考虑附着系数的商用车EPS控制策略
2022-01-12 09:31李耀华范吉康南友飞冯乾隆
重庆理工大学学报(自然科学) 2021年12期
李耀华,范吉康,何 杰,南友飞,冯乾隆
(长安大学 汽车学院,西安 710061)
电动助力转向系统(electric power steering,EPS)与传统的液压助力转向系统相比,结构简单,经济性更好,是车辆工程领域的研究热点之一[1]。近年来,EPS系统开始由乘用车领域向商用车领域拓展[2]。传统EPS的助力转矩只由车速与驾驶员手力矩决定,并没有考虑路面附着系数。而附着系数对转向阻力矩有较大的影响,特别是在低附着路面上,转向阻力矩会大幅降低。如果EPS系统仍然输出与高附着路面上相同的助力矩,就会造成驾驶员路感降低,甚至丧失路感,威胁行车安全[3-4]。因此,设计考虑附着系数的EPS助力特性曲线对提高车辆行驶安全性有着重要的意义。Masahiko 等[5-6]通过转向角反馈控制以及回正力矩反馈控制改善了车辆在低附着路面上的回正性能,但没有提升低附着系数路面上驾驶员的路感。赵林峰等[7-8]将附着系数分级,设计了基于路面附着系数的助力电流修正策略,提升了车辆在低附着路面的回正性能,但没有对提升低附着系数路面上驾驶员路感做深入研究。Fan等[9-10]基于乘用车设计了考虑附着系数的控制策略,通过模糊控制提升了低附着系数路面驾驶员路感。
本文分析了不同附着系数路面转向阻力矩变化情况,针对商用车EPS系统设计了基于阻力矩及基于电流补偿2种考虑附着系数的EPS控制策略,并建立了TruckSim/Simulink联合仿真模型,对这2种控制策略进行了仿真验证。仿真结果表明这2种控制策略均能在保证转向轻便性的同时,提高低附着路面上驾驶员的路感,提高低附着路面上的行驶安全性。
1 路面附着系数与转向盘力矩的关系
对于装备EPS系统的车辆,转向阻力矩满足以下关系:
Tr=Ta+Td
(1)
式中:Tr表示转向阻力矩;Ta表示助力系统助力矩;Td表示驾驶员转向盘手力矩。
