
建模与仿真课程中对模型后处理及其二次建模的教学必要性与方法探讨
2022-01-22 10:04钱惠敏
科技视界 2021年36期
周 军 钱惠敏
(河海大学能源与电气学院自动化系,江苏 南京211100)
0 引言
自动化专业建模与仿真课程教学是以机理建模方法与步骤为中心的[1-5]。教学内容与方式固然有面向实际具体形象,教师易解,学生易学的一面。但缺乏对原始模型后处理技术与方法的说明,更鲜见从原始模型获取二次模型探讨,或将这几方面分开讲解。当学生进入信号与系统、自动控制原理、计算机控制系统、线性系统理论等专业课时[6-10],依然对物理对象与数学模型关系有陌生感。原因是:建模与仿真课程中以机理建模时,对象要素与模型形式的关系是明确的。但专业基础课数学模型一般并非原始模型,而是经数学加工后的标准二次模型,已无与对象要素的直接联系,学生自然困惑:建模与仿真到底建立了什么模型?传递函数等标准二次模型又是从何而来的?
根据多年教学经验与体会,笔者认为学生对建模与仿真课程及其后续专业课的反差感、跳跃感是由于教学中对原始模型后处理技术、二次模型导出与特性分析缺失。笔者在试卷中设计了关于模型后处理和二次建模的试题,要求学生讨论诸如:基于原始模型说明控制机理与效果,二次模型和物理机理关系等。但能清晰、准确掌握原始模型与二次模型关系的学生不多于20%。这说明该部分教学缺失导致学生对建模技术与数学模型特性的理解困难。
建模与仿真课程的主要教学内容是,通过机械类、电气类、运动类案例,建立基于机理的微分方程模型的方法与步骤,不涉及原始模型后处理,如平衡点分析、动态拟合、线性化近似等,更不涉及二次模型推导与特性解析,如模型辨识、传递函数、频率特性及其参数等。因此,本文以行车垂直圆摆为例,机理建立原始模型,实施后处理,讨论二次模型及其特性,以此说明建模后处理和二次模型知识点教学的必要性,对教学方式也做了讨论。
1 控制系统建模的主要模型后处理技术
1.1 基于机理建模和原始模型
图1的水平行车垂直圆摆系统忽略了摩擦力和空气阻力,建立状态微分方程模型。

图1 行车垂直圆摆系统
图中符号定义如下:M为行车质量;m为摆球质量;g为重力加速度;l为摆杆长度,无质量;F为行车外力;fh,fv为摆杆对摆球的支撑力分量;ρ,θ为行车对固定坐标位移,摆杆与行车垂直轴的夹角。
根据行车和摆球的水平方向受力,牛顿第二定律给出:

考虑摆球绕轴旋转的切线方向,圆周运动方程为:

最后,由式(1)和(2),选择状态变量x1=ρ,x2=ρ˙,代数消除fh,得
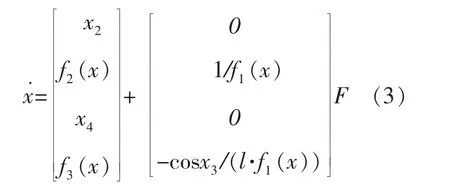
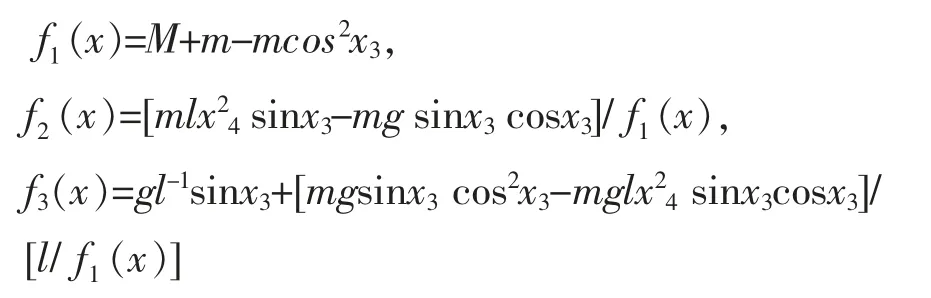
其中,x=[x1,x2,x3,x4]T∈R4,且,
式(3)是非线性微分方程。F=0时的平衡点方程0=[x2ef2(xe)x4ef3(xe)]T,∀t≥0。于是,平衡点为,xe=[c,0,x3e,0]T∈R4,∀c∈R,x3e=kπ,k=0,±1…,对应两组角度周期性变化的平衡点,即。也就是说,水平轨道任何点,速度为零,摆杆倒立或下垂就平衡了。
1.2 原始模型的主要后处理技术
首先,原始模型曲线拟合线性化后处理。若摆杆与上平衡点有小偏角,摆角速度慢。由三角函数性质,sinx3≈x3,cosx3≈1。代入式(3),有

A∈R4×4和B∈R4×1,即系统在上平衡点可由线性定常模型描述。又xe(t)∈N(A),rank(A)=3<4,模型(4)的平衡点有无穷多个,与原始模型平衡点性质一致。
其次,考虑式(3)在上(下)平衡点的切线线性化。在上平衡点xeupper=[c,0,0,0]T的Jacobian阵为:

在下平衡点xelower=[c,0,π,0]T的Jacobian阵为

以下记为A(L)。若L=-(M+m)g/(Ml),A(L)=Aupper,若L=(M+m)g/(Ml),A(L)=Alower。
模型(4)的输入矩阵是原始模型(3)的输入部分在平衡点处赋值的结果,即
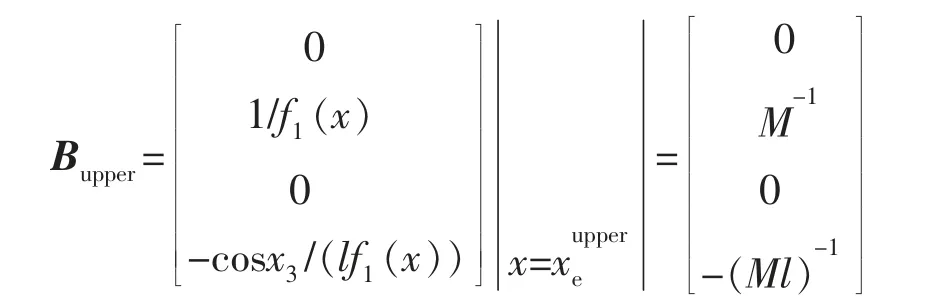
类似地,有Blower=[0M-10 (Ml)-1]T。对应上(下)平衡点的输入矩阵是不同的。
总之,上(下)平衡点的线性化模型分别是
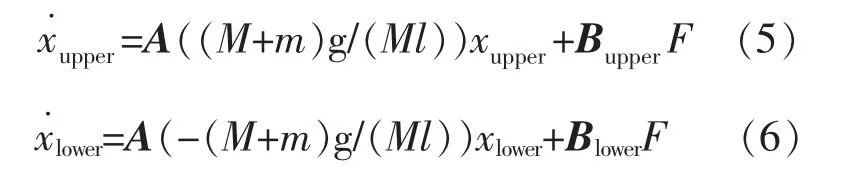
且xupper∈R4,xlower∈R4。
1.3 原始模型与线性化模型特性讨论
线性化模型(5)和(6)中,xe=[c,0,0,0]T都是平衡点,但是式(5)的平衡点与原始模型(6)的上平衡点一致;式(6)的平衡点与原始模型(3)的下平衡点不一致。
式(5)和(6),若A(L)对应上平衡点,特征值为s1=s2=0,s3,4=±((M+m)g/(Ml))1/2,上平衡点不稳定[11]。若A(L)对应下平衡点,s1=s2=0,s3,4=±j((M+m)g/(Ml))1/2,下平衡点稳定与否不确定。
2 原始模型的二次模型的传递函数及其特性
本节举例说明对原始模型的线性模型二次建模的必要性及其基本特性。
2.1 二次模型的传递函数
以图1的水平行车位置x1=ρ为输出观测量,则输出方程为

或以摆角x3=θ为输出观测量,则输出方程为

这样,模型(5)或(6)和输出方程(7)给出的上(下)平衡点的二次模型传递函数为

类似地,模型(5)或(6)和式(8)给出的二次模型传递函数为

2.2 传递函数的主要特性
基于式(9)和式(10),观察作为二次模型传递函数及其性质:
模型(4)是4阶微分方程,C1(s)为四阶传递函数,但C2(s)为2阶传递函数;
模型(5)或(6)的4个特征值作为极点全部出现于C1(s),但C2(s)仅包含s3,4的两极点。因此,C1(s)是不稳定的,而C2(s)至多临界稳定。
模型(5)和(6)的可控性/可观性。构造可控性矩阵,得可控性秩条件:

于是,模型在上下平衡点都是可控的。即外力F可以控制行车状态。
其次,构造模型(5)和输出方程(7)的可观性矩阵。可观性秩条件为:

线性模型在上(下)平衡点都是可观的,即基于行车位置测量可推算状态。
最后,构造模型(6)和输出方程(8)的可观性矩阵。于是,可观性秩条件为:

线性模型在上(下)平衡点都不是可观的,基于摆角测量无法推算状态。
3 数值仿真与结果验证
利用Matlab仿真验证。对图1系统设定:M=1kg;m=0.1 kg;g=9.8 m/s2;l=0.5 m;F=A sinωt,A=0.2,ω=0.04 rad/s;初始位置ρ(0)=0,θ(0)为[-10°,10°]的随机值。各图实线为原始模型行车位置(绿),速度(红),摆角(黑)和角速度(蓝),线性模型的相应状态量为虚线,颜色含义相同。
由图2和图3可知,对于上(下)平衡点处的线性模型都能在一定时间范围内准确反映原始模型的响应特性。比较而言,下平衡点的线性模型(6)对原始模型动态近似度更好,偏差较小的时间区间更长。与此相对,上平衡点的线性模型(5)只能在平衡点摆角很小,短时间内有很好近似。

