
动态补偿环节在核电厂控制系统中的应用探究
2022-02-18 02:13陈银萍余德诚
仪器仪表用户 2022年2期
陈银萍,余德诚
(中国核电工程有限公司,北京 100840)
0 引言
三代核电采用先进的数字化控制系统(包括非安全级电厂控制和安全级保护系统)为整个电厂提供启动、升功率、功率运行、停堆和换料期间的全面控制,为电厂的非正常状态提供监视和保护。“华龙一号”是国内自主研发的三代核电机组,其首堆工程的仪控系统采用全数字化DCS系统并采用技术较为成熟的TXS 平台(安全级)和T2000平台(非安全级)[1]。AP1000 电厂非安全级控制系统基于Ovation 平台实施,可实现核蒸汽供应系统(NSSS)的控制,NSSS 五大控制功能包括:功率控制、稳压器液位控制、稳压器压力控制、蒸汽发生器水位控制、蒸汽旁排控制。AP1000 的NSSS 控制策略在设计过程中进行了动态模型分析,从而确保了系统在整个电厂运行期间获得良好的动态响应特性[2]。保护和安全监测系统基于Common Q 平台实施,为电厂的正常运行提供必要的保护,并具有电厂停堆功能,可以将电厂维持在安全停堆工况下。当电厂运行工况超出安全限制时,保护和安全监测系统可提供自动的反应堆停堆、手动反应堆停堆和汽轮机停机功能;提供专设安全设施驱动功能,减轻设计基准事故的后果;提供安全级设备事故期间和事故后监测功能并显示[3]。在电厂控制系统的五大控制功能的逻辑实现及保护和安全监测系统控制和保护功能实现时,会使用大量的动态补偿环节对传感器信号或过程信号进行处理,其中3 种最常用的动态补偿方案包括:滞后环节(Lag)、超前-滞后环节(Lead-Lag)和速率环节(Rate-Lag)。动态补偿电路(软件)配置(以算法形式)用来克服一些伴随控制过程而产生的时间因子。在工业应用中常见的时间因子类型包括噪音、管道传输的延迟、仪表自身响应因素等。过程控制系统使用动态补偿去克服仪表的自身局限性,以及工艺系统对控制系统的各种影响。控制器本身可以实现一些动态补偿,例如:积分和微分控制环节。某些情况下,在过程变量送往控制器之前或为了在信号送往表决电路前,对其进行保护都需进行动态补偿。
对3 种常用的动态补偿环节进行理论分析及仿真,总结了每种环节的作用,组态时注意事项,特别对速率环节与整定值直接关系进行分析。对电厂工作人员提供了指导,使其了解3 种动态补偿环节的作用并在后续电厂相关变更工作中关注每种动态补偿环节的时间常数的设置。时间常数设置不同,动态补偿环节的响应不同,时间常数设置不合理,会影响系统的控制精度,甚至会影响系统的稳定性。
1 动态补偿环节分析及仿真
动态补偿环节通常用他们的传递函数表示。在控制逻辑图中,这几种算法的显示样式很相似,故通过算法的传递函数判断动态补偿类别很重要。本节将逐个示意每种类型动态补偿环节的传递函数,并通过拉普拉斯变换对3 种常见动态补偿环节进行理论推导,得到3 种动态补偿环节输出的时域时变函数。此外,通过MATLAB 数学分析软件分别仿真了3 种动态补偿环节在不同输入下的响应,直观地展示了不同输入和不同时间常数对动态补偿环节输出的影响,仿真结果与理论推算结论一致。
1.1 滞后环节(lag)
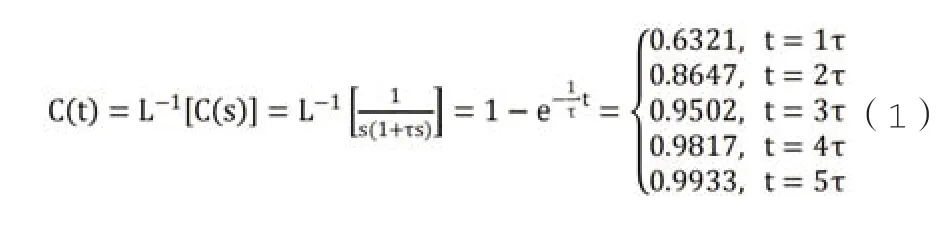
对输出函数进行拉普拉斯(Laplace)逆变换,得到时域下的输出C(t):
通过MATLAB 仿真软件对滞后环节进行仿真,在不同输入下,滞后环节的输出仿真结果如下:
1)在脉冲输入下仿真结果见图1,仿真参数如下:脉冲宽度=0.1s;绿色线为时间常数τ=1 时的输出;红色线为时间常数τ=5 时的输出。

图1 脉冲输入滞后环节响应Fig.1 Pulse input lagging link response
2)输入加入噪声的仿真结果见图2。蓝色线为阶跃输入加扰动;绿色线为时间常数τ=1 时的输出;红色线为时间常数τ=4 时输出。

