基于模糊PI的电动汽车无刷直流电机控制系统研究
2022-01-10 01:34胡雪凯杨少波
河北电力技术 2021年6期
闫 鹏,周 文,胡雪凯,杨少波,闫 磊
(国网河北省电力有限公司电力科学研究院,河北 石家庄 050021)
0 引言
随着人们对资源和环境的日益关注,汽车工业正朝着低碳低排放的方向发展。纯电动汽车具有零排放、无污染、低噪声的优点,具备巨大的发展潜力,越来越多的国家致力于研制纯电动汽车。电机驱动控制系统是纯电动汽车车辆行使中的主要执行结构,驱动电机及其控制系统是纯电动汽车的核心部件之一[1]。无刷直流电机(Brushless DC motor,BLDCM)中换相方式的改变,消除了长久以来因传统直流电机在换向过程中存在的火花、噪声干扰等问题,同时具有调速范围宽、动态响应快等一系列优点,目前被当做纯电动汽车电机的最优选择[2]。
一般传统的电机多用PID 控制策略,PID 控制优势在于控制原理与对象的数学模型毫无关系,仅用两者之间的实际误差来产生出消除此误差的控制策略。由于对系统精度、静态和动态性能要求日益提高,采用PID 策略的无刷直流电机已经不能达到所要满足的要求。因此,本文设计了一种采用模糊PI控制的无刷直流电机系统,不仅可使系统更快达到平稳转速,使系统抗负载扰动能力增强,同时维持了整体的动静态水平,大大提升了系统性能。
1 无刷直流电机数学模型
本文设计的无刷直流电机控制系统工作于两相导通星形三相六状态,如图1所示。
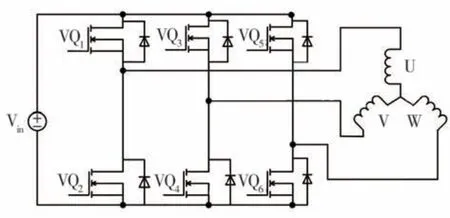
图1 运行电路
上述状态含义为每一时刻电机都只有两相导通。定子合成磁场的每个步进角的电角度是60°。转子每旋转60°时,定子磁状态就随换流变化而改变[3]。各功率管的导通顺序为 VQ1VQ6、VQ6VQ3、VQ3VQ2、VQ2VQ5、VQ5VQ4……当功率管VQ1VQ6导通,电流从VQ1流出,经过绕组A,最后由绕组C流入,经VQ6流回Vin。
无刷直流电机定子电压方程[4-8]:

式中:uU、uV、uW分别为U、V、W 三相定子相绕组电压;iU、iV、iW分别为U、V、W 三相定子相绕组电流;eU、eV、eW分别为U、V、W 三相定子相绕组电动势;Ls为定子每相绕组的自感;Rs为定子每相电阻;Lm为定子任意两相绕组间的互感;P为微分算子。
由于定子三相绕组的自感系数及互感系数都是固定值,因此有如下关系:

于是,电压方程可以写成:

若三相绕组的连接方式是不存在中线的星形连结,由此可得:


式中:Te为电磁转矩;TL为负载转矩;B为阻尼系数;J为转子的转动惯量;ωr为电机机械角速度。
依据上述所列出方程,搭建出无刷直流电机的等效电路,如图2所示。

图2 无刷直流电机等效电路
2 模糊控制策略
模糊控制是以模糊集合理论为基础,在模糊推理和语言规则基础上,用微机去模拟人对系统进行控制的一种控制理论[7]。模糊控制通过对被控对象建立模糊模型,将专家的知识、经验或操作人员在实际操作中得到的相关数据总结为相应的模糊规则,再通过运用模糊推理和模糊化处理的方法,最终得到所需的控制量,是一种智能控制的方法[8- 10]。
美国Calif or nia大学Zadeh博士于1965年发表著名的关于模糊的文章“Fuzzy Sets”,为模糊控制建立了基础;1973 年,模糊语言处理方式的提出,给模糊控制器问世提供了理论保障;1974年,国外著名教授E.H.Ma mdani把模糊控制应用于工业领域,使其在生产中发挥重要作用[11]。
2.1 模糊控制的基本原理
图3是模糊控制基本原理,其核心部分是模糊控制器,模糊控制过程如下:设误差信号为E,把信号E输送进模糊控制器中,对E做精确处理后,其结果再由模糊量化加工后变成模糊量,误差E的模糊量能够用模糊语言表示,由此最终获得模糊语言集合的子集e,再经过e和模糊控制规则R,二者依据推理来构造规则用来完成模糊决策,最终得到模糊控制量u。

