基于非线性干扰观测器的飞机全电刹车系统滑模控制设计
2022-01-09 10:22李繁飙黄培铭阳春华廖力清桂卫华
自动化学报 2021年11期
李繁飙 2 黄培铭 阳春华 廖力清 桂卫华
防滑刹车控制是飞机地面滑跑安全系统设计中的关键性难题之一,随着现代飞机性能大幅度提升,对刹车系统安全和刹车效率等提出了更严格的要求,其性能品质与提供刹车力矩的动力源有着密不可分的关联.但是基于传统液压的传统飞机刹车系统弊端日益凸显,如较长的液压管道存在油液泄露危险,机械结构体积大、维护成本高等[1].基于机电作动器(Electro mechanical actuator,EMA)[2]的全电刹车系统,将减速齿轮、滚珠丝杠、无刷直流电机、电磁制动器和检测装置集成化,具有安全系数高、可靠性强、体积小、质量轻、动态性能好、易维护、机内自检测等优势,已经成为未来飞机刹车系统新的发展方向[3−5].
在整个刹车过程中受到多时变参数、垂直与纵向力矩耦合机理以及飞机动力学模型呈现高度非线性特征等因素的影响,使得建立精确的飞机防滑刹车系统模型是十分困难的.文献[6−7]中针对飞机防滑刹车动力学模型,仅考虑了纵向力矩,并假设前轮与主轮摩擦系数相同或直接忽略了前轮摩擦力.然而,飞机防滑刹车系统模型仍需要考虑纵向与垂直方向力矩耦合情况,前轮始终自由滚动,属于动摩擦系数,主轮由EMA 产生刹车力矩,属于静摩擦系数,两者本质上是不同的.同时,前轮承担约10 %~ 15 %的垂直载荷,其摩擦力不应忽视.值得注意的是,现有理论方法并未充分考虑EMA内部结构的数学模型与飞机刹车动力学模型之间的关系.为克服上述局限性,本文建立了一种更适合实际应用的综合飞机防滑刹车系统模型.另一方面,飞机防滑刹车系统性能容易受到跑道表面状况(干燥、潮湿或结冰等)、刹车动静盘摩擦面不均匀、空气阻力、全电刹车作动器内部结构等诸多干扰因素的影响,对整个刹车控制设计与优化带来巨大挑战[8].近年来,针对飞机防滑刹车系统的抗干扰控制设计研究取得了一系列进展,例如:文献[9]为了提高EMA 中伺服控制效果,采用自适应径向基函数(Radial basis function,RBF)神经网络对系统的复合外部干扰上界预估,并将干扰估计值作为控制器补偿项,很大程度上提高了刹车控制的鲁棒性.文献[10−11]对EMA 中减速齿轮变形、开关磁阻电机的非线性干扰分别采用了RBF 神经网络和误差反向传播神经网络进行逼近,预估的非线性函数曲线与实际干扰的误差较小.基于神经网络干扰估计的方法需要事先在离线状态下训练模型,但干扰具有复杂性、时变性,难以获取精确数据作为训练集,因此在线观测的效果欠佳.文献[12]根据控制系统的响应,归纳不同类型的扰动,对刹车系统信号进行统计分析,提取出对干扰最敏感的特征变量.同时,利用概率理论,提出了基于数据预处理、连续隐马尔科夫分类器和贝叶斯滤波器的飞机防滑刹车干扰识别与观测模型.该方法需要大量的实验数据支持.但在实时刹车过程中对干扰的精确估计是非常困难的.本文提出了基于模型改进的非线性干扰观测器方法,无需大量数据且具有对高阶微分干扰的观测能力,引入了控制器的干扰补偿部分,起到干扰抑制的作用.
飞机防滑刹车系统主要采用滑移率控制方式,通过控制滑移率,使得主轮与地面之间的静摩擦系数保持最大值,获得最大的刹车力矩.在过去的几十年里,一批学者和工程师提出的控制算法在飞机刹车领域得到了广泛的应用,例如动态面控制[13]、自适应控制[14]、切换控制[15]、模糊逻辑控制[16]、模型预测控制[17]、滑模控制[18]、极值搜索控制[19]等.考虑到飞机速度、加速度等变量无法准确测量,文献[20]基于卡尔曼滤波器对飞机速度、地面−轮胎结合力进行估计,利用RBF 神经网络对气动扰动进行观测和补偿,根据能量消耗估计制动盘摩擦系数的变化规律,结合跑道辨识技术形成高效的防滑刹车控制策略.文献[21]提出了一种将滑移率和减速率作为输入变量的比例−积分−微分控制方案,能够稳定在任何最佳滑移率平衡点附近,从实用性角度来说对硬件性能要求较低.文献[22]采用反步动态面控制和非对称障碍李雅普诺夫函数相结合方法,既能快速跟踪最佳滑移率,又能保证输出约束的有界性和整个系统的稳定性.文献[23]针对电静液作动器系统,利用开关阀阵列元件的间断特性,提出了基于相平面分析的多阀阵列控制策略.文献[24]采用动态LuGre 摩擦系数模型来表征结合力矩,利用双状态观测器估计模型的不可测内部摩擦状态,在线求解LuGre 模型的伪稳态模型极值,得到摩擦系数的最大值和相应的最佳滑移率.上述工作对防滑刹车控制做出了较深入的研究,但在提升防滑刹车控制性能方面,以下几方面问题需要进一步考虑.首先,现有的飞机防滑刹车控制目标主要是跟踪一个恒定的滑移率信号.但滑移率容易受到跑道状态、飞机速度等影响而具有时效性,其最大值由最佳滑移率表示,因此本文提出控制目标为跟踪时变的最佳滑移率信号.其次,传统控制方法难以跟踪变化的最优值,尤其在低速段误差较大,甚至出现打滑现象.应用于刹车系统的滑模控制方法均为常规形式,仍存在由滑动运动引起的抖振现象.本文将递归结构的快速终端滑模控制器与改进的非线性干扰观测器结合,以实时跟踪最佳滑移率,达到飞机防滑刹车的目的,有效抑制了抖振对刹车性能造成的影响.
针对不确定性干扰条件下的高阶非线性飞机防滑刹车系统,提出了一种基于非线性干扰观测器的快速终端滑模控制方法,以达到较好的动态跟踪控制性能,在消除了滑模抖振的同时也满足了实时在线估计的要求并实现干扰抑制的目标.与现有部分研究成果相比,本文的主要贡献归纳为如下几个方面:
1)本文提出了一种更适合于实际应用的刹车系统综合建模方法,充分考虑了作动器内部机械结构运动的数学模型、主轮−地面结合系数影响因子、前轮滚动摩擦力以及垂直与纵向力矩耦合机理,并通过反馈线性化处理,形成线性标准系统模型.
2)针对刹车过程中易受到不确定性干扰的影响,提出了改进的非线性干扰观测器方法,具有对高阶微分干扰的观测能力,并在控制律设计中作为干扰补偿部分,使得刹车控制的抗干扰能力加强,鲁棒性得到提升.
