
铁道车辆主动悬挂系统模糊控制策略研究
2022-01-22 07:41向银强王磊薛萍
机械工程师 2022年1期
向银强,王磊,薛萍
(中车南京浦镇车辆有限公司,南京 211800)
0 引言
列车在运行的过程中受轨道不平顺和空气动力的影响,从而产生振动和冲击。另外,车辆在加速、减速及转弯和制动时会产生倾覆力、侧倾力和响应的力,这些力和力矩可使车身产生俯仰和侧倾的振动[1]。这些振动或者冲击会严重影响车辆的稳定性和乘坐的舒适性[2]。主动悬挂系统的模糊控制正是针对这一问题发展起来的新技术[3]。在以往的研究中,门限开关控制、预测控制和优化控制等控制策略常被用来抑制车体的垂向振动[4-5]。对于这些控制策略而言,门限开关的控制速度快,但是难以选择门限;预测控制的计算量大,对模型的依赖性比较强;而优化控制的实时性又比较差[6]。轨道车辆的悬挂系统是一个模型时变、强耦合的非线性动力系统,根据需要外部能量的多少可将车辆系统的悬挂方式分为被动悬挂、半主动悬挂和主动悬挂[7-8]。本文提出了一种基于模糊控制的主动控制策略,对轨道车辆的主动悬挂系统进行研究。
1 悬挂系统建模
本文以1/4轨道车辆车体为研究对象。假设车体和转向架沿纵向和横向对称分布;悬挂系统的减振器和弹簧型号相同,车身和转向架的重力分布在每个减振器上是相同的;仅考虑车辆系统垂直方向的运动。这样就将轨道车辆系统简化成二自由度力学模型, 如图1所示。其中m2指1/4车体质量,kg;m1指转向架构架质量的一半,kg;x1为转向架构架的垂向位移,m;x2为车体垂向位移,m;x0为轨面输入垂向位移,m;F2为二系悬挂系统的非线性弹簧力;F1为一系悬挂系统的非线性弹簧力;k1、k2分别为一系和二系悬挂系统的弹簧刚度系数,N/m;c1和c2分别为一系和二系悬挂系统的液压减振器的阻尼系数,N·s/m;x0为轨面激励输入;ξ为弹簧的非线性系数。此处将轨道激励输入x0考虑简谐激励,即x0=Acos(ωt)。