图2 上平衡点附近原模型与线性模型(5)的响应对比
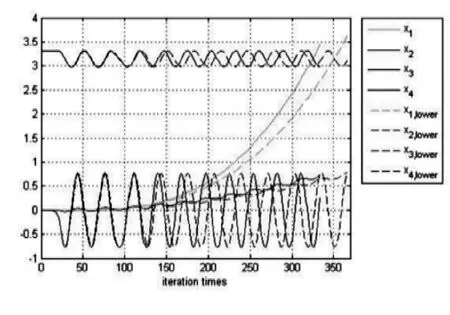
图3 下平衡点附近原模型与线性模型(6)的响应对比
图4说明,在上平衡点附近,摆臂一开始左右摆动,之后绕轴旋转;行车速度渐大,离开初始位置也渐远,摆角进入稳态后周期变动;与此相对,行车位置和速度无周期性;换句话说,利用摆角测量无法确定行车位置和速度。这是上平衡点线性模型不可观的物理原因。

图4 上平衡点附近非线性系统的响应
图5说明,在下平衡点附近,摆臂始终左右摆动,没有发生绕轴旋转;同时行车速度渐大,离初始位置渐远。摆角曲线具周期性而行车位置与速度无周期性,即摆角速度与行车位置和速度无直接关系。这是下平衡点线性模型不可观的物理原因。
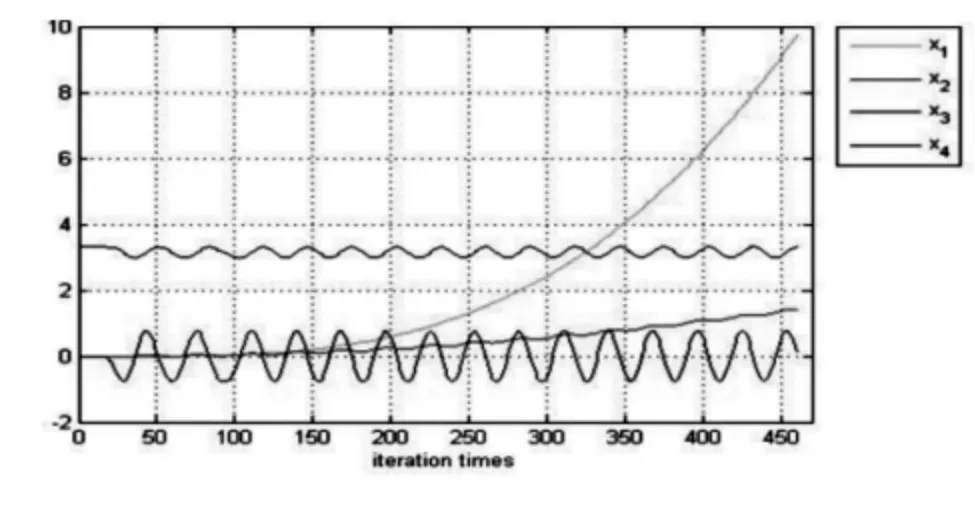
图5 下平衡点附近非线性系统的响应
仿真反映的模型稳定性、可控性、可观性与行车垂直圆摆系统的物象关系一目了然。对原始模型线性化,二次模型及其特性讨论,有助于学生对建模工程意义与模型数学本质的理解与认识。
4 教学方法探讨
通过对行车垂直圆摆系统的机理建模、模型后处理及二次模型导出与性质讨论,本文试图明晰建模与仿真课程教学中,补充和完善模型后处理和二次模型的必要性和重要性。建议教学过程如下:
(1)基于已有建模案例补充与完善,无须使用全新案例。对后处理技术和二次建模,以满足后续专业课程对数学模型基本要求为准,以便学生建立从工程实际到专业基础的系统和有机的理解。
(2)模型后处理应结合复杂控制工程问题示例。就自动化专业而言,线性化和模型简化是最起码的知识点。
(3)二次模型应集中于后续课程的标准模型上,以便学生学习从实际中提炼理论,在各专业课建立知识点联系与融合,强化学习效果。就控制系统建模而言,应讲解线性定常微分方程或传递函数模型。
(4)二次模型涉及的模型概念应以形象化,工程化的感性说明为主,而非数学定义与意义阐述。比如,对稳定性、可控性、可观性概念,并不建议在建模与仿真课程中讲授,而是教师基于先验知识,从物象和实验角度,引导学生的物理常识的理解。
教学实践表明,建模与仿真课程中若只讲授机理建模的方法与步骤,学生可熟悉和理解机理与原始模型的关系。一旦脱离实际对象,学生依然会被抽象数学模型困惑。通过模型后处理技术和二次模型的学习,学生才有机会理解原始模型的类型,性质所蕴含的数学本质,才能体会二次模型的数学概念的工程意义,才能理解机理与数学模型的联系与区别。本文希望能对建模与仿真课程的教学与研究有新的启发。
猜你喜欢
中等数学(2020年2期)2020-08-24
烟台果树(2019年1期)2019-01-28
测控技术(2018年7期)2018-12-09
测控技术(2018年9期)2018-11-25
传媒评论(2018年7期)2018-09-18
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
IT时代周刊(2015年7期)2015-11-11
电测与仪表(2014年11期)2014-04-04