3)深入分析了轮胎打滑的影响因素,设计递归结构的快速终端滑模控制器并建立稳定性条件,实现了飞机全电防滑刹车控制系统的有限时间快速收敛并显著提高了刹车效率.
1 问题描述
飞机防滑刹车系统的动力学模型建模一般包括飞机机体动力学、单个主轮受刹动力学、静摩擦系数和机电作动器等部分.各个子系统模型之间存在强关联耦合,并表现出强非线性、强复杂性等特征.根据防滑刹车的实际过程与客观事实,做出如下合理假设:
1)将飞机机体与起落架视为理想刚体,可简化成集中质量,刹车过程质量恒定不变.
2)假设飞机保持沿着直线滑行方向,没有横向力影响.
3)前轮自由滚动,没有刹车力矩作用,滚动摩擦系数恒定.
4)假设左右侧机轮垂直载荷一致,安装主轮的刹车装置实时同步控制,对主轮产生相同的制动效果.
根据假设1)~3),建立飞机机体受力图如图1所示,图中具体参数描述见表1.考虑空气动力特性影响,飞机纵向运动方程、垂直方向平衡方程和质心力矩平衡方程分别为
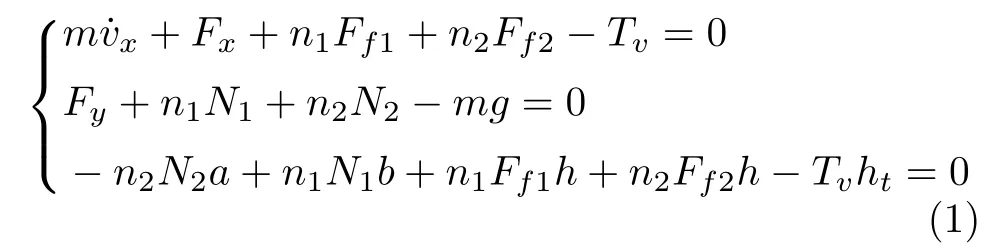
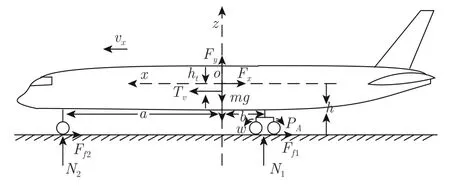
图1 飞机机体受力图Fig.1 Force diagram of aircraft fuselage
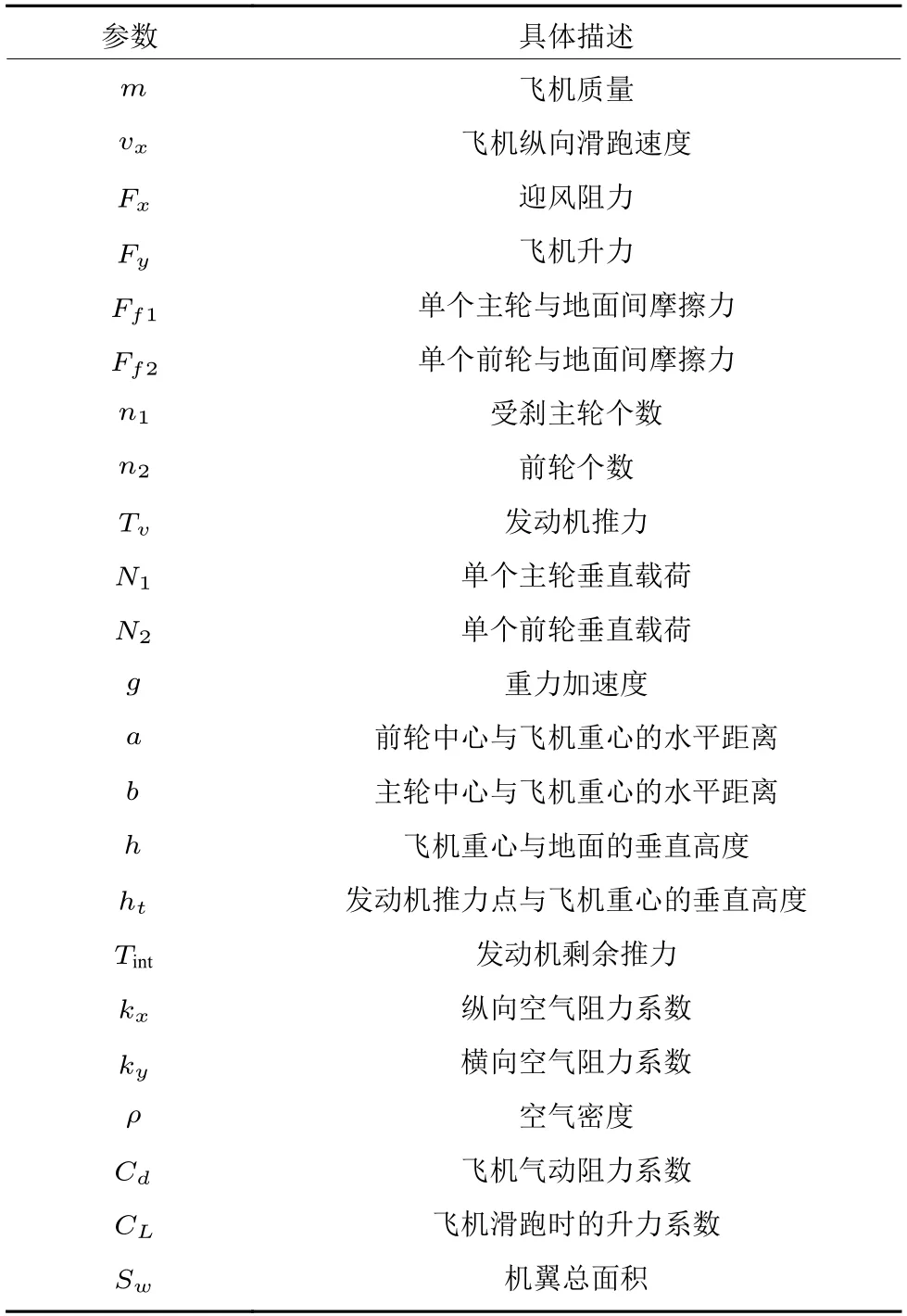
表1 飞机防滑刹车系统参数Table 1 Parameters of antiskid braking system
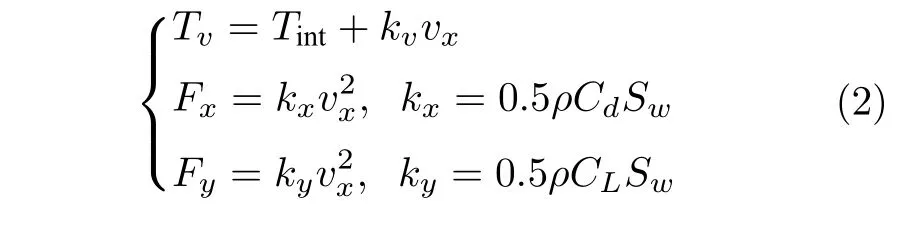
其中,Tv、Fx、Fy的表达式为
由假设4),只需考虑单个主轮受刹情况,主轮刹车的受力分析如图2 所示,其动力学方程为
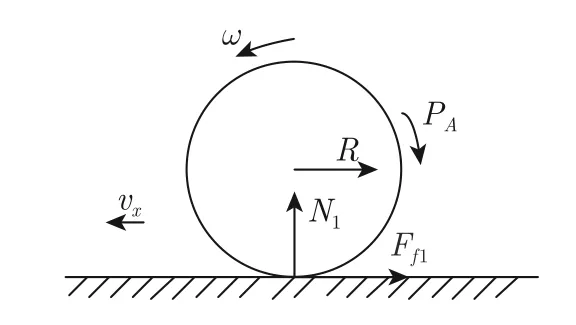
图2 单个主轮受力分析图Fig.2 Force analysis diagram of single main wheel

其中,Jw为主轮转动惯量,w为机轮角速度,R为主轮有效半径,kb为刹车力矩与压力转化系数,PA为作用在刹车盘上的压力.