转向系统阻力矩由路面施加到转向轮上的作用力、转向系统的惯性力及转向系统的摩擦力组成,其中路面与转向轮之间的作用力包括路面摩擦阻力矩、轮胎自回正力矩、侧向力回正力矩和重力回正力矩等[11]。路面附着系数直接影响路面摩擦阻力矩的大小。当路面附着系数减小,轮胎的自回正力矩线性区域及幅值均会大幅降低。因此,路面附着系数是影响转向系统阻力矩大小的重要因素。
基于Trucksim软件,本文搭建了某商用车多体动力学模型,整车模型参数如表1所示。
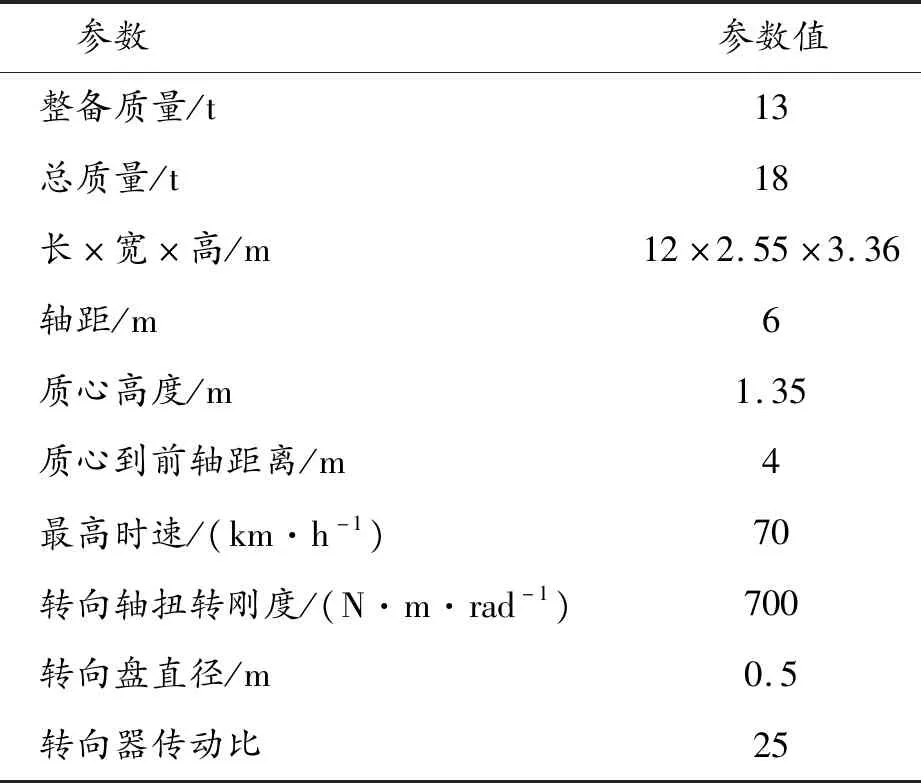
表1 某商用车整车模型参数
在无助力情况下,保持车速为50 km/h,匀速转动转向盘至某一角度后保持转向盘转角不变,使不同附着系数条件下侧向加速度都为0.15g,在不同路面附着系数下(μ=0.2、0.4、0.6、0.8),转向阻力矩如图1和表2所示。
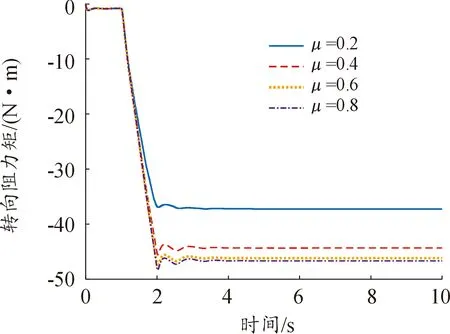
图1 不同路面附着系数下的转向阻力矩
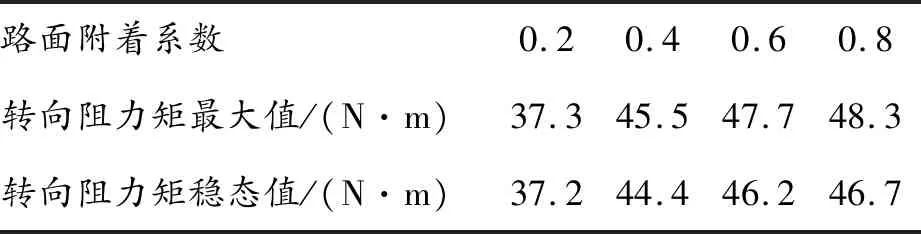
表2 不同路面附着系数下的转向阻力矩
由上述仿真结果可知,路面附着系数越小,转向阻力矩越小。为了确保转向轻便性,EPS系统一般采用高附着系数设计助力特性,但在低附着系数路面下,EPS系统就会产生过多的助力,从而影响驾驶员对路感的判断。因此,为了提高车辆在低附着路面上行驶时驾驶员的路感,EPS控制策略需要考虑附着系数。
2 基于转向阻力矩的EPS控制策略
2.1 不同附着系数下转向阻力矩
由经验公式可得汽车原地转向工况阻力矩,如式(2)所示[12]。
(2)
式中:Tmax为原地转向阻力矩;f为轮胎与路面的摩擦系数;G1为汽车的前轴载荷;P为轮胎气压。
在TruckSim环境内设置附着系数分别为0.2、0.4、0.6、0.8,在20、30、40、50、60、70 km/h恒定车速下进行特征车速角阶跃试验。附着系数为0.8和0.6时,匀速转动转向盘,直至侧向加速度稳定至0.3g,并固定转向盘转角,取此时转向盘转矩作为最大转向阻力矩。商用车相比于乘用车重心较高,侧滑、侧翻风险较高,因此采用比较保守的控制策略。对于附着系数为0.4的情况,使车辆侧向加速度稳定至0.2g;对于附着系数为0.2的情况,使车辆侧向加速度稳定至0.15g。附着系数为0.8时,不同特征车速下的转向盘转向阻力矩曲线图如图2所示。不同附着系数下和特征车速下,转向盘最大阻力矩试验结果如表3所示。

