模块化多电平换流器改进无差拍电流预测控制
2022-01-22 09:16:08张延彬杨晓峰潘子迅陶海波
北京交通大学学报 2021年6期
张延彬 ,杨晓峰,潘子迅,陶海波
(1.北京交通大学 电气工程学院,北京 100044; 2.新能源与储能运行控制国家重点实验室(中国电力科学研究院有限公司),北京 100192)
伴随我国“2030年前实现碳达峰、2060年前实现碳中和”战略目标的提出,大力发展以风电、光伏为代表的分布式能源已成为必然选择[1-3].电能路由器(Electrical Energy Router, EER)可为分布式能源、储能单元及各种新兴直流设备提供柔性接口,近年受到广泛关注[4-6].模块化多电平换流器(Modular Multilevel Converter, MMC)具有电平数易于扩展,电压谐波含量低等优势常被应用于EER的中高压交直流柔性互联[7-9].但为了应对分布式能源接入及各种新型直流设备接入带来的复杂潮流,EER系统对MMC能量调控的动态性能提出了要求.
常见的MMC电流控制策略有dq解耦电流控制、模型预测控制、无差拍控制等.其中,文献[10-11]采用的同步dq解耦电流控制策略原理简单,易于实现,但环流抑制环节引入的大量比例积分(Proportion Integral,PI)调节器影响了系统控制复杂度.文献[12]提出一种基于MMC的模型预测控制,其优化迭代问题复杂,计算量大,难以实现工程应用.文献[13]研究了一种基于内模原理的控制策略,但引入了内模控制器增益调节因子,增加了调试复杂度.文献[14]采用反馈线性化和滑模控制相结合的复合控制代替电流内环,减少了PI参数,但是其引入的滑模参数整定较为复杂.
无差拍控制由于控制流程简单、电流跟踪能力好等优点受到人们的关注.文献[15-16]考虑控制延时问题,采用两步法无差拍控制实现较好的输出电流谐波抑制效果.文献[17]基于牛顿插值法设计了无差拍控制策略,降低了对电路模型的依赖度.但以上无差拍控制均是基于传统两电平逆变器模型,难以直接应用于MMC.文献[18]研究了一种MMC无差拍控制,实现了输出电流的准确跟踪和环流抑制效果,但由于未考虑控制器及采样延时问题,交流电流畸变较为严重.
为此,本文作者提出一种适用于MMC的无差拍电流预测控制策略,通过预测下一个时刻电流值,实现对输出电流的快速准确跟踪,减少交流侧谐波,并且有效减少了PI调节环节,简化了控制系统复杂度.最后通过仿真结果对本文的理论分析和控制策略的可行性及有效性进行验证.
1 拓扑及工作原理
MMC拓扑如图1所示,每相由上下两个桥臂组成,每个桥臂由n个子模块(Sub Module, SM)和一个桥臂电感构成,其中子模块通常采用半桥和全桥两种典型拓扑,本文以半桥结构展开分析.图中usj为交流侧三相电压,uj为MMC输出三相电压,ij为MMC输出三相电流,ujp及ujn为三相上下桥臂等效输出电压,ijp及ijn为三相上下桥臂流过的电流,Ls及L分别为交流网侧滤波电感及桥臂电感,usm为子模块电容电压,ism为流过子模块电流,Udc为直流侧母线电压,其中j=a,b,c.S1-S4为SM的开关控制信号.
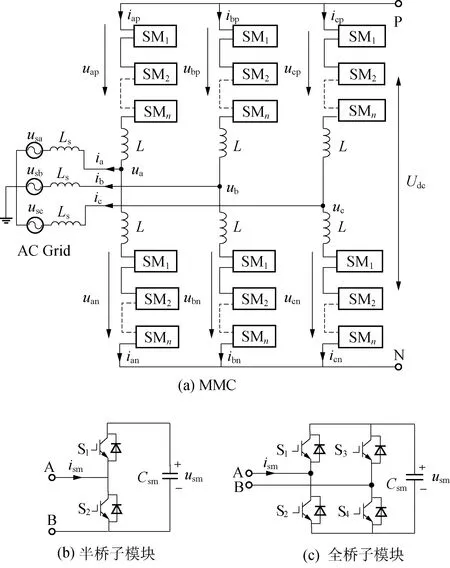
图1 MMC拓扑
MMC工作时,半桥子模块四种典型工作模态如表1所示.ism符合图1(b)所示方向时取1,反之取-1,S1、S2开通时为1,关断时为0.
