
矿山有轨运输电瓶人车管控系统研究
2022-01-10 03:54张维国姚宗旭葛启发
有色设备 2021年3期
张维国,吴 桐,姚宗旭,葛启发
(1.中国恩菲工程技术有限公司,北京 100038;2.北京科技大学 土木与资源工程学院,北京 100083)
0 概述
随着信息技术的发展,矿山数字化转型需要信息技术(IT)和通信技术(CT)相融合实现信息通信技术(ICT)的全面应用。矿用电机车是井下运输矿石、物料的主要运输工具,在矿岩运输中扮演着十分重要的角色。实现矿井电机车的无人化,一方面可以提高矿石运输的效率,节约成本;另一方面,可以避免危险事故发生时对机车操作人员造成不必要的伤亡[1]。矿山有轨运输无人驾驶系统的自动化控制技术(OT)集成了信息通信技术,将矿山生产管理系统和控制系统紧密的结合起来,实现井下电机车自动控制和无人驾驶,有效提高电机车运行效率,降低矿石运输成本,缓解井下安全生产压力[2]。在已实施有轨运输无人驾驶系统的矿山,当有轨运输电瓶车、材料车和人车等辅助车辆进入后,如何确保辅助车辆有效避让无人驾驶电机车和保障人员安全,成为矿山安全高效生产的主要内容。2011年高峰针对井下辅助运输系统的设计和智能调度进行了研究,设计了一种适用于煤矿井下无轨胶轮车系统的巷道运输线路分析方法,实现了无轨胶轮车运输系统的自动控制,减少巷道内无轨胶轮车的堵车问题[3]。随着有轨运输无人驾驶技术的成熟和全面推广应用[4-5],针对有轨运输无人驾驶系统与有轨辅助车辆,特别是有轨运输电瓶人车的管控,成为建设智能化安全矿山必须优先考虑的问题。
1 有轨运输无人驾驶与电瓶人车运输
我国金属矿山有近两万座,随着金属非金属地下矿山资源开采难度加大,仅有少数矿山的现代化程度较高,深部开采将成为矿山的主要发展趋势。有轨运输系统是地下矿山开采首选的生产运输工艺系统。矿用电机车是矿山开采过程中矿石和岩石运输的有轨运输设备,其具有运力大、成本低、设备相对简单、可靠性强的特点,在大型地下矿山中被广泛采用。实现地下矿山有轨运输中段无人驾驶成为深部资源开发过程中的智能化和无人化技术发展趋势。
当前国内有轨运输无人驾驶系统在多个矿山得到了成功应用。2013年冬瓜山铜矿-875 m运输中段无人驾驶电机车试验成功,验证了该技术方案实用可行,取得了良好的效果[6]。刘海和葛启发等人针对高海拔矿井长距离无人驾驶电机车提出了基于基础运输无人驾驶系统的优化方案,并实现了双机牵引的有轨运输无人驾驶系统的应用[7]。王锦胜针对行洛坑钨矿采用的溜井装矿、平硐开拓有轨运输和底侧式卸矿方式,结合生产工艺流程及管理的特点,构建了有轨电机车无人驾驶系统,实现了地面远程遥控装矿、有轨电机车无人驾驶自动运行及全自动卸矿等功能[8]。紫金山金铜矿、酒钢西沟矿和镜铁山2 520 m电机车无人驾驶技术也得到了应用[9-11]。陈志刚提出了煤矿有轨电机车无人驾驶技术的解决方案[12]。
矿山有轨运输无人驾驶项目建设的出发点即为“无人则安”,当有轨运输无人驾驶系统投入运行后,需要考虑现场其他生产工序开展工作时的人员进出和材料运输问题,特别是有轨运输电瓶人车、材料车和其他有人驾驶的辅助车辆与无人驾驶系统存在同时运行或者交替运输的情况。虽然,王京华和王李管等人提出基于计算机视觉技术的矿井电机车无人驾驶障碍物检测[13],以及吕秀娟提出的井下电机车无人驾驶的移动闭塞技术进行防碰撞检测和信号系统管理[14],矿山实际生产管理中需要充分考虑有人驾驶电瓶人车的安全,实现电瓶人车与无人驾驶电机车的信息交互和智能放行管理,降低乘坐电瓶人车工作人员的安全风险,降低电瓶人车的占道时间,提高无人驾驶电机车系统的运行效率,从安全生产和经济效益方面都有迫切需求和实施的必要性。
2 有轨运输电瓶人车管控系统构成
2.1 电瓶人车管控需要与系统构成
以某铜矿为例,其有轨运输无人驾驶系统已经成功投入运行,为了方便采场相关作业人员出入和部分材料运输采购了两台电瓶驱动的电机车。有轨运输无人驾驶系统在运行过程中和电瓶人车存在运行风险。有轨运输电瓶人车管控系统从项目现场运行和安全管理的需要出发,通过系统之间的数据联动实现电瓶人车与无人驾驶电机车的智能管控。有轨运输电瓶人车管控系统由车载终端系统、通信系统、定位系统、巷道定位基站、调度中心控制系统等部分组成。
现场应用表明矿山有轨运输电瓶人车管控系统技术成熟、维护管理简单、运行可靠,可有效降低电瓶人车驾驶人员和乘车人员的安全风险。同时,降低电瓶人车的占道时间,提高无人驾驶电机车系统的运行效率。
2.2 车载移动终端与通讯定位系统
考虑到软硬件成本和可行性,有轨运输电瓶人车管控系统没有用工业控制平台开发而采用了车载移动终端实现定位和可视化智能调度管理,其中,在电瓶人车上安装了车载移动终端系统,其采用集成触控屏的工业计算机一体机作为,即工业集成电脑整机。车载移动终端系统分为硬件系统和软件平台两部分作为车载平台的构成,管控系统车载移动终端如图1所示。因矿山现场条件比较严苛、工况有限制和运行要求,车载终端选用嵌入式设备制造工艺,抗干扰、抗严寒、抗震动、防眩光、防尘防雨能力强,结合高可靠的WIFI双天线CPE通信和4G公网通信模块保障数据可靠传输,并且将GPS和UWB定位模块进行融合,实现地表露天工业场地和平硐内的连续高精度定位。为了实现可靠的管控,根据现场需求集成工业级触控屏幕、语音模块、显示模块、多接口扩展模块等,以实现移动设备位置及工作信息的上下传输。