图3 模糊控制原理框图
Ma mdani是模糊推理决策使用最普遍的算法,此算法于1974 年被提出,是基于“最大和最小”关系的推理算法。在Ma mdani算法中,用e和R的直积表示e→R的关系,表达式如下[8]:

要完成对被控对象的精确控制,还要将模糊控制量u做进一步精确处理,处理完毕后获得精确值,再经过数模转换把数字量变为精确的模拟量输送到执行机构。
2.2 模糊PI控制器规则表
如图4所示为动态响应曲线,将其划分为五阶段,分 别 是A0A1、A1A2、A2A3、A3A4、A4A5。比例系数Kp可使系统响应速度变快,Ki可使稳态误差变为零。取r0为给定值,y0为被控对象的输出值,表1列出系统响应在5个阶段下Kp、Ki的选择要求。

图4 动态响应曲线

表1 K p、K i 在不同阶段下的选择
其中,e定义成转速偏差量,ec定义成偏差变化量,二者为输入变量。ΔKp、ΔKi为PI系统的变化量,二者为输出变量。根据表1中所列出的比例系数Kp、Ki在不同阶段选择的要求,制定出模糊规则如表2和表3所示,其中模糊词集的英 文 字 头 缩 写 为{NB、NM、NS、Z、PS、PM、PB},中文定义为{负大、负中、负小、零、正小、正中、正大}。
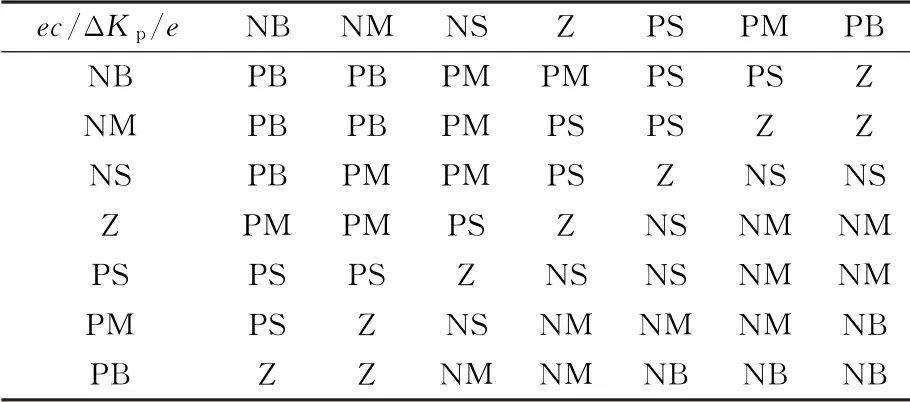
表2 ΔK p 的模糊规则表
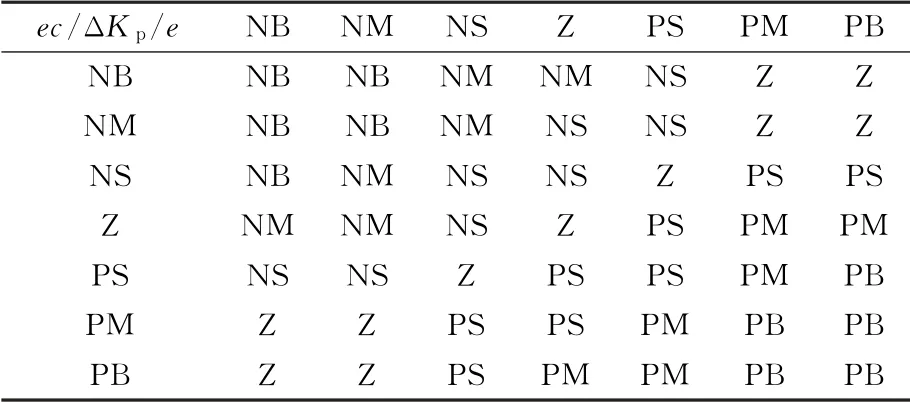
表3 ΔK i 的模糊规则表
3 无刷直流电机控制系统仿真
本文以MATLAB R2014a 版本中的Si mulink库为基础,利用Si mpower System Toolbox,基于此库的模块来搭建无刷直流电机的双闭环仿真系统。
3.1 无刷直流电机仿真系统
在MATLAB的Si mulink平台上搭建的无刷直流电机控制系统,其主要模块单元有:模糊PI速度控制器单元、PI电流控制器单元、换相逻辑单元及电流采样单元等。
控制系统仿真中把S函数与功能模块相结合,在Si mulink平台搭出所设计的仿真模型。在搭建完成并成功验证所搭模型后,对Si mulink里的模块进行反复调用训练,筛选出较好的控制参数和阀值参数。
3.2 模糊PI速度控制器
控制器输入量取自速度给定值和实际反馈速度的差,控制器输出量当作电流环的参考值。通过MATLAB 中的Fuzzy Logic Toolbox 工具箱实现模糊控制,其中的Sat uration 饱和限幅模块将输出的电流值限制在规定的范围内,不能超出规定值。转速模块如图5所示。

