高级驾驶辅助系统测试浅析及评价模型
2022-02-13 07:08何班本程梁柱夏钰璋马义超杨合鹏
汽车文摘 2022年2期
何班本 程梁柱 夏钰璋 马义超 杨合鹏
(东风汽车公司技术中心,武汉430056)
主题词:高级驾驶辅助 测试 评价
1 前言
按照美国汽车工程师学会SAE(Society of Auto⁃motive Engineers,SAE)对自动驾驶等级划分规定,高级驾驶辅助系统(ADAS)处于LEVEL3以下级别,仍需保证其系统的安全性和可靠性。随着高级驾驶辅助系统装配率的提升,测试需求也增长迅速。
一方面搭载高级驾驶辅助系统的汽车在研发阶段要经过大量的试验验证,另一方面国内外相关政府机构出台一系列政策法规来对高级驾驶辅助系统汽车进行约束限制,如美国于2016年出台《自动驾驶法案》,对自动驾驶汽车的生产、测试和部署进行监管。尽管目前关于ADAS的测试评价标准越来越成熟,但对于具体主机厂,在ADAS系统不同的开发阶段,采用种ADAS系统测试评价方法,定制1套ADAS系统评价模型很有必要。
2 高级驾驶辅助系统(ADAS)—测试标准及评价现状
高级驾驶辅助系统(ADAS)是利用传感器,在汽车行驶过程中实时感应周围的环境,收集数据,感知融合并对感知数据进行决策分析,最后对车辆进行控制,辅助驾驶员在道路上进行安全驾驶。
2.1 高级驾驶辅助系统测试标准现状
针对高级驾驶辅助系统的不同功能,国内外相关机构均出台了相关测试方法及场景规范。
2.1.1 国外测试标准状况
目前国外不同机构组织,针对自动驾驶车辆或智能网联汽车,已开展相关测试标准的制定工作。比如联合国欧洲经济委员会(United Nations Economic Commission for Europe,UNECE)成立“联合国智能网联法律工作组”(WP.29/GRVA),出台自动驾驶评价与管理办法(VMAD IWG)和自动转向法规(ACSF IWG),并不定期召开会议进行研讨。国际标准组织(International Organization for Standardization,ISO)成立道路车辆技术委员会(TC22)和有关运输信息与控制系统技术委员会(TC204)。TC22主要负责在1968年维也纳公约中所规定的道路车辆(包括挂车、摩托车、机动车、汽车列车、铰接车辆)及其装备的兼容性、互换性、安全性以及术语和性能评价试验规程(包括仪器的特性)的标准化工作。TC204主要职责在于交通信息和控制系统状况的总体目标和结构,以及与ISO整体计划的协调。SAE、E-NCAP也已制定更加严苛的标准法规。
2.1.2 国内测试标准状况
当前高级驾驶辅助系统(ADAS)在国内的装车率逐年升高,不仅在高端车上装备了ADAS,10万元的经济型轿车上也普遍装备了ADAS。同时,国内的相关机构(包括中国智能网联汽车产业创新联盟、全国汽标委智能网联汽车分技术委员会、中国汽车技术研究中心有限公司、中国汽车工程研究院股份有限公司等)针对高级驾驶辅助系统,也逐步出台了相关测试标准。比如GB/T(国家推荐标准)、JT/T(交通行业推荐标准)、i-VISTA智能汽车指数、以及根据E-NCAP进行中国本土化的C-NCAP。目前具有代表性的GB/T标准有GB/T 33577—2017(智能运输系统车辆前向碰撞预警系统性能要求和测试规程)、GB/T 26773—2011(智能运输系统车道偏离报警系统性能要求与检测方法)、GB/T 20608—2006(智能运输系统自适应巡航控制系统性能要求与检测方法),JT/T具有代表性的标准有JT/T 1242-2019(营运车辆自动紧急制动系统性能要求和测试规程)。
