
Refining tickler chains for penaeid trawls
2022-02-18 09:37MattBroadhurst
Aquaculture and Fisheries 2022年1期
Matt K. Broadhurst
a NSW Department of Primary Industries, Fisheries Conservation Technology Unit, National Marine Science Centre, Southern Cross University, 2 Bay Drive, Coffs Harbour, NSW, 2450, Australia
b Marine and Estuarine Ecology Unit, School of Biological Sciences, University of Queensland, Brisbane, QLD, 4072, Australia
Keywords:Ground gear Penaeid Selectivity Tickler chain Trawling
ABSTRACT Tickler chains are simple additions to the ground gears of benthic trawls that can improve the catches of some target species, albeit with considerable variability. The purpose of this study was to decipher some of the technical variability associated with tickler chains used with generic, paired trawls targeting school prawns,Metapenaeus macleayi. In the first of two experiments, single tickler chains were either attached between the trawl otter boards or the wing ends and compared against each other and a control trawl (no tickler chain).Attaching the tickler chain to the otter boards significantly reduced wing-end spread and the trawled area without significantly affecting catches of school prawns. By comparison, attaching the tickler chain to the wing ends maintained spread and resulted in significantly more school prawns being caught (by 1.11 ×) than in the control trawl, and also fewer numbers of one teleost species, pink-breasted siphonfish, Siphamia roseigaster. In experiment two, a single tickler chain was compared against one with multiple chains and one with a double chain; all attached at the wing ends. Trawls with the multiple- and double-tickler chains had the same wing-end spread as those with the single tickler chain, while retaining up to 1.17 × more school prawns, and for the double-chain tickler, 45% fewer southern herring, Herklotsichthys castelnaui. The results are attributed to mechanical and visual stimuli affecting school prawns and some fish, respectively, and support maximising the surface area of tickler chains within the wing ends as a means for improving penaeid-trawl species selectivity without affecting swept area.
1. Introduction
Penaeid trawling is historically important to the fishing economies of>25 countries throughout the tropic-temperate zone (Deshpande &Kartha, 1967; Seidel & Watson, 1978; Broadhurst et al., 2000; Silva et al., 2013). However, this fishing method is acknowledged for some environmental concerns; mostly involving poor selectivity because of the small mesh sizes required and use in nearshore areas coinciding with often large and diverse assemblages of small fish which are also caught,but discarded (Andrew & Pepperell, 1992). A large component of this discarded ‘bycatch’ dies, which represents wasted resources (Broadhurst, 2000; Broadhurst et al., 2006).
Another potential resource issue associated with penaeid trawling is unaccounted fishing mortality of the targeted penaeids, owing to gear contact and then escape (Watson, 1976; Goeden et al., 1990). While there are fewin situstudies, there is some consensus that like most benthic trawls, penaeid trawls are considerably <100% effective for catching all targets that contact the ground gear, with at least some damaged as they pass under, or collide with components (Goeden et al.,1990; McHugh et al., 2017). Irrespective of associated mortalities,ideally to maximise economic return, a trawl would retain most of the targeted organisms encountered for any given swept area.
Technical solutions have been proposed to increase the swept-area efficiencies of penaeid trawls, with early efforts focusing on groundgear modifications and especially using electricity (Watson, 1976;Seidel & Watson, 1978; Namboodiri et al., 1977). Purpose-built ground gears were tested for their utility in forcing penaeids on or in the substrate to involuntarily contract their abdomens via electrical stimuli and propel themselves upwards into the path of a trawl, rather than mechanically stimulating them via traditional ground gears (Watson,1976). Seidel and Watson (1978) sought to combine electrified ground gears with other anterior modifications that precluded fish entering the trawl. While some fisheries subsequently tested and adopted electric penaeid trawls, concerns over electrifying other benthic biota precluded their use in many countries (e.g. Namboodiri et al., 1977; Yu et al.,2007).
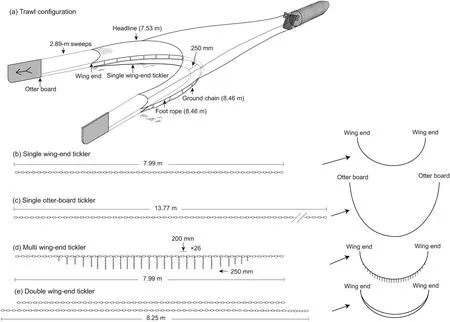
Fig. 1. Schematic diagram of (a) double-rigged trawl with a tickler chain attached, and the (b) single wing-end, (c) single otter-board, (d) multi wing-end, and (e)double wing-end tickler chains.