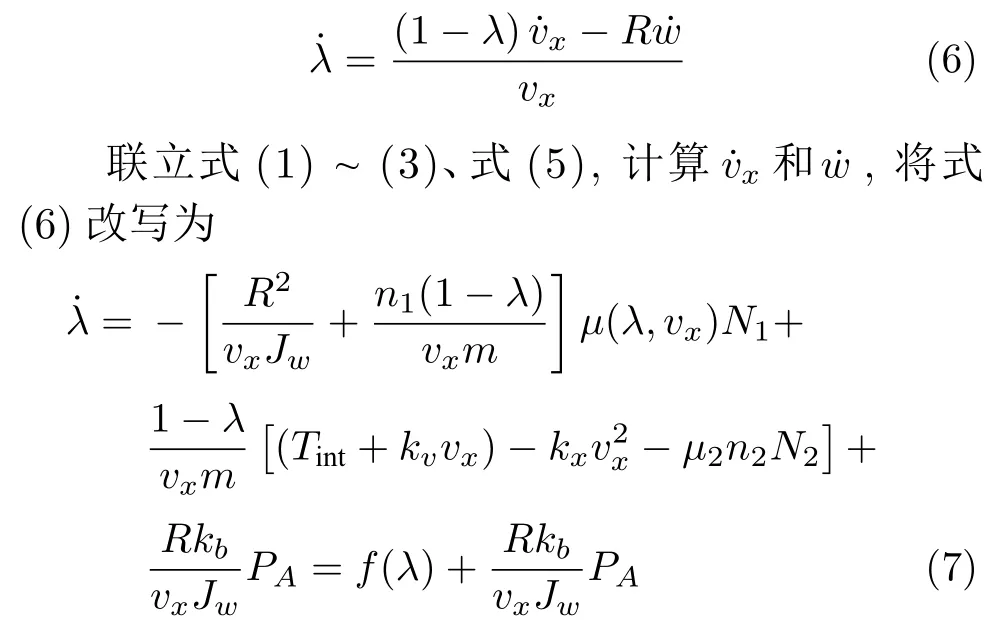
在飞机滑跑阶段,机轮受到刹车力矩的作用,使得飞机速度与机轮速度始终保持vx >Rw关系,由此定义滑移率λ,表示机轮相对跑道的滑动运动比率

可知滑移率的范围为:λ∈[0,1) .飞机刹车依赖于主轮与地面间结合力Ff1,影响Ff1大小的因素称为结合系数µ(λ,vx),定义为

根据假设(3),设定µ2为恒定的前轮滚动摩擦系数,因此单个前轮摩擦力为Ff2=µ2N2.对式(4)求导可得
根据文献[25]提出的摩擦系数模型,静摩擦系数方程为

其中,ci(i=1,2,3,4) 为与实时跑道状态、飞机速度等因素有关的系数.通过改变这些参数,可以建立不同的地面接触摩擦系数模型.表2 列出几种不同跑道状态下的具体参数,图3 为干沥青跑道状态下静摩擦系数模型曲线,图4 为在飞机速度vx=30 m/s条件下不同跑道状态µ-λ曲线.
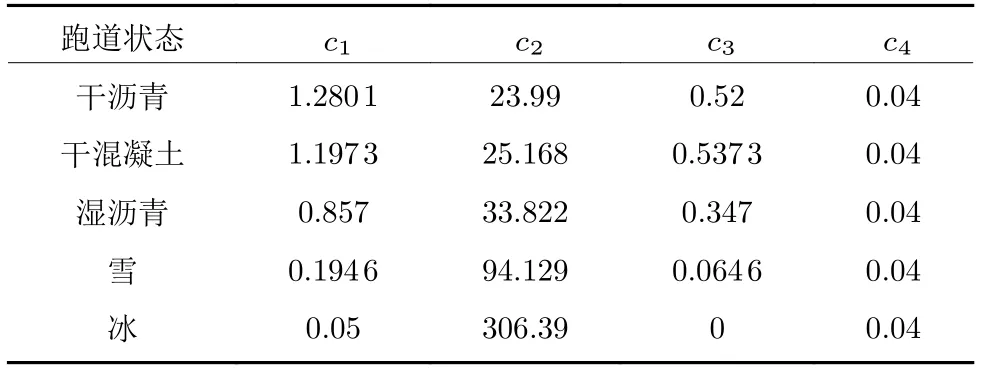
表2 摩擦系数模型参数Table 2 Parameters of friction coefficient model
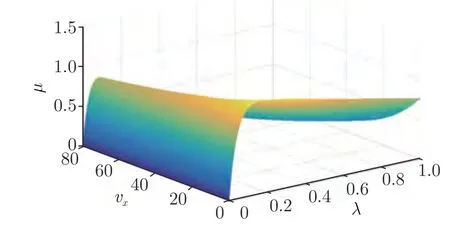
图3 干沥青跑道摩擦系数模型曲线Fig.3 Curve of friction coefficient model on dry asphalt runway
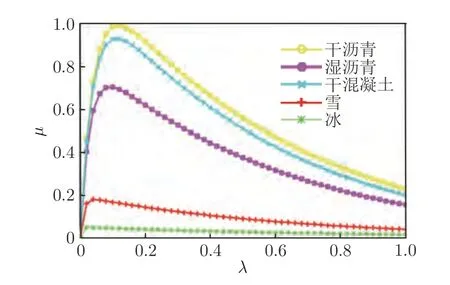
图4 v x =30 m/s 不同跑道状态 µ -λ 曲线Fig.4 Curve of µ -λ on the different runway conditions with v x=30 m/s
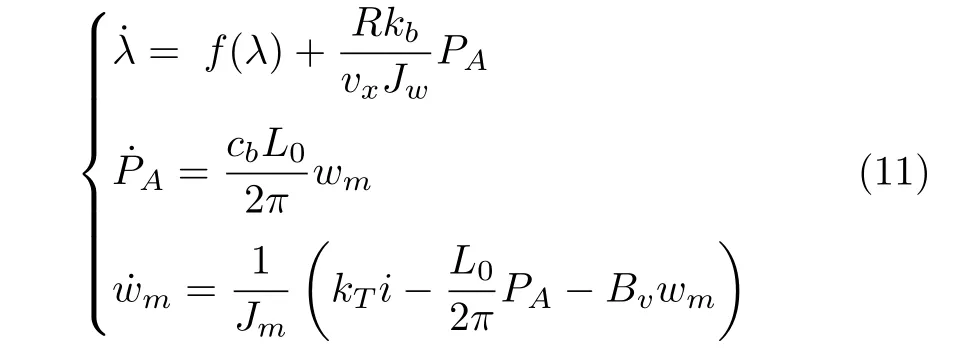
防滑刹车驱动部分采用机电作动器,其由无刷直流电机通过减速齿轮驱动滚珠丝杠,丝杠沿着轴方向旋转运动,驱动压紧盘对刹车盘加压,产生刹车力矩.当释放刹车压力时,电机反转,丝杠回退.EMA 机械子系统和电气子系统模型分别为

其中,为cb刹车盘刚度系数,L0为滚珠丝杠行程,wm为转子角速度.

