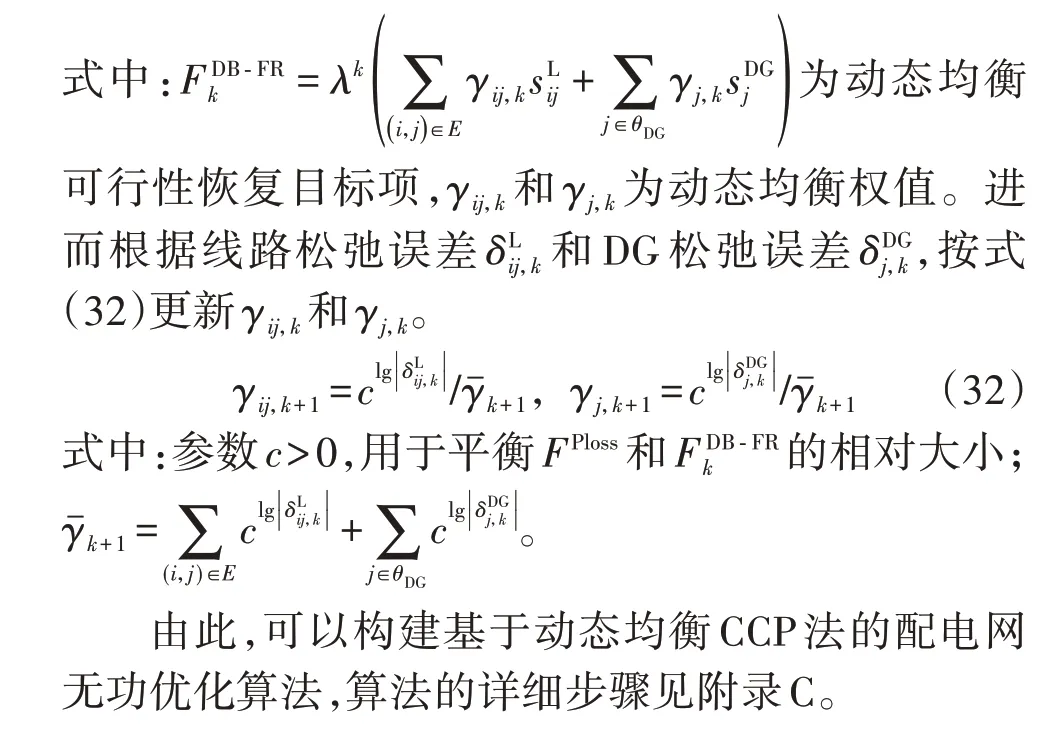
2)动态均衡CCP 法采用能反映线路/DG 松弛误差相对大小的动态均衡权值代替固定权值,从而在迭代过程中不断调整局部寻优方向,对较大的松弛误差给予较大的权值,使各松弛误差减小,避免方法进入“不可行误区”,并且有利于改善解的最优性。具体是将所需求解的SOCP问题的目标函数改为:

4 算例分析
本节利用图1 所示修改的Baran&Wu 33 节点系统验证所提方法的有效性,该系统中线路和负荷的原始数据见文献[17]。图1 中,3 个PI 型DG(DG1—DG3)分别接入节点6、节点14 和节点29;2 个补偿电容器组(CB1、CB2)分别接入节点8 和节点25,补偿电容器组的最大投切组数均为10 组,单组补偿功率均为50 kvar;2个SVC(SVC1、SVC2)分别接入节点9和节点26,可调功率范围均为-300~300 kvar。节点电压约束范围为0.95~1.05 p.u.。在MATLAB R2014b 环境下,基于Mosek 算法包求解。系统硬件环境为CPU 3.2 GHz,8 GB RAM。

图1 修改的Baran&Wu 33节点系统Fig.1 Modified Baran&Wu 33-bus system
4.1 采用PI型DG精确并网模型的必要性
由表1 可见:在不同的负荷水平下,SOCR 法的松弛误差均不大于10-8,满足可行性要求,可以作为精确解;近似处理方法的计算误差会随着负荷水平的增大而急剧增加,在负荷水平为2 和3 时,计算误差分别达到14.70%和35.50%,可能导致无功优化结果严重偏离真实值;随着负荷水平的增大,DG 接入节点电压幅值也会显著低于额定值,这是引起近似计算方法误差严重增大的根本原因。

表1 不同负荷水平下的潮流计算结果Table 1 Power flow calculation results under different load levels
4.2 POF法的可行性丧失问题
假设3 个PI 型DG 的有功出力均为m×100 kW,输出电流均为m×20 A,不同的DG 出力水平m和惩罚系数β下POF 法的求解结果如表2 和表3 所示。为了便于表示,表2 和表3 中采用对数松弛误差lgδ͂L和lgδ͂DG,并且用虚线分隔对数松弛误差大于-6和小于-6的情况。由表2和表3可知:
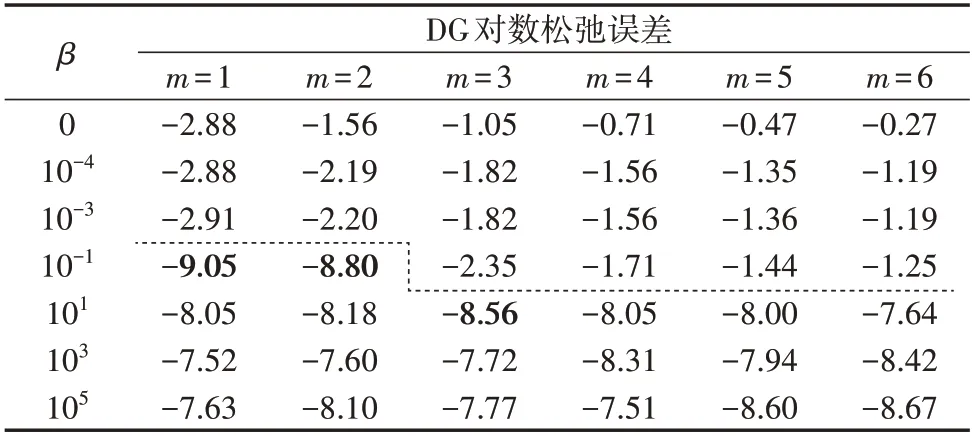
表2 DG对数松弛误差Table 2 Logarithmic relaxation errors of DGs

表3 线路对数松弛误差Table 3 Logarithmic relaxation errors of lines
1)当不引入惩罚目标函数FPenalty(对应于表1 中β=0的情况)时,DG松弛误差δ͂DG均远大于10-6,这表明SOCR法本身无法找到可行解;
2)随着惩罚系数β的增大,DG 松弛误差δ͂DG变小,而线路松弛误差δ͂L增大,体现了这2 个松弛误差是相互冲突的;
3)除了少数情况(表2 和表3 中数据为粗体的3种情况)外,δ͂L和δ͂DG中总有1 个大于10-6,这表明POF法通常无法找到可行解。
上述结果表明,在POF法中,虽然可以通过增大β来减小δ͂DG,但会导致δ͂L随之增大以致超过可以接受的水平。并且本文发现,如果m=16,即使β增至105,δ͂DG仍然只能下降到0.003 9,且下降速度极为缓慢,这表明当DG 出力水平较高时,即使仅对于DGSOCR,POF法也无法恢复其的可行性。
4.3 基本CCP法和动态均衡CCP法的性能比较
本节从3 个方面考察基本CCP 法和动态均衡CCP法的性能。
1)可行性。以δ͂<10-6为标准,即设ρ=10-6。
2)最优性。以原始配电网有功目标函数进行评价,网损越小,最优性越好。
3)快速性。由迭代次数进行评价。
基本CCP 法的参数设定为:β=10-4,γ=2Nbus,λ1=10-2,λmax=100,α=2,其中Nbus为系统节点数。动态均衡CCP 法的参数设定为:λ1=10-2,λmax=100,α=2,c=3。表4 给出了基本CCP 法和动态均衡CCP法的求解结果以及POF法所得网损目标函数值。由表4可得如下结论。
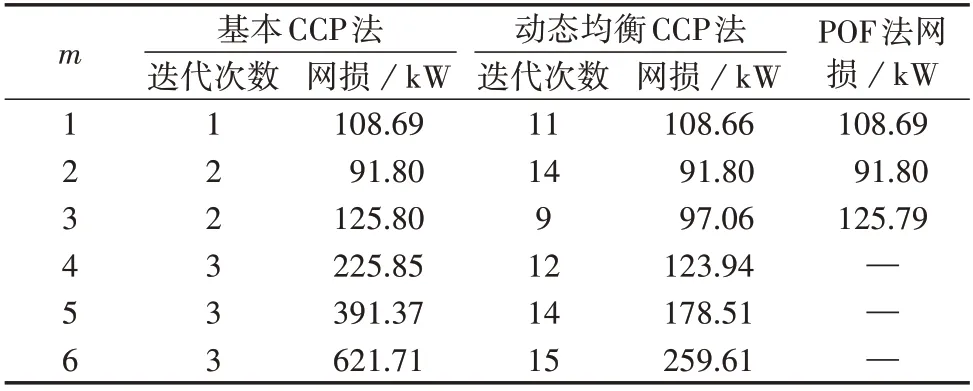
表4 基本CCP法和动态均衡CCP法的求解结果Table 4 Solution results of basic CCP method and dynamically-balancing CCP method
