基于图像的煤岩界面识别技术研究
2022-02-11 10:43:38张释如张艳花
煤炭工程 2022年1期
张释如,张艳花
(西安科技大学 通信与信息工程学院,陕西 西安 710054)
1 概 述
国家能源科技“十三五”规划提出煤矿无人工作面,无人值守理念,煤岩界面自动识别是实现该理念的重要技术之一。矿井下的煤和岩石主要是间隔分布,采煤时需要准确识别煤岩界面,在界面处下刀,只采煤而不采矸,提高采煤效率[1]。
目前我国的采煤方式多为记忆截割加人工远程干预[2-6],通过人眼观察进行界面识别,再对采煤机进行远程操控,并未实现煤岩界面的自动识别和无人开采。此外,采用记忆截割加人工远程干预开采技术,开采成本较大,若未准确识别煤和岩,有可能导致瓦斯爆炸、突水等矿井事故发生,严重威胁工作人员的人身安全,更严重的会对周围环境甚至整个生态圈造成破坏。正是由于这些潜在危险,急需研究出一种以“绿色安全高效”开采为目的,无人开采为最终目标的开采技术,即在环保的前提下使得环境破环最小化、安全系数最大化、采煤效率最高化的采煤技术。煤岩界面识别技术可使采煤机自动追踪煤岩界面,控制采煤机的滚筒高度,防止误割岩石,改善煤质,提高采煤效率与安全系数[7]。因此煤岩界面识别[8]是实现此目标的一种有效途径。
本文主要对基于图像的煤岩识别技术和应用进行探讨。首先对基于图像的煤岩界面识别方法,及其优缺点进行分析。之后,提出将煤岩图像三维建模和关注煤岩不同介电特性的方法相结合,是一种具有前途的可行方法。该方法可以构建出煤岩界面纵深方向3D可视化图像,得知采掘面深层的煤岩分布情况,从而更准确地控制采煤机滚筒高度,提高煤质和采煤效率。最后,分析煤岩界面识别技术在采煤机和液压支架上的潜在应用,并指出摄像头的合理安装位置尤为重要,它直接影响了三维建模的效果和煤岩界面识别的准确率。
2 基于图像的煤岩界面识别研究进展
在真实的煤矿中,煤炭的赋存条件不确定。采煤机在开采时主要根据煤层和岩层的边界对滚筒高度进行调整。当遇到三角煤或可回采的煤柱等特殊情况,煤岩界面的准确识别显得尤为重要。目前煤岩界面识别方法主要有射线探测法[9]、红外探测法[10,11]、有功功率探测法[12]、震动探测法[13-16]、声音探测法[17-21]等,但这些方法易受到煤矿中其他因素的影响,例如矿井的电磁波干扰、放射性物质的含量、煤层和岩层的普氏系数、煤层厚度、夹矸量等。随着图像处理与模式识别技术的迅速发展,学者们逐步开始研究基于图像的煤岩界面识别技术,并取得了一些初步的成果。下面主要从经典图像处理法、常规模式识别和三维建模法对基于可见光图像的煤岩界面识别技术进行介绍。
2.1 经典图像处理法
2.1.1 利用图像灰度特征
理想情况下,煤和岩石具有不同的灰度值,可通过图像灰度级出现的频数、灰度范围、灰度分布状况等参数识别煤岩界面[7]。董丽红教授等[22]通过改进Canny算法,利用煤和岩石的灰度均值、方差识别煤岩边界;黄韶杰[23]选取灰度区分度较高的工作面煤壁图像,通过图像的灰度特征设定阈值,研究了煤岩界面识别;彭静[1]通过改进Hough变换设定阈值,使煤岩灰度均值的类间方差达到最大,从而准确找到煤岩分界线。以上方法的仿真结果较好,但实验样本非常理想即煤岩灰度差异较大,易于识别。在实际中,煤矿井下的环境较复杂,采集的图像质量很差,上述煤岩界面识别方法未必都能适用。
2.1.2 利用图像纹理特征
