
基于FPGA的星敏感器探测器制冷控制系统*
2022-02-03 10:16宋雪冬唐行菊
飞控与探测 2022年5期
宋雪冬,周 琦,李 猛,唐行菊,赵 君
(1.上海航天控制技术研究所·上海·201109;2.上海市空间智能控制技术重点实验室·上海·201109)
0 引 言
星敏感器是高精度姿态轨道控制系统中的重要单机,通过以恒星坐标系为参考基准,提供高精度的位置、姿态等信息,具有自主导航、无积累误差、质量小、功耗低等优点[1-3]。探测器是星敏感器的核心部件之一,用于观测并成像,以得到精确的星图数据。由于星敏感器在轨运行时会受到自身功耗发热以及太阳热辐射的影响,需要为探测器提供稳定可靠的工作温度[4],否则将影响探测器的成像质量,最终影响星敏感器输出的位置、姿态信息的精度。因此,研究制冷响应快、控温精度高、可靠性好的星敏感器探测器制冷控制系统具有重要的意义。
目前已有很多关于制冷控制系统的研究成果。2005年,张彤等[5]提出了一种基于数字信号处理器(Digital Signal Processor,DSP)的星载红外探测器温度控制系统,有效降低了探测器输出的信号噪声密度。2012年,黄新栋[6]基于微控制单元提出了一种比例、积分、微分(Proportional Integral Derivative,PID)闭环自动控制的高精度制冷控温系统。2013年,常霞等[7]基于DSP提出了星载制冷控制系统的软件设计。2017年,张鹏等[8]基于1553B总线和微处理器,提出了一种航天相机用的测温控温系统。然而,微处理器存在运算速度慢、抗干扰能力差、复位不可靠、程序跑飞等风险。与微处理器相比,现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)可通过设计数字逻辑电路来实现控制算法,具有运算速度快、可靠性高、功耗低、设计灵活等特点[9]。2019年,谢妮慧等[10]基于FPGA提出了一种采用PID控制和正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)的制冷控制系统,电路设计简单,可靠性高。
本文针对星敏感器探测器提出了一种基于FPGA的制冷控制系统,采用分段式数字PID控制算法并生成脉冲宽度调制(Pulse Width Modulation,PWM)波控制制冷器以实现高精度制冷,旨在得到响应速度快、超调量小、精度高的制冷控制性能。
1 基于FPGA的制冷控制系统
1.1 系统框架
图1所示为制冷控制系统的整体框架。探测器的温度信息由导热块传感并用温度传感器采集,再通过AD转换器转换为数字信号后,将光学探测器的实时温度传给FPGA内部的分段式数字PID控制模块,由该模块根据实时温度和目标温度的差值计算得到PWM生成模块的控制量。同时,通过控制电流采样器对半导体制冷器的工作电流进行实时采样,并将其AD转换后的数字信号输入到FPGA内部的限流保护模块。若检测到电流异常,则FPGA制冷控制系统立即切断半导体制冷器的供电;若电流正常,FPGA制冷控制系统则根据数字PID控制模块输出的PWM控制量生成PWM信号,控制半导体制冷器对探测器实现高精度制冷。