当子模块按照调制规则以表1四种状态周期运行时,MMC单相桥臂子模块交流输出端口电压之和可以等效为受控电压源,即可得到MMC单相桥臂等效电路如图2所示.

表1 子模块工作模态
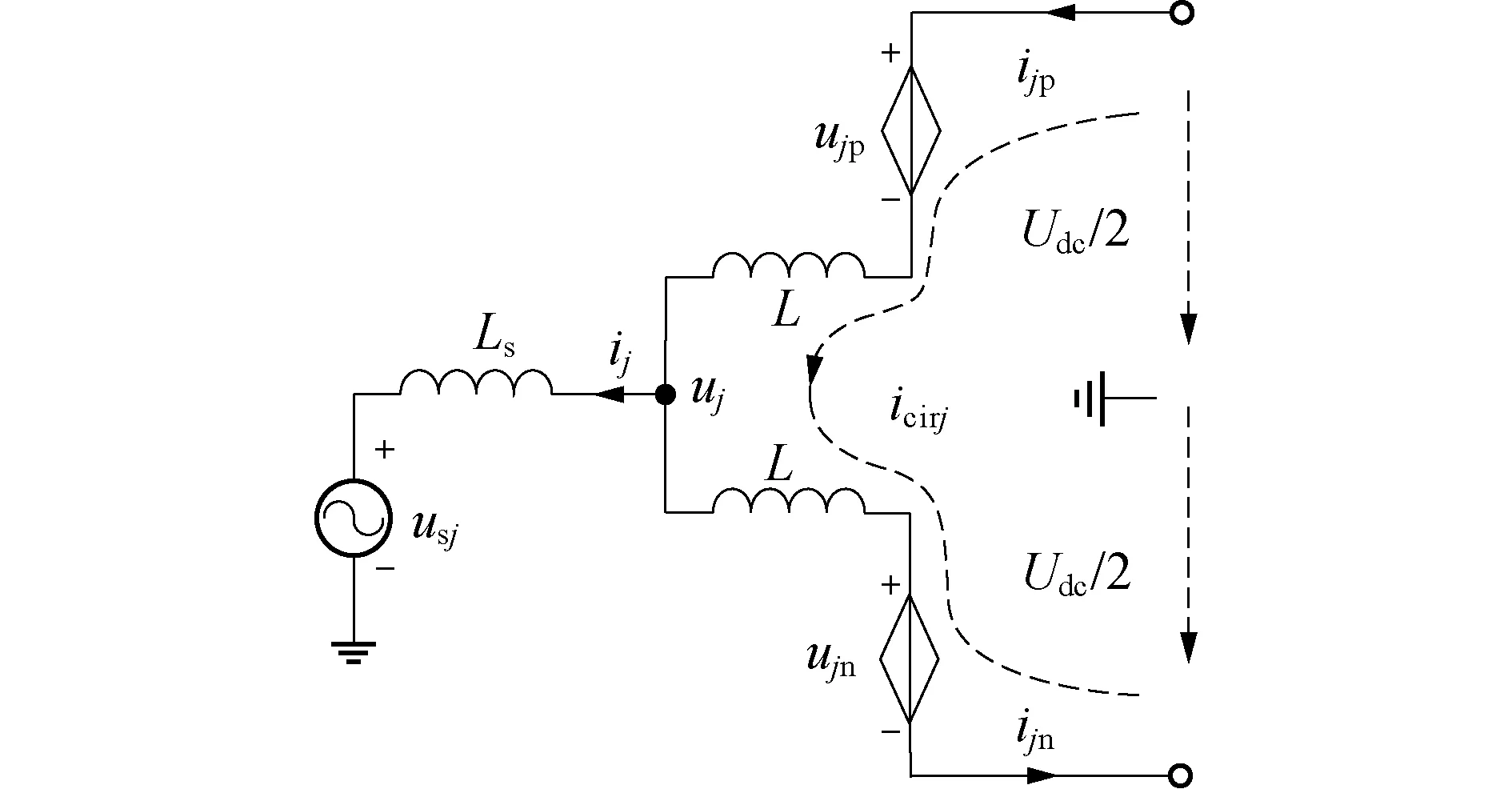
图2 MMC单相桥臂等效电路
对其列写KVL方程,得到MMC单相等效电路模型为
(1)
由于MMC特殊结构,其桥臂电流成分不仅包含基频电流,还包含以直流和二倍频电流为主的环流,表达式为
(2)
式中:icirj为j相环流.
