
国内外大型电铲智能化发展现状及趋势★
2022-01-25 04:39王勇澎
机械管理开发 2021年11期
王勇澎
(1.太原重工股份有限公司技术中心,山西 太原 030024;2.矿山采掘装备及智能制造国家重点实验室,山西 太原 030024)
1 大型电铲存在的技术问题
大型露天矿用电铲在露天矿山开采系统中承担矿岩的“挖掘”和“装载”两大重要职能,是露天矿山间断和半连续开采工艺系统的关键设备,其综合性能直接决定着整个矿山开采的生产效率。大型电铲工作对象和载荷复杂多变(重载、强冲击、强振动),服役环境极其恶劣(极寒、高温、高海拔、高粉尘等),目前大型电铲主要依靠人工经验操作去挖掘,存在以下问题:
1)作业:效率低、满斗率低、自动化和智能化程度低,受作业环境的限制;
2)人机交互:工人作业环境恶劣、操作难度大、工作强度大;
3)节能环保:能耗高、能源利用率较低;
4)成本:综合成本高。
2 国内外智慧矿山发展现状
智慧矿山的建设,源于世界能源科技的发展趋势和我国能源结构升级调整的需要。
2.1 国外智慧矿山发展现状
近些年,瑞典、芬兰、澳大利亚、加拿大等国先后制定了“智能化矿山”和“无人化矿山”发展规划。矿业巨头力拓集团2008年启动在澳大利亚建全球首个“智能矿山”项目,由机器人、无人驾驶矿车、无人钻机、无人推土机和无人运货火车的智能设备网络组成。小松的无人运输系统已经在澳大利亚、南美、北美的6座矿山应用,车辆总数超过100台。
2.2 国内智慧矿山发展现状
2016年,我国发布了《全国矿产资源规划(2016—2020)》,明确提出要大力推进矿业领域科技创新,加快建设自动化、信息化、数字化、智能化矿山,大力发展“互联网+矿业”[1]。我国第一部以“智慧矿山”命名的技术规范《智慧矿山信息系统通用技术规范》(GB/T 34679—2017)于2018年5月1日起开始实施,标志着智慧矿山的建设开始落地推广。
目前,国家能源集团、中煤集团、华能集团、鞍钢矿业,江西铜业等数十家矿业公司先后提出了建设“智慧矿山”的发展战略,其中鞍钢矿业智慧矿山建设规划如图1所示,积极部署5G+无人驾驶的应用,多个露天矿山正在开始无人建设矿车测试。
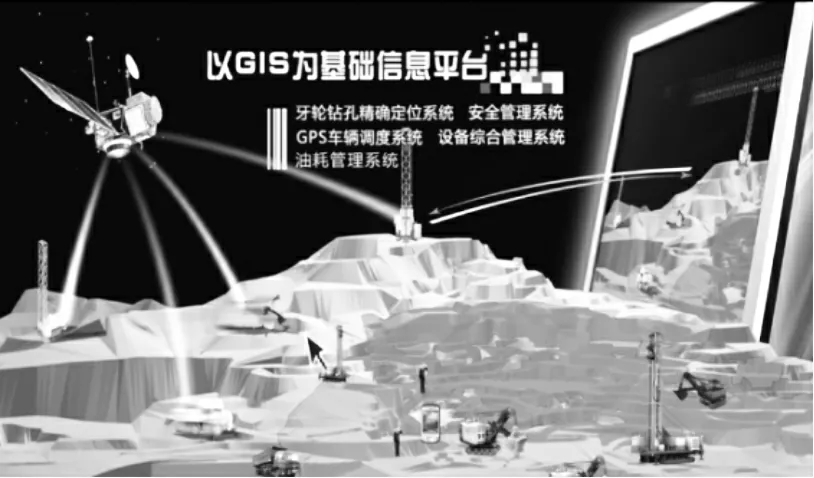
图1 鞍钢矿业智慧矿山建设规划
因此急需提高与矿车配套使用的电铲的自动化、信息化和智能化水平,以满足国内外各大矿山建设智慧矿山的需求[2]。目前全世界生产大型电铲的制造商成三足鼎立之势,分别是小松(收购P&H)、卡特彼勒和我国太原重工,其中太重研制的大型电铲如下页图2所示。
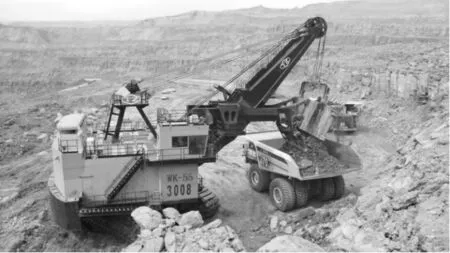
图2 太重研制的WK-55电铲作业现场
3 国外电铲智能化发展现状
经过多年的用户反馈及优化改进,电铲各部件结构已基本成熟和固定,为进一步提高产品竞争力和满足用户更高需求,近年来国外小松(收购P&H)和卡特彼勒都加大了电铲的智能化研究,以不断提升电铲综合性能和市场竞争力。
3.1 自适应控制系统
通过优化挖掘周期不同阶段的电铲各机构力矩和速度,改进电铲控制系统。在挖掘过程中通过灵活控制推压和收回斗杆,从而减小挖掘阻力,减少了平均57%的冲击和顶起起重臂情况,提高电铲挖掘效率,同时减轻操作对机器的不良影响[3]。
3.2 远程健康管理系统
给用户及时、高效的提供设备的主电源、电机轴承温度、制动器等关键状态信息,同时统计设备的生产力、利用率、停机时间、设备警告等信息,方便用户优化生产和可靠性维护策略,提高产品可靠性、生产效率和盈利能力[4]。
3.3 通用电铲接口
可以与矿山管理系统中发送和接受数据,包括给矿方提供电铲GPS位置信息、挖掘产量、电铲行走启停、故障信息等。矿山管理系统给电铲合理分配矿车,方便矿山进行信息化管理,提高矿山各个设备利用率,从而提高开采效率。
3.4 挖掘过程智能化研究
小松和卡特彼勒都在开展大型电铲挖掘过程智能化研究。小松正在开展的研究内容包括地貌扫描(如图3所示)、铲车对位和自动装载;卡特彼勒采用1∶7电铲实验样机开展入铲点、满斗率检测以及料堆形状的变化等研究。
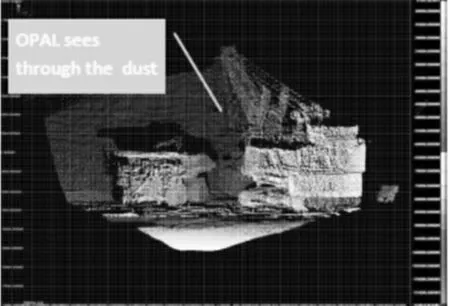