图像的纹理特征是物质的表面特性,是在一定区域内对图像像素的统计结果。纹理最明显的视觉特征是物体表面的粗糙度、方向性和周期性。灰度共生矩阵[24]常用来描述图像的纹理,即统计特定间隔、特定方向上的像素对在图像中出现的频率。在煤岩识别中,学者们往往通过计算纹理特征的统计量(例如熵、相差度、能量、逆差矩)来分辨煤和岩石。例如,文献[25]利用角二阶矩、对比度、相关性等22个基于灰度共生矩阵的特征参数对煤岩界面进行识别,识别率达到93%;文献[26]利用可分性准则选择贡献率最多的4个基于灰度共生矩阵的纹理特征即方差、方差和、自相关和平均值之和用于识别煤岩界面,识别率达到94.12%;文献[27]通过计算能量、对比度、自相关、和熵4个基于灰度共生矩阵的纹理特征,结合神经网络识别煤岩界面,识别率达到95.8%。以上方法的识别率较高,但它们都是在实验室条件下取得的,实际应用效果还需进一步验证。
除了直接应用灰度共生矩阵分析煤岩图像纹理,文献[28]利用小波变换较好的局部特性和奇异特性,提出了一种基于多小波变换的煤岩界面识别方法。该方法用小波变换表达了煤岩的纹理特性,获得了96.14%的识别率。
以上是学术论文的情况,在专利方面,刘俊利等[29]提出了基于机器视觉的煤岩界面识别方法,对采集的图像进行形态学处理,得到一条完整的煤岩分界线;刘送永教授等[30]通过对采集的煤岩图像进行去噪、纹理提取等操作,建立煤岩图像坐标系,对煤岩界面轨迹进一步优化,进而控制采煤机滚筒高度。
2.2 常规模式识别法
2.2.1 神经网络方法
神经网络是一种在不同程度和层次上模仿人脑神经系统的分布式并行处理信息的数学模型。随着科技的发展,研究者们将神经网络进行改进,有时还和其他信号处理方法进行结合,旨在获得高识别率、高识别速度的方法。孙继平教授等[31]用分块离散余弦变换处理煤岩图像,采用学习向量量化的神经网络识别煤和岩石,识别率达96.67%;文献[32]提出利用RBF神经网络提取的煤岩图像纹理特征实现煤和岩石的识别,获得0.00006的识别误差。文献[33]将VGG、区域建议网络和R-CNN网络进行结合,输出煤层边界点的像素坐标值,再利用针孔模型计算出煤岩边界,实现煤岩界面的识别。
神经网络方法,虽然识别率高,但在训练网络模型时需要大量的样本,这在实际中非常困难。因此很难用于实际。
2.2.2 支持向量机方法
支持向量机是专门用于小样本学习的机器学习分类方法,借助二次规划来求解支持向量,对于二分类的鲁棒性较好。目前支持向量机对煤岩界面识别的研究主要是处理采煤机的振动信号[34]和切割力[35]等一维信号,用于煤岩边界图像的研究甚少。支持向量机不需要任何先验知识,直接通过数学方法将特征向量分类,对于小样本分类,尤其是二分类效果较好。由于矿井复杂的环境,采集大量高质量的煤岩界面图像有一定困难,因此将支持向量机应用到煤岩边界图像识别具有较大的潜力。
2.2.3 K-means方法
聚类方法主要针对数据量较大的的数据分类,使同一簇内的对象尽可能地相近或者相关,不同簇内的对象尽可能地远离或者不相关。常见的聚类准则有阈值准则和函数准则[36],其中最为经典的是基于函数准则的K-均值聚类方法,简称K-means方法。此方法可以很好地获取图像的局部信息,实现过程简单,只需调节簇数K。对于煤/岩两簇分类具有较好的可行性。江静[37]将K-means方法用于煤岩界面识别,通过仿真发现只有当初始点数目选择恰当,识别效果才能好。可见K-means方法受制于初始点数目的选择,初始点数目选取过多,导致算法复杂度增大;初始点数目选取过少,达不到分类的效果[38,39]。