图2 带有扰动的阶跃输入下滞后环节响应Fig.2 The response of the hysteresis link under the step input with disturbance
由计算结果及仿真结果可以看出,滞后环节可过滤输入信号并在输入信号之后延迟输出,其对滤除电路噪音或实际过程中的噪音(或扰动)十分有用,延迟时间常数τ决定了滤波功能的效果和动态响应。滞后环节普遍用于减少(滤除)过程中产生的噪音,例如:在一些流体系统中需要监测的流量很高,来自于这些监测的现场传感器信号中经常夹杂噪音。
1.2 超前-滞后环节(lead-lag)
单位阶跃输入时域函数为:r(t)=1(t),单位阶跃的传递函数为:。阶跃输入下,超前-滞后环节的输出的传递函数为
对超前-滞后环节输出的传递函数进行拉普拉斯(Laplace)逆变换,得到时域下超前-滞后环节的输出C(t):
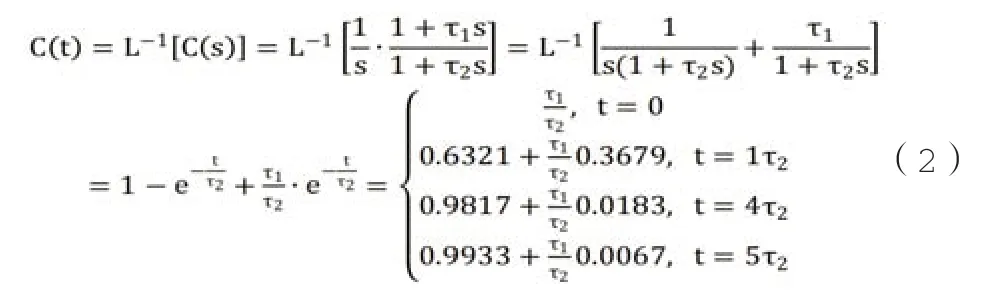
由式(2)所示,超前-滞后环节结合了滞后环节的噪音抑制功能与提前预判(超前)输出功能,输出中的超前部分设计可克服某些系统延迟,诸如回路传输延迟。超前与延迟部分的时间常数都是LEADLAG 算法的参数,通过调整(或整定)这些参数从而调整控制回路的动态响应,达到补偿系统某些品质的作用。注意超前滞后环节在阶跃输入变化的瞬间具有快速垂直的响应,这正是动态响应中超前环节的作用体现。一旦输入阶跃变化完成,输出中的超前部分经过5 个时间常数的衰减后作用消失。
1.3 速率环节(rate-lag)
单位阶跃输入时域函数为:r(t)=1(t),单位阶跃的传递函数为阶跃输入下,速率环节的输出传递函数为
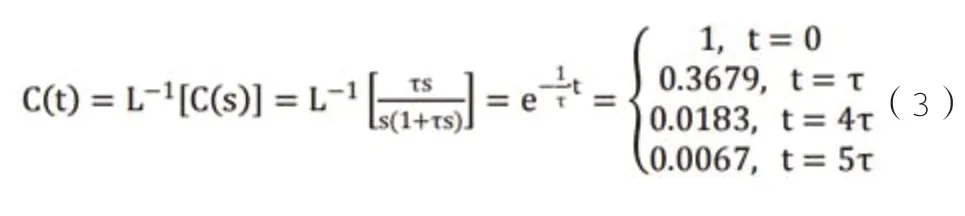
对上式进行拉普拉斯(Laplace)逆变换,得到时域下速率环节的输出C(t):
斜坡输入的时域函数为:r(t)=kt,斜坡输入的传递函数为斜坡输入下速率环节输出的传递函数为:
对上式进行拉普拉斯(Laplace)逆变换,得到时域下的输出C(t):

随着时间 t 的增加,有:

由式(5)可以看出,速率环节的时域响应随着时间的增加,约5 倍时间常数后,输出为常数,仅与斜率k 和时间常数τ 的设置有关。对速率环节在不同输入下的动态响应进行仿真如:在斜坡输入下速率环节输出响应的仿真结果如图3 所示。仿真参数:斜率k=3,绿色线为τ=1 时输出;红色线为τ=4 时输出。在单位阶跃输入下速率环节输出响应的仿真结果见图4。仿真参数:单位阶跃输入,绿色线为τ=1 时速率环节输出;红色线为τ=4 时速率环节输出。
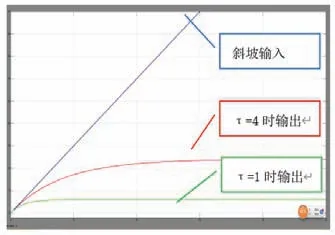
图3 斜坡输入下速率环节输出Fig.3 Rate link output under ramp input

