
基于功率跟随的AUV能量分配策略
2022-01-07 08:43张凌志
电源技术 2021年12期
张凌志,何 波
(中国海洋大学信息科学与工程学院,山东青岛 266100)
随着自主式水下无人潜航器(以下简称AUV)在海洋探索等领域的广泛应用,很多国家均投入了大量的人力、物力,形成了目前AUV 技术研发的新热潮。由于AUV 具有搭载传感器多、活动范围大、适应环境能力强等优点,可以预测AUV将在军事、科研等领域发挥越来越重要的作用[1-2]。
鉴于AUV 特殊的工作环境,电池组是其唯一动力来源,也是AUV 能否正常工作、任务正常执行的关键。因此保障电池组的安全与提高电池组的利用效率将成为AUV 技术的研发重点[3]。目前,常用的能量分配策略有全局最优控制策略[4]、局部最优控制策略[5]、规则式控制策略[6]等。其中,陈维荣等[7]在混合动力汽车中采用了功率跟随策略,实现了节能、增加续航里程的目标。根据国家重点研发计划“基于数据驱动技术和智慧型复合材料的自主式水下航行器研发”项目的需要,针对AUV 特殊的工作特性,本文以实现能量的合理分配、提高AUV 电池组能量的利用效率为研究目标。
1 神经网络构建功率预测模型
1.1 AUV 系统功耗分析
常规AUV 的系统结构见图1,锂离子电池组提供AUV 所需要的所有能量。根据能量守恒定律,AUV 系统的总功率等于仪表系统、动力系统的功率之和。其功率平衡方程为:
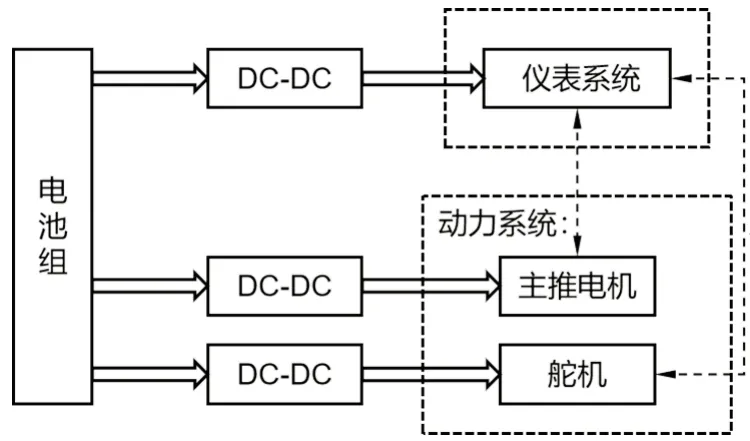
图1 AUV系统结构框架

式中:PAUV为AUV 系统的总功率;PIS为仪表系统所需要的功率;PDS为动力系统所需要的功率。
常规中小型AUV 仪表系统的功能是监控AUV 的实时状态、通过与岸基的通信实现指令的上传下达,可以看出,AUV 仪表系统的功率不大,根据功能需求的不同在40~60 W之间;动力系统的主要用电设备是主推电机和舵机,舵机负责控制AUV 的运动方向,功率在40~50 W 左右,主推电机负责AUV 的前进或后退运动,最大功率可达500 W。因此,管理好主推电机的功率是对AUV 进行能量管理的关键。
1.2 电机功率预测建模