图5 转速模块
3.3 PI电流控制器
电流控制器有稳定电流和抑制电压波动的作用。让电流和速度控制器输出量同时改变,既能确保无刷电机得到电流最大值,又能缩短控制过程用时。
通过加入PI电流控制器,在电流采样模块中实现将电流分成三路环节的功能,提高了系统的稳定性。PI电流控制器如图6所示。
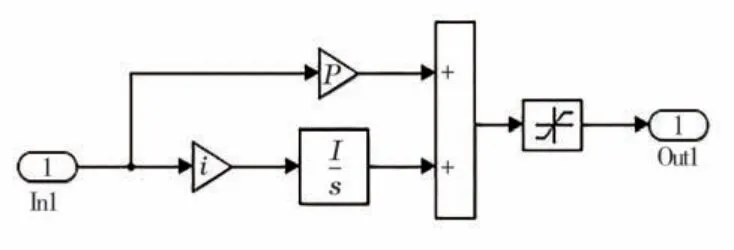
图6 电流模块
电流控制器采用PI控制策略,其输入值取差值,差值来自电流采样值和速度模块输出的电流参考值二者作差,其输出值取自三相整流桥的门控电压值。
3.4 电流采样模块
本文采用的是两两导通方式,处于交替导通状态,为了确保取得精确的采样反馈值,必须确保采样电流的变换过程是正确的,电流采样模块如图7所示。
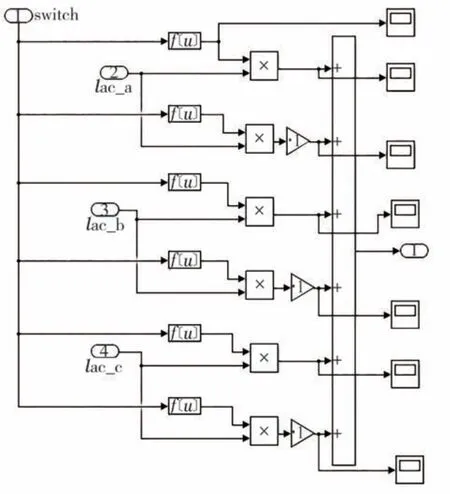
图7 电流采样模块
表4是电流采样模块逻辑表。根据表中反电动势可以确定检测的电流是哪相绕组的电流,并且根据表可检测出电流是流入状态还是流出状态。

表4 电流采样模块逻辑表
3.5 换相逻辑模块
无刷直流电机内部转子的位置信号可以实现无刷直流电机控制系统中逆变器换相功能。使用反电势法来检测无刷直流电机的换相时刻,反电动势法能够使反电势过零点信号推迟30°电角度,引导逻辑开关电路能够正确完成换相。此模块由gates模块和decoder模块构成。gates模块的功能是将所有的霍尔信号变换成梯形波的反电动势信号,再经decoder模块,给逆变单元提供正确的逻辑信号,最终由decoder模块控制逆变桥的状态,完成对无刷直流电机的整个逻辑换相过程,有利于模块对电流采样工作的顺利进行。gates模块如图8所示。