图1 管控系统车载移动终端
2.3 巷道定位基站与设备安装
有轨运输电瓶人车管控系统需要在电瓶人车运行的全线路上进行实时定位和通信,为了严格管控有轨运输电瓶人车在地表停车场的出入,在露天采用了GPS定位,进入平硐之后将UWB定位基站与某铜矿有轨运输无人驾驶系统的通信基站集成。某铜矿有轨运输无人驾驶系统已经在地表工业场地和平硐内布置全覆盖的高速WIFI通信系统,通信基站布置已经充分考虑了通信条件和弯道限制等。平硐内定位基站与某铜矿有轨运输无人驾驶系统通信基站集成后,在平硐内的UWB定位基站基本能够全覆盖整个巷道。UWB定位基站电源从基站引出220V交流电,通过在通信基站内安装电源转换器之后,直接给UWB定位基站和天线供电。有轨运输无人驾驶通信基站配备有一块可供基站工作2小时的电池,因此在接入UWB定位基站电源后,不会对原有的通信系统造成较大影响。在设备安装方面,UWB定位天线可附加到通信天线安装支架上,因UWB定位采用超高频微波通信,对某铜矿有轨运输无人驾驶系统通信也会造成干扰。
2.4 核心管控软件与数据中心开发
有轨运输电瓶人车管控系统其核心功能是通过车载移动终端软件开发、服务器数据中心开发、无人驾驶系统数据接口开发、管控客户端、报警提醒与数据分析模块等。
(1)数据中心功能:数据双向高可靠通信、数据解算与状态识别、数据存储和管理、数据分析与发布、内外部工业控制数据与管理数据接口模块等功能。
(2)车载终端软件:通信切换与信号强度管理、语音报警与提醒功能、定位数据通信功能、最佳定位数据获取功能、车辆位置和状态数据发布、管理数据接收功能、数据分析与统计功能、运行地图与其他电机车位置显示功能、电瓶车工作任务管理功能、数据分析功能和异常状态紧急管理功能。
(3)核心管控软件:数据接收与分析、无人驾驶电机车与电瓶人车状态位置现实功能、电瓶人车任务与运行预警、电瓶人车放行管理和任务确认、报警与异常处理、数据分析与管理、工业控制系统与信息管理系统通信,数据接口开发和数据交互等功能。
其他功能包括GPS定位U-blox芯片模块数据解算、UWB基站及接受模块数据格式分析与采集开发、可靠性数据通信与定位数据获取、工艺联动与任务管控模块、数据分析和数据融合管控功能等。
3 电瓶人车管控系统测试
3.1 巷道UWB定位测试
有轨运输电瓶人车定位系统的定位方式包括GPS和UWB两种,在地表露天工业场地采用可靠的GPS定位,实现电瓶人车的防碰撞和放行管理,在平硐内采用UWB定位基站进行定位,实现巷道内电瓶人车的低成本连续定位。
本次定位测试时,在平硐的750 m、900 m处各安装一个UWB定位基站,其中电瓶人车上的定位基站与巷道内安装的一致,便于以后更换和升级。在现场测试过程中可以实时通过电瓶人车的移动终端查看定位信息,当电瓶人车在两个UWB定位基站中间往复运行时,可实时监测定位的效果,包括定位精度、最佳距离、最大距离、定位位置等,将测出的定位位置与巷道标注位置、基站设置位置进行对比,进而测试出定位的精度,测试效果基本达到最初的设计要求。