图2 μ=0.8时,不同特征车速下的转向盘转向阻力矩曲线

表3 不同附着系数和特征车速下转向盘最大阻力矩
2.2 助力电流特性曲线设计
本文采用直线型助力电流曲线,如图3所示,表达式如式(3)所示,其中I为助力电流;k为助力矩变化区直线斜率;Td为转向盘手力矩;Td0为助力电机开始助力时的手力矩阈值;K(v,μ)为助力系数;Imax为零车速、附着系数为0.8时的最大助力电流;Tdmax为最大手力矩。
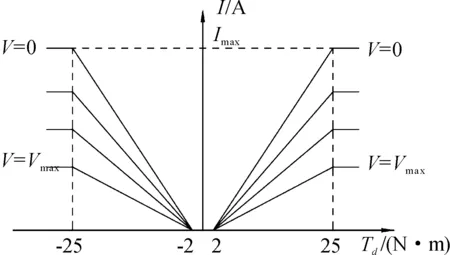
图3 直线型助力电流特性曲线
(3)
Imax的计算公式如式(4)所示,其中Trmax为转向盘最大阻力矩;ij为减速机构传动比;ηj为减速机构传动效率;Kt表示助力电机电磁转矩系数。
(4)
行业标准QC/T 480-1999规定:对于总质量大于15 t的商用车,驾驶员在转向盘上施加的最大切向力为220 N,平均切向力不能超过140 N[13]。本文选用的商用车转向盘直径是50 cm,平均转向盘转矩最大为35 N·m。为了减少助力电机过载的可能性,本文选定Tdmax=25 N·m。为了使转向不过于灵敏,本文选取Td0=2 N·m。
助力电机理想助力矩以及特征车速的车速系数可由式(5)(6)求得,其中Ta表示助力电机助力矩;Tw表示仿真试验获得的转向盘力矩;Ta0表示零车速且附着系数为0.8时的助力矩。
Ta=Tw-Tdmax
(5)
(6)
在设计助力曲线时,为了保证转向轻便性,取侧向加速度较大时的角阶跃试验值作为最大阻力矩。对比表2、3中车速为50 km/h的值,可知当侧向加速度较小时,因附着系数减小而使得转向阻力矩变小趋势变缓。在低附着系数路面上,车辆车速较低,大多运行在侧向加速度较小的工况。这样当车辆侧向加速度较小时,因附着系数减小造成的EPS助力矩减小值大于转向阻力矩减小值,从而使得手力矩变大,在保证转向轻便性的基础上提高了路感和行驶安全性。
