站式三维激光扫描仪在海上钻井平台井架病灶检测与修复中的应用
2022-01-08 03:06胡玉祥范珊珊徐潇熊文辉孟庆年
城市勘测 2021年6期
胡玉祥,范珊珊,徐潇,熊文辉,孟庆年
(1.青岛市西海岸基础地理信息中心有限公司,山东 青岛 266000; 2.青岛市勘察测绘研究院,山东 青岛 266032;3.山东省海岸带调查监测工程技术协同创新中心,山东 青岛 266032; 4.青岛海洋技师学院,山东 青岛 266002)
1 引 言
伴随着三维激光扫描技术的发展,利用扫描仪快速获取三维空间信息,真实还原物体的三维实景,成为近几年迅速发展的热门话题[1,2]。激光扫描仪能够在单位时间内发射数百万激光点,真实记录物体的三维空间形态和纹理信息,具有很高的测量效率、较高的测量精度、动态反映物体实景等优点。地面三维激光扫描仪通过固定地方扫描,具有精度高、扫描速度快、点云噪音小等优点,克服了传统测量技术的局限性,在有效距离范围内能够真实还原物体的三维空间形态,尤其对于采用传统方法施测困难甚至无法实施的空间异性结构,该方法优势明显。
海上钻井平台主要由平台、桩腿和升降结构组成,平台能沿桩腿升降,因而对桩腿的空间相对位置关系要求较高。海上通常风力较大、空气潮湿,随着时间的增长,船坞上的桩腿结构会发生变形,导致升降机升降受阻甚至无法正常运行,平台上的桩腿相对位置固定,但其具有体积大、高度高,随着海面晃动等特点,采用传统测量手段获取其准确的空间位置和细部结构的微小变化难度较大,目前三维激光扫描技术应用于井架检测与修复的文献较少。结合三维激光扫描技术的优势,本文依托某海上钻井平台井架病灶检测与修复项目,分析站式三维激光扫描仪用于该项目的可行性和优势,总结三维激光扫描技术的作业流程及关键技术方法,该手段很好地解决了传统测量方法无法解决的难题,为后续决策提供了宝贵的数据支撑和实践经验。
2 数据采集及处理
三维激光扫描仪作业流程主要涉及外业扫描以及内业数据处理两部分。外业扫描主要涉及现场踏勘、控制点选埋、标靶布设、架站选择以及数据采集几部分;内业数据处理主要涉及点云拼接与优化、点云去噪、坐标转换、点云融合、纹理信息提取及三维建模等环节,如图1所示。

图1 作业流程
2.1 外业扫描
(1)控制点选埋
地面三维激光扫描仪有的可以直接利用特制标靶进行绝对定向,获取扫描点云的绝对坐标(例如徕卡高精度扫描仪P系列);有的则通过视觉追踪技术根据特征点将测站点云拼接为一个空间整体(例如徕卡RTC360),此整体是相对的,需要进行点云绝对坐标的配赋才能得到绝对坐标点云,此类扫描仪相对精度较高,但绝对精度往往取决于已知控制点的精度和密度。如果外业扫描过程中给标靶绝对坐标位置,需要在被扫描物体周边布设一定量的控制点,控制点布设以方便利用为原则:控制点的精度要满足要求;一个控制点至少与另一个控制点进行通视;控制点最好通过导线测量方式联测。
(2)数据采集
本文以P40为例,介绍外业数据采集的主要过程:外业数据采集过程类似于全站仪操作,大致包括对中整平、仪器安置、扫描参数设置以及换站等几个过程:首先在已知控制点上架设扫描仪,对中整平,设置扫描参数;对于测站通视的已知控制点上架设标靶,对中整平,通过扫测已知控制点标靶得到远处未知点坐标标靶;以此类推,便可以一站一站完成外业扫描工作。P40主要性能指标如表1所示。