2.3 三维建模法
三维建模法指对矿井工作面的采煤壁进行三维模型的构建,目的是便于直观地观察到煤岩界面。传统的煤层三维模型是利用三维地震波探测数据拟合形成的。马宏伟教授[40]提出通过采集实测地质数据和预测滚筒高度轨迹,实现煤层三维模型的构建、煤岩界面的准确识别;文献[41]通过建立基于统一坐标系的煤岩分界面地质预测模型与综采装备群三维空间位姿模型,获取采煤机的截割轨迹线,采用视频图像的方式识别煤岩界面。此类方法主要通过采集地质数据建立煤层三维模型,但对于地质数据的采集需要专业人士采集,且构建的系统结构复杂。
除了利用地质数据构建煤层三维模型,文献[42]提出利用广义反射-透射系数法和一维水平多层速度模型得到传输信道波的理论色散曲线,再结合三维反投影技术,通过传输信道波的数据得到煤层工作面的三维速度图像,最后根据三维速度图像上面的煤岩界面剪切波速的变化和反演速度的变化率定量解释煤层厚度。
3 三维建模与煤矸介电特性结合的新方法
鉴于煤和岩石是夹层分布,采煤机在割煤时会误割岩石。作者认为仅靠煤岩表层的界面识别是不够的,必须探索表层下面的深层煤岩分布结构,因此可以采集煤岩界面的表面图像,对其进行煤岩表面的三维建模,然后利用煤和岩石对电磁波的不同介电特性进行煤岩表面下的深层次三维建模。这样,采煤机就可根据表面的界面情况进行调高,然后根据表面下的深层次立体模型调动采煤机头的运动方向,进而连续准确地控制采煤机的滚筒高度,实现无人化的精准开采。
煤和岩石两种物质本质上差别很大,表1和表2[43]列举了常见的煤和岩石的相对介电常数和电导率。研究者们可利用电磁波在介质中传播时不同介电常数、电导率和衰减系数以及发射频率之间的关系,研究煤岩界面电磁波探测的理论条件和依据[44,45]。例如,探地雷达就可利用煤和岩石具有不同介电特性,从而得到不同的反射波,实现煤岩界面识别。文献[43、46]通过理论分析和相关实验证明探地雷达可用于煤岩界面。其中文献[43]是在郭庄煤矿用400MHz的雷达天线探测气煤和砂岩的界面,实验表明400MHz的雷达天线可探测深度是3~10m。

表1 常见煤介质的相对介电常数和静态电导率
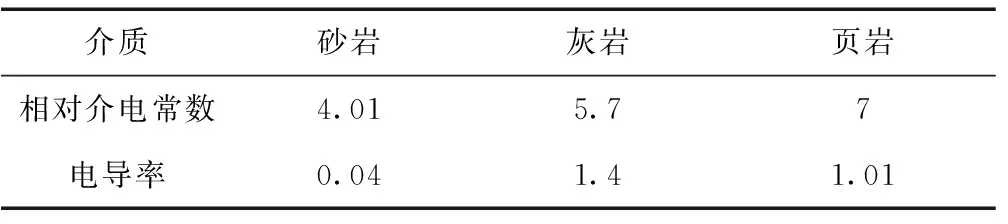
表2 常见岩介质的相对介电常数和静态电导率
因此,本文提出可以先拍摄采掘面表面图像,生成表面的3D模型,再利用探地雷达得到内部深层次的三维煤岩分布模型,从而实现准确识别煤岩界面、精准调整采煤机的滚筒高度和采煤机头的方向。
4 煤岩界面识别的应用探讨
上述提出了三维建模与煤矸介电特性结合的新方法,实际应用中三维建模算法的关键之一是图像采集。所以摄像头的安装位置对后续的界面识别算法影响很大。
4.1 煤岩界面识别在采煤机上的潜在应用
鉴于国内采煤机最初没有自带摄像头等传感器,为满足使用需求,部分煤矿尝试在采煤机上安装摄像头。例如内蒙古神华集团景界煤矿在采煤机机身安装4只摄像头;2017年神东公司在对型号为EKFSL000-6595采煤机改造项目中,在采煤机机身安装3只360°全方位摄像头。之后,生产厂商开始尝试直接在制造采煤机时安装摄像头。2019年7月,上海煤炭科学研究院发布了针对特厚煤层的新型MG1100/3050-WD系列3050采煤机。该设备包含机载截割视频技术,清晰显示了采煤机的滚筒高度。2019年8月,西煤机公司自主研发的世界首台超大采高智能化采煤机MG1100/3030-GWD面世,该设备包含自动调高、远程监控、三维定位技术,可以清晰显示采煤机的当前位置和滚筒高度。