Other methods for increasing trawl catchability for penaeids, while minimising or even reducing collateral species impacts involves modifications within existing ground-gear configurations (Broadhurst et al., 2015). One approach is to install so-called light ‘tickler chains’,either between the trawl otter boards (and sweeps) or the wing ends,that contact the substrate anterior to a heavier ground chain, but still beneath the overhang of the upper panel (termed ‘lead-ahead’) (Deshpande & Sivan, 1962; Deshpande & Kartha, 1967; Watson et al., 1984;Broadhurst, 2020, Fig. 1a). Ticker chains mechanically stimulate some penaeids to contract their abdomen and propel themselves upwards into the upper panel and eventually the trawl, and before some remaining conspecifics are similarly stimulated by the ground gear (Goeden et al.,1990).
While installing tickler chains in front of heavier ground chains intuitively might evoke concerns over increased seabed contact and impacts (reviewed by Hiddink et al., 2017), the benthic footprints of penaeid trawls are minimal compared to other mobile gears (like fish-trawls and dredges) and mostly determined by the spreading mechanisms (McHugh et al., 2017). Specifically, during one applied experiment, McHugh et al. (2020) demonstrated that conventional penaeid-trawl ground gears made from either 6-, 8- or 10-mm chain (and encompassing a threefold difference in weight) all similarly displaced only 3–5% of the least resistant habitats, with nearly all habitat displacement caused by the otter boards (irrespective of the ground gear). Including even light tickler chains in front of such conventional penaeid-trawl ground gears would likely have few measurable effects on the seabed.
Despite their widescale use, there are few empirical studies assessing tickler chains in penaeid-trawl fisheries, and some conjecture over their utility. More specifically, there are concerns they increase the bycatches of other crustaceans (Chittenden & van Engel, 1972) and benthic teleosts (Goeden et al., 1990). Conversely, other studies have shown species-specific (e.g. Broadhurst, 2020) or broader (Deshpanbe & Sivan,1962; Deshpande & Kartha, 1967) reductions in teleost bycatch. Variable tickler-chain performances may reflect fishery-specific taxa and/or trawl-rigging arrangements and justify ongoing work to assess key affecting factors, simply because any improvement in penaeid catches should be achieved without negatively affecting species selectivity.
Considering the above, using an Australian penaeid-trawl fishery as a case study, the objectives here were to first determine if the attachment points of a generic ticker chain at either the wing ends or the otter boards affected catching and engineering performances. The second objective was then to assess whether species selectivity could be improved by increasing the surface area of the tickler chains anterior to the ground gear (and so stimulate more penaeids).
2. Materials and methods
Two experiments were completed during February 2020 onboard a double-rigged trawler (10 m with an 89-kW engine) fishing across sandy/mud substrata at depths of 2–7 m in the Clarence River/Lake Wooloweyah system (29◦26 S 153◦22 E) NSW, Australia. The trawler had two winches with 12-m bridles (6-mm Ø stainless wire) attached to paired, stainless-steel otter boards (53.00 kg; 108.00 ×0.73 m) (Fig. 1a).Onboard electronic equipment included a Notus trawl-monitoring system to monitor wing-end spreads (m); an echosounder to measure depth(m); and a global positioning system (GPS; Lowrance) to measure speed over the ground (SOG; ms−1).
2.1. Trawls and four tickler chains
Two identical two-seam trawls (nominal 38-mm stretched mesh opening; SMO and 1.10-mm Ø braided polyethylene–PE twine) were used, with both panels orientated so the knots provided positive lift(Broadhurst et al., 2016). The trawls had headline and footrope lengths of 7.53 and 8.46 m, respectively creating 12 meshes of lead-ahead, and were attached to sweeps (2.89 m) via snap clips at the wing ends (Fig. 1a and see Broadhurst, 2020 for a trawl plan). The footropes were attached to 8-mm Ø stainless-steel chain via 114-mm drops (6-mm Ø chain in 32-mm Ø plastic tubing spaced 550–600 mm apart) and for a total weight of 13.00 kg (Fig. 1a). Both trawls had extension sections made from nominal 41-mm SMO PE mesh and measuring 100 ×30 meshes inthe transverse and normal directions, respectively. Each extension had a Nordmøre-grid (BRD with 20-mm bar spaces) installed and was attached to a T45 codend made from nominal 27-mm mesh and measuring 120 ×75 bars (Fig. 1a).