图4 阶跃输入下速率环节输出Fig.4 Rate link output under step input
速率环节的设计是为了补偿输入信号的变化率(微分),在稳态(Steady-state)系统中速率环节的输出为0,如图4 所示。对于线性输入,速率环节的输出最终稳定在某个常数,如图3 所示。
2 动态补偿环节的应用分析及设计时注意事项
本节依据动态补偿环节的计算及仿真结果,并结合AP1000 三代核电厂控制系统中(电厂控制系统、保护和安全监测系统)所使用的3 种动态补偿环节,对动态补偿环节的作用进行说明和总结,从而为电厂工作人员提供指导。
2.1 滞后环节
从推导结果式(1)及仿真图1、图2 可以总结出:1)其在输入后延迟输出,对于阶跃输入,约5 倍时间常数(5τ)后输出基本跟踪上输入。在计算堆芯功率时,对于在冷段安装的传感器,要通过滞后环节补偿冷却剂从冷段传输到堆芯的传输时间;2)滞后环节可用来减少(滤除)过程中产生的噪音(见图2),将更为真实的、质量更好的信号送到控制器,提高控制品质。在控制系统的压力、液位等控制中,常采用滞后环节克服现场传感器信号中夹杂的噪音,如:蒸汽发生器宽量程液位、汽机冲动级压力等信号都先通过滞后环节滤波后再进行后续计算。滞后环节的时间常数决定了其滤波能力:τ 越大,抗噪音效果越好,但同时延时也越大,对系统稳定性越不利;3)可避免假信号导致的逻辑误触发,滞后环节对于假信号(信号波动导致的短时信号高等)的响应如图1 所示,输出幅值远低于输入幅值,不会触发双稳态逻辑。
电站在后续变更时,要特别注意,对于噪音较大或者传感器安装位置与所需变量间存在管道传输延时等情况需使用滞后环节,并根据现场实际调节时间常数(τ),要避免延时过大对系统造成的不稳定。
2.2 超前-滞后环节
超前-滞后环节结合了滞后环节的噪音抑制功能与提前预判(超前)输出功能,超前部分(即传递函数的分母部分)的设计为克服某些系统延迟,如回路传输延迟。同样,以堆芯功率为例,安装于热段的传感器,冷却剂从堆芯流至热段存在管道传输延时,因此需克服此部分延时。蒸汽发生器液位控制也应用了超前-滞后环节。蒸汽发生器液位控制的主给水阀控制有两种给水控制模式:高功率模式和低功率模式。在高功率控制模式下,蒸汽发生器液位整定值与窄量程液位测量值的偏差经过函数处理,同时蒸汽流量与主给水流量的偏差经函数处理后,两者之和再经比例积分微分调节器计算出高功率下的给水流量需求。在低功率控制模式下,根据汽轮机冲动级压力计算出蒸汽发生器液位设定值,与蒸汽发生器窄量程液位测量值进行偏差比较,同时使用蒸汽发生器宽量程液位与宽量程液位设定值的偏差作为前馈,通过比例积分环节计算出给水流量需求[4]。在此控制过程中,蒸汽发生器窄量程液位经滞后环节和超前滞后环节滤波对信号处理。此外,电站调试或电厂运行后开展设计变更时,若涉及超前滞后环节对信号进行滤波,要特别注意时间常数(τ1、τ2)的选取。从式(2)可以看出,当τ1>τ2 时,主要表现为超前作用,主要用于克服系统延时,但抗干扰能力差。当τ1<τ2 时,主要表现为滞后作用,对过程噪音、干扰有过滤作用。
2.3 速率环节
速率环节的设计是为了补偿输入信号的变化率(微分),在稳态系统中速率环节的输出为0。注意与超前滞后环节传递函数分子、分母上的τ 表示两个不同的时间常数所不同的是,速率环节传递函数分子上的τ 和分母上的τ 是同一个参数。当需要对输入信号的变化率进行响应,并在系统稳态时响应输出为0,这时使用速率环节补偿功能。速率环节的阶跃响应见式(3),稳态时输出为0。
由式(4)可得:对于线性输入,速率环节的输出随时间逐渐增加到一个常数值(即:输入斜率乘时间常数(k*τ),见式(5)及图 3)。在某三代核电厂整定值清单中,会有如:功率量程正变化率高(12%RTP,时间常数60s)这类整定值,不易理解。此类整定值,从推导式(4)和式(5)可以看出,其整定值中的时间常数就是速率环节中的时间常数τ。也就是说,功率正变化率k×时间常数τ(60s)=12%,即:变化率低于12%/min 时,不会触发功率量程正变化率高停堆。操作员、设计工程师需关注此含义,即:此类整定值与组态中的时间常数有关系。
3 总结
通过对3 种动态补偿环节,即:滞后环节(Lag)、超前-滞后环节(Lead-Lag)、速率环节(Rate-Lag)进行理论计算并通过MATLAB 仿真,展示了动态补偿环节的响应输出响应。最后,归纳了在核电厂过程控制中3 种动态补偿环节的应用场合、作用及注意事项,对电厂工作人员有一定指导意义,为华龙后续机组设计提供了一定参考。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
内蒙古电力技术(2022年1期)2022-03-18
化工自动化及仪表(2021年6期)2021-11-26
水泥工程(2020年4期)2020-12-18
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
海峡科技与产业(2017年12期)2018-01-18