国外采煤机也自带了视频采集装置,日本小松矿业有限公司制造了长壁采煤机系列在摇臂上装有红外彩色摄像头,该公司在2012拉斯维加斯煤机展的型号为7LS0。德国艾克夫公司在2015年北京国际煤机展上展示了SL300L采煤机,其本身自带了摄像头。这些技术虽然先进,但也只是便于人们远程干预开采,并未利用煤岩界面识别技术进行真正的智能开采。
4.2 摄像头安装位置的探讨
摄像头装在采煤机上,可使其跟随采煤机活动,但摄像头距离工作面较近,在采煤机工作时抖动过大,另外粉尘较多,使得采集的图像质量大大下降,基本不可用。因此可以在液压支架上安装摄像头。
目前很多煤矿都在液压支架上安装了摄像头,其主要目的是监测矿井下的安全。由于工作面一般长达200~300m,含有多个液压支架,对于摄像头的安装位置研究者们进行了大量实验。文献[47]提出每隔6个液压支架安装1只摄像头;文献[48]提出每隔8个液压支架安装一只摄像头;文献[49]提出每间隔4~8台液压支架安装一只摄像头,这些方法安装的摄像头都是相同的摄像头。何广东等[50]提出每隔2台液压支架安装1只本安型固定摄像头,每隔6台液压支架安装1只180°旋转的云台摄像头。
如果摄像头装在液压支架上,由于距离工作面较远,采集的图像质量会存在无法聚焦、模糊等现象,致使图像质量很差。因此无论摄像头安装在采煤机上,还是安装液压支架上,都各有利弊。如果能解决摄像头的防抖动、多粉尘的问题,可以将摄像头安装在采煤机上。若选用超高清、高聚焦的高级摄像头,可尝试将摄像头安装在液压支架上。因此,为了高质量地采集采掘面的煤岩图像,应该根据具体情况进行大量的实验,确定摄像头的安装位置。只有获取到高质量的煤岩图像前提下,后续的煤岩界面识别算法才能达到较高的识别率。总之,摄像头的安装位置对于煤岩界面识别非常重要。
5 结 论
1)提出了图像三维建模和介电特性相结合的方法,即可生成煤层表面的三维模型,又可将煤壁深层的煤岩界面可视化,构建内部深层次的煤岩分布模型,从而实现煤炭的智能开采。
2)指出了摄像头安装位置的重要性,安装位置将大大影响到后续的图像处理、三维建模的结果。为了提高煤岩界面识别算法准确率,需要合理设置摄像头的安装位置,从而高效、高质量地采集图像数据。
猜你喜欢
选煤技术(2023年4期)2024-01-02 03:10:50
防爆电机(2022年1期)2022-02-16 01:14:06
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
中国交通信息化(2018年3期)2018-06-13 03:27:58
中国交通信息化(2016年2期)2016-06-06 07:28:02
江西煤炭科技(2015年2期)2015-11-07 03:10:16
江西煤炭科技(2015年1期)2015-11-07 03:06:32
中国煤层气(2015年4期)2015-08-22 03:28:01
河南科技(2014年18期)2014-02-27 14:14:58