由表3可得不同附着系数和特征车速下的助力系数,如表4所示。

表4 不同附着系数和特征车速下的助力系数
对表4的助力系数进行拟合,则可得到考虑附着系数的商用车EPS系统助力系数曲线,如图4和式(7)所示。
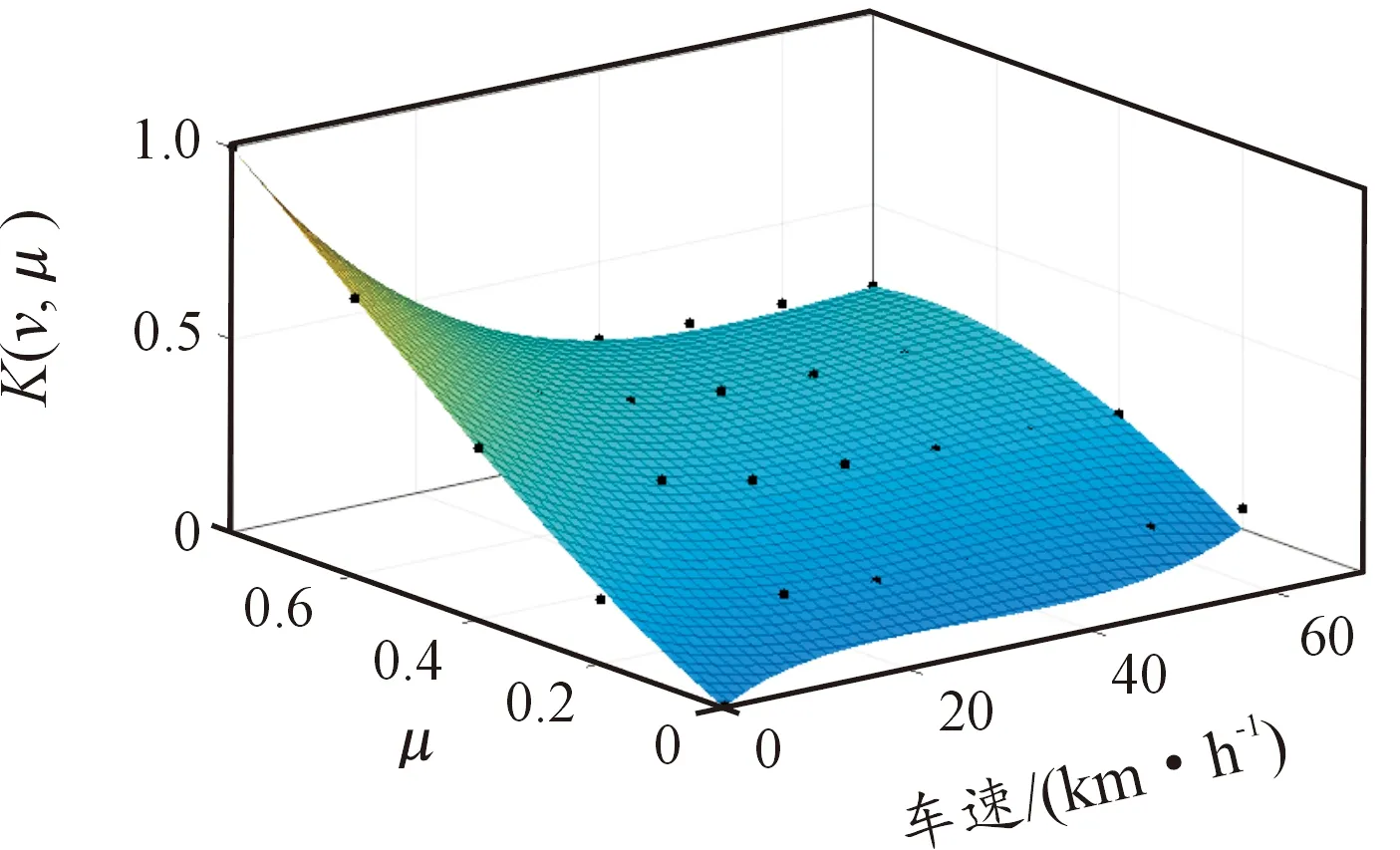
图4 考虑附着系数的商用车EPS系统助力系数
K(v,μ)=-0.006 209v+0.784 3μ+
0.000 226 6v2-0.020 85vμ+1.059μ2-
0.000 002 636v3+0.000 384 9v2μ-
0.018 42vμ2-0.596 9μ3
(7)
2.3 EPS控制策略
基于考虑附着系数的转向阻力矩的EPS控制策略如图5所示。
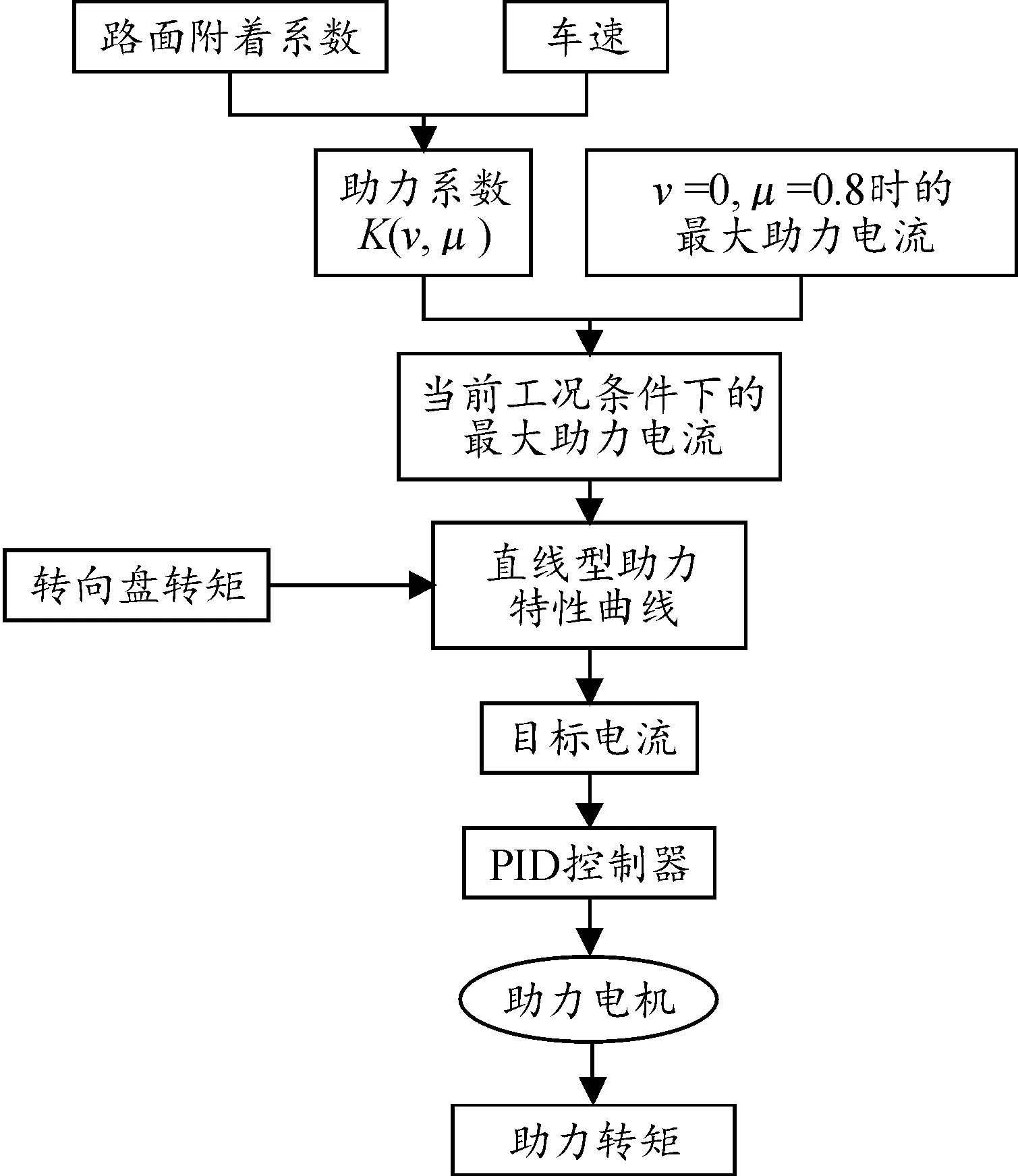
图5 考虑附着系数的转向阻力矩的EPS控制策略流程框图
EPS控制流程为:
1)根据路面附着系数估计值和实时车速,ECU计算出当前工况的助力系数K(v,μ)。
2)将当前工况的助力系数K(v,μ)与μ=0.8时的原地转向助力电流相乘即可获得当前工况下的最大助力电流。
3)结合助力电机开始工作时手力矩(2 N·m)及最大手力矩(25 N·m),即得到直线型助力特性曲线。
4)将当前的转向盘手力矩代入当前工况对应的助力曲线,即得目标助力电流,并由PID控制器控制助力电机发出助力转矩,完成助力转向。
2.4 仿真试验评价分析
基于Simulink与上文设计的EPS控制策略,本文搭建Trucksim和Simulink联合仿真模型。基于表3中附着系数为0.8时特征车速下的试验结果,拟合出不同车速下的助力系数K(v),设计了未考虑附着系数的EPS控制策略,其助力特性曲线如图6所示。
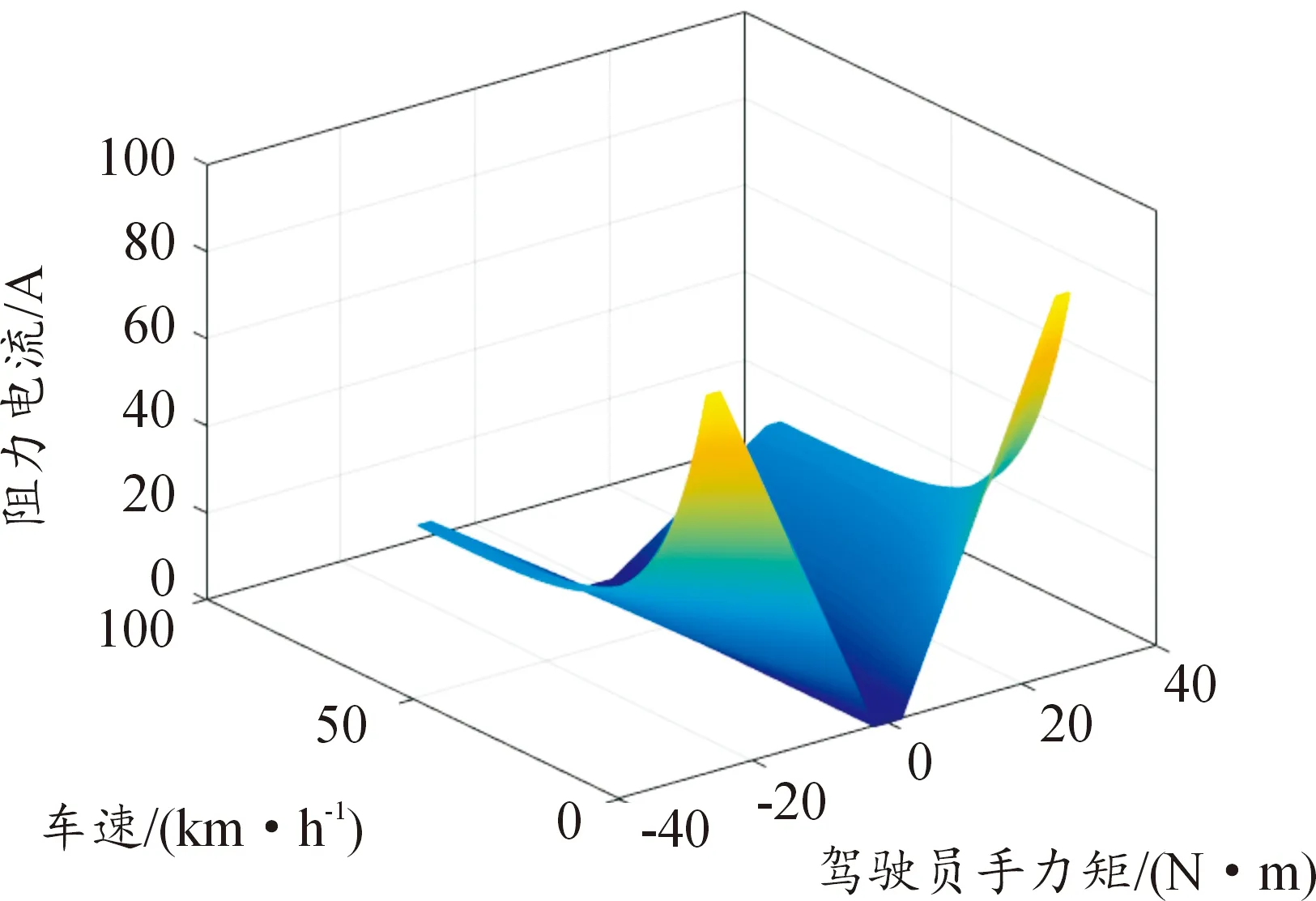
图6 未考虑附着系数的EPS控制策略助力特性曲线