图2 750 m处UWB基站

图3 900 m处UWB基站

图4 定位终端标签连接
巷道UWB定位测情况,可以初步得到电瓶人车距离定位基站在60 m以内,位置变化较为均匀,能够满足较高精度定位需要,在65~95 m定位位置跳变较多,但电瓶人车定位位置仍然可以连续确定,总体来看定位精度可以满足使用需求。
从现场UWB定位基站的安装位置可以看出,定位基站安装在巷道壁附近的基站箱上,考虑的本次测试现场的情况,没有布置到天线支架上,如果需要更高的定位精度,可以优化UWB定位基站安装或者增加基站的功率。
3.2 中控和电瓶人车调度测试
(1)电瓶人车放行管理
在电瓶人车启动之前,电瓶人车司机需要通过车载移动终端向中控发送运行请求,中控上位机收到请求信息后,根据巷道运输情况决定是否允许电瓶人车运行,同时确定轻车道运行还是重车道运行。

图5 车载定位终端请求

图6 中控调度回复
(2)电瓶人车位置显示
电瓶人车位置显示是将电瓶人车的定位位置换算成与电机车相同的坐标系,在中控室无人驾驶监控上位机画面中集成显示,方便无人驾驶操作员直观的了解电瓶人车的动向。
(3)电瓶人车调度功能

图7 有轨运输电瓶人车位置显示
传统的中控操作人员与电瓶人车的通讯和调度通常靠单一的对讲系统进行沟通,通讯方式单一,电瓶人车驾驶员存在疏忽和漏报的情况。本次测试调度功能主要针对中控操作人员与电瓶人车之间建立的数据链路实现电瓶人车的放行和调度管控。电瓶人车司机可以通过车载移动终端向中控室操作人员发送快捷请求调度信息,中控室操作人员也可以在有轨运输无人驾驶系统上位监控界面上向电瓶人车司机发送调度指令。有轨运输电瓶人车管控系统调度信息可以定制并智能排序,实现快速对话。