其中,Jm为转子转动惯量,kT为电机转矩常数,i为电枢电流,Bv为粘滞阻尼系数.
联合式(7)、(9)和(10)可得到完整的飞机全电刹车系统模型为
选取状态变量x=[λ PA wm]T,输入变量u=i,输出变量y=[λ00]T.考虑到实际飞机防滑刹车过程中存在不确定性干扰,将式(11)改写为
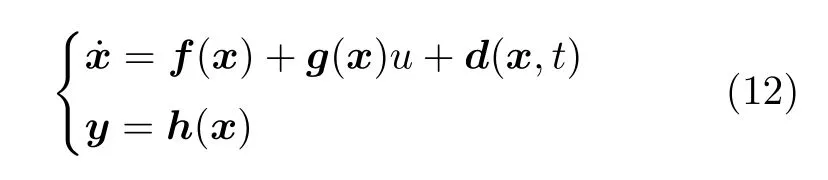
其 中,d(x,t)=Δf(x)+Δg(x)u+fd,Δf(x)、Δg(x)u为参数摄动引起的内部干扰,fd为时变和未建模部分引起的外部干扰.系统(12)中的相关向量参数及输出函数为
针对式(12)全电刹车非线性系统,进行反馈线性化处理[26−27],基于微分几何理论对系统模型坐标变换为初始:

2 基于干扰观测器的滑模控制
本节将设计飞机防滑刹车系统的干扰观测器,并考虑基于递归结构的快速终端滑模控制设计和稳定性分析.
2.1 非线性干扰观测器设计
针对系统(13),推广至n阶系统,对干扰进行预估[28],其观测值为
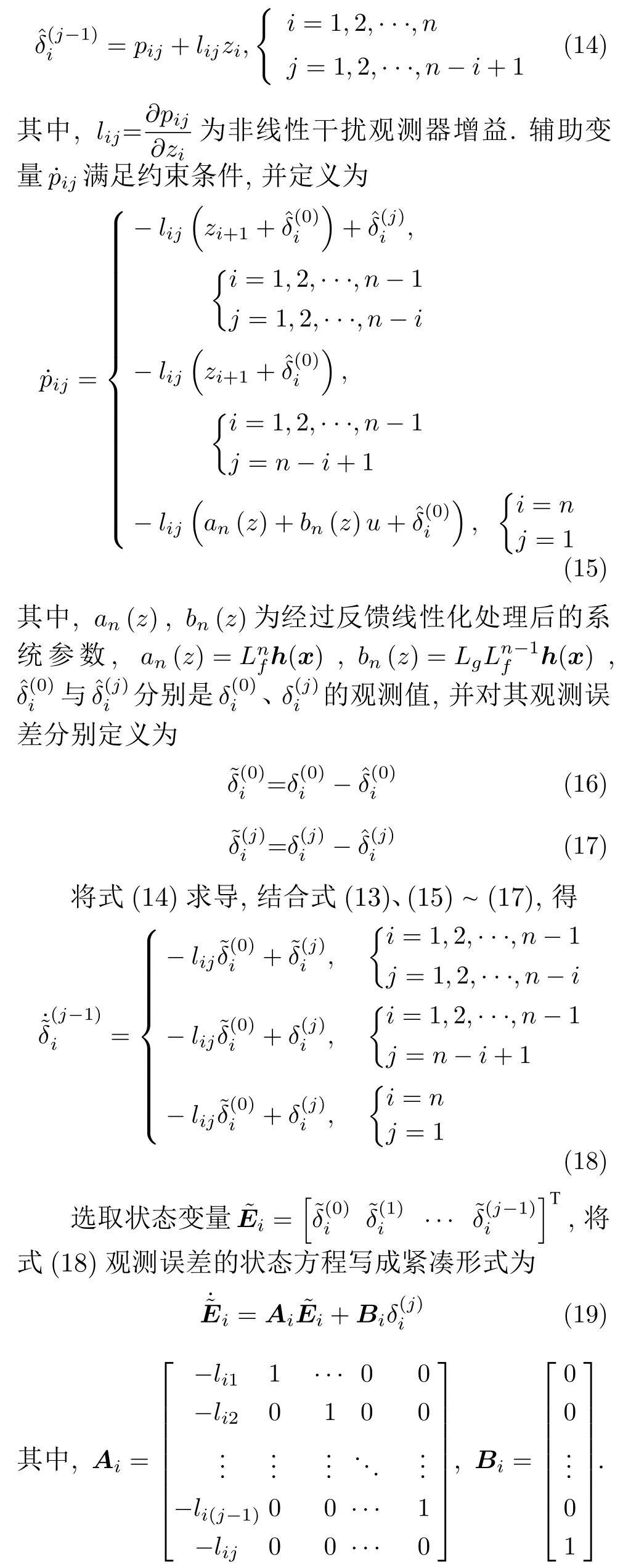
选择合适的非线性干扰观测器增益矩阵Ai,总能找到一个正定矩阵Pi,使得矩阵Ai特征值满足如下不等式

其中,Qi为给定的正定矩阵.定义Lyapunov 函数为

对式(21)求导,并结合式(19)~ (20),得
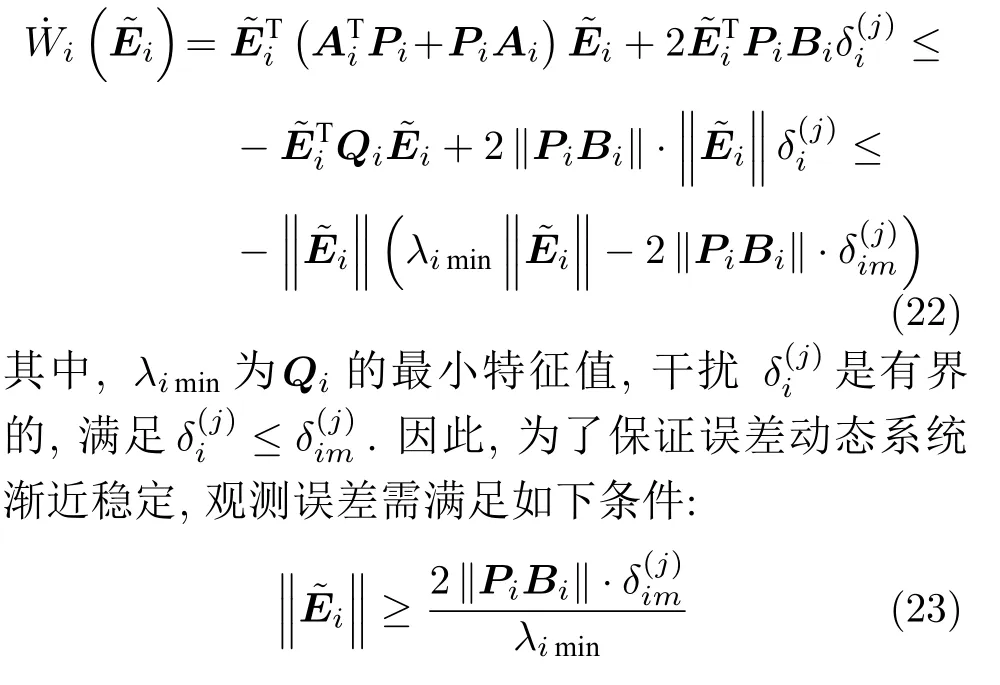
