
基于语音识别与按键触发双模式的智能垃圾分类系统
2022-01-06 11:13青岛理工大学张旭赵玉琛李德民程钧
数字技术与应用 2021年12期
青岛理工大学 张旭 赵玉琛 李德民 程钧
本文设计了一款包含语音识别、按键触发、垃圾智能分类、语音播报、休眠节能等功能的智能分类垃圾桶,可以有效提升居民对垃圾分类知识的掌握,帮助居民高效准确分类,帮助居民准确分类投放垃圾。同时,语音识别、自动打包、满箱检测功能可以帮助居民享受智慧化的物联网生活,在实现生态可持续化发展的前提下享受更高品质的生活,并加快城市垃圾分类系统形成,从而加快垃圾分类在全国范围内推广的步伐。
0 引言
近年来,我国在大力推行垃圾分类政策,但是在垃圾分类工作的推行过程中,居民普遍存在“垃圾分类知晓率低、投放准确率低”的问题,需要在投放时反复确认,或者被要求重新分类的等问题,降低了回收效率,对后续城市垃圾处理与回收工作产生的一定阻碍。所以,如何解决居民投放垃圾准确率低,降低垃圾回收站工作量,则成为继续推行垃圾分类政策、加快城市形成高效有序的垃圾分类系统亟待解决的问题。为了解决上述问题,我们研发了一款包含语音识别、按键触发、垃圾智能分类、语音播报、休眠节能等功能的智能分类垃圾桶,可以有效提升居民对垃圾分类知识的掌握,帮助居民高效准确分类。
1 整体设计
垃圾桶顶端设计了显示屏,可以显示垃圾名称、时间、剩余电量等信息。投放口设置为倒放四棱锥,四棱锥的四个侧面分别对应四种不同的垃圾种类,当单片机控制系统收到垃圾投放指令时,内置语音模块进行语音识别分析出垃圾种类,并且控制相应的舵机转动,使桶盖以正方形四条边为轴线向下旋转打开,垃圾投入后会自动滑落的桶盖实现垃圾分类,如图1所示。
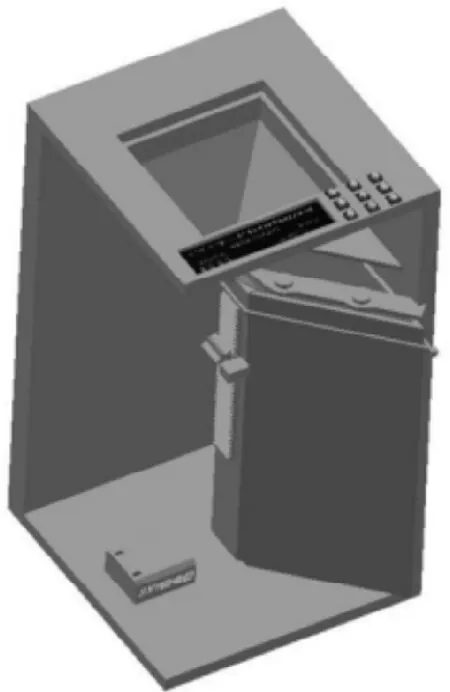
图1 结构图Fig.1 Structure diagram
2 控制系统硬件设计
控制系统以STM32F103ZET6单片机为核心,由电源模块、语音播报模块、语音识别模块、按键输入模块、红外感应模块、舵机模块组成[1-3]。
(1)STM32F103ZET6单片机。本次设计采用的主控为STM32F103ZET6,它是一种嵌入式-微控制器的集成电路(IC),是由ST公司开发的STM32F1系列的其中一种。其时钟频率达到72MHz,是同类产品中性能最高的产品。(2)电源模块。由12V锂电池供电,为了满足不同设备的电压需求,我们采用了TI公司生产的LMR16020芯片进行降压。通过设计一个电源板,利用LMR16020分别输出6V、5V和3V3的电压供模块使用。(3)语音播报模块。语音播报模块选用XFS5152CE语音合成芯片。当控制器通过语音识别判断完所投放垃圾种类后,语音播报模块会根据设定的程序播报出该垃圾所属种类,并且在完成打包后鸣起提示音示意用户及时倾倒垃圾和更换垃圾袋。