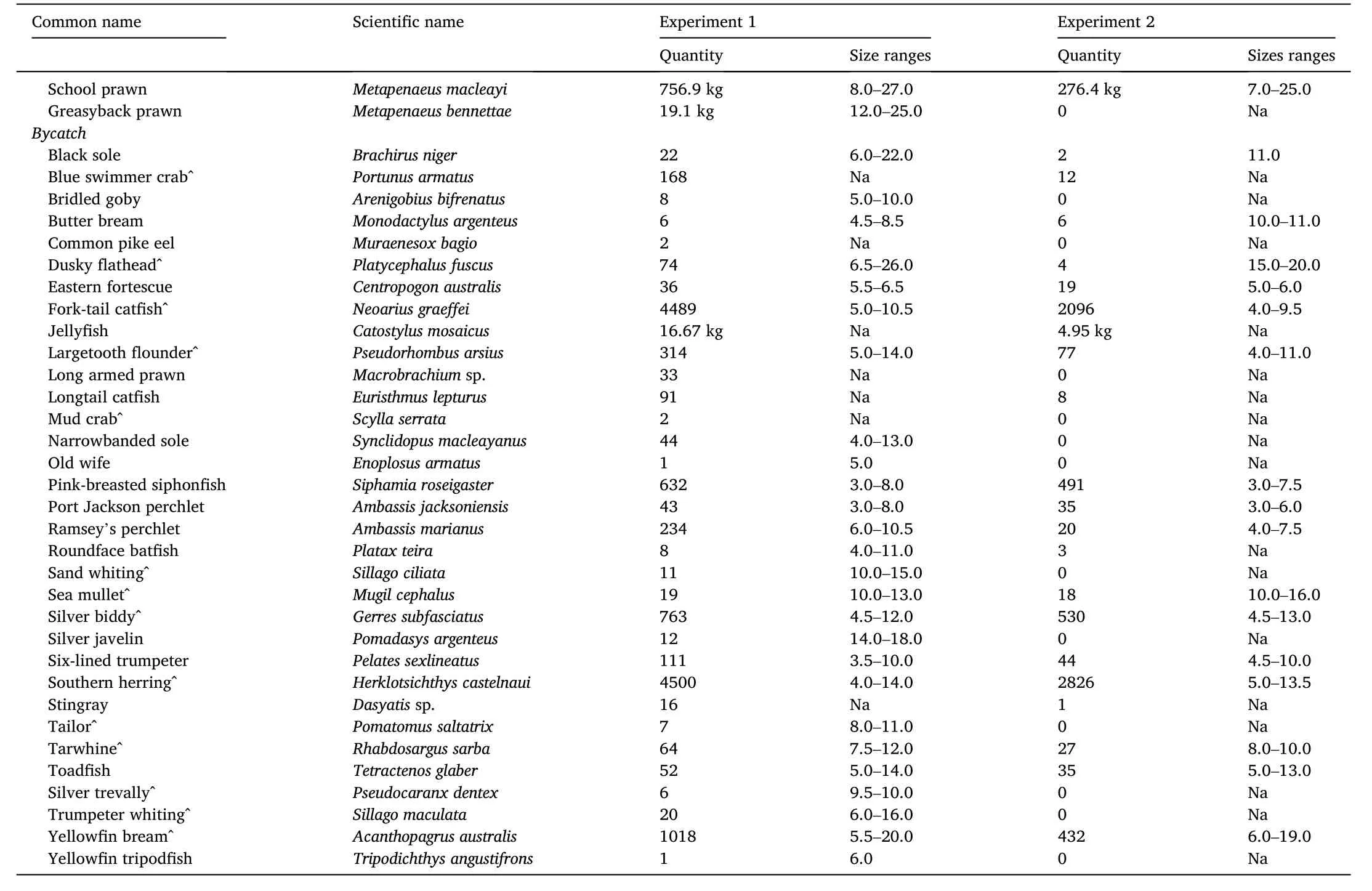
Table 1 Common and scientific names, quantities (numbers, unless stated otherwise) and sizes of organisms (in alphabetical order of common name) caught during the two experiments. Sizes were carapace length in mm for penaeids and total length in cm for fish. Na means the species were not measured. ^economically important in other fisheries.
