
雷达模拟训练目标航迹建模与仿真技术
2022-01-22 11:21陈春杰
电子测试 2021年24期
陈春杰
(江南机电设计研究所,贵州贵阳,550009)
0 引言
雷达模拟训练中空情想定是首要环节,其为地导部队训练提供了必要条件。空中目标作战样式的多样化,也要求雷达模拟训练系统能够模拟出目标的不同飞行样式。如:远距离支援干扰机在作战防御外盘旋释放干扰达到掩护前突飞机的目的;前突飞机在突防过程中被雷达锁定后,采取“∞”字型、半滚倒转等方式,甩脱雷达的跟踪等。本文重点分析俯冲、爬升、盘旋、“∞”字型飞行航迹,将目标飞行航迹分解为直线段、圆弧机动段,采用轨迹切线连接的方法,建立目标位置数学模型,并仿真验证了该方法的有效性。
1 目标典型航迹分析与建模
1.1 目标典型航迹分析
作战飞机(即目标)在空中执行作战任务时,根据所执行的任务和面临的威胁不同,采取不同的飞行样式,常见的飞行样式有直线、爬升、俯冲、盘旋、转弯、“∞”字型飞行等,如图1所示。
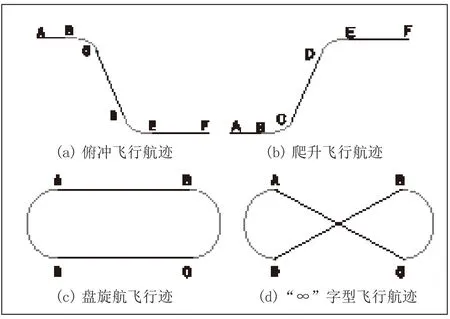
图1 目标典型飞行航迹
从图1中可以看出,目标飞行轨迹均可以划分成直线段AB、圆弧机动段BC、俯冲直线段CD或直线段CD、圆弧机动段DA。因此,可以采用航迹简单化的设计思想,在建立直线航迹和圆弧机动航迹模型后,采用不同航迹段首尾切线连接的方法,可实现目标的不同飞行样式。
1.2 目标航迹模型建立
目标飞行航迹可分解为直线段、圆弧机动段,再将各段端点进行切线连接,可实现不同飞行样式的航迹。在大地直角坐标系下,直线段、圆弧机动段航迹模型如下:
(1)直线飞行航迹
设目标的初始位置参数:斜距Rm0、高度Hm0、航路捷径Pm0、速度Vm0,目标飞行航迹如图2所示AB段,则目标的起始三坐标信息(Xm、0、Ym0、Zm0)为:
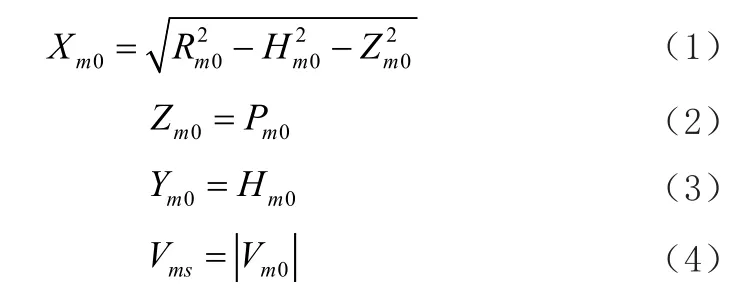
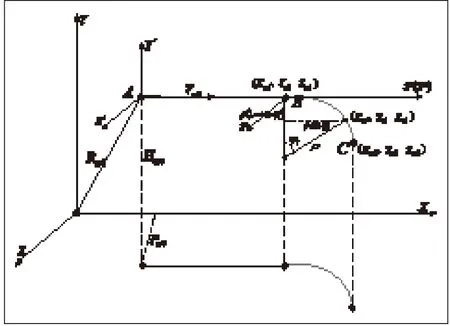
图2 目标飞行航迹
目标在t≤t1时间内做水平直线飞行,目标的实时三坐标(Xm、t、Ymt、Zmt)为 :


将t1带入上式,得到目标的三坐标为(Xm1、、Ym1、Zm1),即直线飞行航迹的终点。
(2)圆弧机动飞行航迹
圆弧机动段目标航迹将以直线飞行航迹的终点为起点,设机动过载系数Ng,则目标机动飞行转弯半径ρ、角速度ω如下:

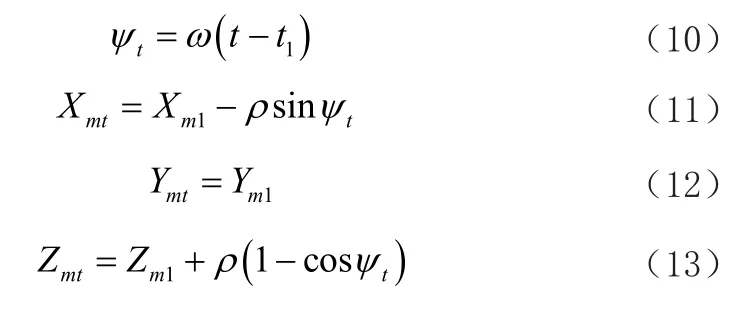
在t1<t≤t2时间内,目标从直线飞行终点(Xm、1、Ym1、Zm1)转机动飞行,目标飞行航迹如图2所示BC段,目标的实时三坐标信息为:
通过上述航迹模型的建立,可实现目标的直线飞行、圆弧机动飞行及两个飞行航迹间的切线连接。在实现更复杂的目标飞行样式时,可同样采用上述方面实现多段直线航迹与多段圆弧机动航迹的切线连接。
2 典型目标航迹仿真
针对第2章的目标航迹模型,本章将以俯冲、爬升、盘旋、“∞”字型飞行航迹为例进行仿真。
(1)俯冲/爬升飞行航迹
设目标的初始斜距80km、高度30km、航路捷径0km、速度200m/s,机动过载2g。俯冲/爬升飞行航迹采用直线飞行段、圆弧机动段、直线飞行段、圆弧机动段、直线飞行段的切线连接实现,仿真结果如图3(a)和图3(b)所示。
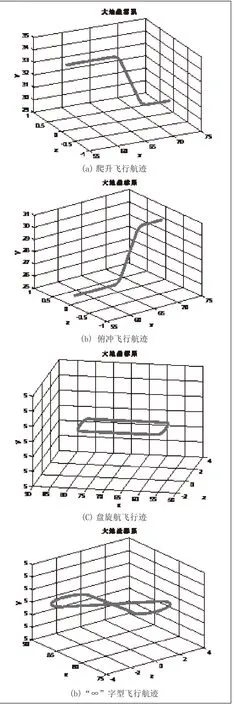
图3 目标飞行航迹仿真结果
(2)盘旋飞行航迹
设目标的初始斜距80km、高度5km、航路捷径0km、速度200m/s,机动过载3g。盘旋飞行航迹采用直线飞行段、圆弧机动段、直线飞行段、圆弧机动段的切线连接实现,仿真结果如图3(c)所示。
(3)“∞”字型飞行航迹
设目标的初始斜距80km、高度30km、航路捷径0km、速度300m/s,机动过载6g。“∞”字型飞行航迹采用圆弧机动段、直线飞行段、圆弧机动段、直线飞行段的切线连接实现,仿真结果如图3(d)所示。
从图3中可以看出,采用直线飞行段和圆弧机动飞行段切线连接的方法进行仿真,可实现目标的俯冲、爬升、盘旋和“∞”字型飞行航迹,且与第2章中设想的目标飞行轨迹一致。
因此,在雷达模拟训练过程中,可以采用复杂航迹简单化的设计方法,通过直线航迹和圆弧机动航迹的切线连接,获得所需的模拟训练目标航迹。
3 结束语
本文建立了作战飞机典型飞行样式的位置数学模型,并通过复杂航迹简单化的设计方法,实现了俯冲、爬升、盘旋和“∞”字型机动飞行航迹的仿真,并给出了仿真结果,仿真结果比较真实地反映了目标机动飞行的运动轨迹,验证了目标航迹模型的正确性。
猜你喜欢
电力勘测设计(2022年2期)2022-03-08
中国惯性技术学报(2019年5期)2020-01-07
制造技术与机床(2018年9期)2018-09-19
中学科技(2018年2期)2018-03-15
测绘通报(2017年2期)2017-03-07
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
新疆农垦科技(2016年2期)2016-08-21
新疆农垦科技(2016年2期)2016-08-21
中国机械工程(2015年13期)2015-12-16