由式(23) 可知,观测器增益矩阵Ai决定了|Pi|/λimin比率的大小,对观测误差动态系统的稳定性起着决定性作用.选择较大的非线性干扰观测器增益值,可以降低干扰观测误差,同时也带来弊端,如:增加了观测器对干扰预估的灵敏度.此外,针对干扰,若导函数的阶次越高,会导致观测精度下降.因此,非线性干扰观测器增益矩阵Ai的选择需要对期望的精度和观测质量之间进行权衡.
最后,要求每一阶次 (i=1,2,···,n) 的干扰观测器设计满足式(18)~ (23),使得全局稳定,推广至全局Lyapunov 函数为
根据本文提出的飞机防滑刹车系统阶次,取n=3.
2.2 控制目标
通过单个主轮受刹动力学方程与地面与主轮间摩擦系数方程分析µ与λ之间的关系来判断是否处于打滑阶段,进而明确控制目标.
结合式(5),可将式(3)改写为

考虑给主轮一个较小的刹车压力 ΔPA,满足假设(1)~ (3),将主轮受到的垂直载荷视为恒定,则

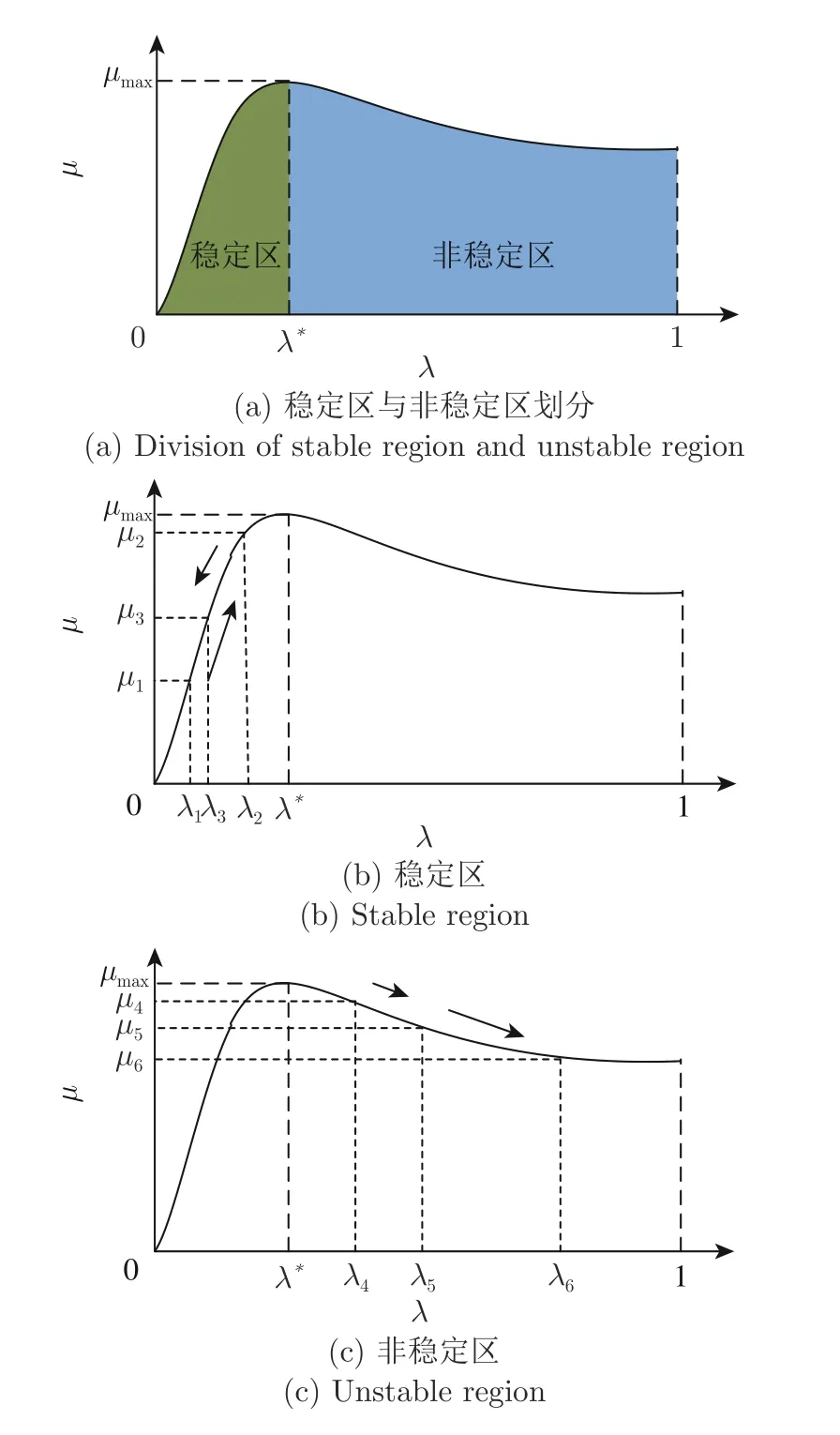
图5 λ 与 µ 关系曲线Fig.5 Relational between λ and µ
基于上述分析,飞机防滑刹车控制目标为跟踪最佳滑移率,以获得最大结合力矩,同时确保了主轮处于稳定工作区域.由静摩擦系数模型(8)可知,最大摩擦系数受跑道状态、飞机速度、滑移率等因素影响.因此,每个时刻的最佳滑移率是变化的,下面将设计基于非线性干扰观测器的滑模控制,以达到良好跟踪效果.