2.2 高级驾驶辅助系统测试评价现状
在测试评价方法上,国内外有很多测试评价方法和总结。国外一些安全评价机构如美国高速公路安全管理局(NHTSA)、欧洲新车安全评鉴协会(Euro-NCAP)等已针对高级驾驶辅助系统发布了测试评价方法。国内有中国新车评价规程(C-NCAP)、中国保险汽车安全指数规程(C-IASA)、中国智能汽车指数管理办法(i-VISTA)、智能电动汽车管理规则(CCRT),也发布了对高级驾驶辅助系统的测试及评价方法。比如2021版C-NCAP将增加侧方辅助、车道辅助、交通标识辅助等驾驶辅助评价内容。
林国庆等借鉴国内外研究成果,制定出符合中国国情的汽车自动紧急制动多种不同行人测试工况,提出了AEB-P测试与评价方法。Ayalew等对某乘用车车道偏离预警(LDWS)的客观性能进行实车试验,分析了直道与弯曲路段条件下,偏离方向、光照条件、车道线类型、横向偏离速度等因素的影响,提出了一种乘用车车道偏离预警系统测试与评价方法。周干等介绍了5种主流的自动驾驶仿真测试方法的最新进展,包括蒙特卡洛方法、蒙特卡洛加速方法、博弈论方法、测试场景矩阵方法、驾驶模拟器仿真测试方法。刘延等基于现有的自动驾驶汽车测试标准体系进程,从安全性、高效性和舒适性3个方面分析了自动驾驶测试评价面临的问题、构建了自动驾驶汽车测试评价系统架构。
3 高级驾驶辅助系统(ADAS)评价模型设计
针对汽车研发过程中,对ADAS系统开发质量的评价,目前没有统一的测试标准,各汽车研发单位均有各自的评价标准及流程,现在尚未建立完整成熟的综合测试评价体系。本文在上述测试及评价标准和方法上,结合汽车研发过程中的实际情况提出1种新的评价方法。
3.1 ADAS系统开发阶段评价要素
高级驾驶辅助系统是利用安装于车上的环境感知传感器(主要有摄像头、雷达、激光和超声波等),感知内外的环境数据,通过ADAS控制器对感知数据进行分析决策,然后向相关执行机构发送指令,提醒驾驶员或辅助驾驶员控制车辆(被动式报警和主动式干预)。根据ADAS系统感知、决策与执行过程,设计ADAS系统开发阶段评价的3个要素:目标识别、规控设计、执行机构。
3.1.1 目标识别
目标识别,属于自动驾驶感知层面,是自动驾驶汽车依托环境感知传感器(雷达、摄像头等)识别目标,通过定义目标可信度并进行建模分析,最后形成目标融合结果、定位及情景建模。包含目标检测、目标跟踪、场景分割等技术。目前目标识别技术在自动驾驶领域的应用仍面临诸多挑战,基于雷达和摄像头硬件自身属性,目标识别是ADAS技术进步的硬伤,也是最难跨越的,许多学者在目标识别方面进行了研究。Chen等基于双目立体视觉提出了运动场景下的多目标检测算法;Sio-Hoi等通过增加亮度信息来提高目标匹配的可靠性。目标识别的准确性是自动驾驶汽车解决的首要问题,防止误识别和漏识别是目标识别的关键。
3.1.2 规控设计
规控设计,属于自动驾驶规划与决策层面,在获取环境感知传感器、以及车辆内部自身监控的的车内外环境数据后,ADAS控制器根据一定的算法(包含MPC算法、PID算法等),规划车辆后续操作动作,以及给执行机构发送相关指令。规控设计的优劣,直接关系到ADAS系统的安全性及舒适性。在保障安全性的前提下,规控设计尽可能的提升驾乘人员的舒适性。规控设计是自动驾驶的难点,目前国内外学者对规控设计开展相关研究,比如陈无畏等在假设驾驶员具有汽车轨迹预测能力的基础上,提出一类基于轨迹预测的驾驶员方向控制模型。
3.1.3 执行机构