Four treatment tickler chains were constructed from 4-mm Ø chain;each with snap clips at either end to facilitate attaching to the trawls(Fig. 1b–e). The first treatment (‘single wing-end tickler’; 2.28 kg)measured 7.99 m and was clipped to the ends of the 8.46-m ground chain so that it contacted the bottom at ~250 mm anterior to the centre of the ground chain during typical wing-end spreads, or midway beneath the lead-ahead (Fig. 1a and b). The second tickler chain(‘otter-board tickler’; 3.93 kg) measured 13.77 m and was hypothesised to occupy the same relative distance at the trawl (7.99 m) as the single-wing tickler, but was clipped to the lower posterior edge of the otter boards (hence the additional 5.78 m to account for the sweep lengths; Fig. 1c). The third treatment (‘multi wing-end tickler’; 3.30 kg) was 7.99 m long and had 26 lengths (up to 250 mm long) of 3-mm Ø chain attached at 200 mm apart along its mid length, which were designed to orientate posteriorly and parallel to the tow direction(Fig. 1d). The fourth treatment (‘double wing-end tickler’; 4.50 kg)comprised two chains at 7.99 and 8.25 m, so they orientated ~250 and 125 mm anterior to the centre ground chain at typical wing-end spreads (Fig. 1e).
2.2. Experimental designs and data collected
Prior to fishing, fifteen replicate meshes were measured for SMO (to the nearest 1 mm) in each of the two trawls, extensions and codends using a local, purpose-built gauge with constant tension. The treatment tickler chains were then assessed in two experiments. In the first experiment (done at two separate locations within the fishery), the single wing- and otter-board ticklers were tested against a trawl with no tickler (control) to investigate the most appropriate attachment point(wing-end vs otter boards). Based on the Results (below), the second experiment (at one location only) involved comparing the single, multi and double wing-end tickers.
Irrespective of the experiment, at the start of each fishing day the Notus paired wing-end sensors were secured to the trawl wing ends (at the headline) and either one of the treatments (or control in experiment 1) was randomly selected and secured to each trawl. The double configuration was then deployed for 40 min mostly in straight lines, but including at least two turns (taking ~2 min each), after which treatments (or the control) and their sides of the vessel were reassigned as required, and the process repeated for up to eight deployments each day(between 07:00 and 15:00). At the end of each day, the Notus sensors were swapped from side-to-side. The above procedure was repeated for 24 or 25 replicate deployments of the control and single otter-board and wing-end ticklers over six days in experiment 1, and eight to tenreplicates of the single, multi and double wing-end tickers during two days in experiment 2.

Table 2 Summaries of Wald F-statistics from linear mixed models (LMM) assessing the importance of the fixed effects of ground-gear configuration in experiments 1 (control v single wing-end v single otter-board tickler chains) and 2 (single vs double v multi wing-end tickler chains) for explaining variability among technical and biological responses (with catches as 40-min −1 deployment unless stated otherwise). Excluding the mean carapace lengths (CL) of school prawns, Metapenaeus macleayi and total lengths (TL) of southern herring, Herklotsichthys castelnaui all numbers and weights (kg) were log-transformed. Random effects are described in the text. –, not caught or insufficient data for model.
Technical data collected during each deployment included the: (1)depth; (2) SOG; (3) distance trawled (otter boards on and off the bottom—obtained from the plotter and Notus trawl-monitoring system);and (4) the wing-end spreads (in m recorded at 1-min intervals). The latter two variables were used to calculate ha trawled.
Biological data collected from each deployment included the total weights of penaeids and bycatch (to the nearest 10 g), the numbers of all other bycatch species, and the total lengths (TL to the nearest 5 mm) of the most abundant teleosts. Random samples of ~150 g (~80 individuals) of penaeids were collected from each trawl, placed into plastic bags and transferred to the laboratory where samples were separated into species, weighed and measured (CL to the nearest 1.0 mm). These data were used to calculate mean CLs for relative deployments.