2.3 快速终端滑模控制器设计
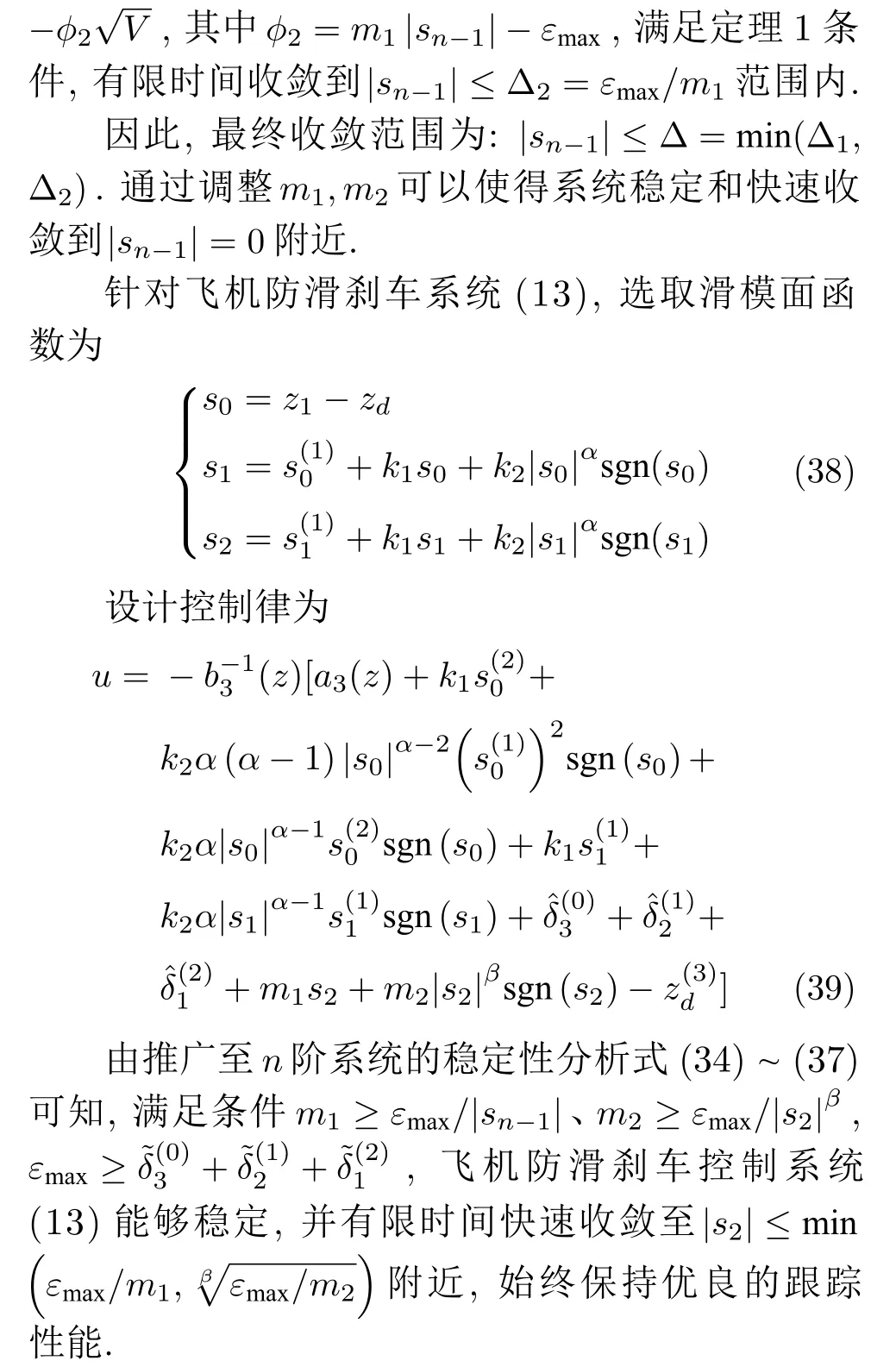
定理 1[29].若Lyapunov 函数V(x) 满足如下不等式

其中,β1>0 ,0<β2<1,V(x) 可以有限时间收敛至零,收敛时间为

本节提出一种递归结构的快速终端滑模控制方法,该方法受到文献[30−31]所提出的一类快速终端滑动模态的启发.针对高阶系统,选取滑模面为
基于反馈线性化和非线性干扰观测器的飞机防滑刹车递归型快速终端滑模控制系统总体算法框图如图6 所示,各功能部分协同配合,形成一个完整的闭环控制.
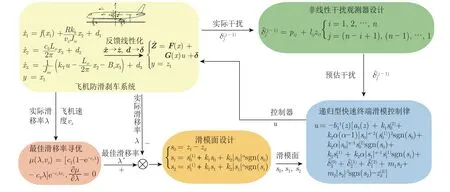
图6 飞机防滑刹车闭环控制总框图Fig.6 General block diagram of aircraft antiskid brake closed-loop control
3 仿真分析
为验证所建立的模型与控制律的有效性,以文献[32]中的飞机模型参数在MATLAB 环境下进行仿真试验,并给出两个实例.第一种情况是在良好条件的跑道下仿真,即干沥青跑道,第二种情况是低摩擦系数的极限工况跑道下仿真,即雪跑道.根据假设(3),前轮在整个刹车过程处于自由滚动,摩擦系数恒定,即干沥青:0.38,干混凝土:0.35,湿沥青:0.32,雪:0.13,冰:0.03.
飞机着陆初始速度vx(0)=72 m/s,初始主轮角速度w(0)=180 rad/s ,机轮初始滑移率λ(0)=0 .当飞机速度小于 5 m/s,认定防滑刹车控制结束.控制器相关参数设定为:α=0.6,β=0.6 ,k1=28.5,k2=0.2 ,m1=200 ,m2=100 .对原系统(12)引入干扰为:d1=0.01 sin(3t),d2=0,d3=200 sin(3t+π/2)+50 .