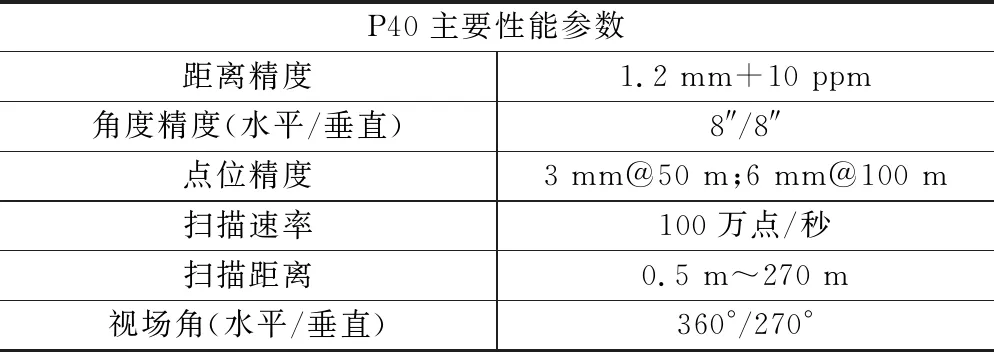
三维激光扫描仪性能参数 表1
2.2 数据处理
(1)点云拼接和优化
点云拼接是将多站扫描数据拼接到一个整体的过程,外业扫描过程如果直接得到的是绝对坐标点云,内业只需要将不同测站电源复制到同一视图下便可以得到整体点云效果;如果外业采集是基于特征点扫描,内业则需要通过特征点将不同测站点云拼接到一起,此过程即是寻找公共特征点进行归一化处理的过程。
(2)点云去噪
外业扫描过程中难免会受到各种因素的影响导致点云中含有噪声,点云去噪就是根据一定的点云滤波算法,让有效点保留,无效点删除的过程。点云去噪可以采用点云后处理软件的点云过滤算法,设置一定的噪点过滤阈值,自动去除无效点云;对于一些特殊点云,则需要通过手动去除噪点。
(3)坐标转换
如果外业扫描过程中未使用绝对坐标系,三维激光扫描仪扫描的点云仅是点与点之间的相对位置关系,这就需要坐标转换。坐标转换通过公共点(公共标靶)来计算转换参数,转换过程通常利用布尔莎7参数模型,即:
(2)
式中,3个平移参数[△X△Y△Z]T,3个旋转参数[εXεYεZ]T和1个尺度参数m,无单位。
(4)纹理提取
外业扫描过程中获取物体的纹理信息,由于物体的纹理信息较为复杂,加之外业扫描过程中受物体反光率、遮挡、拍摄角度、光线等的影响,直接将纹理照片贴敷到点云上效果较差。这就需要借助专业图片处理软件PS等进行裁剪、扭转、滤镜、晕色等处理,在模型构建时调用物体的正射纹理信息。
3 海上钻井平台井架病灶检测与修复
3.1 项目需求
中国海油青岛分公司某海上钻井平台井架如图2所示,每座钢架构三根桩(长度约 140 m),在空间上理论上是正三角形,每两根桩之间(间距约 10 m)有水平拉筋(直径约十几厘米)和斜拉筋用于连接支撑空间结构,每根桩两侧有齿条(齿口间距是固定值,约 25 cm)用于升降。由于长期海风、磨损以及其他方面的影响发生变形,目前井架只能降,不能升,降幅最大为 30 m左右。为了找出井架病灶的具体位置,需要进行下述工作:

图2 井架结构示意图
(1)检测三个钢柱之间的空间位置关系;检测钢柱支撑杆相互位置关系;检测6根齿条间的相互位置关系,并依此发现病灶部位;
(2)检测替换段形状以及与母架之间的关系,保障替换段与母架准确焊合。
3.2 控制点布设
在船体两个平台高程和岸边选取6个~8个点,采用高精度全站仪测量距离、角度,建立一个高精度三维控制网(图3)。以徕卡TS50全站仪为例,其测角精度为0.5″,测距精度为 1 mm+1.5 ppm,平均距离 30 m,通过估算可以使控制点的点位精度在 1 mm内。

图3 控制点布设示意图
3.3 外业扫描
(1)在合适的地方(能看到至少3个~4个控制点,同时尽可能多扫描到井架结构)架设并整平扫描仪,采用自由设站法,先扫描控制点上的靶标,再扫描井架结构,据此实现不同站扫描点云的准确配准,完成全部井架的扫描,如图4所示。
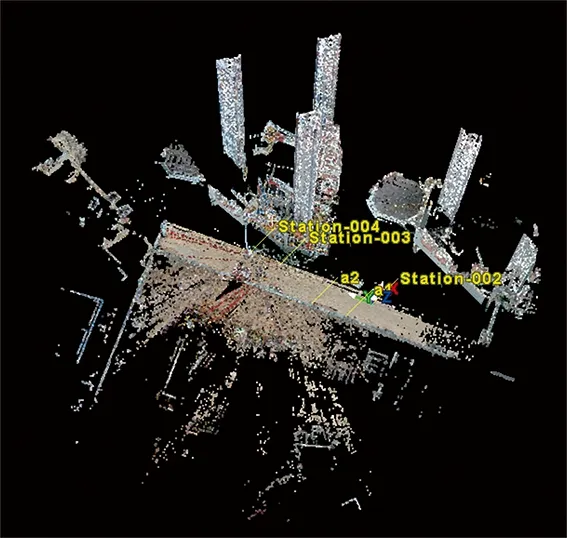
图4 外业扫描示意图