1)可行性方面。相比于POF 法,基本CCP 法和动态均衡CCP 法在m为1~6 的情况下均可以实现可行性恢复。但需注意的是,当DG 出力水平特别高时,基本CCP 法可能失效。图2 给出m=16 时,基本CCP法和动态均衡CCP法的联合对数松弛误差迭代变化曲线。由图可见:基本CCP 法的联合松弛误差开始下降较快,但在第2 次迭代之后又逐渐增大,直至第24 次迭代期间,联合松弛误差一直在10-6~10-5区间内振荡变动,而没有下降趋势;在经过12 次迭代后动态均衡CCP法的联合松弛误差达到允许误差要求,找到可行解而结束迭代。这表明在DG 出力水平较大的情况下,动态均衡CCP 法的可行性恢复能力优于基本CCP 法。为了更加深入地比较基本CCP 法和动态均衡CCP 法,附录D 图D1 分别给出了m=16 时这2 种方法的DG/线路对数松弛误差迭代变化曲线。由图可见:经过2 次迭代后基本CCP 法的DG 松弛误差可降至10-6,并且继续下降;线路松弛误差迅速增至10-6,并且继续振荡增大。这表明基本CCP 法由于采用固定权值,只会以线路松弛误差的快速增大为代价来换取DG 松弛误差的减小,两者无法均衡,从而使该方法进入“可行性误区”,难以找到可行解,而动态均衡CCP 法由于采用动态均衡权值,通过不断调整局部寻优方向,可以降低进入“不可行误区”的可能性,且动态均衡CCP 法采用SOCR 法产生初始解,使其线路松弛误差上升较慢,这也有利于找到局部可行解。
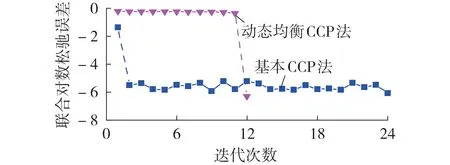
图2 m=16时联合对数松弛误差Fig.2 Joint logarithmic relaxation errors when m=16
2)最优性方面。在m为1和2时,基本CCP法和动态均衡CCP 法的最优性能相同,但随着m继续增大,动态均衡CCP法的最优性远优于基本CCP法,特别是在m为5和6时,动态均衡CCP法的网损比基本CCP 法减少50%以上,这表明在DG 出力水平较高时基本CCP 法的最优性可能受到较大损害,同时体现了动态均衡CCP法相较于基本CCP法在最优性保持能力方面的优势。另外,在m为1~3 时,基本CCP法与POF 法的网损基本相同,这是由于基本CCP 法由POF 法产生初始值,导致其最优性严重受到POF法的影响。