飞机防滑刹车控制性能指标为刹车效率和刹车距离,其中刹车效率包括最佳滑移率跟踪效率和摩擦系数制动效率
针对图8 和图9 中关于本文提出的递归型快速终端滑模控制方法在不同跑道状态下的仿真试验结果进行分析.图8、9 (a)为在两种跑道状态下飞机速度和机轮速度的对比曲线,飞机速度与机轮速度减速平稳,没有出现较大的波动和机轮深打滑的现象.图8、9 (b)为在两种跑道状态下飞机刹车距离曲线,刹车性能指标如表3 所示.从图8、9 (c)可以看出控制器能够快速准确地跟踪实时变化的最佳滑移率,始终处于稳定区域,跟踪误差快速收敛,虽然在冰跑道仿真的滑移率跟踪存在一定抖振,但是在可接受范围,经过一段时间后误差逐渐收敛到很小范围.此外,根据式(8)得到的摩擦系数保持在最大值附近,全电刹车作动器输出最优的刹车力矩,从而获得理想的刹车效率,如图8、9 (d)所示.
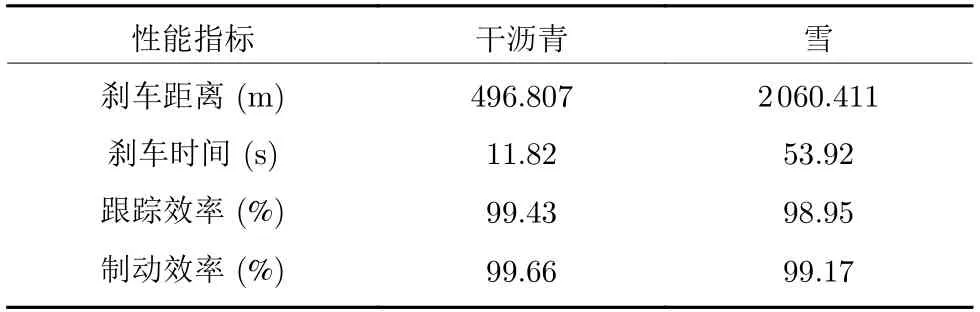
表3 飞机防滑刹车性能指标Table 3 Aircraft antiskid brake performance index
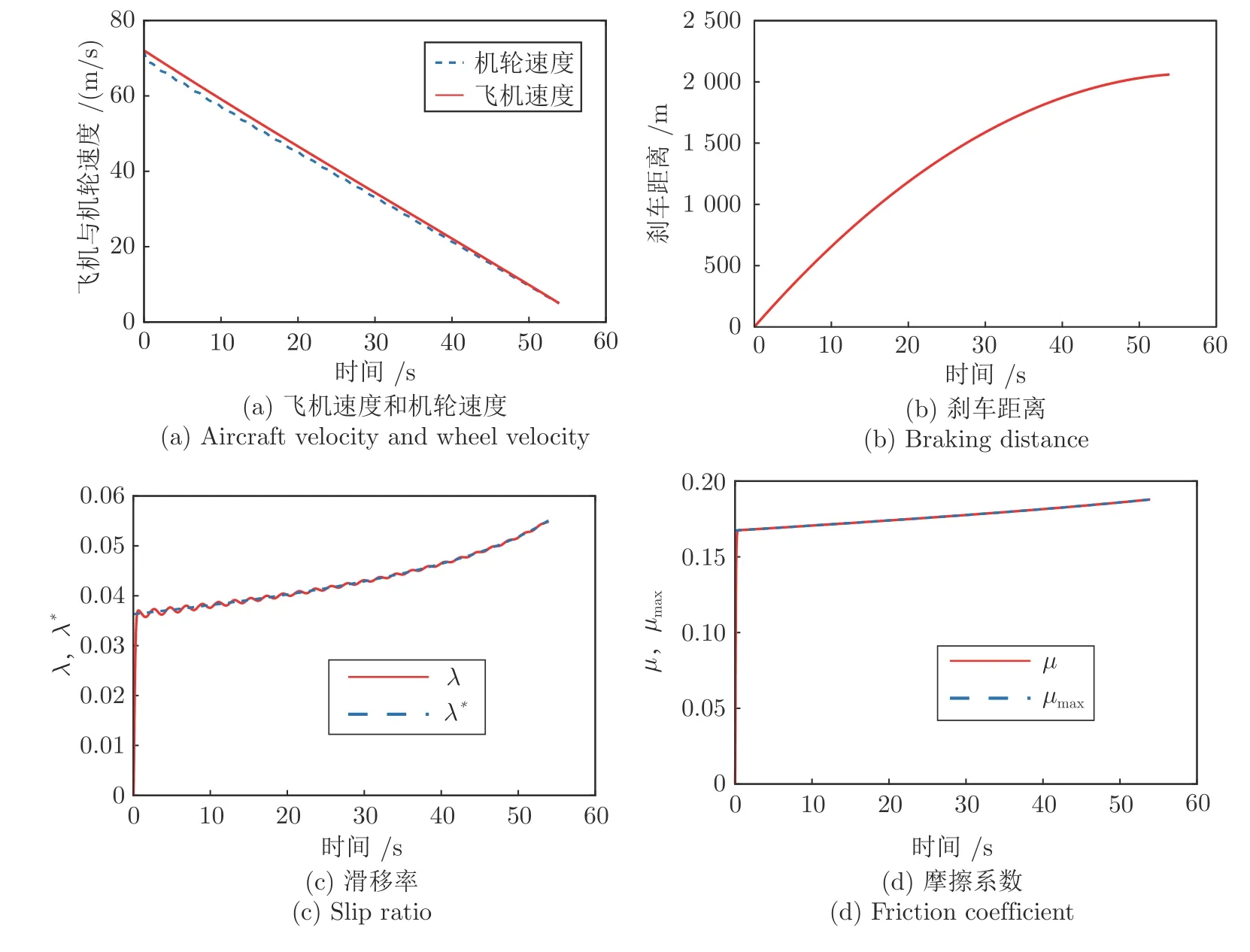
图9 雪跑道状态下飞机防滑刹车控制仿真结果Fig.9 Simulation results of aircraft antiskid brake control under snow runway condition
与此同时,设计了传统的快速终端滑模控制方法进行对比,在干沥青跑道状态下进行仿真试验,如图8 所示,得到防滑刹车性能指标为:刹车距离506.026 m,刹车时间11.95 s,跟踪效率98.13 %,制动效率98.59 %.与本文提出的控制方法在性能方面进行比较,如表4 所示.