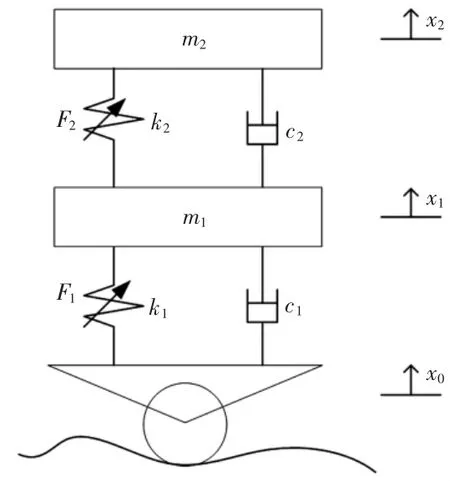
图1 轨道车辆悬挂系统力学模型
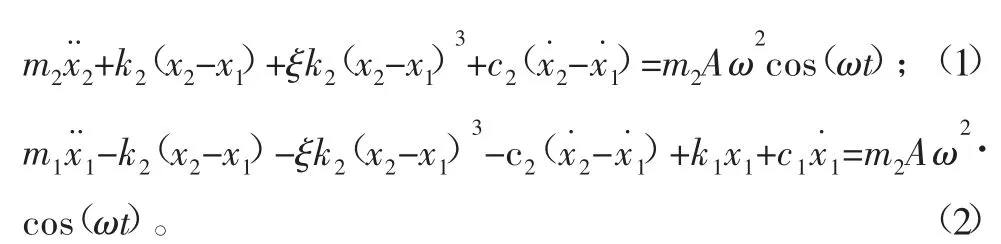
建立运动微分方程:
2 悬挂系统仿真模块
2.1 轨道不平顺
美国6级轨道谱以空间频率的形式表示轨道高低不平顺。根据铁路能承受的最大运行速度及平顺状况将轨道级别分为6个等级,其波长范围可达1.524~304.800 m[9]。美国轨道谱高低不平顺参数如表1所示。
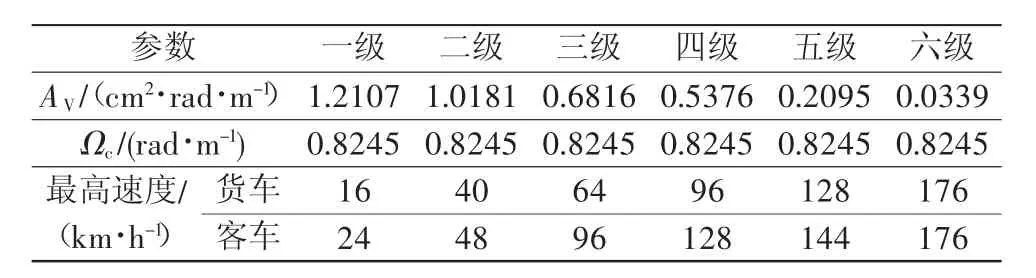
表1 美国高低不平顺参数
轨道高低不平顺可表示为
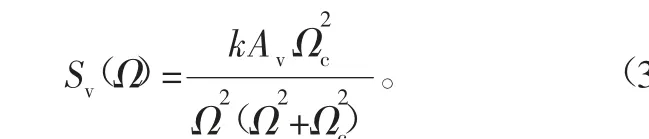
式中:Sv(Ω)为高低不平顺功率谱密度,cm2/(rad/m);Av为粗糙度常数,cm2·rad/m;Ω为空间频率,rad/m;Ωc为截断频率,rad/m;k为安全系数。
用MATLAB/Simulink建立美国6级轨道的仿真模块图,如图2所示。从MATLAB中的Workspace把白噪声响应引入仿真。
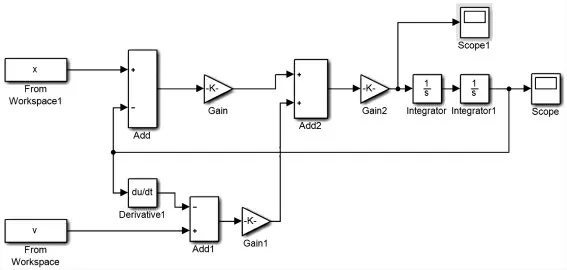
图2 美国6级轨道谱的MATLAB/Simulink仿真模块
美国6级轨道谱的MATLAB/Simulink仿真模块的时间间隔取10 s,起始位移和起始速度均取30 m/s,得到美国6级轨道不平顺位移响应(如图3)和速度响应(如图4)。
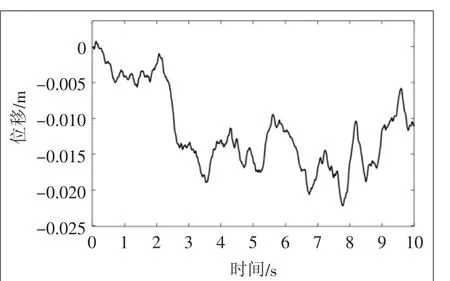
图3 美国6 级轨道不平顺时域图

图4 美国6 级轨道速度输入图
2.2 悬挂系统模糊控制模块