由上文可知,未考虑附着系数的传统EPS控制策略中不同车速下的最大助力电流为Imax与助力系数K(v)的乘积,考虑附着系数的新型EPS控制策略中不同工况下的最大助力电流为Imax与助力系数K(v,μ)的乘积。
2.4.1转向轻便性评价
为了评价考虑附着系数的新型EPS系统的转向轻便性,本文基于GB/T 6323—2014中的相关要求,设计了双纽线试验[14]。设定车速为10 km/h,对商用车分别在附着系数为0.2、0.4、0.6和0.8的工况下进行了双纽线试验,试验结果如图7所示,图中将基于转向阻力矩的EPS控制策略记为新型EPS。
在附着系数良好的路面上,本文设计的新型EPS与传统EPS转向助力特性相近。由图7可知,附着系数为0.8时,新型EPS的最大转向盘力矩为7.7 N,具有良好的转向轻便性。当车辆行驶在附着系数较低的路面上时,应用新型EPS后的驾驶员手力矩有所上升,从而减少车辆在低附着路面上行驶时驾驶员误操作转向盘的可能性,提升行驶安全性,在对驾驶员负担影响较小的前提下,提高了低附着路面的行驶安全性。
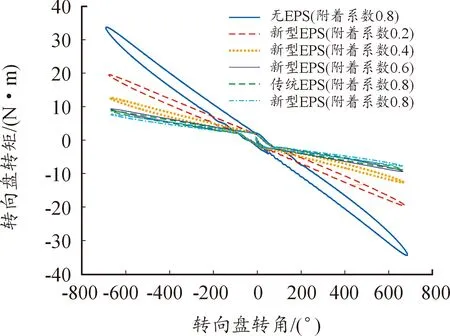
图7 转向盘转角和转矩的关系
根据QC/T 480—1999标准中的有关要求,依据最大转向力评分标准对EPS系统的转向轻便性进行打分,评价公式如式(8)所示,式中NFm为转向盘最大操舵力的评价计分值;Fm60为转向盘最大操舵力的下限值,Fm100为转向盘最大操舵力的上限值,Fm为最大操舵力的试验值。
(8)
由图7可知,新型EPS系统的转向盘最大转向力在附着系数为0.2时取到,转向盘最大转矩为19.3 N·m,转向盘最大切向力为77.2 N,计算可得NFm为111.9分,标准中规定评价计分大于100分,按100分计。因此,本文设计的新型EPS系统在全工况下具有良好的转向轻便性。
2.4.2中心转向区路感分析
为了分析路感,本文按照GB/T 6323—2014中相关标准设计了中心转向区路感评价试验。试验车速为60 km/h,转向盘输入0.2 Hz的正弦信号;为了避免低附着系数路面上车辆侧滑失稳,使不同工况下的侧向加速度峰值都在0.15g附近。试验结果如图8所示。