2.3. Statistical analyses
The hypothesis of no differences in the nominal SMOs of the two trawls, extensions and codends was tested using linear models (LM). In each experiment, data describing key engineering and biological variables were analysed using linear mixed models (LMMs). Catch variables with sufficient replication across deployments were analysed as both absolute (40-min−1deployment) and standardised (ha−1trawled) and then log-transformed so differences between treatments were modelled to act multiplicatively, rather than additively. Technical data and mean CLs of school prawns and TLs of the most abundant fish affected by the tickler chains were analysed raw.
In both experiments, all LMMs included ‘ground-gear configuration’as a fixed factor while ‘location’ (experiment 1 only), ‘sides of the vessel’, ‘days’ and ‘deployments’ (within locations and days) were random. For the LMMs assessing wing-end spread, Notus sensor was an additional random factor, and SOG and depth were included as additional fixed effects, and the most appropriate model (fixed terms) chosen using the lowest Akaike information criterion. The LMMs were fitted using the ASReml package of the R statistical language and significance determined using a WaldF-test. Where the null hypothesis was rejected,false-discovery-rate pairwise comparisons were used to separate treatments. Predicted mean numbers and weights of interest (40-min−1deployment) were obtained by back-transforming log-predictions from the LMMs and are presented with raw means and SEs.
3. Results
The two trawls, extensions and codends had the same SMOs, with overall means (±SE) of 37.90 (±0.10), 41.40 (±0.20) and 27.30 (±0.10)mm, respectively (LM,p>0.05). The paired trawls were fished for totals of 74 and 26 deployments in experiments 1 and 2 at mean ±SE SOGs of 1.37 ± 0.01 and 1.38 ± 1.01 ms−1, and caught 776 and 276 kg of penaeids, respectively; virtually all of which were school prawns(Table 1). Bycatches in each experiment were 126 and 56 kg and included 32 and 20 species, respectively. However, 95% of bycatches in both experiments comprised ten and six species of small fish (mostly<10–18 cm TL); the numbers of which formed the basis of biological analyses below (Table 1).

Fig. 2. Differences in predicted (black histograms) and in raw (+SE; white) catches 40-min−1 deployment between trawls rigged without or with the single otter-board or wing-end tickler chains for the weights of total (a) school prawns, Metapenaeus macleayi, and (b) bycatch and the numbers of (c) southern herring, Herklotsichthys castelnaui and (d) pink-breasted siphonfish,Siphamia roseigaster. Letters above predicted means indicate significant differences (or otherwise) detected in false-discovery-rate pairwise comparisons (p < 0.05).

Fig. 3. Carapace-length (measured) frequencies of school prawns, Metapenaeus macleayi (a, c and e) and southern herring, Herklotsichthys castelnaui (b, d and f)retained in trawls without (control) or with the single otter-board or wing-end tickler chains. n, number measured.
3.1. Experiment 1: control vs single otter-board vs single wing-end tickler chains
The final LMM for wing-end spread was reduced to a significant effect of ground-gear configuration (p< 0.01, Table 2) and a nonsignificant effect of depth (p> 0.05). The area trawled was also significantly affected by ground-gear configuration (LMM,p<0.01; Table 2). Falsediscovery-rate pairwise comparisons revealed trawls with the single otter-board tickler chain were spread less and swept a lower area (predicted means ±SE 4.17 ±0.35 m and 1.35 ±0.10 ha) than either those with the single wing-end tickler chain (4.28 ±0.35 m and 1.39 ±0.10 ha) or the control (4.26 ±0.35 m and 1.39 ±0.10 ha)—which were not significantly different to each other (p>0.05).
The LMMs for catches detected significant effects of ground-gear configuration for the standardised (ha−1trawled) and absolute (40-min−1trawled) weights of school prawns (but not their mean CLs), and the numbers of southern herring and pink-breasted siphonfish (p<0.05;Table 2; Fig. 2a, c and d and 3). False-discovery-rate pair-wise comparisons were consistent between data treatments and so only absolute catches are presented in Fig. 2. Compared to the control, only the single wing-end tickler chain significantly increased the catches of penaeids(by 1.11 ×), while trawls with both tickler chains retained fewer pinkbreasted siphonfish,Siphamia roseigaster(by 42 and 36%), but only the single otter-board tickler chain significantly so (predicted mean reduced by 42%; FDR,p<0.05; Fig. 2a and d). The mean sizes of school prawns were consistent between trawls at 16.40 ±0.59 to 16.52 ±0.59 mm CL(LMM,p>0.05, Fig. 3a, c and e).