设计模糊控制器是模糊控制最重要的一个环节。确定控制器的输入输出变量是第一步。根据1/4车体悬挂系统控制特性和性能要求,以振动加速度的偏差E和偏差变化率EC作为控制器输入变量,以控制器的输出量F作为主动悬挂系统控制力,构成一个二维输入、单输出的模糊控制器。模糊控制模块设计如图5所示。
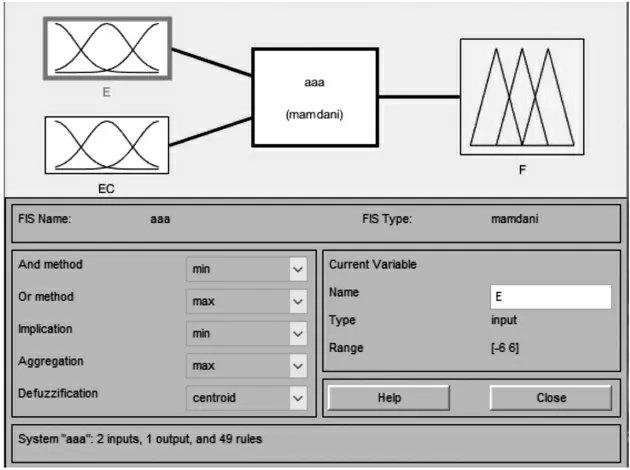
图5 模糊控制模块设计
在两自由度主动悬挂系统的基础上加上模糊控制环节构成基于模糊控制的主动悬挂系统。以美国6级轨道谱为输入。被动悬挂的Simulink仿真模块如6图所示,主动悬挂系统模糊控制的Simulink仿真模块图如图7所示。
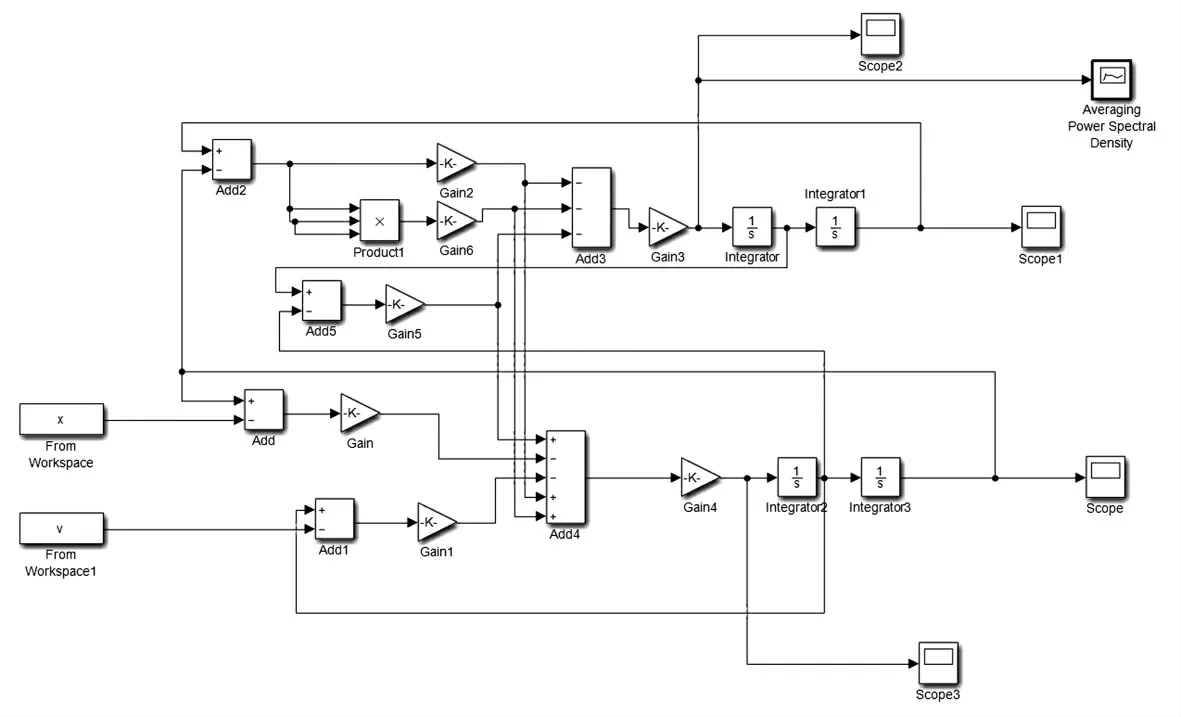
图6 两自由度被动悬挂仿真模块图
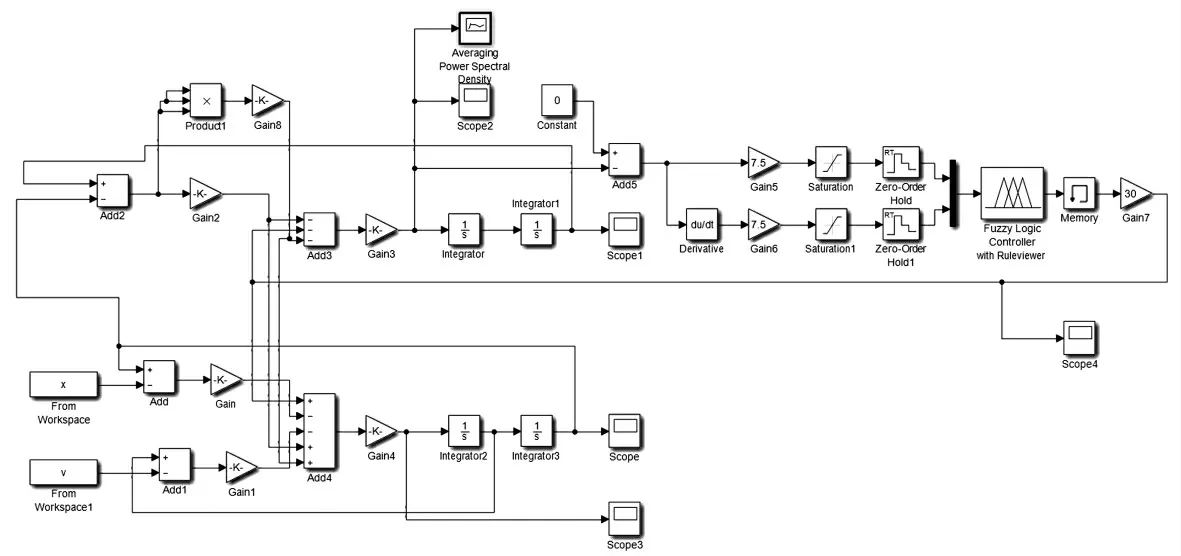
图7 主动悬挂模糊控制仿真模块图
3 仿真结果与分析
以某型号客车为例,列车技术参数如表2所示。以美国6级轨道谱为输入条件,在被动悬挂和主动悬挂2种工况下,分别计算车体垂向加速度和加速度功率谱。其中,对于主动悬挂系统,采用模糊控制策略。2种不同工况计算得到的车体垂向振动加速度如图8所示。

表2 车辆系统参数
从图8可以看出,采用被动悬挂系统的车体垂向振动加速度振幅明显比采用模糊控制后的主动悬挂系统大,说明采用模糊控制的主动悬挂系统能够有效地抑制轨道不平顺引起的车体振动。
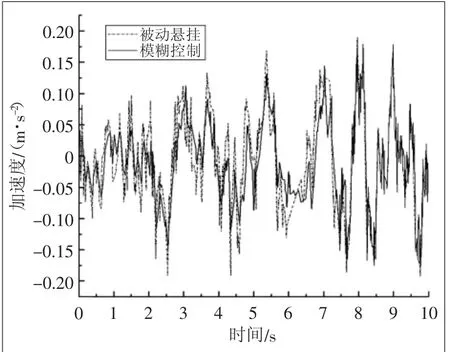
图8 被动悬挂和主动悬挂系统模糊控制车体加速度
