自动物料定量分装机构运动仿真设计
2022-01-25 04:15马正鹏潘秀石屠晶晶
技术与市场 2022年1期
马正鹏,文 萍,潘秀石,刘 勇,屠晶晶
(苏州经贸职业技术学院机电技术学院,江苏 苏州 215009)
0 引言
在进行自动化设备运动机构的设计过程中,为了能验证所设计机构的合理性和可行性,通常都需要对机构进行机构运动分析。在采用现代设计方法进行机构设计过程中,机构的运动分析与仿真已经成为计算机辅助工程分析中不可缺少的环节,成为机构设计的必经过程[1]。UG/Motion模块提供了机构运动仿真和分析的功能。
所谓机构运动仿真技术就是借助三维综合性软件建立起来的机构运动模型,用户通过对机构定义连杆、添加运动副、驱动器、弹簧、阻尼器及添加作用力等,使机构的数字模型能跟现实中的机构一样运动起来,以实现机构的运动仿真。此外,通过对机构运动的解算就可以对机构进行运动轨迹、位移、运动干涉及受力等情况进行分析,以达到机构优化设计的目的[2]。本文以高端CAD/CAE/CAM一体化软件UG NX为设计平台,分析自动物料定量分装机构的机构运动仿真的设计方法,该设计方法思路清晰,方法简单。
1 自动物料定量分装机构的工作原理
本文设计的自动物料定量分装机构主要实现物料的定量分装功能(见图1)。不完全齿轮机构主动轮为机构提供动力。不完全齿轮机构主动轮匀速转动带动从动齿轮、花键轴及上物料盘间隙转动,上物料盘上有2个物料桶,下物料盘的物料桶套在上物料盘的物料桶上,下物料盘可以随着上物料盘一起转动。调节齿轮、齿条机构中转动主动齿轮可以带动齿条叉架在机架中上下移动,齿条叉架通过支叉可以带动下物料盘在花键轴上移动,以调节两物料盘上物料桶所围成容积的大小。下物料盘上物料桶的下端装有物料盖,物料盖可以摆动以实现物料桶的开关。需要分装的物料从物料进口进入,物料盘旋转180°后,再从物料出口卸出。物料盖的开关动作由齿条叉架上的空间凸轮控制。
2 创建机构运动分析方案
运动分析方案是创建进行运动仿真的关键,运动分析方案的创建分为3个步骤:创建连杆,创建运动副,定义运动驱动。在UG NX中设计好机构的三维模型后,启动UG NX/Motion(运动仿真)模块,新建动力学仿真,分析类型选择为“动力学”,取消“基于组件的仿真”选项。
2.1 连杆的创建
在机构运动仿真过程中,连杆代表了机构中的运动件,所有的运动件都必须创建为连杆。每个连杆的创建包括定义连杆对象、质量属性、惯性矩、初始运动等。本例中共定义8个连杆,分别为L001、L002、L003、L004、L005、L006、L007、L008,其中,L001定义为机架,为固定件。L002为不完全齿轮机构主动齿轮。L003为不完全齿轮机构的从动齿轮,一体运动还包括花键轴、上物料盘、端盖、螺钉及齿轮内平键等。L004为调节齿轮。L005为带有凸轮的齿条叉架零件。L006为下物料盘。L007、L008为物料盖。如图2所示。
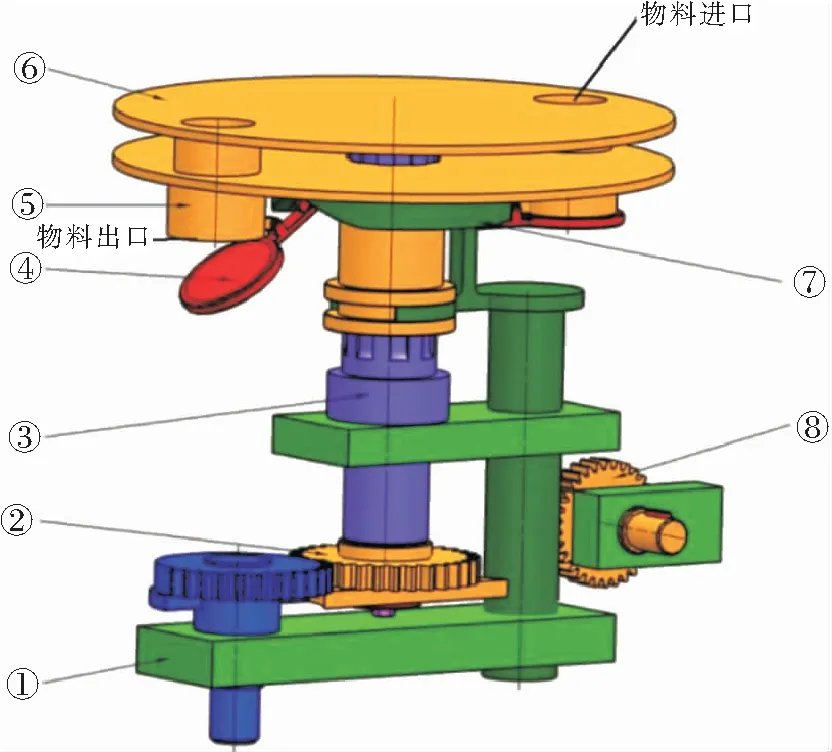
1—机架;2—不完全齿轮机构;3—花键轴;4—物料盖;5—下物料盘;6—上物料盘;7—齿条叉架;8—调节齿轮齿条机构。