图1 制冷控制系统原理框架Fig.1 Schematic diagram of refrigeration control system
此外,在分段式数字PID控制模块内部对输出PWM信号的脉宽进行限幅,以起到对半导体制冷器的限流保护作用。
1.2 分段式数字PID控制方法
PID控制是一种技术成熟、应用广泛的自动化控制技术,具有抗干扰能力强、实用性高等优点。式(1)为模拟PID控制算法的表达式。
(1)
式中,u(t)为PID控制的输出;e(t)为PID控制的输入;Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
而基于FPGA采用硬件描述语言设计数字逻辑电路以实现PID控制算法,需要将模拟PID控制算法转换为离散PID控制算法,如式(2)所示。
(2)
式中,e(k)为实时温度与制冷目标温度的差值;Ts为采样周期;k、u为采样序号,u=0,1,2,…,k。通过实时温度与制冷目标温度差值的比例项、积分项和微分项,可计算得到输出量u(k),即PWM波生成模块的控制量。
本文采用增量式PID控制算法[11],以简化计算过程,节省内存空间。对式(2)化简可得
Δu(k)=Kp[e(k)-e(k-1)]+Kie(k)+
Kd[e(k)-2e(k-1)+e(k-2)]
(3)
根据式(3)可知,采样周期Ts不仅会影响到积分系数和微分系数,还会影响到PID控制模块输出的PWM控制量的更新速率。因此,本文提出了分段式数字PID控制算法,如下
(4)
式中,T1和T2分别为快采样周期值和慢采样周期值;t为时间;t0为制冷控制系统的制冷开始时间;t1为探测器温度第一次到达制冷目标温度的时间。
在制冷初始阶段采用快采样周期,使得制冷控制系统能够快速响应,并在探测器温度到达目标温度后迅速减小PWM波控制量,显著降低制冷过程的超调量。但由于采样速度过快,导致PWM波控制量无法收敛。因此,当探测器温度第一次到达目标温度时,控制算法切换为慢采样周期,使得PWM波控制量最终收敛,制冷控制系统达到稳定状态。
本文采用VHDL硬件描述语言实现分段式PID控制模块,对式(3)进行化简可得
u(k)=K0e(k)+K1e(k-1)+
K2e(k-2)+u(k-1)
(5)
图2所示为算法实现的数字电路框图。
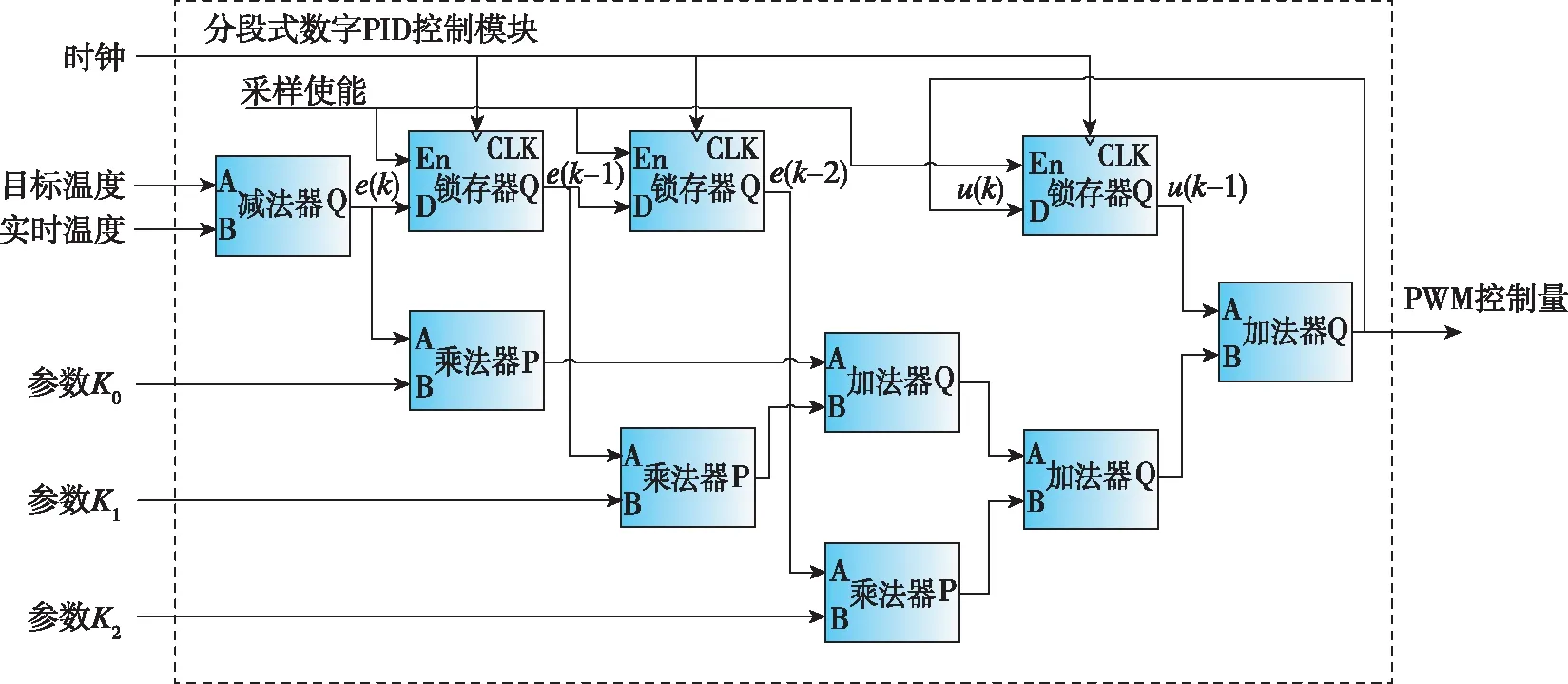
图2 PID模块数字电路框图Fig.2 Digital circuit diagram of the PID module