图3 小松使用激光雷达进行地貌扫描研究
4 国内电铲信息化和智能化发展现状
4.1 自适应智能辅助挖掘
针对料堆内部矿岩形态复杂多变,为提高挖掘效率,减少挖掘过程突变重载对电铲自身机构的损坏,自主研制出了适应多变载荷的自适应智能辅助挖掘系统,自主决策调整推压及提升机构力矩,形成与料堆内暗藏矿岩形状相符合的自适应挖掘轨迹,实现连贯、平稳、高效挖掘。
4.2 运行状态监测系统
不断开发并完善了各机构减速机在线振动监测、制动器状态监测、关键部位的轴承和铜套温度监测、关键零部件磨损监测、关键点润滑监控、空压机状态监测等功能,实现了对设备运行状态的实时监测,确保故障发生之前可以进行预判。
4.3 设备健康管理系统
通过挖掘机运行状态实时监测与数据积累构建专家知识库和故障模式库,形成设备自主健康管理诊断系统,包括本地健康诊断(故障自诊断)和远程健康监测(故障预判)两大部分。实现设备的故障自诊断和预警、预防性维护、主动推荐保养管理、运维管理等功能。
4.4 生产管理系统
开发了铲斗中物料在线称量系统,可获取挖掘机每斗挖掘重量,最终实现挖掘机产量统计。同时实现挖掘机各机构的运行时间、电能消耗管理和润滑油量消耗,传输给矿山管理中心,方便用户统计产量和计算运维成本。
4.5 安全防护系统
为了保障设备的安全运行,针对电铲结构和工艺特点,开发了工作面倾角预紧、斗杆—起重臂防碰撞、铲斗—履带板防碰撞、预防起重臂顶起和软着陆等安全防护系统,确保电铲及工作装置在最优安全区域内运行,实现了设备安全运行控制,极大程度上减小了设备的损坏,提高使用寿命。
4.6 监控系统
包括盲区监控,智能斗齿识别和司机操作行为监控等系统。为了防止在回转作业和行走过程中和矿山其他设备发生碰撞,特开发盲区监控系统,可帮助司机观察到电铲左右两侧、后侧及机棚内部的状况。智能斗齿识别系统可以监测到铲斗斗齿的磨损程度和是否掉落[5]。司机操作行为监控系统可帮助矿山管理层更好地评价司机操作是否规范,减少因操作导致的安全事故。
4.7 开发了电铲服务云平台、车载终端云平台和手机APP
服务云平台包括电铲各机构实时数据显示、运行数据管理、大数据统计、故障报警和备件管理等信息,针对用户、厂家及售后服务人员用不同查看权限,结合车载终端和手机APP可以更方便地对设备进行管理和维护[6]。
5 电铲信息化和智能化发展趋势
结合新一轮科技和产业革命,将数字化、网络化、智能化技术在大型电铲上应用,未来大型电铲智能化方面会有如下发展趋势:
1)电铲信息化和智能化水平进一步提高。随着各项新技术和传感器的应用日趋成熟,开发出更加全面的电铲智能化控制和管理系统,提高产品综合性能,方便用户对电铲进行更好的信息化管理。
2)实现电铲远程操作,基于目前电铲已实现的智能化功能,采用5G通讯技术,开发一套远程操作平台,将实现电铲远程操作,大大改善司机的作业环境,同时可解决矿山招工难等问题。
3)实现电铲无人操作是智能化发展的最终目标。目前该技术还处于刚刚起步的研究阶段,国家煤矿安监局发布的《煤矿机器人重点研发目录》(2019年1号文件)中明确提出:最终要实现露天电铲作业智能化和无人化[7]。攻克电铲定位/定姿、环境感知、自主分析和决策、多机构协同控制和自动装载等系统,最终通过机器深度学习,周围环境自适应和多机构精中控制,实现电铲无人化作业。
6 结语
智慧矿山高效、智能开采的需求和人工智能、网络技术及多传感技术在矿山装备领域的集成应用,必将提高电铲全方位状态监测、较好的自主检测修复能力、高效的开采能力和极佳的无人化作业水平,引领世界露天采矿装备的发展,推动露天矿山安全、高效、绿色、智能开采。
猜你喜欢
军事文摘(2022年19期)2022-10-18
现代工业经济和信息化(2022年6期)2022-08-02
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
矿产勘查(2020年7期)2020-12-25
印刷工业(2020年4期)2020-10-27
商品与质量(2019年4期)2019-12-21
中国交通信息化(2017年4期)2017-06-06
电子制作(2016年11期)2016-11-07