执行机构,属于自动驾驶执行层面,ADAS系统相关执行机构根据ADAS控制器的指令,及时、准确执行期望的动作。EMS:接收扭矩指令;ESP:接收主动制动指令;EPS:具备主动转向功能;TCU:可接收命令在PRND之间自动切换;EPB:按命令要求驻车或释放;BCM:显示或提示预警信息。ADAS系统对执行机构有两方面的要求,分别是速度和精度的要求,比如ACC请求的扭矩和实际(物理)轮端扭矩延时不能超过300 ms,10 s内,车轮端真实扭矩(动力总成在CAN上发送的)和实际(物理)车轮端扭矩最大偏差不能超过80 N·m(+40/-40)。(普通控制情况下:车速不低于2 km/h,没有换档,没有超过最大扭矩)。在ADAS系统开发过程中,基于传统车的开发基础,执行机构的控制相对较容易,出现质量问题,修改完善也较简单。
综上,目标识别与相规控设计同等重要,由于执行机构发展的较成熟稳定,其重要性小于目标识别与相规控设计。
3.2 ADAS系统开发阶段评价方法
针对汽车的评价方法有很多,有主观评价(比如汽车外观及感知质量评价等)、客观评价(比如汽车动力性评价、经济性评价等)、以及主客观结合的评价。对评价方法的研究也一直在延续。卢兆麟等提出了1种基于自然语言处理的汽车造型风格推导与评价方法;林庆峰等为评价L3级自动驾驶车辆接管的安全性,基于驾驶模拟器设计了双向六车道高速公路环境下的接管场景并进行驾驶模拟实验,建立1种接管安全性评价模型。评价工具也有很多可供选择,比如专家评价法、德尔菲法(专家调查法)、头脑风暴、CFT跨职能小组、WORKSHOP分析法等。
在ADAS测试评价过程中,针对质量问题的数量,出现的频次等,可以采用定量分析;针对不同问题类别的重要程度,就需要采用定性分析。基于ADAS系统开发评价要素特点,本文采用层次分析法(Analytic Hierarchy Process,AHP)来建立ADAS测试评价模型框架。
层次分析法根据问题的性质和要达到的总目标,将问题分解为不同的组成因素,并按照因素间的相互关联影响以及隶属关系将因素按不同层次聚集组合,形成1个多层次的分析结构模型,从而最终使问题归结为最低层(供决策的方案、措施等)相对于最高层(总目标)的相对重要权值的确定或相对优劣次序的排定。
3.3 ADAS评价模型搭建
高级驾驶辅助系统包多种功能,在开发阶段,各种车型搭载的ADAS功能可能不尽相同。在设计ADAS评价模型时,可用F表示各功能。比如FCW/AEB/ACC/LDW/LKA…可分别用F1/F2/F3/F4/F5…表示。各功能的评价要素可用P表示,比如针对F1功能的第1个评价要素,可表示为P,第2个评价要素,可表示为P…。总体评价目标(结果)可用O表示,模型框架如图1。

图1 ADAS评价层次模型
4 某款车型在研发阶段进行ADAS系统测试评价
在ADAS系统研发要经过多轮测试,主要包括虚拟测试、封闭道路测试以及开放道路测试。在研发的不同阶段,测试评价的目的不同,测试评价的重点也不相同。本文以某款车型做完虚拟测试,同步开展封闭道路测试和开放道路测试阶段,开展第1轮道路测试评价,为后续研发质量改进,优化ADAS系统提供参考。
4.1 测试功能项及评价要素权重设定
4.1.1 测试功能项
依据ADAS系统功能定义确定其测试功能项,同时设计好测试场景案例(测试场景案例设计是测试工程师依据现有测试场景库,与功能开发人员共同确定。在此不做详细描述)。本次测试的功能主要包括5个功能:FCW、AEB、ACC、LDW、LKA,关于每个功能的评价权重,采用专家评价法和层次分析法确定。首先邀请本车型项目开发的相关工程师作为专家,就本研发阶段,各功能的测试评价的权重进行定性的判断,判断结果为:预警功能小于控制功能;纵向控制权重小于横向权重。然后依据层次分析法,构建出O层(ADAS系统评价)相对于F层5种功能(FCW、AEB、ACC、LDW、LKA)的判断矩阵为:
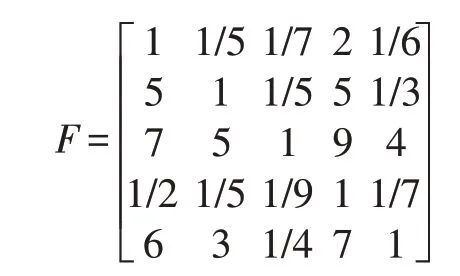
解得的最大特征值为5.354 2,对应的特征向量为=(0.080 4,0.227 5,0.879 2,0.055 5,0.407 2),归一化后=(0.048 7,0.137 9,0.532 9,0.033 6,0.246 8),则中各元素分别为F层5种功能的权重系数。
4.1.2 测试评价要素
在采用专家评价法确定各功能权重的同时,依据当前的研发阶段及本次测试需要关注的重点,同步确定本次测试的3个要素(目标识别、规控设计、执行机构)的权重,讨论确定的结果为:评价要素对各功能项的权重一致,分别为0.4、0.4、0.2。
4.2 ADAS系统测试评价过程及结果
本次道路测试的车辆台数为6台,每台车计划测试5 000 km,在不同进行测试测试在2周内完成。每台车辆上配备ADAS问题打点设备(及时记录ADAS性能不满足要求时的视频及相关车辆数据)。
测试评价步骤,如下:
(1)车辆(更新ADAS系统软件、安装数采)、司机准备工作完成,开展开放道路测试;
(2)对质量问题和抱怨进行打点记录;
(3)对每个质量问题进行功能分类(具体到哪个功能;
(4)对功能的质量问题进行分析归类(目标识别问题、规控设计问题、执行机构问题);对质量问题进行总体汇总,综合计算ADAS系统评分。按照总分对ADAS系统进行综合评价,评价规则如表1所示。

表1 等级评价规则
最终统计ADAS系统质量问题76项。其中FCW 4项;AEB 10项;ACC 38项;LDW 7项;LKA 17项。对每项的数据进行分析归类。在每项评分上,依据专家评价法也进行了确定:现阶段,在整个测试阶段没有出现问题的取10分,出现1~3次问题的为7分,出现4次问题的为6分,以此类推,出现7个问题的为3分,超过7个问题的为0分。特殊处理:由于ACC在道路测试过程中是一直开启且使用频次很高,故对ACC的问题数量取1/3处理,LKA的开启频率较高,对LKA的问题数量取1/2处理,以便更能接近客观的反应ADAS系统的成熟度(表2)。

表2 测试结果汇总
最后根据各评价要素的权重及各功能权重,加权计算出各功能的评价得分及整个系统的评价得分,如表3。

表3 评价结果
结果评价:本次对ADAS系统评价,总体表现良好。其中AEB和ACC表现一般,结合评价要素结果汇总。判断为ADAS系统在目标识别上还需要做重点改进。
5 结语
本文介绍了高级驾驶辅助系统测试评价标准及方法,并在其基础上,提出1种ADAS系统评价方法。依据ADAS系统开发过程中的特殊性,及相关功能开发的成熟度不同,提出ADAS系统开发阶段的评价要素(目标识别、规控设计和执行机构)。利用专家评价法及层次分析法搭建各个功能下的层次模型,并确定其权重系数。结果表明:通过引入作为ADAS的评价要素并给予不同的权重,开展对ADAS测试评价,在研发阶段,给ADAS系统开发提供系统改进方向参考。
猜你喜欢
工业设计(2022年9期)2022-10-13
阅读(低年级)(2019年2期)2019-04-19
中学数学杂志(初中版)(2017年4期)2017-08-28
小天使·一年级语数英综合(2017年3期)2017-04-25
汽车博览(2016年9期)2016-10-18
小学阅读指南·低年级版(2016年1期)2016-09-10
小天使·一年级语数英综合(2015年10期)2015-10-14
文理导航·科普童话(2015年6期)2015-07-29
小猕猴学习画刊(2015年2期)2015-01-22
海外英语(2013年9期)2013-12-11