电机是一个非线性、多变量、复杂的时变系统。电机的功率是与电流、转速有关的函数,如公式(2)。想要计算实时的功率,就必须获取实时的效率、电流和转速。如果要预测下一时刻电机的功率,就等同于预测电机在下一时刻的效率、电流和转速。

式中:Pin为电机的输入功率;η 为电机的效率;PA为有功功率;n为实时转速;T 为电机的转矩;I为实时电流;KQ为转矩系数,为定值常数。
通常情况下,AUV 电机的期望转速是由当前航速和期望航速经过控制算法计算得出的,比较容易获取。但是电机的效率受到多种因素的影响,例如负载电流、机械损耗、热损耗等等,难以用数学的方法进行模拟。同样电机的电流受到转速、负载的多重影响,亦无法用简单的数学模型进行预测。因此引入了人工神经网络的概念进行电机功率的预测。
人工神经网络(artificial neural network,ANN)具有自主学习、联想存储的能力,能够高速寻找问题的优化解,同时能够进行复杂模式分类和多维函数映射,能够解决简单感知器不能解决的多种问题。 多层前馈神经网络(multilayer feedforward neural network) 又称BP 神经网络(back propagation neural network),利用梯度下降法和梯度搜索技术,使网络的输出值与期望值的误差、均方差最小[8]。因此,BP 神经网络具有很强的非线性映射能力,网络中的层数、神经元个数可以根据实际应用情况任意调节,其网络结构柔性好。
BP 神经网络的实现过程主要分为两步:正向计算过程和反向计算过程。正向计算过程是输入数据与参考输出数据从输入层流入,并在隐含层中进行处理,结束后转至输出层,其中每一层的神经元状态仅能被上一层所影响;反向计算过程是指一旦输出层没有得到期望的输出结果,便会将误差信号返回,修改各个神经元的参数,重新进行处理,从而使输入数据与期望输出的误差最小。过程如图2 所示。
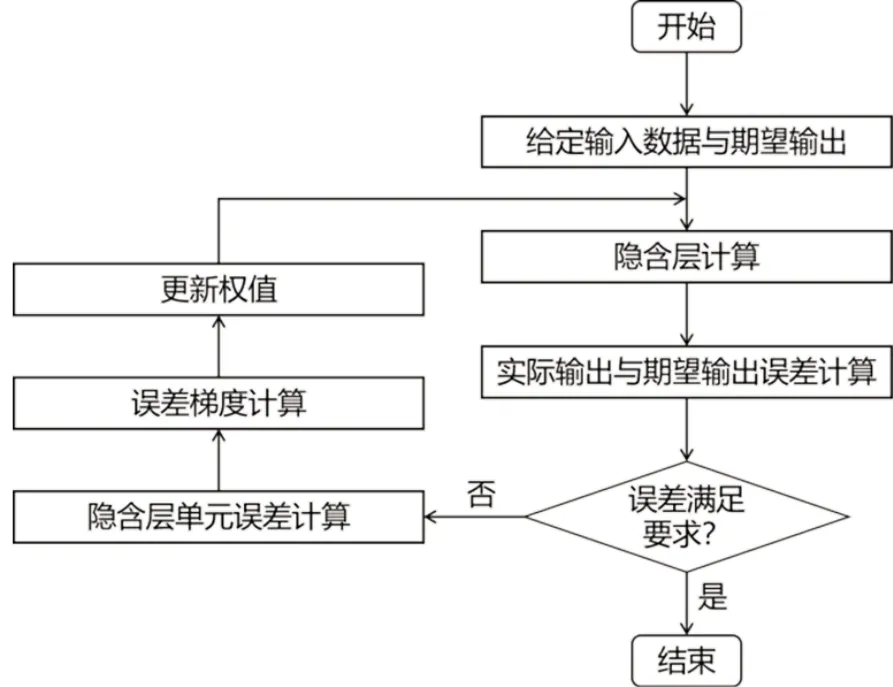
图2 BP神经网络计算流程
考虑到主推电机的实时有功功率是实时电流与实时转速的相关函数,想要进行下一时刻的功率预测,必须引入影响主推电机功率的未来变量。在传统AUV 动力系统中,微控制器通过接收中央控制器发送的期望转速,来改变主推电机的转速,从而达到改变AUV 运动状态的目的。在这个过程中,期望转速不仅仅影响了主推电机的转速,同时影响了主推电机的功率。