(2)以徕卡P40扫描仪为例,其在 110 m内的距离测量精度为 1.2 mm,角度测量精度为8秒,因此平均单个点云测量精度小于 4 mm,建模精度优于 3 mm。采用自由设站模式可以保证每个扫描站测量的精度一致。考虑到靶标点 2 mm误差(点云拟合标靶中心误差),基于4点的自由设置导致仪器位置误差小于 2 mm,从而可以保证最终模型精度在 3 mm。
(3)基于扫描点云构建实际井架模型。同时根据井架设计图建立设计井架模型。通过选取实际模型和设计模型不同公共点组合,以两个模型最大部分重合为目标,实现两个模型的匹配,通过模型比较求差,通过色谱图表示两个模型的偏差。并初步得到井架变形较大部位。
3.4 病灶确诊
徕卡P40专业点云后处理软件Cyclone具有良好的可扩展性,通过开发相应的插件可以实现点云数据与一些专业绘图软件(AutoCAD、EPS、MicroStation、ArcGIS等)进行互通。首先进行坐标系的旋转和网格建立,定义参考面,使得点云便于人眼识别提取,然后利用Cyclone进行点云的切片处理;利用CAD插件CloudWorx导入切割好的点云数据,在CAD中绘制相应的图形。
经过点云的优化处理后,通过最小二次平滑滤波,得到钻井平台最优的点云数据利用cloudworx切割平台纵、横以及不同视图的断面(图5),通过CAD绘图得到最终的成果图(图6)。

图5 点云切割示意图
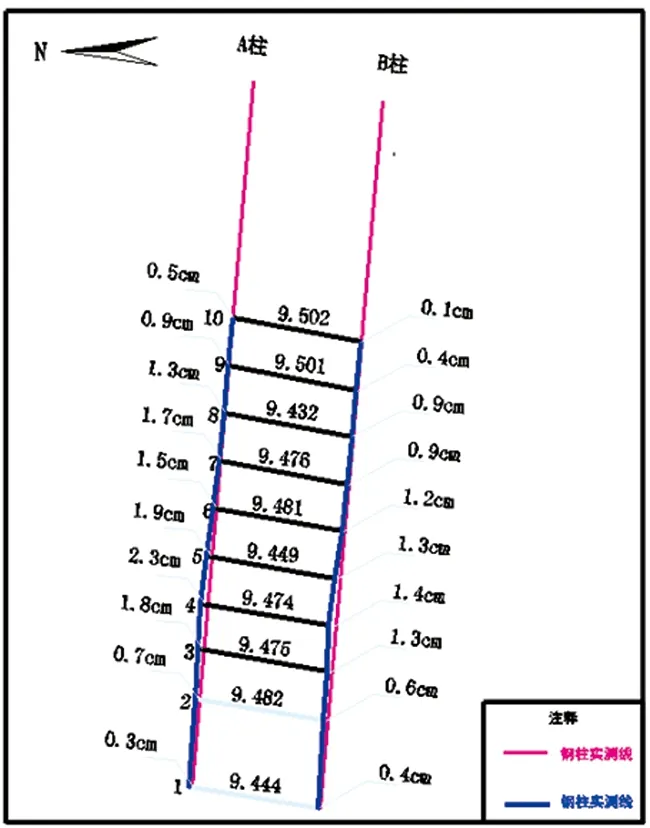
图6 偏差示意图
3.5 替换段测量与焊接
将损坏的部分切除后,需要用一段新的部分替换。为了使替换段很好地与母架对接,采用激光跟踪仪测量,如图7所示。
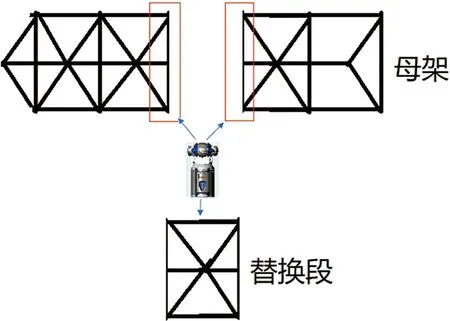
图7 病灶修复示意图
(1)测量替换段,建立其三维模型,通过与设计模型比较检验其精度;
(2)测量母架切后两端构件表面点坐标,通过数据处理得到两端准确的三维空间关系,据此加工修正替换段(或母架两端)。
(3)当替换段安置到母架相应位置后,对两端接缝段进行测量,保证其位置正确后,完成焊接。
4 结 论
三维激光扫描技术采用非接触实体方式进行测量,能够在单位时间内发射数百万点快速获取物体的三维空间形态,同时获取被扫描物体的精细纹理信息,经过后续专业点云处理软件可以提取有用信息,基于点云可建立被测物体精细的三维模型。通过与物体的三维设计模型进行比对,可以得到被测物体的形变。本文依托某海上钻井平台井架病灶检测与修复项目,分析站式三维激光扫描仪P40用于该项目的可行性和优势,借助点云后处理软件Cyclone及专业建模软件3ds Max建立井架的精细三维模型,通过与设计对比找出病灶位置并替换病灶段,很好地解决了传统测量方法无法解决的难题,为相关工程提供了有益借鉴。
猜你喜欢
机床与液压(2022年16期)2022-09-19
西部交通科技(2021年9期)2021-01-11
设备管理与维修(2019年2期)2019-02-22
智能建筑与智慧城市(2018年11期)2018-11-28
测绘工程(2018年3期)2018-03-20
中国资源综合利用(2017年2期)2018-01-22
化工管理(2017年5期)2017-04-11
化工管理(2017年7期)2017-03-04
中国房地产业(2016年2期)2016-03-01
测绘学报(2015年4期)2015-01-14