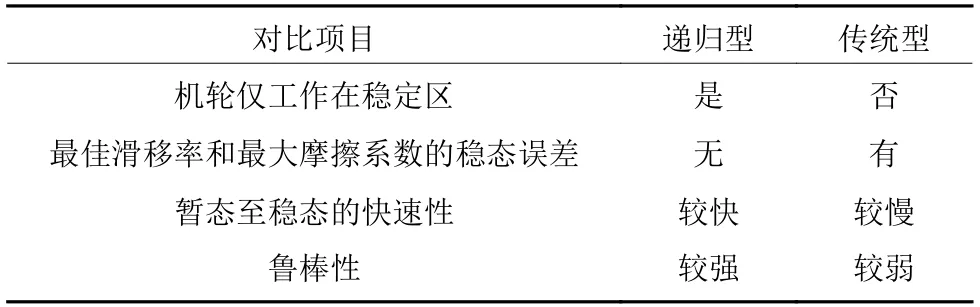
表4 两种控制方法性能对比Table 4 Performance comparison of the two control methods
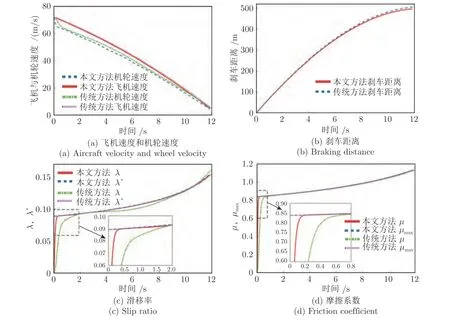
图8 干沥青跑道状态下两种控制方法的飞机防滑刹车控制仿真结果Fig.8 Simulation results of aircraft antiskid brake control with two control methods under dry asphalt runway condition

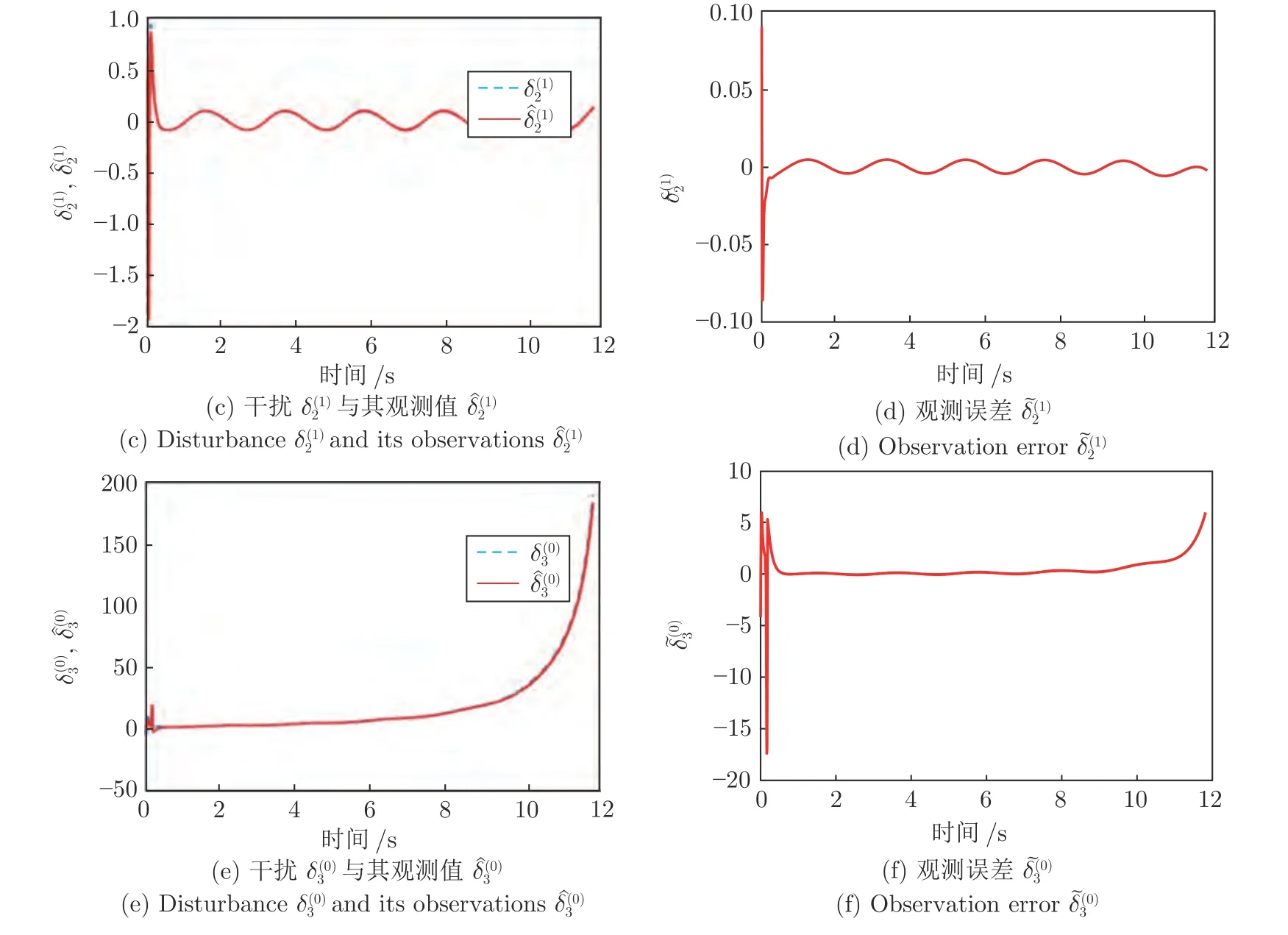
图7 干扰观测仿真结果Fig.7 Simulation results of disturbance observation
从仿真结果可以看出,传统的快速终端滑模控制方法对最佳滑移率的跟踪效果欠佳,具体表现在快速性较差、存在稳态误差、易受干扰影响等.随着刹车过程滑移率逐渐加大,在低速阶段实际滑移率大于最佳滑移率,此时刹车状态处于不稳定区,主轮出现了打滑现象.根据对比两者刹车性能可知,本文提出的递归型快速终端滑模控制方法具有较好的跟踪性能,显著提高了防滑刹车效率和稳定性,更具有实用价值.
4 结论
本文研究了飞机防滑刹车系统的非线性干扰观测器设计和最佳滑移率跟踪控制问题.通过反馈线性化方法,建立了实际刹车不确定性干扰条件下的全电式防滑刹车系统的标准线性化模型.对此,设计了一类新颖的递归结构的快速终端滑模控制器,在有效降低滑模动态抖振影响的同时,使飞机防滑刹车系统满足有限时间快速收敛性条件.此外,结合非线性干扰观测器对不确定性干扰进行在线估计,通过在控制率中引入干扰补偿器有效提升了刹车系统的鲁棒性和干扰抑制性.最后,通过数值模拟仿真,验证了本文提出的飞机全电刹车系统滑模控制设计不仅可以防止主轮打滑锁定,而且在整个制动过程中,具有良好的性能品质以及较高的制动效率.
在今后的研究中,将进一步考虑飞机刹车过程中受到横向不对称载荷引起偏离跑道中心线的调整控制,同时将滑模控制方法与其他优化控制方法相结合,发展新型高效跟踪最佳滑移率的控制策略.
猜你喜欢
中外公路(2022年1期)2022-05-14
装备制造技术(2021年4期)2021-08-05
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
电测与仪表(2015年19期)2015-04-09
上海金属(2014年3期)2014-12-19
中国自行车·骑行风尚(2014年2期)2014-05-07