Fig. 4. Differences in predicted (black histograms) and in raw (+SE; white)catches 40-min−1 deployment between trawls rigged with the single, multi and double wing-end tickler chains for the weights of total (a) school prawns,Metapenaeus macleayi and (b) bycatch and the numbers of (c) southern herring,Herklotsichthys castelnaui. Letters above predicted means indicate significant differences (or otherwise) detected in false-discovery-rate pairwise comparisons(p < 0.05).
The trawls rigged with the single otter-board tickler chain also caught significantly more southern herring,Herklotsichthys castelnauithan those with the single-wing tickler chain ( ×1.85) (FDR,p<0.05),but not the control (FDR,p>0.05, Fig. 2c). The mean sizes of southern herring were consistent among the three trawls at 9.01 ±0.26 to 9.19 ±0.26 cm TL (LMM,p> 0.05, Fig. 3b, d and f). There were no other significant effects of ground-gear configuration, but the mean weight of bycatch was slightly lower in trawls with the single wing-end tickler chain than either the control (by 17%) or those with the single otterboard tickler chain (by 14%; LMM,p>0.05; Fig. 2b).
3.2. Experiment 2: single-vs multi-vs double wing-end tickler chains
There were no significant differences among trawls with different ground-gear configurations for wing-end spread (only fixed term) or area trawled (LMM,p> 0.05; Table 2). Specifically, trawls with the single, multi and double wing-end tickler chains were spread at 4.00 ±0.10, 4.07 ±0.11 and 4.02 ±0.11 m and covered areas of 1.35 ±0.03,1.35 ±0.03 and 1.37 ±0.03 ha, respectively.
Significant catch effects of ground-gear configuration were limited to the standardised and absolute weights of school prawns and the standardised numbers of southern herring (LMM,p< 0.05), although thepvalue for absolute catches of the latter species was 0.05 (Table 2, Fig. 4a and c). False discovery rate pairwise comparisons revealed trawls rigged with the multi and double wing-end tickler chains caught 1.17 and 1.09×more school prawns than the single wing-end tickler chain (p<0.05,Fig. 4a), but across similar-sizes with predicted means of 14.45 ±0.25 to 14.64 ±0.27; (LMM,p>0.05; Fig. 5a, c and e). Compared to trawls with the single wing-end tickler chain, those with the double wing-end tickler retained 45% fewer southern herring among standardised catches(predicted mean; FDR,p< 0.05) and although not significant, 49%fewer for the absolute catches (Fig. 4c). The mean sizes of southern herring remained similar among trawls at 9.07 ±0.24 to 9.34 ±0.25 cm TL (LMM,p> 0.05, Fig. 5b, d and f). There were no other significant differences (LMM,p>0.05; Table 2).
4. Discussion
This data here support the utility of tickler chains for improving trawl catching efficiency (by >10%) for penaeids (Deshpanbe & Sivan,1962; Deshpanbe & Kartha, 1967; Chittenden & van Engel, 1972;Watson et al., 1984; Goeden et al., 1990; Broadhurst, 2020). It is also clear that trawl species selectivity and engineering performance are affected by subtle changes in tickler-chain rigging arrangements. The technical and biological mechanisms supporting such variation can be hypothesised and used to recommended future tickler-chain refinements.