选择转向盘转矩梯度作为评价指标,其中侧向加速度为0g时的转向盘转矩梯度表征直线行驶时的路感,侧向加速度为 ± 0.1g时的转向盘转矩梯度表征刚离开直线行驶时的路感[15-17]。由图8可求得不同侧向加速度下的转向盘力矩梯度,结果如表5所示。
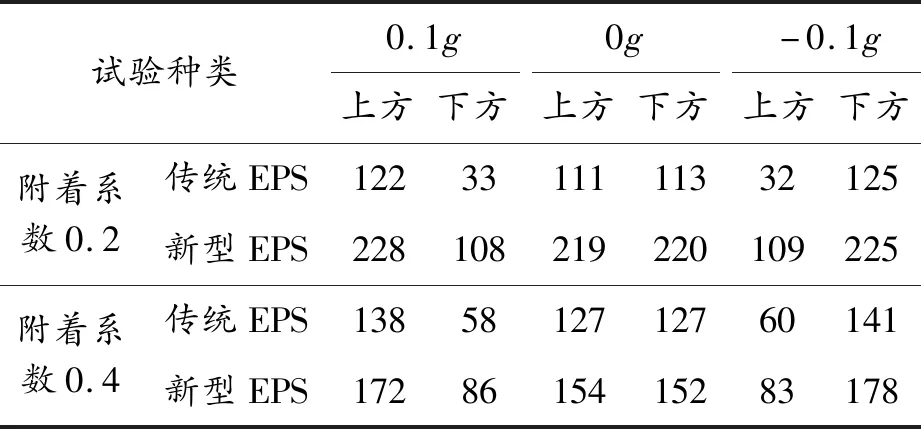
表5 不同侧向加速度下的转向盘力矩梯度 [N·m·(9.8 m·s-2)-1]
由表5可知,在不同的侧向加速度条件下,采用新型EPS的转向盘力矩梯度均大于采用传统EPS的转向盘力矩梯度,表明新型EPS系统有效提高了车辆的中心转向区路感,且附着系数越低,采用新型EPS的转向盘力矩梯度越高,提示驾驶员当前路面附着情况的效果越好。
3 基于电流补偿的EPS控制策略
3.1 基于模糊控制的电流补偿
在未考虑附着系数的传统EPS控制策略基础上,对助力电流进行补偿。补偿电流及施加补偿电流后的目标电流分别如式(9)(10)所示,其中Ic表示补偿电流;K表示补偿电流系数;θw表示转向盘转角;Iμ表示考虑附着系数后的目标电流;It表示未考虑附着系数目标电流。
Ic=K·θw
(9)
Iμ=It-Ic
(10)
由上文分析可知,为了增强路感,补偿电流应当随着附着系数的降低而增大。同时,车速与转向盘手力矩的关系为正相关,补偿电流应随着车速的增加而增加。因此,补偿电流系数的取值与附着系数和车速均有关。
本文采用模糊控制确定补偿电流系数,模糊控制器输入为附着系数和车速,输出为补偿电流系数。基于模糊控制的电流补偿EPS控制策略如图9所示。模糊控制系统基于附着系数及车速输出补偿电流系数,由转向盘转角得出补偿电流,将其与未考虑附着系数的助力电流相减即可得到目标助力电流。

图9 模糊控制的电流补偿EPS控制策略框图
定义附着系数论域为A{1,2,3,4,5,6,7,8},量化因子Kμ=10。将附着系数的论域A划分为5个模糊子集{S,MS,M,MB,B},隶属度函数如图10所示。
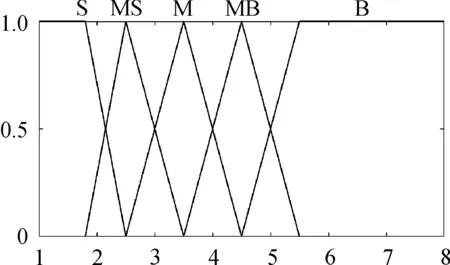