3)快速性方面。基本CCP法和动态均衡CCP法的迭代次数均受到DG 出力水平的影响。在大多数情况下,随着m增大,迭代次数也会增加,这是由于当m增大时,基本CCP 法和动态均衡CCP 法中初始解的DG松弛误差均随之变大(见表2中β为0和10-4的情况),因此需要较多次迭代才能降低DG 的松弛误差。此外,随着m增大,迭代次数增大的速度比较缓慢,这表明在m为1~6 的情况下,基本CCP 法和动态均衡CCP法受DG接入水平的影响均较小。
综合以上3 个方面可知,相较于基本CCP 法,本文提出的动态均衡CCP法在可行性恢复能力和最优性保持能力方面均具有优越性,但也降低了快速性。从工程实际角度,首先应该满足可行性要求,因为不可行的优化结果会严重偏离实际实施效果,是完全没有意义的,同时应尽量满足最优性要求,因为最优性直接决定了优化方案的经济效益,较差的最优性将会使优化方案丧失应用价值,在满足前两方面要求的基础上再尽可能兼顾快速性,因为无功优化的实时性要求并不高。实际上,受制造工艺和设备寿命的限制,CB 等无功优化设备不允许频繁投切,典型的无功优化场景是将全天分为24 个时段,1 h 的优化周期对于本文提出的优化算法是充足的,此外,可以通过提升计算机CPU 的计算能力或借助于其他分解并行算法进一步提升优化算法的快速性,因此,动态均衡CCP法通过改进可行性和最优性,可以在本质上提高无功优化算法的实用性。
基本CCP法和动态均衡CCP法都包含一些算法参数,这些参数通常不存在固定的最优取值,只能根据具体问题而确定,附录A中针对动态均衡CCP法,分析了这些参数对算法性能的影响。
4.4 多时段无功补偿
本节对多时段无功补偿场景进行仿真,设置系统总负荷(标幺值)见图3。在上午、下午和夜间共出现3个负荷高峰,3 个PI 型DG 的出力水平m均设置为1,求解得到总DG 出力(标幺值)见图3。DG 并网前后和采用无功补偿前后的系统网损变化见图4。
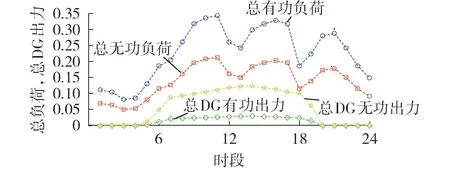
图3 负荷和DG出力变化曲线Fig.3 Variation curves of load and DG output
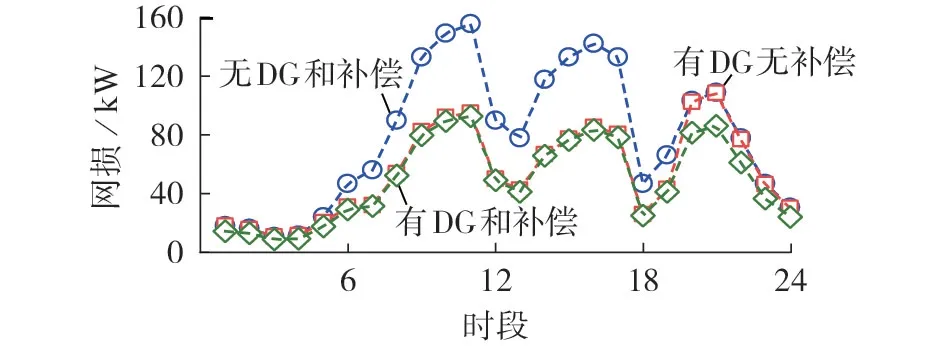
图4 网损变化曲线Fig.4 Variation curves of network loss