图2 定义机构连杆Figure 2 Definition of mechanism link
2.2 运动副的创建
运动副是将机构中连杆连接在一起,从而使连杆一起运动。运动副具有允许所需运动和限制不要运动的双重作用[3]。本例机构中共定义了11个运动副和3个接触连接,其中J001是与地固定运动副。J002、J003、J004分别为L002、L003、L004与L001之间的转动副;J005为L005与L001之间的移动副;J006为L006与L003之间的移动副,设置啮合杆;J007是齿轮齿条副,分别选择移动副J005和转动副J004,设置比率(销半径)为32(见图3);J008为L006与L005之间的转动副,设置啮合杆;J009和J010分别为L008、L007与L006之间的转动副,设置啮合杆;J011为L003与L006之间的移动副;G001为L002与L003之间的3D接触连接;G002、G003分别为L007、L008与L005之间的3D接触连接。

图3 定义齿轮齿条副Figure 3 Definition of gear and rack pair
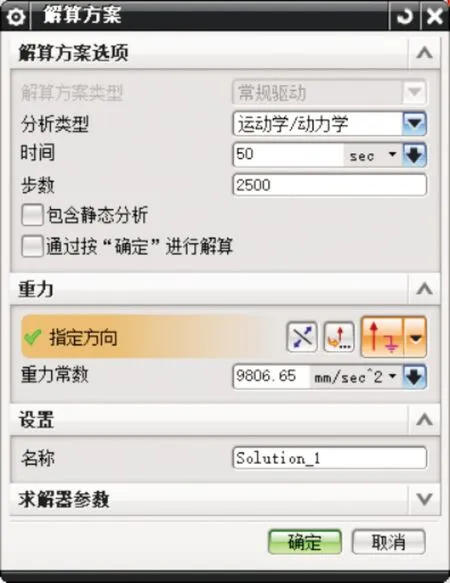
图4 解算方案Figure 4 Calculation scheme
2.3 定义运动副
运动驱动是赋予运动副上控制运动的参数,其中常用的是常规驱动。常规驱动是基于时间的一种运动形式,即机构在指定的时间和步数进行运动仿真,共有5种类型。
1)无:没有外加驱动。
2)恒定:设置运动副的运动(旋转或移动)为恒定状态。
3)简谐:产生一个光滑的周期性正弦运动。
4)函数:使用XY函数编辑器定义的复杂驱动方程。
5)关节运动驱动,设置某一运动副以特定的步长 (旋转或线性位移 )和特定的步数运动[4]。初步规划仿真时间为50 s,由于机构在运动仿真过程中有调整运动,所以在不完全齿轮机构中主动齿轮L002驱动采用函数方式驱动,具体函数为:(STEP(x,0,0,0.001,1)+STEP(x,20,0,20.000 1,-1))×36+(STEP(x,30,0,30.001,1)+STEP(x,49.999 9,0,50,-1))×36,表示为:连杆L002,在0~20 s转速为36°/s,20~30 s转速为0°/s,30~50 s转速为36°/s。调节齿轮的驱动函数为:(STEP(x,22.5,0,22.500 1,1)+STEP(x,27.5,0,22.500 1,-1))×3,表示为:22.5~27.5 s调节齿轮转速为3°/s。
2.4 运动仿真
UG运动仿真的核心是ADAMS解算。进行机构运动仿真时需要输入时间和步数2个参数,设置机构解算方案中时间为50 s,步数为2 500步(见图4)。解算完成后,就可以用动画的形式表现机构的运动方案过程,仿真过程中机构的运动过程如图5所示。

图5 自动物料定量分装机构的运动图Figure 5 Motion diagram of automatic material quantitative packaging mechanism
2.5 生成机构运动仿真动画
为了便于展示机构运动情况可以将运动仿真过程生成运动视频,操作如下:在完成解算计算后观察机构运动过程无误后点击运动控制工具栏按钮中的“导出至电影”功能按钮,设置视频存储位置,确定完成视频的生成。
3 结语
在UG软件完成机构零件设计和装配设计后,应用软件的运行仿真模块通过创建连杆,建立连杆之间的运动副和连接副的关系,再通过函数的方式分段驱动主动齿轮和调节齿轮的分段间隙运动,以实现机构正常工作和调整物料分装量动作的分时运动仿真。根据运动仿真的动画结果表明,该自动物料定量分装机构的设计实现了所需要的运动,达到了预期的设计目标。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
内燃机工程(2021年6期)2021-12-10
装备制造技术(2020年2期)2020-12-14
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
水运工程(2020年2期)2020-02-26
物流技术与应用(2019年6期)2019-07-16
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年3期)2017-06-23
重型机械(2016年1期)2016-03-01