该模块的输入参数为目标温度、实时温度与PID控制参数K0、K1、K2。首先利用减法器得到目标温度与实时温度的差值,并通过锁存器按采样周期对其进行采样,得到e(k)、e(k-1)、e(k-2)。再采用乘法器和加法器,将e(k)、e(k-1)、e(k-2)与相应的K0、K1、K2相乘并相加,最终与上一周期的控制量u(k-1)相加,得到此周期的PWM波控制量u(k)。所采用的减法器、加法器、乘法器均采用内置IP核实现。
此外,对模块输出的控制量进行限幅,以实现对半导体制冷器的限流保护作用。
1.3 PWM波生成电路
本文采用PWM波形驱动电路,控制半导体制冷器进行制冷。图3所示为PWM波示意图。
PWM生成模块的数字电路框图如图4所示,输入参数为PID控制模块输出的控制量u(k)和半导体制冷器的实时电流值。其中控制量u(k)为PWM波的脉宽参数。首先,通过计数器与比较器,生成相应占空比的PWM波。然后,如果半导体制冷器的电流值异常,则电流比较器持续输出0,经过与门后,得到PWM波信号持续为0,制冷器保持关闭状态;否则,电流比较器输出1,PWM波信号的值与PWM比较器输出的值一致,即可输出正常的PWM波形,控制半导体制冷器进行制冷。

图3 PWM波示意图Fig.3 PWM wave

图4 PWM生成模块数字电路框图Fig.4 Digital circuit diagram of the PWM generation module
2 实验结果
对星敏感器产品进行制冷测试,以验证本文提出的制冷控制系统的性能。产品起始温度为20.5℃,目标温度为15℃。探测器温度信息更新频率为10Hz。测试结果如图5所示。

图5 探测器温度曲线Fig.5 Detector temperature curve
根据探测器温度曲线可见,在制冷初始阶段采用快采样周期,此时制冷控制系统的响应迅速。并且在探测器温度到达目标温度15℃时,立即停止制冷,超调量小。这是由于PWM控制量更新频率高,对探测器温度非常敏感。探测器温度到达目标温度后,控制算法切换为慢采样周期,探测器温度逐渐收敛于目标温度,精度可达到±0.25℃。
3 结 论
本文针对星敏感器探测器提出了一种基于FPGA的制冷控制系统,采用分段式PID控制算法生成PWM波,控制半导体制冷器对探测器进行制冷。通过实验验证,本制冷控制系统具有制冷响应快、超调量小、控温精度高的特点,能够精准、可靠地将探测器稳定在合适的工作温度,保障其工作性能。
猜你喜欢
电子制作(2019年22期)2020-01-14
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
电子制作(2018年9期)2018-08-04
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年1期)2017-05-17
电子制作(2016年19期)2016-08-24