因此,可以将期望转速作为预测电机功率的未来变量。但期望转速是由AUV 的实时航速与期望航速通过PID 控制算法计算得出的,本身就存在一定的滞后性,一定程度上会影响电机功率预测的实时效果。为了消除期望航速实时性较差的影响,将AUV 的实时航速与期望航速代替期望航速作为神经网络的输入层。
综上所述,本文以当前电流、当前转速、当前航速和期望航速四个影响因素作为神经网络的输入层,以想要预测的下一时刻的电机功率作为输出层,进行模型训练,来消除温度、海流等不可控因素的影响。根据理论经验,对于有四组非线性输入、一组非线性输出的数据,选择15 个隐含层节点数就能够满足系统误差与训练样本的相关需求,本文构建的神经网络模型如图3 所示。
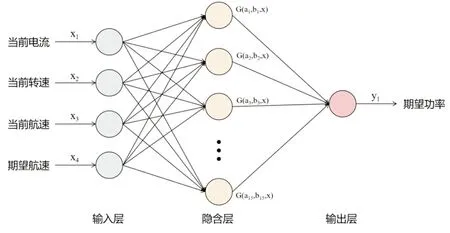
图3 本文建立的BP 神经网络模型
使用Matlab 中工具包对主推电机功率进行建模,将实验测得的参数样本数据导入网络进行训练,设置最大训练次数为1 000 次,期望误差设置为1×10-5。经过训练后的部分训练结果和均方误差如图4 所示,可以看出,网络训练在716 次时均方误差达到最小值,为7.963 3,可以满足AUV 系统的需要。
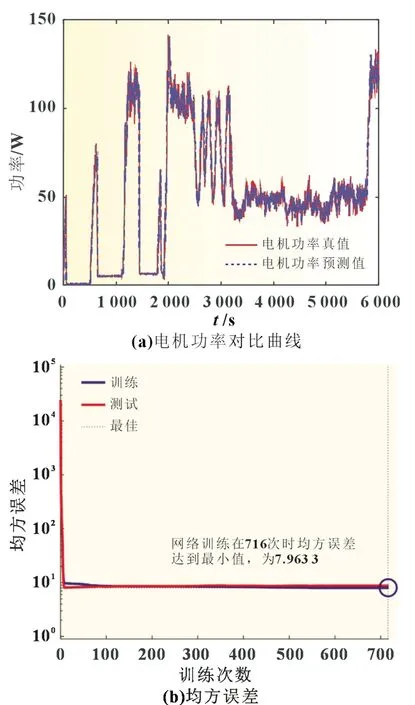
图4 BP 神经网络训练结果
2 功率跟随的能量分配策略
功率跟随控制策略是规则式控制策略的一种,实现方式通常为根据后端负载需求功率的多少,确定前端输出功率的分配情况[9]。应用在AUV 中,即是控制DC-DC 模块输出功率的最大值,使其符合主推电机的期望功率,在不影响AUV 正常运行状态的前提下,实现提高能量利用率和提高系统安全性的目标。但AUV 在水下航行时,AUV 的共组状态受到的海流等外界因素影响严重,简单的能量分配策略可能无法达到良好的效果,如若首先进行工作模式划分,针对不同工作模式采取针对性的方式,有助于提升能量分配的效果。
2.1 AUV 工作模式划分
AUV 的工作模式是根据AUV 航行时某一段时间内的实际情况,经过归纳总结出的具有代表性的工作状态。划分好的AUV 工作模式,可以用于AUV 能量消耗的预测、AUV 性能的评估,有利于对AUV 的能量进行更加细致的能量管理,实现更好的效果。影响AUV 工作模式的因素有很多,例如海流流速、海流方向、当前航速、期望航速、电机转速等等。目前,关于AUV 工作模式的研究较少,缺乏统一的工作模式标准。