图10 附着系数的隶属度函数
由于本文选用的商用车最高车速为70 km/h,将车速论域定义为B{0,1,2,3,4,5,6,7},量化因子Kv=0.1。将车速论域B划分为6个模糊子集{ZO,S,MS,M,MB,B},隶属度函数如图11所示。

图11 车速的隶属度函数
电流补偿系数论域定义为C{0,1,2,3,4,5,6,7,8,9,10},比例因子KK=0.025。将补偿电流系数论域C划分为8个模糊子集{ZO,S,MS,M,MB,B,VB,GB},隶属度函数如图12所示。

图12 补偿电流系数的隶属度函数
模糊控制规则如表6所示,输入-输出变量三维关系如图13所示。模糊控制规则选择Mamdani型。
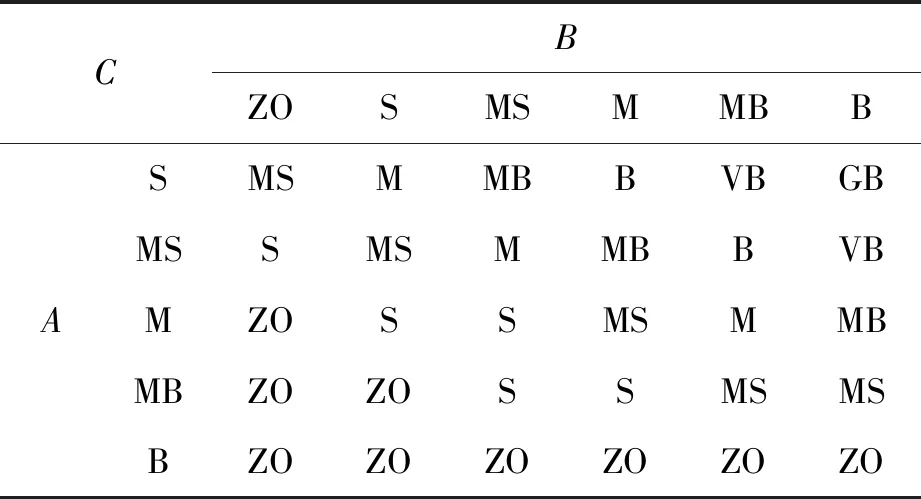
表6 模糊控制规则
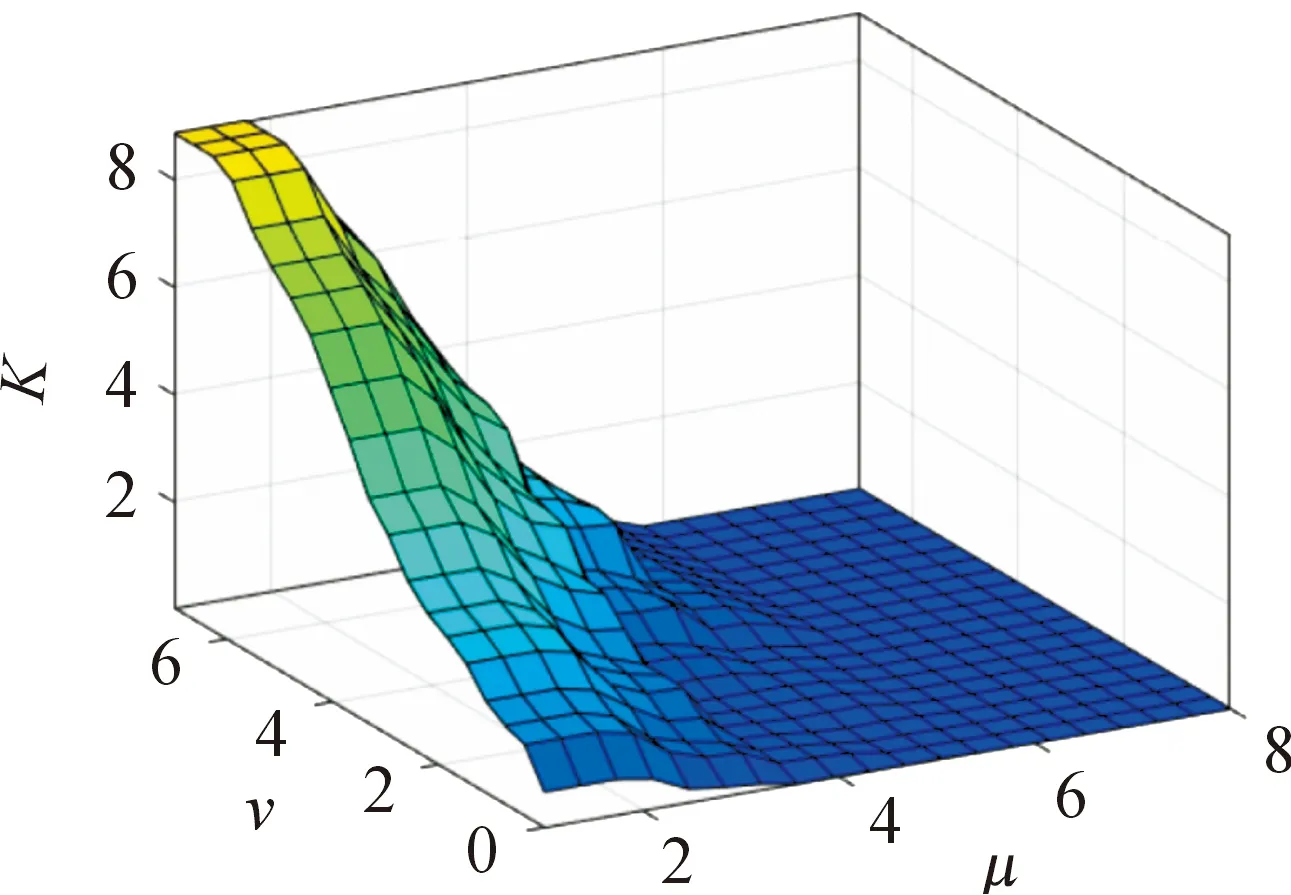
图13 模糊控制输入输出三维关系
3.2 仿真试验评价
3.2.1转向轻便性评价
对基于模糊控制的电流补偿EPS控制系统进行双纽线试验,试验结果如图14所示,图中将基于电流补偿的EPS控制策略记为模糊EPS。
根据上文中的评价打分标准进行了转向轻便性评价。由图14可知,转向盘最大转矩为17.2 N·m,故转向盘最大切向力为68.8 N,计算可得NFm为115.0分。基于模糊控制的电流补偿EPS控制系统评价计分也为100分,具有良好的转向轻便性。
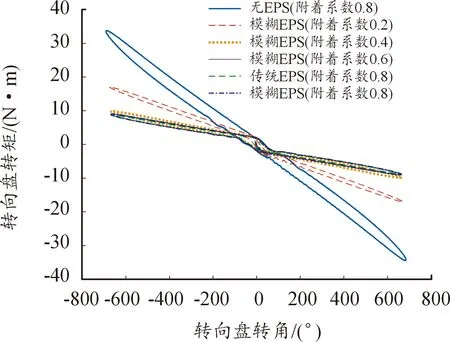
图14 转向盘转角和转矩的关系
对比2种考虑附着系数的EPS控制策略,基于电流补偿的EPS控制策略比基于转向阻力矩的EPS控制策略具有更好的转向轻便性,但2种考虑附着系数的EPS控制策路的转向轻便性评分都为100分,2种EPS控制策略都具有良好的转向轻便性。
3.2.2中心转向区路感分析
对基于模糊控制的电流补偿EPS控制系统进行中心转向区路感评价试验,试验结果如图15所示。不同侧向加速度条件下的转向盘力矩梯度如表7所示。