图9和图10分别给出了采用被动悬挂系统和模糊控制的主动悬挂系统的车体垂向振动加速度功率谱。从图中可以看出,采用模糊控制的主动悬挂系统的平稳性良好,车体垂向振动加速减振明显。在0~10 Hz的频率段,采用模糊控制的主动悬挂系统的加速度功率谱幅值明显降低,降幅为10%左右;在10~30 Hz频率段,采用模糊控制的主动悬挂系统的加速度功率谱幅值降低到0左右。说明相比被动悬挂系统而言,采用模糊控制的主动悬挂系统能够较好地抑制车辆系统受外界激励导致的垂向振动,能够较好地提高列车的平稳性和舒适性。
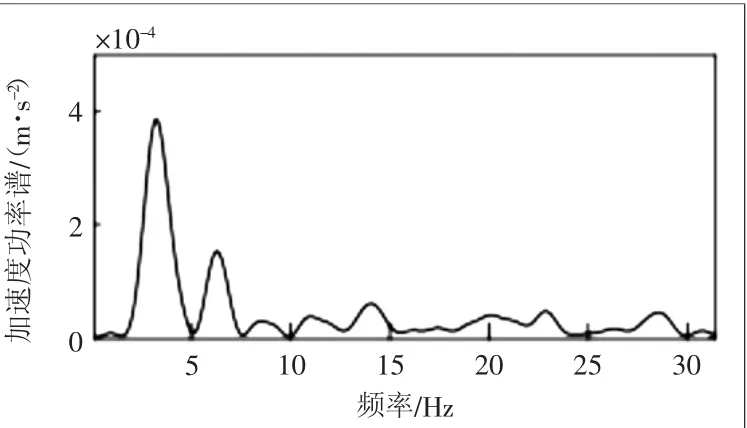
图9 被动悬挂系统加速度功率谱图
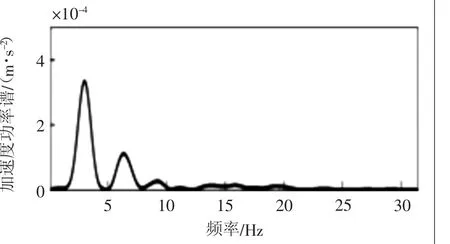
图10 基于模糊控制的主动悬挂系统加速度功率谱图
4 结论
基于MATLAB/Simulink仿真模块建立了轨道车辆主动悬挂系统模糊控制模型,并以美国6级轨道谱为输入,对比分析了被动悬挂系统和基于模糊控制的主动悬挂系统对载荷激励的响应。研究表明,采用模糊控制的主动悬挂系统的车体垂向加速度幅值明显减小,在低频(0~10 Hz)和高频(10~30 Hz)频段,都能有效地抑制车体的垂向振动。表明使用模糊控制的主动悬挂系统能够有效提高车辆的运行平稳性和乘坐舒适性。
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18
汽车工程师(2021年12期)2022-01-17
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
今日农业(2019年12期)2019-08-15
电子制作(2016年21期)2016-05-17
专用汽车(2016年12期)2016-02-11
汽车零部件(2015年5期)2015-01-03
山东工业技术(2014年20期)2014-10-21
计算机辅助工程(2012年5期)2012-11-21