在研发、实验的过程中,总结AUV 的运动状态数据,归纳出了一组较为简单的、适用于各种不同型号AUV 的工作模式分组:加速模式、减速模式、巡航模式。加速模式是指AUV 的当前时刻期望航速小于下一时刻期望航速,需要加速或者正处于加速过程状态下的模式;减速模式是指AUV 当前航速大于期望航速,需要减速或者正处于减速过程状态下的模式;巡航模式是指AUV 当前航速基本与期望航速相差无几,仅仅对AUV 的速度进行细微调整的工作模式。
通常情况下,通过前一时刻与后一时刻期望航速的差值,就可以得出AUV 是否需要进行工作模式切换,如式(3)。
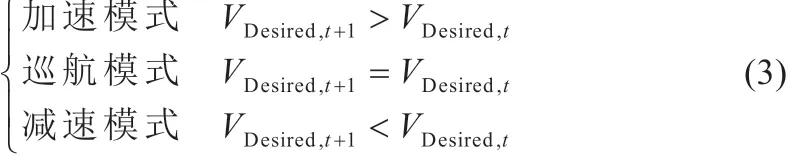
但在实际应用中发现,采用上述方式只能促使AUV 在期望航速变化时进行瞬时的模式切换。而在期望航速变化后的一段时间内,期望航速是新的定值,AUV 便又恢复到了巡航模式,会使能量管理策略失效,失去能量管理的意义。为了解决工作模式切换无效的问题,将AUV 的当前航速也引入模式判断标准中:一旦期望航速发生变化,根据实际情况,进入加速或减速模式,直至AUV 的实际航速到达期望航速附近,再次变为巡航模式。
由于受海流等外部因素影响,AUV 的实时航速存在一定的波动,如果以实时航速是否等于期望航速来判定,难免会造成AUV 在不同模式之间频繁切换,严重影响AUV 系统的稳定。因此,额外设置速度阈值VT作为判断是否进行模式切换的标准:

式中:Vt为t时刻AUV 的实时航速;VDesired,t为t时刻的期望航速;VT为期望航速变化的阈值,用以进行模式判断。
综上所述,本文建立的AUV 工作模式选择方法如图5 所示。
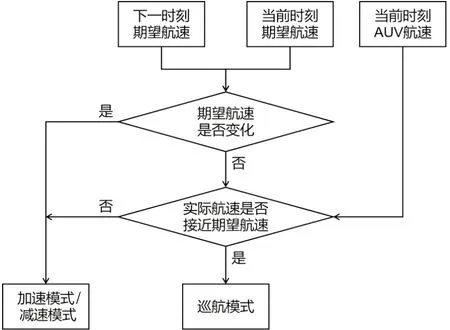
图5 AUV 模式选择思路框图
2.2 功率跟随策略
功率跟随控制策略是指根据后端负载需求功率的多少,确定前端输出功率的分配情况。应用在AUV 中,即是控制DC-DC 功率变换器输出功率的最大值,使其符合主推电机的期望功率,在不影响AUV 正常运行状态的前提下,实现提高能量利用率和提高系统安全性的目标。