2 传统MMC无差拍电流预测方法
MMC三相对称,故以A相为例,对式(1)进行欧拉离散后可得其离散方程为
(3)
式中:uap(k)、uan(k)及iap(k)、ian(k)为第k个控制周期上、下桥臂应导通的所有模块电压之和及上、下桥臂电流;ua(k)和Udc(k)为第k个控制周期的交流侧电压和直流侧电压;T为系统控制周期.
(4)
式中:iaref是由外环给出的参考值,配合不同外环控制方式实现不同控制目标.环流参考值为
(5)
式中:KP、KI分别为比例、积分系数;s为拉普拉斯域复变量;Ucref为子模块电容电压参考值,Ucave为当前时刻A相电容电压平均值.进而可以得到传统无差拍控制方程为
(6)
由此得到A相传统无差拍控制方式的控制框图如图3所示.
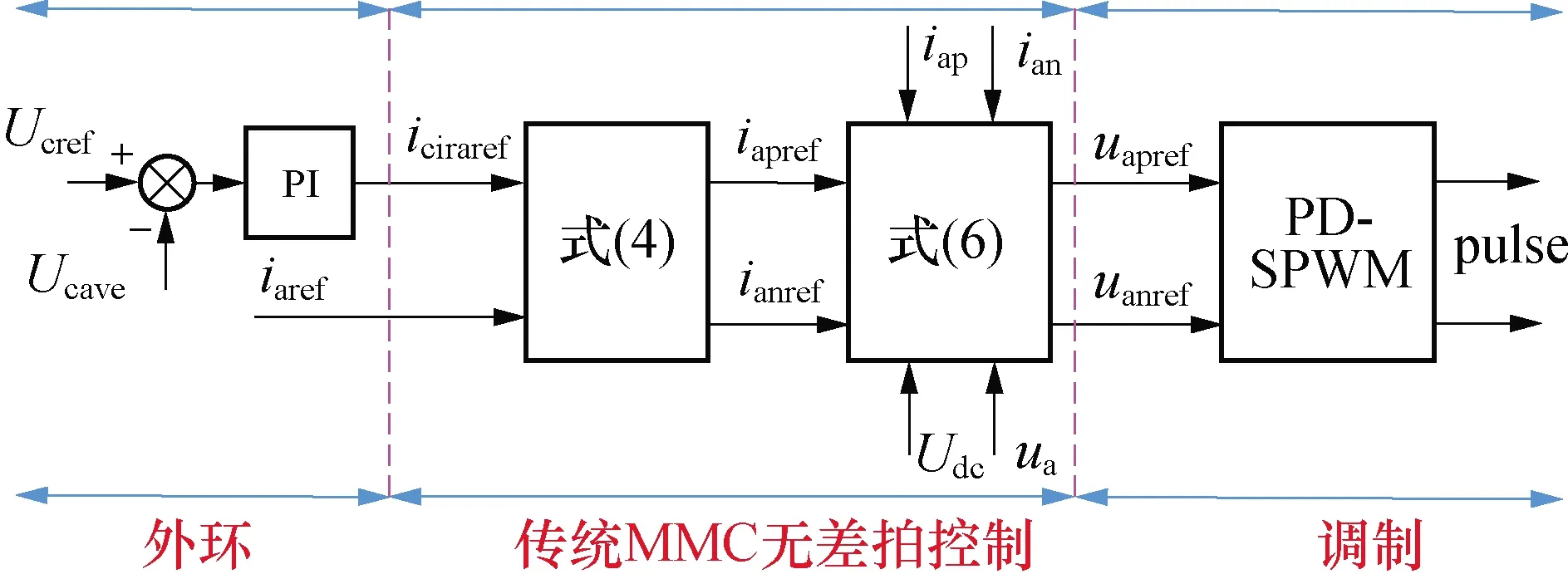
图3 传统无差拍控制框图
整体控制分为外环、传统MMC无差拍控制内环以及调制环节三部分.由外环得到交流侧电流参考值和环流参考值,通过式(4)得到上下桥臂的电流参考值,而后依据式(6),将传统无差拍控制作为电流内环对电流进行跟踪,最终输出上下桥臂电压参考值进行调制,实现控制流程.
3 改进无差拍电流预测控制方法
传统无差拍控制中,认为控制器的采样、算法运算及脉冲的输出是同时进行的,然而由于采样和控制计算存在延时,使得采样的时刻通常超前于脉冲输出时刻,延时时间为td.td将导致控制误差,使得传统无差拍控制不能准确跟踪电流变化,造成网侧电流畸变,示意图如图4所示.在MMC系统中,控制系统复杂,通常控制环节的运算时间大致等于实际应用中断时间,在实际应用中常将td取为控制中断周期T,以100 μs为例进行分析.