(4)语音识别模块。采用LD3320芯片,基于MFCC和BP神经网络两种算法,该模块设有语音识别芯片、数字转化器、参数存储器等,语音信息输入控制器后会进行识别,并且按照规定的形式输出结果。(5)红外感应模块。利用红外辐射的热效应,探测器的敏感元件吸收辐射能后引起温度升高,进而使某些有关物理参数发生变化,通过测量物理参数的变化来确定探测器所吸收的红外辐射[4]。当传感器检测到用户靠近时,会唤醒休眠状态下的垃圾桶。(6)舵机模块。采用MG996R舵机,舵机模块驱动桶盖打开,系统采用四路伺服舵机与桶盖相连接,制成电力驱动的开合结构,根据系统语音识别垃圾种类打开相应桶盖。整体板设计如图2所示。
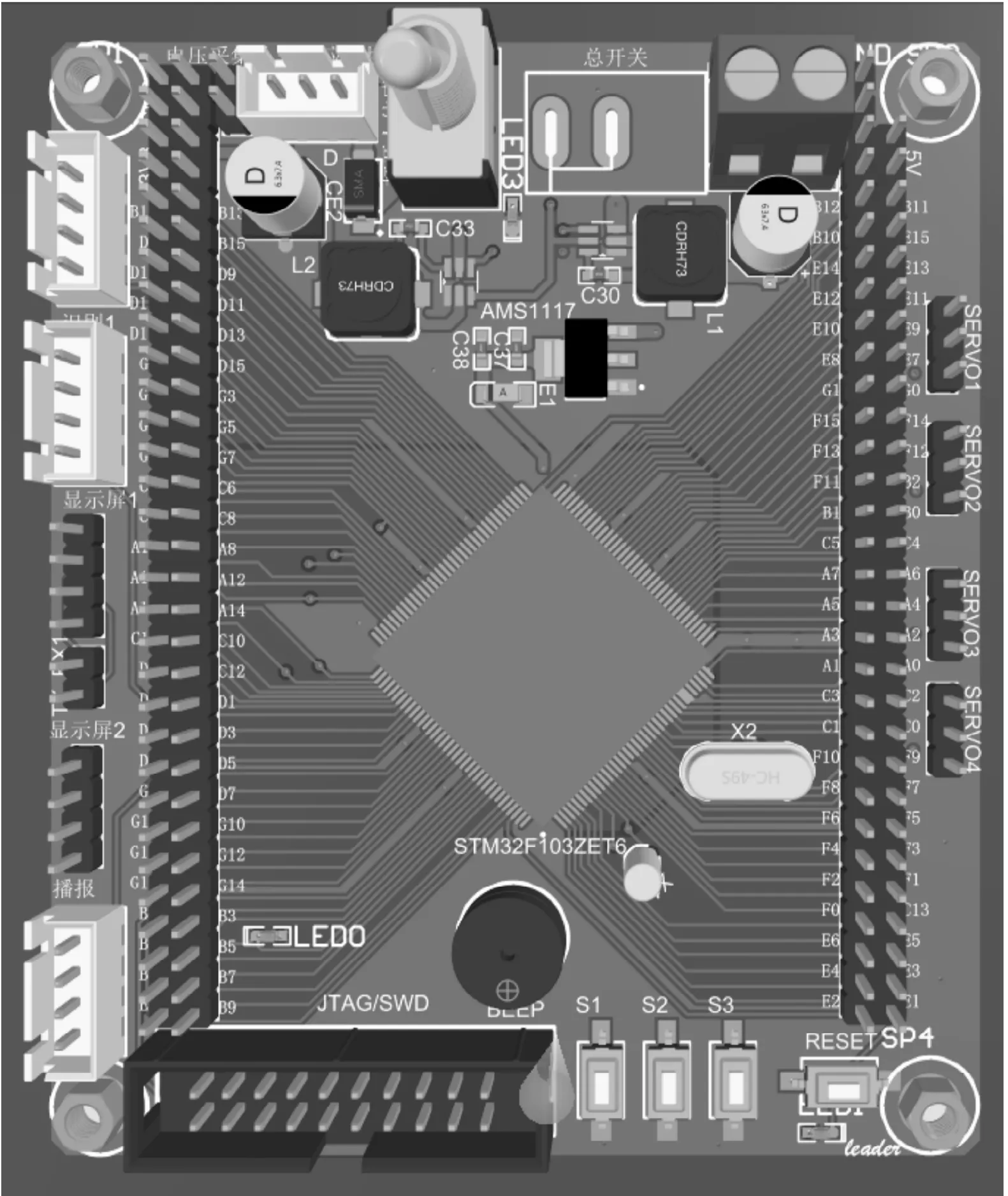
图2 整体板设计Fig.2 Integral plate design
3 控制系统软件设计
语音识别部分中采用MFCC算法进行语音信号特征提取,首先对接受的时域信号通过傅里叶变换转换到频域,再通过滤波器对频域信号进行选择,将声音信号转变为具体的数据特征,可通过梅尔刻度计算和倒谱分析实现此过程。对于转换得到的语音特征数据,设计BP神经网络算法进行信号的对比识别,并以网络误差平方为目标函数、采用梯度下降法来计算目标函数的最小值,实现目标的最优分类[5]。
3.1 语音识别及分类功能
基于收到的语音信息进行分类处理,首先进行语音识别网络的构建,获取多类别语音数据,利用特征提取算法构造特征向量,输入BP神经网络进行网络训练,构建3层语音识别网络。然后输入待检测的语音信号,利用训练好的网络对待检测数据进行识别,获得识别结果,驱动操作模块进行垃圾自动分类。
语音数据库代码(部分):

3.2 按键控制功能
按键输入,通过按键控制垃圾桶盖的定位以及自动开启与关闭。单片机接收按键输入垃圾类别信号后,会控制舵机驱动开启相应桶盖,经一定延迟时间后自动关闭。
3.3 超声波容量检测
容量检测的原理是计算距离,需要在Trig管脚输入一个10US以上的高电平,系统便可发出8个40kHz的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过Echo管脚输出。根据Echo管脚输出高电平的持续时间可以计算距离值,即距离值为:(高电平时间*340m/s)/2。当接收到US-015通过Echo管脚输出的高电平脉冲后,便可进行下一次测量,所以测量周期取决于测量距离,当US-015距离被测物体很近时,Echo返回的脉冲宽度较窄,测量周期就很短;当US-015距离被测物体比较远时,Echo返回的脉冲宽度较宽,测量周期也就相应的变长,脉冲宽度最长80ms对应最远测量距离[6]。