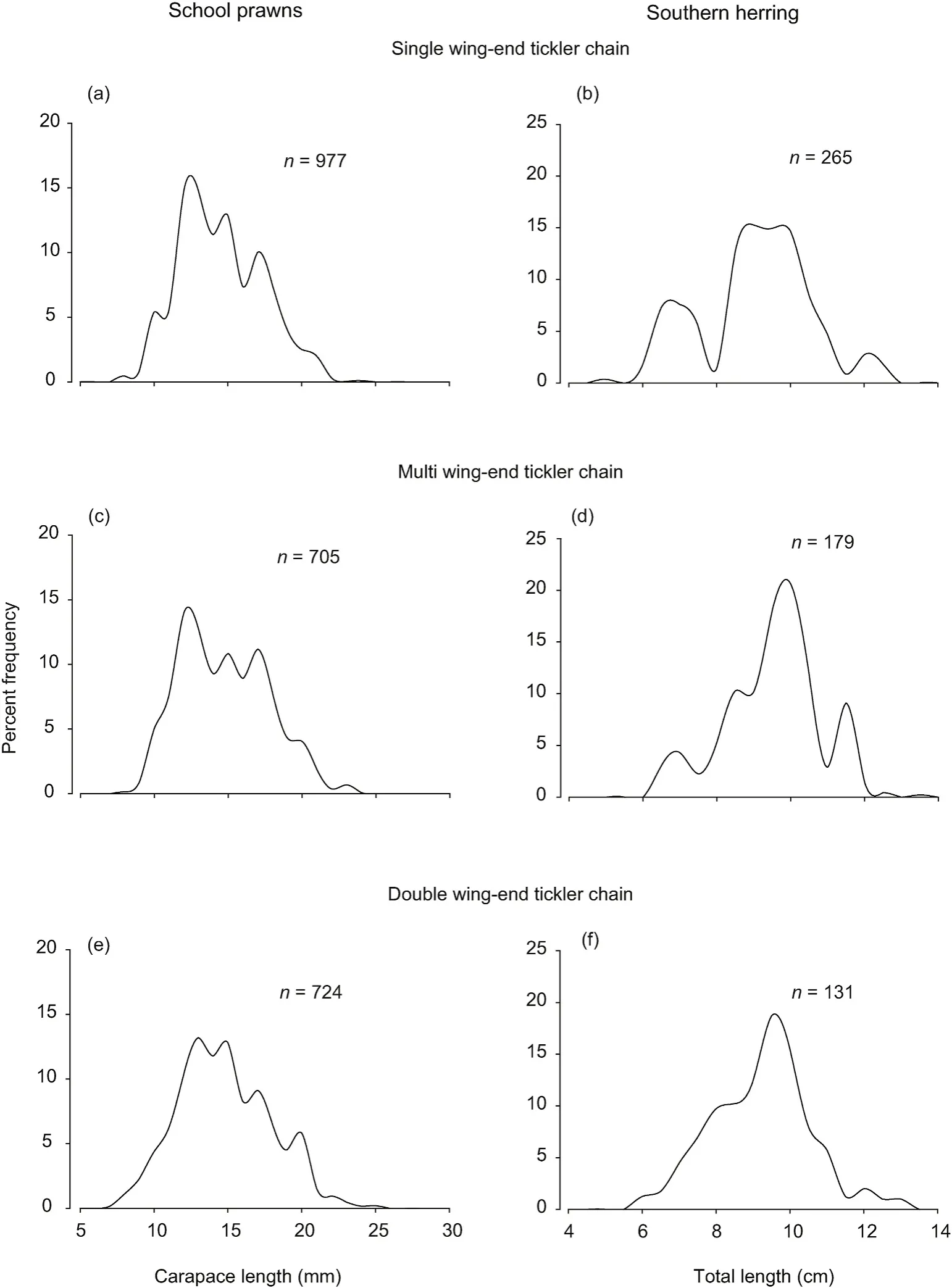
Fig. 5. Carapace-length (measured) frequencies of school prawns, Metapenaeus macleayi (a, c and e) and southern herring, Herklotsichthys castelnaui (b, d and f)retained in trawls with the single, multi and double wing-end tickler chains. n, number measured.
In terms of trawl-engineering performance, only the single otterboard ticker chain had a negative impact, reducing predicted mean wing-end spread by ~10 cm, or <3% compared to control trawls(without a tickler chain) or those rigged with the single wing-end tickler chain. It is unlikely the lower wing-end spread was caused by the single otter-board tickler chain’s greater weight, which although 2 kg more than the single wing-end tickler chain, was still 2 kg less than the double wing-end tickler chain (which did not affect wing-end spread in experiment 2). Rather, the additional bottom contact of the single otterboard tickler chain extending the length of the sweeps (i.e. 2.89 m past the wing ends) to the base of the otter boards probably increased drag(via ground shear). Any irregularities in the substrate would independently affect the single otter-board tickler along its length and possibly wing-end spread. In contrast, while heavier and with a greater surface area, the double wing-end tickler comprised two chains, with the second immediately following behind the first. Broadhurst (2020) similarly,showed no significant difference in wing-end spreads between ground chains made from 8- or 10-mm Ø wire and with or without the single-wing-end ticker, despite increases in surface areas and weights ranging from 13.00 to 20.20 kg.
