动力电池等效电路模型研究*
2022-01-21 00:32郭向伟许孝卓
传感器与微系统 2022年1期
郭向伟, 高 岩, 司 阳, 刘 震, 许孝卓
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
新能源汽车是我国应对能源和环境挑战的战略性新兴产业。锂离子电池因其工作电压高、自放电率低、充放电效率高、循环寿命长等优点被广泛应用于新能源汽车领域[1]。动力锂电池充放电过程电化学反应复杂,影响因素多且随机性强。为准确的表述动力电池的动态特性,建立精确可靠的状态估计方法,精确的动力电池建模必不可少[2~4]。电池建模既要能准确反应电池的特性,又要满足嵌入式系统对程序设计简单易行的要求。常见的动力电池模型包含电化学模型、等效电路模型和黑箱模型等[5]。其中等效电路模型以理想的电气元件描述动力电池的动态响应,以恒压源表征电池的静态特性,以RC网络描述动力电池的动态极化效应。具有模型方程简单,参数辨识方便,实时性好等特点,广泛应用于各类动力电池状态估计方法[6~8]。近年来,国内外学者提出了多种多样的等效电路模型[8,9],如Rint模型、Thevenin模型、PNGV模型(partnership for new generation of vehicles model)、双极化(dual polarization,DP)模型以及多阶RC模型等,理论上多阶模型相比于其他模型具有更高的精度,但在应用过程中,由于其需要辨识的参数增多,且各参数不可避免地存在误差,使得多阶模型在精度和运行速度上均无优势[7]。本文针对应用最为广泛的Thevenin模型和DP模型展开研究。
目前,较多文献在利用等效电路模型时,都是直接引用,并未对最优等效电路模型研究分析[10~12]。本文以此为出发点,基于模型精度和运算速度建立模型评价方法,得出Thevenin模型相比于DP模型能够在精度和速度方面取得更好的平衡,只有当精度权重因子大于2倍的速度权重因子时,才适合采用DP等效电路。本文为动力锂电池状态估计的研究提供了重要的理论基础。
1 等效电路模型
Thevenin模型如图1所示,iL为流经动力电池的电流(设放电时电流符号为正,充电时电流符号为负),Uoc为动力电池的开路电压,R0为电池欧姆电阻,R1为电池极化内阻,R1C1环路用于模拟电池极化效应。

图1 Thevenin等效电路模型
由电路结构可知
(1)
DP模型如图2所示。该模型由三部分组成:开路电压Uoc表示动力电池的开路电压;R0表示电池的欧姆电阻,由电极材料、电解液及其他电阻组成;RC环路:用两个阻容环节叠加的方式来模拟电池的极化过程,用于模拟电池充放电结束,端电压突变之后趋于稳定的过程。
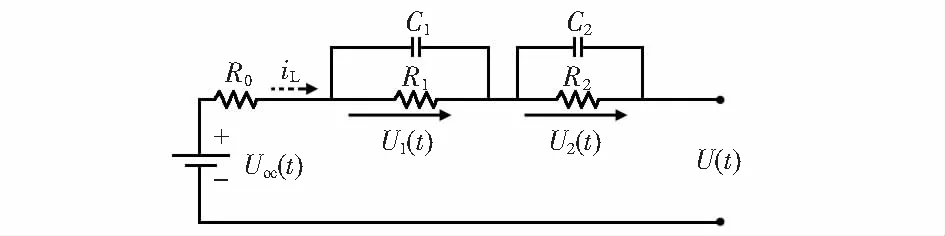
图2 DP等效电路模型
由电路结构可知
(2)
综合上述可知,Thevenin模型和DP模型的差别在于模拟极化效应的电路结构不同,即RC环路数量的不同。
2 模型参数辨识
模型参数辨识过程,需要用到开路电压—荷电状态(open circuit voltage-state of charge,OCV-SOC)曲线,首先进行OCV-SOC曲线的标定,其次以DP模型为对象进行参数辨识的分析。
2.1 OCV-SOC标定实验
实验对象为标称电压为3.7 V,充电截止电压4.2 V,放电截止电压2.8 V,额定容量3 200 mAh的18650型三元锂电池,SOH为1,环境温度25 ℃。电池测试系统由上位机、电子负载、示波器等组成。
分别标定0.2,0.3,0.4,0.5,0.6,0.75,1C恒流间歇放电条件下的OCV-SOC曲线。每组标定步骤如下:1)采用先恒流(0.2C)后恒压(截止电压4.2 V)的方式对电池进行充电;2)对电池进行恒流、恒容量(320 mAh)放电;3)放电结束,静置1 h,记录静置结束后电池端电压,即为OCV;4)重复步骤(2)、步骤(3),至电池放电结束。
如图3所示为采用6次多项式拟合后OCV-SOC的标定实验结果曲线。从图中可以看出,在SOC大于10 %的情况下,各条曲线几乎重合,说明在同样的温度、SOH条件下,不同放电倍率对应的OCV-SOC关系曲线相似,可以用其中任意一条曲线代表。