图8 gates模块示意
取三路霍尔信号的相反值作为gates模块的输入,从而得到六路信号,再将六路信号进行逻辑运算得到三相反电动势的信息,输送给decoder模块进行处理。gates模块逻辑如表5所示。
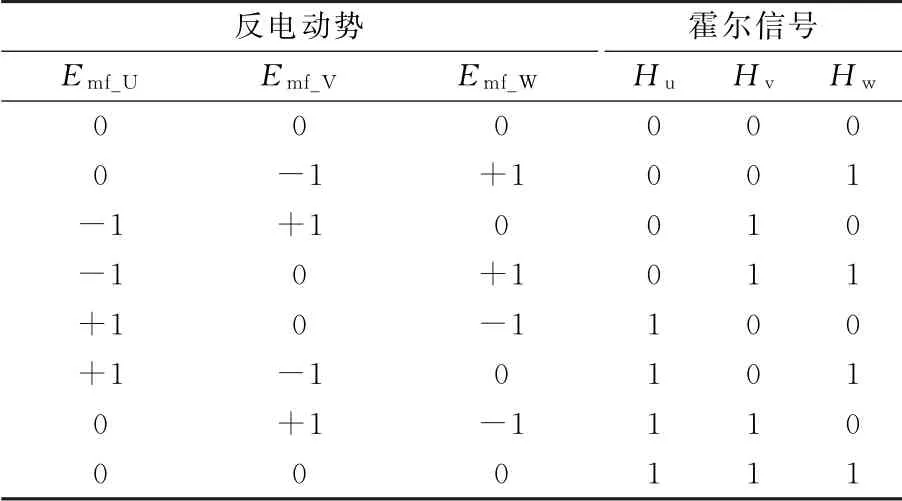
表5 gates模块逻辑表
decoder模块将gates模块输送来的反电动势信号转换成逻辑信号,用来控制三相逆变桥的状态。表6是换相模块中反电动势的信息和解码的信息。decoder模块如图9所示。