图8 有轨运输电瓶人车快速对话框
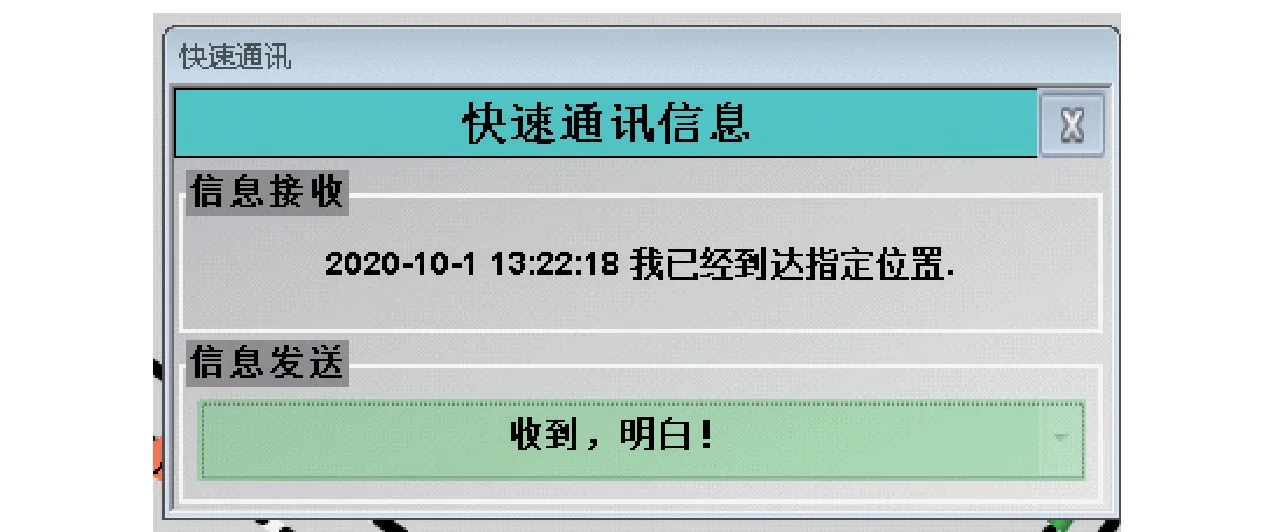
图9 中控快速对话框
(4)电机车在电瓶人车移动终端显示
某铜矿四个编组的无人驾驶电机车需要实时准确的显示在电瓶人车车载移动终端上,方便电瓶人车司机直观准确掌握与无人驾驶电机车的相对位置,从而保障自身和无人驾驶电机车的安全,提高应急处置效率和降低安全风险。有轨运输电瓶人车管控系统可以将无人驾驶电机车的位置可以传送到车载移动终端,系统实时计算电瓶人车与最近的无人驾驶电机车之间的位置和状态,实现精确的防碰撞显示和监测。

图10 电机车在电瓶人车移动终端上的显示
3.3 电瓶人车和电机车防碰撞测试
电瓶人车和无人驾驶电机车防碰撞功能是有轨运输电瓶人车管控系统的主要功能之一,对于保障安全生产有着至关重要的意义。
防碰撞功能可以实现当电瓶人车和无人驾驶电机车相对位置小于170 m时,在中控有轨运输无人驾驶系统的上位机和电瓶人车车载移动终端上显示醒目的报警信息,并给出相应的操作提示。
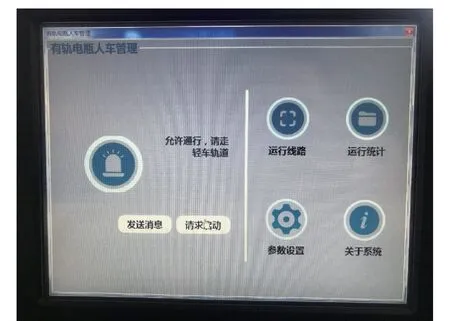
图11 有轨运输电瓶人车防碰撞报警显示
4 结论
矿山有轨运输的安全管控事关矿山安全生产和人员安全,在实施了有轨运输无人驾驶系统的矿山,在有轨运输电瓶人车上加装工业控制车载移动终端,依托高精度定位系统和无线网络,通过有轨运输电瓶人车管控系统可以实现中控有轨运输无人驾驶控制中心对所有有轨运输电瓶人车进行放行和安全控制。

图12 中控防碰撞报警画面
某铜矿有轨运输电瓶人车管控系统的开发和测试实现了电瓶人车的管控,通过现场测试表明,该系统可以实现高精度的连续定位和有效管控设备运行,能够提高安全生产和无人驾驶运行效率。
测试还检验了电瓶人车放行请求、电瓶人车位置显示、无人驾驶电机车位置显示、中控上位机与电瓶人车司机的调度和快速对话、电瓶人车和无人驾驶电机车防碰撞等多项实用功能,检验结果表明电瓶人车放行请求、电瓶人车位置显示、中控上位机与电瓶人车的调度功能稳定可靠。
在测试过程中发现目前需要改进的问题包括在人车高速行驶时,UWB定位位置存在一定的波动,在电瓶人车与定位基站距离大于50 m以上时,定位波动较大,需要增加滤波优化算法,保证定位连续稳定。
猜你喜欢
矿山机械(2022年9期)2022-09-20
派出所工作(2021年3期)2021-04-25
海峡姐妹(2020年8期)2020-08-25
模具制造(2019年10期)2020-01-06
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
电源技术(2015年7期)2015-08-22
新疆钢铁(2015年1期)2015-02-10
自动化博览(2014年6期)2014-02-28
中国科技信息(2012年13期)2012-11-07
