
基于多传感器协同的导盲与救助系统设计
2022-01-22 11:21韦晓燕
电子测试 2021年24期
韦晓燕
(柳州城市职业学院,广西柳州,545036)
0 引言
我国是人口大国,同样也是世界上盲人数量最多的国家,由于陌生和复杂的环境,往往使盲人的出行安全缺乏最低的保障,使该群体长期面临着出行难的问题,如何有效解决该问题,让盲人群体能够融入社会,提升幸福感和获得感,是一个值得社会各个层面深度关注的问题。目前,引导盲人行走的方式主要有3种:(1)传统的手杖引导;(2)盲道引导;(3)导盲犬引导[1]。随着科技的进步,近期市场上出现了一种人工智能辅助设备——视听转化类智能助视器,它多托于智能语音技术和计算机视觉技术将视觉信息转化为听觉信息,达到帮助视障人士识别文字、钞票、颜色以及躲避障碍物的目的[2]。以上几种方式不管是从适用性还是效益性出发都比较难以满足大多数盲人群体的出行需求。
本文通过多种传感器相互协同,设计出一种包含低洼探测、倒地检测、障碍物检测、环境监控、语音提示、声光报警以及无线救助等功能为一体智能导盲与救助系统。不仅为盲人群体出行提供便利,而且能够实时监测出行时所处的环境,以便在突发状况时使该群体能够得到及时和有效地救助,切实地辅助盲人群体出行。
1 系统设计方案
如图1所示,本设计由导盲杖和救助站两个系统组成。导盲系统由控制与运动系统、检测系统、报警系统、通信系统组成,采用Arduino nano(一种便捷灵活、方便上手的开源电子原型平台)作为控制核心,通过12V可充电锂电池协同电源模块进行电压转换为各个子系统进行供电。救助系统由控制核心、报警系统、显示系统组成。各系统采用模块化设计,将履带底盘用螺杆与螺丝连接固定两层亚克力板搭建的模式进行整体硬件电路布局,以杜邦线进行电路连接,不仅可以使各个模块得以重复利用,减少了电路焊接,便于系统检修,降低了设计和制作成本,而且提高了使用安全性。
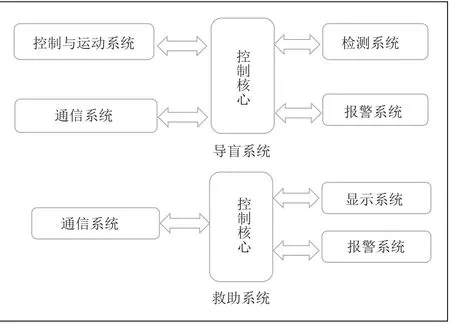
图1 系统设计原理框图
1.1 导盲系统设计
1.1.1 控制与运动系统
本设计采用直流电机驱动4轮履带运动底盘作为底座(如图2),相较于普通四脚轮具有更高的平衡性和稳定性,能够适应复杂地形,更好的贴合行驶路面,而且具备一定的爬坡和越障能力,例如盲道、湿滑路段、砂石路。

图2 4轮履带运动底盘
使用者可通过在操作手把左侧安装的XY双轴摇杆(如图3)自主轻松地控制履带车前进、后退、左拐、右拐,轻便省力,不易偏向,且履带车的行驶速度可由使用者自己控制,实现了由机器带着使用者行走,通过在操作手把处手绳的设计防止盲人使用者在过程中拐杖脱手,从而提高其使用安全性。
图3 把手中的XY双轴摇杆
1.1.2 检测系统
检测系统通过多个传感器协同联动实现低洼探测、障碍物检测、倾倒检测功能。
(1)低洼探测
超声波测距传感器HY-SRF05模块(如图4)探测距离为2cm到450cm,探测频率为500Hz,探测精度可达3mm,将其置于履带车底盘底部最前端,用来实现低洼探测功能,该模块主要由发射器和接收器组成,工作过程中通过超声波发射器向地面发射超声波,在发射时开始计时,碰到障碍物就立即返回。超声波在15℃的空气中的传播速度大约为340 m/s,根据计时器所记录的时间t,可计算得出传感器的发射 点到障碍物之间的距离s,(s=340t/2),超声波接收器接收到反射波则立即停止计时。
通过程序设定,当检测到低洼深度大于20cm时,控制核心向履带车发出指令紧急制动,并触发报警器和语音系统提醒盲人使用者,此时无论使用者再操作XY遥感,导盲杖都不能再前进,从而避免危险的发生。
(2)障碍物检测
通过在第二层搭建的前、左、右三个方向五个方位安装5个光电传感器,来实现多个方向的障碍物探测功能。碰到障碍物就立即返回体积小、精度高、响应速度快、检测距离远以及抗光、电、磁干扰能力强的优点,它是利用被检测物对光束的遮挡或反射,通过同步回路接通电路,从而检测物体的有无,被检物体不仅限于金属,所有能反射光线,或者对光线有遮挡作用的物体均可以被检测,通过将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。
通过调节传感器上的可调电阻来设定合适的安全距离,当传感器检测到障碍物小于安全距离时,控制核心向履带车发出指令紧急制动,并触发声光报警器提醒路人注意避让,通过语音提醒具有听力障碍的使用者遇到的具体情况。
(3)倾倒检测
通过在第二层搭建中间安装水银开关模块来实现倾倒检测功能。水银开关又称倾侧开关,是电路开关的一种,以一接着电极的小巧容器储存着一小滴水银,容器中多数为真空或注入惰性气体。因为重力的关系,水银水珠会向容器中较低的地方流去,如果同时接触到两个电极的话,开关便会将电路闭合,开启开关,从而触发后续电路工作。