图9 decoder模块示意
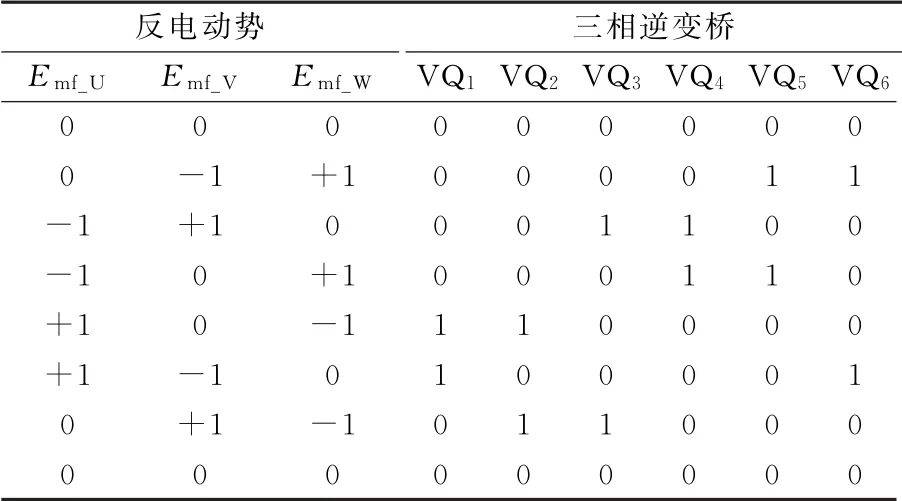
表6 换相模块逻辑表
3.6 控制系统仿真结果分析
仿真实验电机参数:星形连接,极对数pole=4,额定电压Ud=24 V,额定转速n=3 000 r/min,定子相绕电阻R=1Ω,定子相绕组自感L=0.002 6 H,互感M=0.000 5 H,转动惯量J=0.005 kg·m2,阻尼系数B=0,电势系数Ke=0.037 V/rad·s-1。PID 参 数:Kp=8,Ki=3,Kd=0.001。电流PI参数:Kp=5,Ki=2。模糊PI参数:Ke=0.03,kec=0.15,Kp=1,Ki=0.5。电流PI参数:Kp=5,Ki=1。实验过程如下。
(1)控制系统仿真时间设定为0.4 s,设置电机空载启动,规定转速为n=1 000 r/min,则传统PID控制和模糊PI控制转速曲线如图10和图11所示。
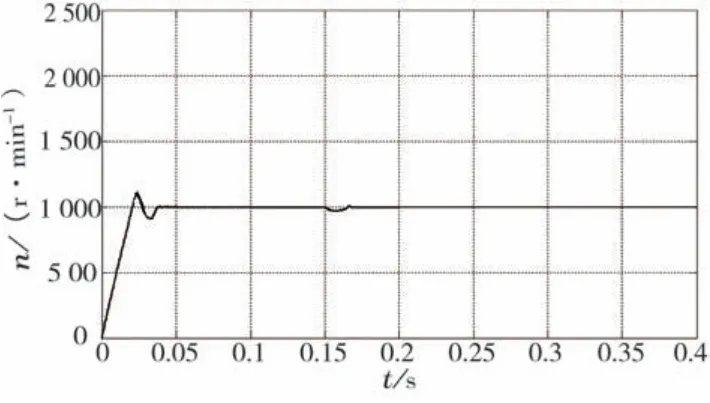
图10 传统PID 速度曲线
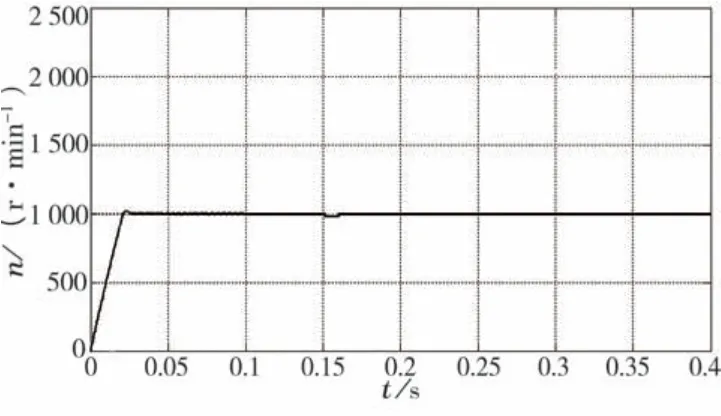
图11 模糊PI速度曲线
(2)控制系统仿真时间设定为0.4 s,电机空载启动,转速为n=1 000 r/min,在t=0.1 s时加负载T1=0.036 N·m,待系统稳定后,在t=0.2 s时,把转速调节为n=2 000 r/min,则传统PID 控制和模糊PI控制速度仿真波形如图12 和图13所示。
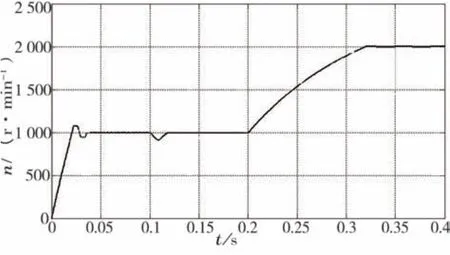
图12 PID 速度仿真波形

图13 模糊PI速度仿真波形
基于上述仿真环境下,由仿真结果可知,与传统PID 控制相比,模糊PI控制具有响应速度快、抗干扰性强,无振荡、有效增强系统稳定性的优点,这是传统PID 控制所不具备的。
4 结束语
针对传统PID 控制的无刷直流电机存在响应速度慢、抗干扰能力弱、有振荡的缺陷,本文设计了一种新型的基于模糊PI控制的无刷直流电机的控制系统。首先在论述无刷直流电机的基本组成单元、工作原理的基础上,对其进行了建模;其次研究了模糊控制策略,搭建了模糊PI转速控制器及电流控制模块、电流采样模块等相关模块;最后通过MATLAB 仿真验证了此控制电路的正确性。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年3期)2022-06-17
成都信息工程大学学报(2021年6期)2021-02-12
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07