The relative orientation of the single otter-board tickler chain to the sweeps and trawl on the substrate remains unknown, but based on the biological data, this may not have followed the same position relative to the ground chain as the wing-end tickler chains. Unlike for the wing-end tickler chains, there was no increase in catches of school prawns.Possibly, the single-otter board ticker had variable relative orientations(e.g. as the vessel turned; at least twice during each deployment) and at times was behind the sweeps or ground chain near the wing end. It so,any stimulated school prawns may have missed the trawl mouth. In contrast, attaching the tickler chain directly to the ground chain at the wing ends would have ensured geometrical symmetry and anteriorly maintained the tickler chain throughout as first point of contact for many school prawns. Certainly, increasing the area of tickler chains at this attachment position, via either short multiple perpendicular chains,or a second posterior chain significantly increased catches of school prawns.
In addition to school prawns, southern herring was also significantly affected by the tickler-chain configuration in both experiments, and with variable results that tended to fewer individuals in trawls with wing-end tickler chains as their surface areas increased. In the same fishery, Broadhurst (2020) observed significantly lower catches of this species in trawls with the single wing-end tickler than without, and attributed this to a visual response to substrate disturbance, similar to that proposed by Melli et al. (2018) for so-called ‘counter herding devices’ and based on the reaction of this species to other anterior trawl stimuli (McHugh et al., 2015). While statistical significance against the control was not attained here in experiment 1, trawls with the single wing-end tickler chain caught significantly fewer catches of southern herring than those with the single otter-board tickler chain, although this probably reflects more herding by the latter between the wing ends and otter boards. In support of a strong behavioural response to the wing-end tickler chains, trawls with the double wing-end design caught 45% fewer southern herring than those with the single wing-end tickler chain, and possibly because of an increased substrate disturbance and visual response discussed above.
The only other species affected by tickler chains was pink-breasted siphonfish which, compared to the control in experiment 1, were caught at lower numbers in the single wing- and otter-board ticklers, but only attained significance for the former. This result might also reflect a common behavioural response between the wing ends to the tickler chain, whereby these small fish (3–8 cm TL) were stimulated off the bottom and may have passed between the ground gear and foot rope.The size of pink-breasted siphonfish and their likely poor swimming ability probably precluded any sustained response to the herding effects of the tickler chains to the wing ends.
While the mechanisms described above are somewhat speculative,the data nevertheless support using tickler chains in the studied fishery and configuring these at the wing ends, and with multiple separated surface areas to increase substrate contact. It might be possible to further mechanically stimulate penaeids through refinement. Additional work across multiple vessels and conditions is required to refine designs,including possibly using lighter ground chains (Broadhurst et al., 2015).Nevertheless, in the interim regional fishers might realise >10% increases in school prawn catches and at least some reduction sin unwanted fish. Other national and international fisheries might warrant testing for similar benefits, especially considering the costs of installing tickler chains are negligible and there are few, if any, operational concerns.
CRediT authorship contribution statement
Matt K. Broadhurst: Data curation, collected the data, Formal analysis, analysed the data and wrote the paper.
Acknowledgements
This study was funded by the New South Wales (NSW) Department of Primary Industries. Thanks are extended to the (NSW) Professional Fishermen’s Association, and especially Steve Everson and Don Johnson. Sean Blake is especially thanked for his field and technical assistance.
 Aquaculture and Fisheries2022年1期
Aquaculture and Fisheries2022年1期
- Aquaculture and Fisheries的其它文章
- A review of gynogenesis manipulation in aquatic animals
- Tilapia Lake Virus (TiLV) disease: Current status of understanding
- Classification and morphology of circulating haemocytes in the razor clam Sinonovacula constricta
- Potential probiotic and health fostering effect of host gut-derived Enterococcus faecalis on freshwater prawn, Macrobrachium rosenbergii
- Utility of gillnets for selectively targeting penaeids off Iran
- The deformation characteristics and flow field around knotless polyethylene netting based on fluid structure interaction (FSI)one-way coupling