鉴于DC-DC 功率变换器是一个时变系统,根据前文建立的AUV 电机功率预测模型,充分考虑不同工作模式下期望达到的效果,使DC-DC 模块的输出功率按照公式(5)变化,通过调节kc来实现不同模式下的功率分配以达到良好效果。

式中:PDC,k为在k时刻DC-DC 功率变换器的输出功率;Pneed,k为k时刻电机的需求功率;kc为调节系数。
加速模式下,当kc为1 时,PDC,k=Pneed,k,DC-DC 功率变换器容易激变,影响电池组的使用寿命。kc越小,越能抑制功率的激变,从而达到提高电池组放电安全性的目标。为了不影响AUV 的各项性能以及任务执行能力,在加速模式下kc不应太小,应根据功率分配后AUV 的响应速度来确定。同时考虑到电池组的输出能力随着电压的降低而降低,在加速模式下将kc设置为一个随电池组电压变化而变化的常数,如公式(6)。

式中:UT为电池组的端电压;VH为电池组的最高放电电压;VL为电池组的最低放电电压。
在巡航模式下,虽然AUV 的实时航速会受海流等多种因素影响而出现不可预测的变化,但AUV 会通过内置PID 算法进行实时修正,同时稳定的期望航速也会使主推电机的需求功率处于一个相对稳定的区间。此时,kc应该是一个比较小的值,从而使DC-DC 模块的输出功率稳定,经过实验分析,本文设置AUV 在巡航模式下kc=0.01。
在减速模式下,受到惯性和水中阻力的共同作用,AUV速度会快速下降,DC-DC 的输出功率也会快速衰减。此时,若kc较小,将会严重影响AUV 的减速效率,造成能量浪费,因此,在减速模式下kc应当是一个较大的值。本文设置AUV 在减速模式下kc=1,以保证AUV 的减速效率,减少能量浪费。
最终建立的功率跟随的能量管理策略如图6 所示。
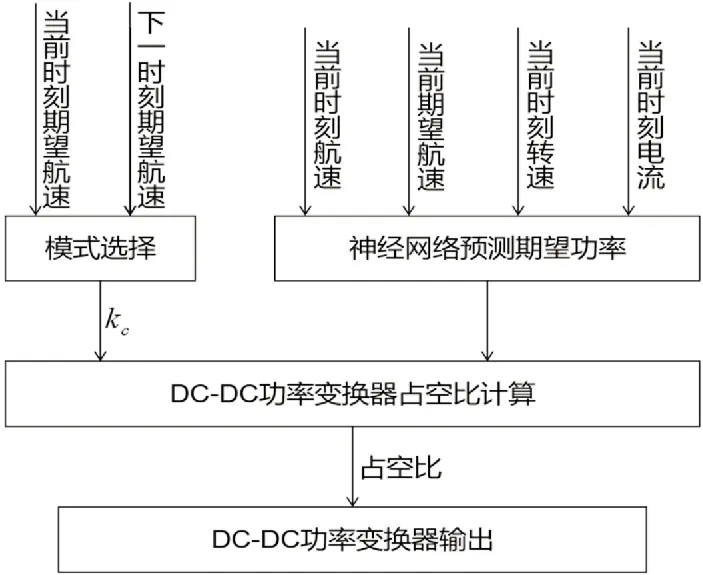
图6 AUV 能量分配策略
3 实验分析
以中国海洋大学UVL 实验室设计研发的210 型旗鱼AUV 为实验对象,其电池组参数如表1 所示。210 型旗鱼AUV 实物如图7 所示。

表1 旗鱼210 型AUV 电池组参数
图7 210型旗鱼AUV
提取AUV 在南海中进行定点巡航实验数据,并进行分析。图8 为AUV 中DC-DC 功率变换器输出的最大功率对比与进行能量分配前后的功率差值。