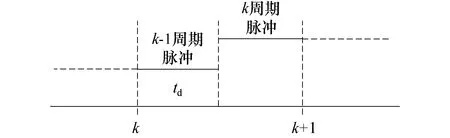
图4 控制延时示意图
理想情况下k周期到来,其脉冲信号需要立刻转变为k周期对应的脉冲,然而由于脉冲是通过控制环节及调制环节产生,因此,常常会延迟td时间输出,导致k周期来临,脉冲仍为k-1周期的脉冲,从而控制产生滞后性,影响控制效果[19].改进算法通过预测k+2时刻电流,控制k周期脉冲可以在k周期前产生,从而避免控制延时的影响[16].
于是将式(3)向后推算一步,得到
(7)
正常稳态情况下,Udc以较小的波动于稳态值附近,故式(7)中Udc(k+1)为
Udc(k+1)=Udcref
(8)
为得到精准预测的ua(k+1),采用插值预测法来估计,鉴于T较小,通常认为ua在k-1周期内的增量等于k周期的增量,即
ua(k+1)-ua(k)=ua(k)-ua(k-1)
(9)
从而得到ua(k+1)的表达式为
ua(k+1)=2ua(k)-ua(k-1)
(10)
式(7)中iap(k+1)和ian(k+1)由式(3)推得.至此代入iap(k+1)、ian(k+1)、ua(k+1)、Udc(k+1)即可得到改进无差拍控制方程为
(11)
故可得改进无差控制如图5所示.
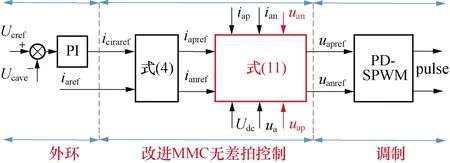
图5 改进无差拍控制框图
为对比改进前后无差拍控制跟踪精度的机理,将式(11)整理后可得改进无差拍控制修正表达式为
(12)
改进无差拍控制方程分为传统MMC无差拍控制方程和误差修正项两部分.传统MMC无差拍控制方程实现主要的控制功能,对桥臂电流进行跟踪,实现系统稳定运行.误差修正项的引入实时修正所产生的调制波,减小控制误差.误差修正项在理想情况下应为0,但由于采样误差、控制器延时等影响,传统MMC无差拍控制产生滞后性,使得误差修正项不为0,从而对其进行实时修正,增加控制精度.因此改进无差拍控制框图亦可如图6所示.

图6 改进无差拍控制框图(修正表示形式)
4 仿真分析
为验证改进无差拍控制策略方案,在MATLAB/Simulink中搭建了三相五电平MMC仿真模型,仿真模型参数如表2所示.
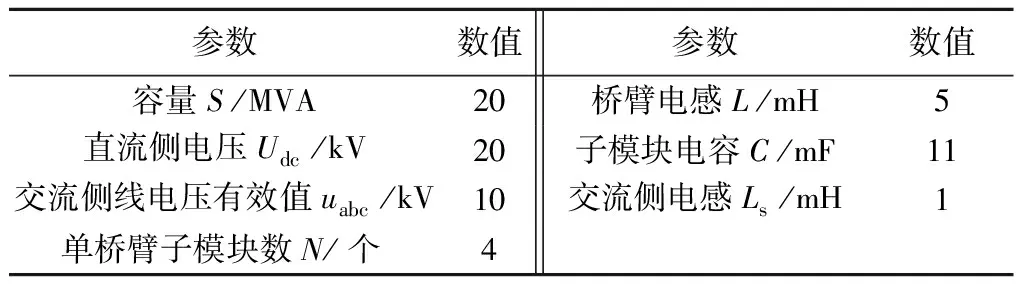
表2 系统主电路仿真参数
4.1 整流及逆变工况下稳态验证
改进无差拍控制下,稳态验证波形如图7所示.整流工况下外环控制直流母线电压及无功功率稳定.稳态时直流母线电压稳定于20 kV,波动范围为0.02 kV,直流侧输出电流稳定于1 kA,直流侧输出功率为20 MW稳定不变,可以实现对电流的准确跟踪.逆变工况下外环控制MMC输出的有功与无功功率稳定.稳态时,MMC交流侧电流稳定于1.6 kA,且正弦度较好,交流侧功率稳定于20 MW,在逆变工况下所提控制能够实现对交流侧电流跟踪.