3.4 语音播报功能
语音播报与主控制器之间选用IIC通讯方式,按照规律向SD卡中存储提前录制好的音频,软件中包括音频文件的选取、音量设置等。根据语音数据库的编码以及超声波测距的返回值作为基准进行特定的语音播报。
3.5 低功耗休眠功能
在长时间没有收到指令后,主控单片机自动进入低功耗模式,此时将各个功能停止,置于垃圾桶上方的红外传感器启动,当再次检测到垃圾桶上方有人体时,垃圾桶再次启动,正常给各个部分供电,这样的处理将大程度上减少无人使用期间智能垃圾桶电量的消耗。
3.6 低功耗休眠功能
在长时间没有收到指令后,主控单片机自动进入低功耗模式,此时将各个功能停止,置于垃圾桶上方的红外传感器启动,当再次检测到垃圾桶上方有人体时,垃圾桶再次启动,正常给各个部分供电,这样的处理将大程度上减少无人使用期间智能垃圾桶电量的消耗。
4 样机调试和功能测试
设计系统通电,连接数据库,选择样本数据测试,测试识别分类速度和准确性,统计结果见表1。

表1 测试结果Tab.1 Test result
5 结语
本文设计并开发了一种以STM32F103ZET6单片机为核心的控制系统。基于语音识别与按键触发的双模式,含语音识别、垃圾智能分类、语音播报等基本功能。当用户触发位于垃圾桶上方的红外感应器来启动智能垃圾桶,用户无法确认垃圾种类时,说出垃圾的名称,智能分类垃圾桶通过构建好的语音信号识别模块确认垃圾种类,然后舵机驱动垃圾桶盖定位至打开状态,同时语音播报该垃圾所属种类。
引用
[1] 赵东升,刘忠富,张笑彤.基于STM32单片机的智能家庭电控系统设计[J].山西电子技术,2021(1):3-5+7.
[2] 耿子进.基于单片机的语音播报器的设计[J].科学技术创新,2021(10):188-189.
[3] 王乾.基于VOIP的语音通信系统设计[J].中国高新科技,2020(24):61-63.
[4] 刘小莉,邵晶,肖帅,等.基于STM32单片机的人体红外感应系统硬件平台设计[J].自动化应用,2018(1):7-9.
[5] 程春雨,刘正龙,颜科宇,等.基于BP神经网络的用电器识别系统设计[J].实验科学与技术,2021(2):11-16.
[6] 李晓丽,王娟.超声波检测技术中的数字信号处理方法[J].电子测试,2021(7):98-99+67.
猜你喜欢
电子制作(2021年3期)2021-06-16
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电子制作(2016年1期)2016-11-07
舰船科学技术(2015年8期)2015-02-27
家电科技(2013年4期)2013-07-09
单片机与嵌入式系统应用(2011年10期)2011-06-25