由图4 可知,DG 并网后系统网损大幅下降。系统平均网损由DG 并网前的77.64 kW 下降到DG并网后的52.73 kW。这主要是由于PI 型DG 在输出有功功率的同时会产生大量无功功率,大幅减少了线路中的无功潮流,从而有效降低了网损。此外,引入无功补偿后,系统平均网损下降为48.05 kW,这体现了无功补偿的效果。图5 给出了各时段无功补偿装置的出力(标幺值)曲线。由图可见,在时段1—5、20—24,DG 没有出力,因此无功补偿装置均输出无功功率以补偿无功负荷,而在时段6—8,随着DG 出力的增加,配电网中出现局部无功功率过剩的现象,只具有单向调节能力的补偿电容器组CB1不再输出无功功率,而具有双向调节能力的SVC1开始消耗过剩的无功功率,各无功补偿装置与DG配合共同满足系统负荷并降低网损。
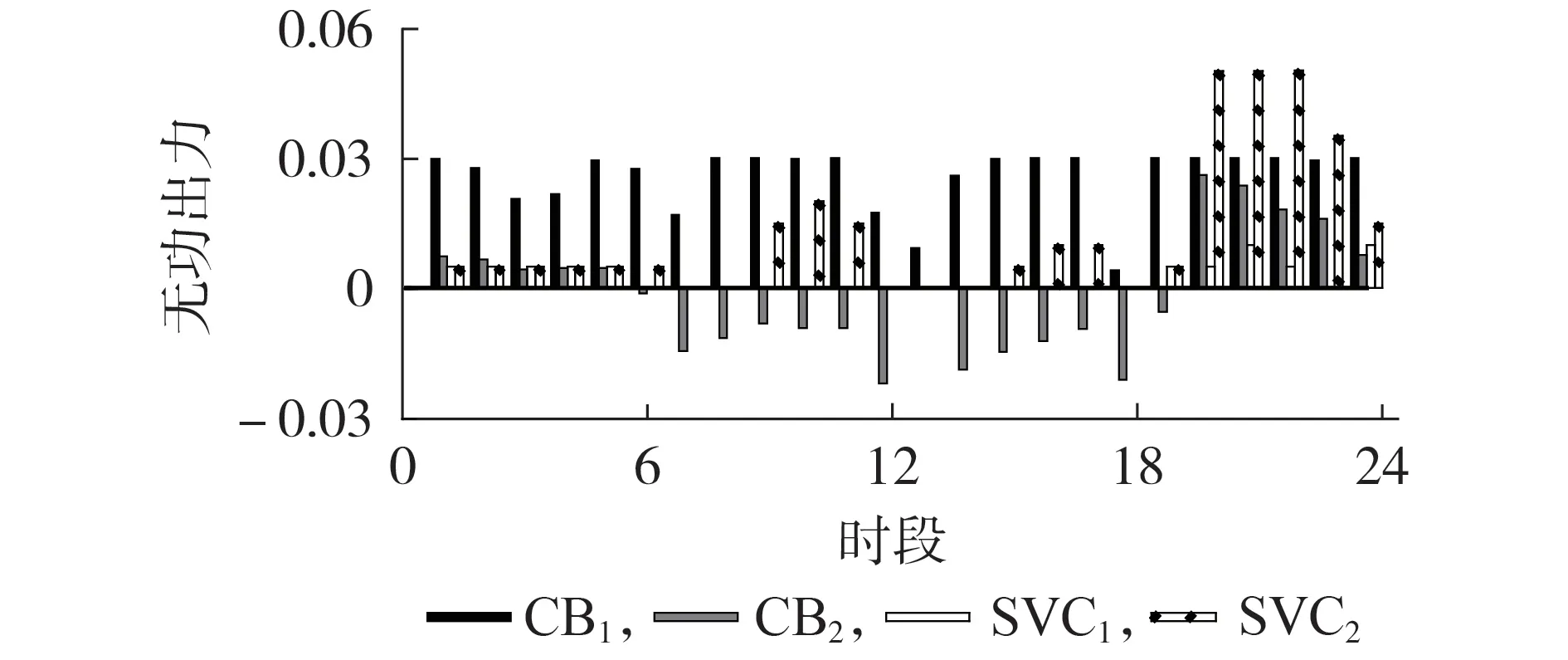
图5 无功补偿装置的出力Fig.5 Output of reactive power compensation devices
5 结论
对于计及PI 型DG 精确并网接口特性的配电网无功优化问题,由于DG 功率接口约束方程和交流潮流约束方程的可行性间存在冲突,直接采用SOCR技术常常无法获得可行解。为此,本文给出3 种具有可行性恢复能力的无功优化方法,即POF法、基本CCP 法和动态均衡CCP 法。理论分析和算例表明:POF法无需迭代,但在很多情况下无法找到可行解;基本CCP 法可在DG 出力水平不高时快速找到可行解,但会导致最优性严重下降;动态均衡CCP法采用SOCR法产生初始解,并以动态均衡权值代替固定权值,可在DG 出力水平特别高时找到可行解,且有效改善了解的最优性。笔者后续研究目标是提高动态均衡CCP 法的寻优速度,以及将动态均衡CCP 法推广到电-气-热混合能流优化问题等应用场景。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
昆明医科大学学报(2022年3期)2022-04-19
文化创新比较研究(2020年8期)2021-01-22
电子制作(2019年16期)2019-09-27
中国航海(2019年2期)2019-07-24
活力(2019年22期)2019-03-16
电子制作(2018年8期)2018-06-26
杭州(2016年1期)2016-08-15
风能(2016年3期)2016-07-05
汽车零部件(2014年2期)2014-03-11