图7 稳态验证波形
逆变工况下环流抑制前后的波形如图8所示,环流未被抑制前,二倍频环流震荡范围为100~580 A,振幅为480 A,环流抑制后,二倍频环流震荡范围为280~400 A,振幅为120 A,为之前的振幅的25%,对环流的抑制效果明显.

图8 逆变工况下的环流波形
4.2 改进前后电流对比分析
为验证改进算法的优越性,对改进前后的电流波形进行了对比分析见图9,在传统无差拍控制下,其交流侧电流纹波更大,改进算法控制下的电流波形更加精细,畸变程度小于传统无差拍控制策略.
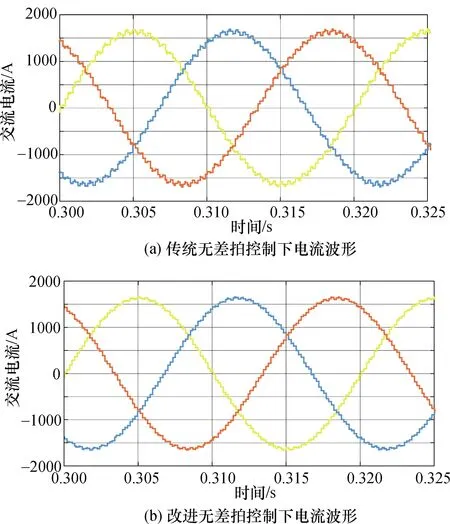
图9 无差拍控制下电流波形对比
改进前后控制策略下交流侧电流傅里叶分析结果如图10所示.

图10 谐波分析
传统无差拍控制下电流中基频成分为1 633 A,电流谐波畸变率为2.62%.改进后的无差拍电流预测方式下电流基频成分为1 633 A,电流THD为2.02%,改进后,电流基波含量相同,电流谐波畸变率下降23%,可见改进无差拍电流预测控制相比较于改进前能够实现更好的电流跟踪,电流畸变率更低.
4.3 动态性能验证
为验证无差拍控制动态性能,对传统dq解耦控制、传统无差拍控制和改进无差拍控制进行对比仿真.0.3 s时设置交流侧电流幅值突增,仿真结果如图11所示.以C相电流为例,阶跃前瞬时电流为1 750 A,阶跃后,瞬时电流应为2 400 A,因此,以C相电流达到2 400 A的时刻为电流跟踪到指令值的时刻.在传统dq解耦控制下,交流侧电流平缓变化,经过0.000 8 s跟踪到指令值.在传统无差拍控制下,交流侧电流迅速变化,经过0.000 4 s跟踪到指令值.在改进无差拍控制下,交流侧电流经过0.000 35 s跟踪到指令值,因此无差拍控制下电流响应速度更优.

图11 电流突增情况下电流响应对比
电流指令突降时仿真波形如图12所示.以C相电流瞬时值由1 750 A变化到800 A的时刻作为电流跟踪到指令值的时刻.当电流给定值阶跃时,在三种不同控制策略下,交流侧电流响应速度分别为0.001 s、0.000 1 s、0.000 08 s.可见无差拍控制下,电流指令突减的情况下,其电流响应速度优于传统dq解耦控制.

图12 电流突降情况下电流响应对比
经过以上仿真分析,相比于传统的dq解耦控制,MMC无差拍控制策略具有更好的动态响应能力,可以实现更快速地跟踪电流指令,其次,所提出的改进MMC无差拍电流控制方案除了具有良好的动态响应能力之外,其还可以减小控制延时的影响,更好地跟踪电流指令,使得电流畸变程度更小.
5 结论
提出一种MMC的改进无差拍电流预测控制算法,其具有以下优点:
1)采用两步法离散电路模型增加了无差拍电流预测的控制精度,原理简单,简化MMC控制系统复杂度,有利于其在EER中的应用.
2)通过在传统无差拍电流控制中叠加误差修正项,避免控制系统延时的影响,实现电流的无差跟踪,电流谐波更少,跟踪能力更强.
3)动态性能更优,提高EER系统的快速调节能力.
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:26
电机与控制应用(2022年4期)2022-06-27 06:29:22
电机与控制应用(2022年4期)2022-06-27 06:29:18
粮食问题研究(2022年2期)2022-04-25 22:50:57
中国实用神经疾病杂志(2018年9期)2018-05-25 01:01:08
数学物理学报(2018年2期)2018-05-14 07:32:01
儿童故事画报·智力大王(2016年6期)2016-09-14 07:12:55
电气传动(2015年4期)2015-07-11 06:10:56
电测与仪表(2015年21期)2015-04-09 11:51:56
中国医药导报(2015年20期)2015-01-11 03:01:27