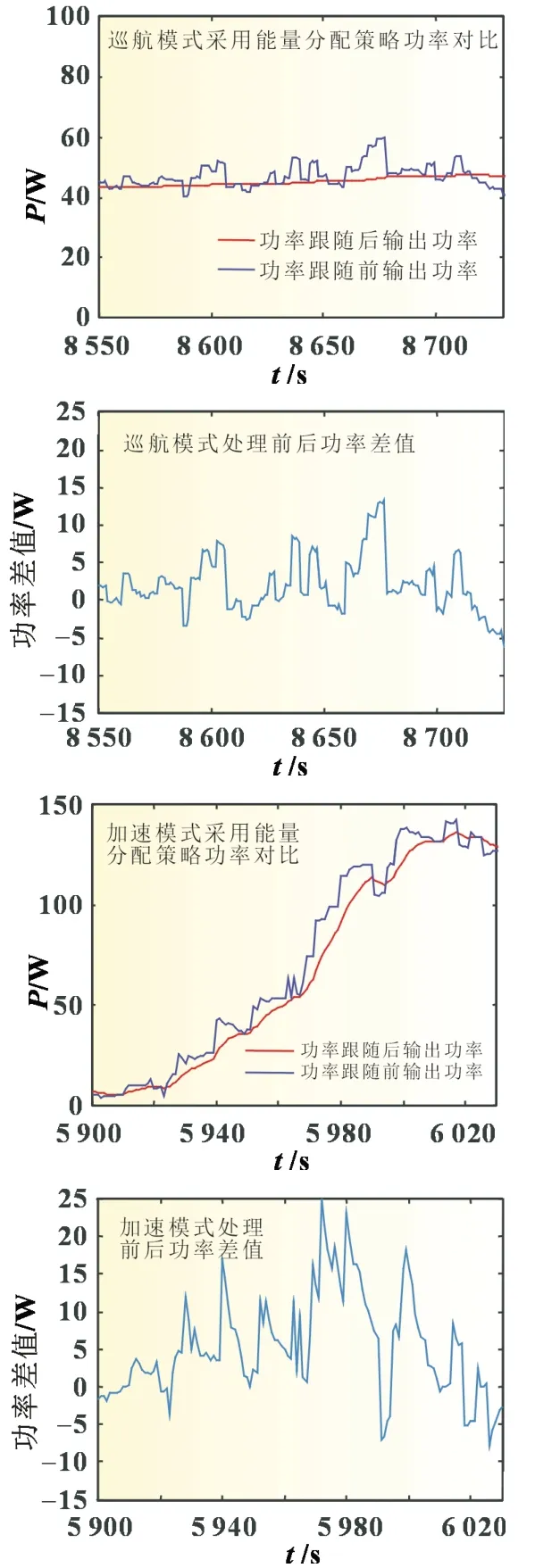
图8 DC-DC功率变换器输出功率对比图
由图8 可以得到,在AUV 巡航模式下,采用功率跟随能量分配策略的AUV 主推电机输入功率明显更加平稳,有效削减了输入功率的毛刺,节约了4.2% 的能量。在加速模式下,采用功率跟随的能量分配策略的电机输入功率稍微滞后于未采用能量分配策略时的输入功率,AUV 正常的运行并没有受到影响,有效平滑了电机功率的变化过程,同时节约了7.4% 的能量。由于减速模式下,与未采用能量分配策略的结果无异,因此不做讨论。
此外,在加速模式下,AUV 电池组的电压越高,DC-DC功率变换器输出功率的变化率越大;反之,输出功率的变化率越小。那么在AUV 运作的过程中,随着电池组电压的逐渐降低,其输出功率将变得愈发平缓。反馈到AUV 的加速过程中,就是AUV 的加速效率会随着电池组电压的降低而变慢,从而减少了电池组输出电流激变发生的概率,同样提高了电池组放电的安全性。
4 结语
本文融合了AUV 的实时状态和期望航速,利用BP 人工神经网络构建了结合AUV 实时状态与期望航速的电机功率预测模型,设计了一种基于功率跟随的具有根据电压动态调节功能的AUV 电源能量分配控制策略。在实际应用中进行了验证分析,结果表明:考虑任务需求的能量分配办法能够在AUV 需求变化频繁的时候平缓电池组的输出;相比于传统的能量分配策略,考虑任务需求的能量分配方法能够节约4.2%~7.4% 的能量。所使用的控制策略能够有效延长动力电池的使用寿命,提升了AUV 电池组的能量利用效率。研究成果对开发AUV 电源高效能量管理方法有重要意义。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
水上消防(2022年1期)2022-06-16
舰船科学技术(2018年7期)2018-07-25
消费导刊(2017年19期)2017-12-13
舰船科学技术(2016年1期)2016-02-27
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09
燕山大学学报(2014年2期)2014-03-11