图3 不同倍率恒流间歇放电OCV-SOC曲线
由于充放电电流越小,极化效应对电池的影响越小,本文选取0.2C恒流间歇放电条件下的OCV-SOC曲线作为参考曲线,函数关系如式(3)所示
Voc=b1×SOC6+b2×SOC5+b3×SOC4+b4×SOC3+
b5×SOC2+b6×SOC+b7
(3)
式中b1,b2,…,b7为多项式的拟合系数,b1=3.561,b2=-14.048,b3=32.961,b4=-39.456,b5=23.766,b6=-5.694,b7=3.112。
2.2 模型参数辨识
Thevenin模型和DP模型的差别在于RC环路数量的不同,Thevenin模型用一个RC环路描述极化效应,而DP模型用两个RC环路描述电池极化效应,参数辨识的原理一致,这里以DP模型为例,进行参数辨识的研究。如图4所示为锂电池放电结束端电压响应曲线示意图。

图4 放电结束端电压响应曲线
图4(b)中V1-V0这个过程是放电结束后,电池内部欧姆电阻上产生的压降消失的过程,对应图4(a)中区域①,由此可得电池欧姆电阻R=(V1-V0)/I。DP模型用两个阻容环节叠加的方式来模拟电池的极化过程。R1和C1组成的RC并联电路时间常数较小,用于模拟电池在电流突变时电压快速变化的过程V2-V1,R2和C2并联电路的时间常数较大,用于模拟电压缓慢变化的过程E-V2。
假设电池在t0-tr期间先放电一段时间,然后剩余时间处于静置状态,其中t0,td,tr分别为放电开始时刻、放电停止时刻和静置停止时间,在此过程中RC环路电压为
(4)
(5)
式中τ1=R1C1,τ2=R2C2为两个RC并联电路的时间常数,电池在放电期间,极化电容C1和C2处于充电状态,RC并联电路的电压呈指数上升,电池从放电状态进入静置后,电容C1和C2分别向各自的并联电阻放电,电压呈指数下降,模型中的电阻和电容的大小与电池当前SOC值和充放电电流值大小有关。E-V1阶段电压变化是由电池的极化效应消失引起的,在此过程中电池的电压关系为
(6)
可以简化写为
V=E-ae-ct-be-dt
(7)
其中
(8)
据此可辨识出R1,C1,R2,C2的值。电池工作状态不仅与SOC有关,还与充放电倍率和温度有关,本文在恒温条件下,基于不同的SOC和充放电倍率进行模型参数的辨识。
3 模型验证
模型精度及速度对于状态估计有着重要影响,为此对模型精度及速度进行验证。基于参数辨识结果,在MATLAB/SIMULINK分别搭建Thevenin模型和DP模型,如图6所示为Thevenin模型结构,DP模型和Thevenin模型相比,仅多了一个RC环路。
模型中,SOC由安时积分法获得,仿真环境中,安时积分不存在累积误差,可以作为理想SOC使用。为验证两模型误差和速度的比值关系,采用3组不同工况和2台计算机进行仿真验证,结果差异几乎不变,比值关系稳定,本文列出其中一种工况及对应的结果。
图5所示为模型输入工况、模型仿真结果及误差曲线,表1为具体的模型验证结果。

图5 模型输入工况、仿真结果及误差曲线

表1 模型验证结果
模型输入工况如图5(a),包含充放电过程和搁置过程,用于模拟动力电池充电、放电及搁置状态,总时长3 600 s,采样周期1 s。由图7(b),(c)及表1可知,两个模型均能较好跟踪工况电压的变化。两模型极限误差基本相同,Thevenin模型均方根误差即相比真实值的偏离程度是DP模型的1.05倍,而DP模型的运行时间是Thevenin模型的1.1倍左右。
4 模型评价方法
由模型验证结果可知,两个模型各有优势,Thevenin模型的精度整体小于DP模型,但其运行速度快。实际应用中,往往需要同时考虑精度和速度,使两者得到一个良好的平衡。本文基于仿真过程,分别设定模型精度和速度的权重系数A,B,定义模型选择因子ST,SD,由此建立可靠的评价方法
(9)
式中A,B为选择模型过程中主观设定的精度和速度的权重系数,和为1。1.05反映的是Thevenin模型整体误差为DP模型的1.05倍,1.1反映的是DP模型的运行时间是Thevenin模型的1.1倍。ST≥SD时,Thevenin模型为最优模型,ST
5 结 论
等效电路模型是建立动力电池状态估计方法的基础,目前较多文献在利用等效电路模型时都是直接引用,并未对最优等效电路模型深入研究。本文以此为出发点,基于模型精度和运行速度对应用最为广泛的Thevenin模型和DP模型进行比较研究,得出Thevenin模型相比于DP模型能够在精度和速度方面取得更好的平衡,只有当精度的权重因子大于2倍的速度的权重因子时,才适合采用DP等效电路模型。本文研究为开展动力电池状态估计和能量管理提供了重要的理论基础。
猜你喜欢
消费电子(2022年7期)2022-10-31
电工技术学报(2022年19期)2022-10-14
汽车实用技术(2022年16期)2022-09-03
无线互联科技(2021年21期)2022-01-10
新能源汽车供能技术(2021年1期)2021-10-14
汽车实用技术(2019年16期)2019-09-11
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
科技视界(2016年17期)2016-07-15
三联生活周刊(2016年22期)2016-05-27