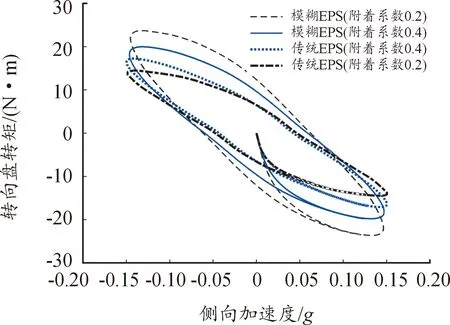
图15 侧向加速度与转向盘转矩关系曲线
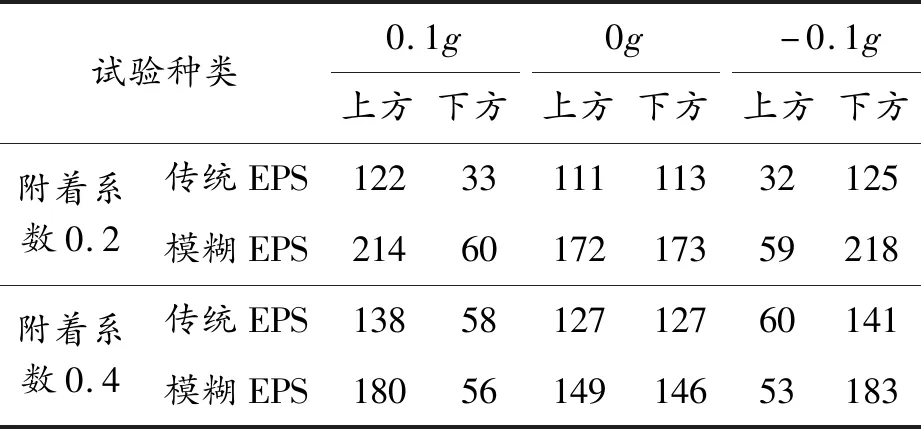
表7 不同侧向加速度条件下的转向盘力矩梯度 [N·m·(9.8 m·s-2)-1]
由表7可知,基于模糊控制的电流补偿EPS控制系统在大部分工况下能提高转向盘力矩梯度,但受转向盘转矩迟滞增大的影响,在附着系数0.4时车辆离开直线行驶状态时,采用模糊EPS使转向盘转矩梯度有所下降。
对比2种考虑附着系数的EPS控制策略,基于转向阻力矩的EPS控制策略比基于电流补偿的EPS控制策略能更好地提示驾驶员当前道路情况,可以使驾驶员具有更好的路感。
4 结论
1)路面附着系数的变化影响转向阻力矩变化。路面附着系数越小,转向阻力矩越小。为了确保转向轻便性,EPS系统助力策略一般基于高附着系数路面设计,导致在低附着系数路面下EPS系统产生过多助力,造成驾驶员路感下降,甚至丧失。为了提高车辆在低附着路面上行驶时驾驶员的路感,需要设计考虑附着系数影响的EPS控制策略。
2)基于不同附着系数路面上的阻力矩变化情况,设计了考虑附着系数的EPS系统助力系数曲线,从而建立考虑附着系数变化的EPS控制策略。
3)设计了基于模糊控制的电流补偿EPS控制策略,根据车速和附着系数由模糊控制器生成补偿电流系数,对附着系数变化的影响产生补偿。
4)转向轻便性和中心转向区路感评价的仿真试验结果表明:本文提出的2种EPS控制策略均具有良好的转向轻便性,可在不同附着系数的路面上保证驾驶员具有良好的路感。在转向轻便性评分均为满分的前提下,基于电流补偿的EPS控制策略比基于转向阻力矩的EPS控制策略具有更好的转向轻便性。基于转向阻力矩的EPS控制策略比基于电流补偿的EPS控制策略能使驾驶员获得更好的路感。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年3期)2016-11-07
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19