当盲人使用者发生摔倒时,手绳拉动导盲杖随之倾倒,水银开关两个电极断开,从而触发报警系统,发出声光报警引起附近路人的注意,来对盲人进行及时施救,同时发送救助信息,联动救助站系统,救助站的工作人员通过无线网络摄像头可以实时观察盲人使用者的情况,以便采取下一步措施。
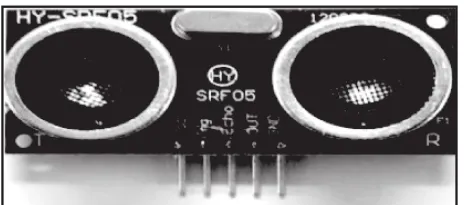
图4 超声波测距传感器
(4)报警系统
报警系统主要由声光报警器、语音识别模块和输出模块、无线网络摄像头组成。声光报警器的使用最大限度的保障了盲人使用者在出行遇到突发状况时得到及时的救助,通过对语音识别模块(LD3320)进行软件编程,能够在导盲杖检测到障碍物时通过语音输出模块发出:“警报!警报!左前(左、右、正前、右前)方检测到障碍物!”检测到低洼时发出:“警报!警报!前方路面凹陷!”准确的语音提示,让盲人使用者能够接收到突发状况的准确信息,方便其作出判断。另外,还可以在存储卡内导入使用者习惯的歌曲,通过语音识别模块可实现语音控制歌曲播放的功能如当使用者对着拾音器说出:“播放XX歌曲”即可通过语音输出模块播放歌曲,实现了MP3的功能从而提升了娱乐性。
在导盲杖杖体的中间固定的无线网络摄像头,可以上下左右旋转,实现全视野监控,救助站的工作人员及盲人使用者的家人可以通过终端连接无线网络摄像头,实时观察使用者所处的环境,一方面提升了救助站在应对突发状况时救助效率,另一方面能够让使用者的家人及时掌握盲人使用者的动态。
(5)通信系统
导盲系统内设置了GSM模块,具有发送SMS短信,语音通话,GPRS 数据传输等基于GSM网络进行通信的所有基本功能,能实时获取使用者所处的位置信息,使用者的家人可以及时关注到其行踪轨迹,掌握其使用状态;通过在导盲系统内设置SIM卡不仅能够为整个导盲系统运行过程中覆盖无线网络,如果盲人使用者迷路可以通过XY双轴摇杆的中心键,将获取的位置信息发送给盲人使用者的紧急联系人,以便快速的找到使用者。
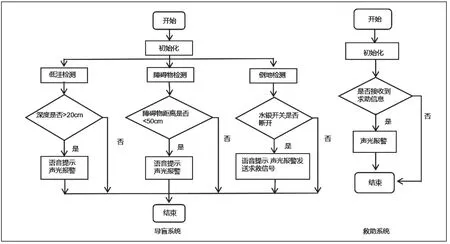
图5 软件程序流程图
1.2 救助系统设计
救助系统的设计目的在于及时有效的接收导盲系统所发出的救助信号,能够与导盲系统组成辅助与救助联动的闭环,可布局在救助站中,便于相关工作人员实时查看使用者的情况,为使用者出行安全提供保障。
救助系统对未来救助站的使用场景进行了模拟设计,将各个模块搭建于一块亚克力板上,整个系统供电电压为220V交流电,通过电压模块将进行电压调节,对各个子系统进行供电。整个系统通过控制核心(arduino nano 芯片)连接控制报警系统、显示系统及通信系统,接收导盲系统中的GPS及GSM模块与发送的信息,形成信息传输的闭环,并触发救声光报警以提醒相关工作人员盲人使用者遇到突发情况,需要及时救助。
整个救助系统的显示功能通过一个树莓派(微信电脑)搭载7英寸显示屏来实现,树莓派是搭载linux系统的一款基于ARM的微型电脑主板,以SD卡为内存硬盘,主板周围有4个USB接口和一个10/100以太网接口,可连接键盘、鼠标和网线,同时拥有视频模拟信号的电视输出接口和HDMI高清视频输出接口,以上部件全部整合在一张仅比信用卡稍大的主板上,具备所有PC的基本功能,只需接通电视机和键盘,就能执行如电子表格、文字处理、玩游戏、播放高清视频等诸多功能。通过在树莓派上连接导盲系统中的无线网络摄像头,即可实时查看使用者所处的环境,能够在使用者发生意外状况时及时响应,从而对使用者进行有效救助。
2 软件设计方案
整个系统的软件设计通过Mixly(一款由北京师范大学米思齐团队基于Google的Blockly图形化编程框架,开发的一款免费开源的图形化Arduino编程软件)进行图形化编程实现。采用嵌套循环语句对各个硬件模块进行编程以实现各个传感器的检测功能,软件程序流程图如图5。
3 结束语
本文所设计的智能导盲与救助系统,通过多种传感器协同工作,不仅可以实现障碍物检测、低洼探测、倒地检测、环境监控、语音提示、声光报警、定位等导盲功能,还可以通过在救助端搭建树莓派接收求助信息,从而实现救助功能。履带的底盘和XY摇杆的设计,更是极大的提升了使用者操作简便性和安全性,可以有效的辅助盲人使用者出行。
猜你喜欢
玩具世界(2022年3期)2022-09-20
客联(2022年3期)2022-05-31
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
小天使·一年级语数英综合(2019年8期)2019-08-27
测控技术(2018年10期)2018-11-25
小学科学(学生版)(2018年11期)2018-11-22
小天使·一年级语数英综合(2017年10期)2017-10-31
小学阅读指南·低年级版(2016年8期)2016-05-14
中学科技(2015年8期)2015-08-08
